递推线性最小均方估计
- 格式:pdf
- 大小:354.77 KB
- 文档页数:9
一句话讲明白卡尔曼滤波卡尔曼滤波是一种基于状态空间模型的估计算法,通过对系统状态进行预测和更新,从而提高对系统状态的估计精度。
它是一种递归滤波算法,能够有效地处理含有噪声的测量数据,广泛应用于航空航天、导航定位、无线通信等领域。
以下是对卡尔曼滤波的十个要点的介绍:1. 状态空间模型:卡尔曼滤波基于状态空间模型,将系统的状态表示为一个向量,通过状态转移矩阵描述系统状态的演化规律。
2. 预测步骤:卡尔曼滤波首先通过状态转移矩阵和控制输入预测系统的下一时刻状态,得到预测状态向量和预测误差协方差矩阵。
3. 更新步骤:卡尔曼滤波利用测量数据对预测状态进行修正,得到更新后的状态估计向量和更新后的误差协方差矩阵。
4. 估计误差:卡尔曼滤波通过误差协方差矩阵描述状态估计的精度,该矩阵可以通过预测和更新步骤进行递推计算。
5. 测量模型:卡尔曼滤波通过测量模型将系统状态和测量结果联系起来,测量模型可以是线性或非线性的。
6. 噪声模型:卡尔曼滤波假设系统和测量中存在随机噪声,通过噪声协方差矩阵描述噪声的统计特性。
7. 最小均方误差准则:卡尔曼滤波通过最小化均方误差准则,优化状态估计的精度,使得估计结果尽可能接近真实值。
8. 递归计算:卡尔曼滤波是一种递归算法,通过不断迭代更新状态估计,实现对系统状态的连续估计。
9. 初始条件:卡尔曼滤波需要给定初始状态估计和初始误差协方差矩阵,通常通过历史数据或先验知识进行初始化。
10. 优势和应用:卡尔曼滤波具有高效、精确、鲁棒的特点,被广泛应用于导航定位、目标跟踪、机器人定位与导航等领域,在实时性和稳定性要求较高的系统中得到了广泛应用和研究。
卡尔曼滤波是一种基于状态空间模型的递归滤波算法,通过预测和更新步骤对系统状态进行估计,以提高状态估计的精度。
它通过最小化均方误差准则和递归计算的方式,能够有效地处理含有噪声的测量数据,在航空航天、导航定位等领域得到了广泛应用。
公交车辆行程到站时间预测模型优化研究刘兆祥【摘要】随着智能公交系统的发展,有效提高公交车辆到站时间预测精确率,是提升公共交通服务水平,结合智能交通(ITS)发展的关键举措.在结合公交车辆GPS运行数据的基础上,构建卡尔曼滤波与支持向量机结合的预测模型.最后,应用山东省日照市19路公交线路的公交运行数据对该模型进行校验,并评价该模型的预测精确程度,评价结果表明,对公交到站时间据本文模型有较高的预测精度.【期刊名称】《内蒙古公路与运输》【年(卷),期】2016(000)004【总页数】4页(P56-59)【关键词】公交到站时间;SVM支持向量机;卡尔曼滤波;公交预测;GPS【作者】刘兆祥【作者单位】长安大学公路学院,陕西西安 710064【正文语种】中文【中图分类】U491进入大数据时代,实时的公交到站时间信息是智能公交(ITS)发展的基础,准确的公交到站信息能够减少乘客的候车时间,合理安排出行计划,提高公共交通的吸引力[1]。
为此国内外学者进行了大量的探索研究,Patnaik和Chien[2]利用上下公交车的乘客数量和车辆延误时间,提出了基于多变量回归算法的车辆到站时刻预测模型。
周雪梅,杨晓光[3]等通过研究公交车辆驶于相邻公交站点间的时间建立回归函数,利用历史数据标定回归参数,预测公交车辆的到站时间。
杨兆升[4]等采用模糊回归方程构造了行程时间的预测模型。
温惠英,徐建闽,傅惠[5]基于灰色理论分析影响行程时间的各个因素的灰色关联,对常规滤波预测模型进行优化,结果表明,优化后的卡尔曼滤波模型要优于常规的卡尔曼滤波[8]模型。
Cathey[6]等开发了基于GPS系统的公交车辆到站时间预测模型,经研究表明,该模型精度高于传统时刻表算法。
于滨[7]建立了基于路段当前行程时间和之前路段行程时间的支持向量机模型[9]。
公交车到站时间是评价城市公交服务水平的重要指标之一。
公交车辆到站时间由路段行驶时间和站点停靠时间组成,因此在研究构建公交车辆到站时间的预测模型时,要综合考虑两部分的影响因素。
1. 卡尔曼全名Rudolf Emil Kalman ,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。
1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。
1957年于哥伦比亚大学获得博士学位。
我们现在要学习的卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems 》(线性滤波与预测问题的新方法)。
基于状态空间描述对混有噪声的信号进行滤波的方法,简称卡尔曼滤波。
这种方法是R.E.卡尔曼和R.S.布什于1960和1961年提出的。
卡尔曼滤波是一种切实可行和便于应用的滤波方法,其计算过程通常需要在计算机上实现。
实现卡尔曼滤波的装置或软件称为卡尔曼滤波器。
卡尔曼滤波器(Kalman Filter )是在克服以往滤波方法局限性的基础上提出来的,是一个最优化自回归数据处理算法(optimal recursive data processing algorithm )。
它是针对系统的部分状态或是部分状态的线性组合,且量测值中有随机误差(常称为量测噪声)。
将仅与部分状态有关的测量进行处理,得出从某种统计意义上讲误差最小的更多状态的估值,从而将混有噪声(干扰)的信号中噪声滤除、提取有用信号。
卡尔曼滤波是一种递推线性最小方差估计,以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
现设线性时变系统的离散状态方程和观测方程为:()()()()()X k+1F k X k G k u k ()w k =•++()()()()k+1H k+1X k+1k+1Y v =•+其中()k X 和()k Y 分别是k 时刻的状态矩阵和测量矩阵()k F 为状态转移矩阵()k G 为系统控制项矩阵()k u 为k 时刻对系统的控制量()k w 为k 时刻动态噪声,其协方差()Q k()k H 为k 时刻观测矩阵()k v 为k 时刻测量噪声, 其协方差()R k则卡尔曼滤波的算法流程为:状态的一步预估计()()()()()ˆˆXk+1k F k X k k G k u k |=•|+ 一步预估计协方差矩阵()()()()()C k+1k F k C k k F k Q k '|=•|+'计算卡尔曼增益矩阵()()()()()S k+1H k+1C k+1k H k+1k 1R ''=|•++()()()()1K k+1C k+1k H k+1k 1S-'=|•+状态更新方程 ()()()()ˆX k+1k+1Xk+1k+1K k+1V k+1|=|+ ()()()ˆV k+1Z k+1Zk+1k =-| ()()()ˆˆZk+1k H k 1X k+1k |=+| 计算更新后估计协方差矩阵()()()()C k+1k+1I K k+1H k+1C k+1k |=-|⎡⎤⎣⎦或是()()()()()C k+1k+1C k+1k K k+1H k+1C k+1k |=|-|离散时间线性系统卡尔曼滤波算法流程2.卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理算法(optimal recursive data processing algorithm)。
学生毕业论文(设计)题目:基于LMS算法的时域均衡器的设计及仿真摘要本文介绍了自适应均衡器的发展历史,分析了信道,产生码间干扰的原因以及无码间干扰的条件;阐述了时域均衡器的工作原理,介绍了如何用有限长横向滤波器来实现时域均衡的效果;阐述了lms算法的原理;最后结合时域均衡器的原理以及lms算法原理在matlab中设计了理想效果的均衡器,并通过变步长,对所设计的均衡器效果进行判断。
结果表明:1.步长为越长时,均衡器在收敛越快;但步长越大,均衡器收敛效果不好,步长越短时,均衡器收敛越慢,但收敛效果较好;关键词:时域均衡器;lms算法;matlab仿真ABSTRACTThis paper introduces the development history of the adaptive equalizer, analyzes the channel, produce the isi reason and no interference between conditions; Describes the working principle of the time-domain equalizer, and introduced how to use limited long horizontal filter to achieve the effect of time domain equilibrium; Expounds the principle of LMS algorithm; The last time the principle of combining the equalizer and LMS algorithm of the matlab design principle in the ideal effect equalizer, and through the variable step long, the design of equalizer effect judgment. The results show that: 1. Step of the long, equalizer in the faster convergence; But step length, the bigger the equalizer convergence result is bad, the longer the short-term, equalizer convergence more slow, but convergence effect is better;Key ward:time-domain equalizer; lms-algorithm; matlab-simulation目录1绪论 (1)1.1 课题研究的意义 (1)1.2 均衡器发展及研究状况 (1)1.3 均衡技术简介 (2)1.4信道、码间干扰 (2)1.4.1信道 (2)1.4.2码间干扰 (3)1.5 本论文的主要研究内容 (3)2.时域均衡器的原理 (4)2.1时域均衡器概括 (4)2.2时域均衡器的工作原理 (4)2.3有限长横向滤波器 (6)3 LMS 算法 (8)3.1 LMS算法原理 (8)3.2 LMS算法实现 (11)4自适应均衡器在matlab的仿真 (12)4.1matlab介绍 (12)4.2自适应均衡器在matlab中的实现 (12)结论 (17)致谢 (18)参考文献....................................................... 错误!未定义书签。
短波数字通信自适应均衡技术研究作者:肖金光周新力杨静国来源:《现代电子技术》2008年第01期摘要:短波信道的时变性可导致数据通信产生严重的码间串扰,必须选择合适的自适应均衡器,以便最大限度地降低码间串扰的影响,从而降低数据通信的误码率。
通过比较选择适用于短波信道的自适应均衡器结构及其自适应算法,并通过仿真验证了采用平方根卡尔曼算法和判决反馈结构均衡器的性能。
关键词:码间串扰;自适应均衡器;判决反馈;平方根卡尔曼中图分类号:TN919 文献标识码:A文章编号:Research on Adaptive Equalizer Technology for the Digital Communication on Shortwave(Naval Aeronautical Engineering Institute,Yantai,26Abstract:Data transmission on shortwave channel could be disturbed by severe Inter Symbol Interrupt (ISI).This deserves proper adaptive equalizer to depress the influence of ISI,then BER will be reduced.This paper chooses a suitable adaptive equalizer with decision feedback structure andKeywords:短波信道是时变的,具有多径延迟、衰落等特性。
当数据信号在HF信道传输时,主要受乘性干扰和加性干扰影响,加性干扰造成的错码主要采用差错控制技术来解决。
乘性干扰导致码间串扰,对固定特性的信道,可以采用收发匹配滤波器来消除,但对于时变的短波信道,信道的参数是变化的,必须采用自适应均衡技术,即必须自适应调节均衡器的抽头系数以跟踪信道变化。
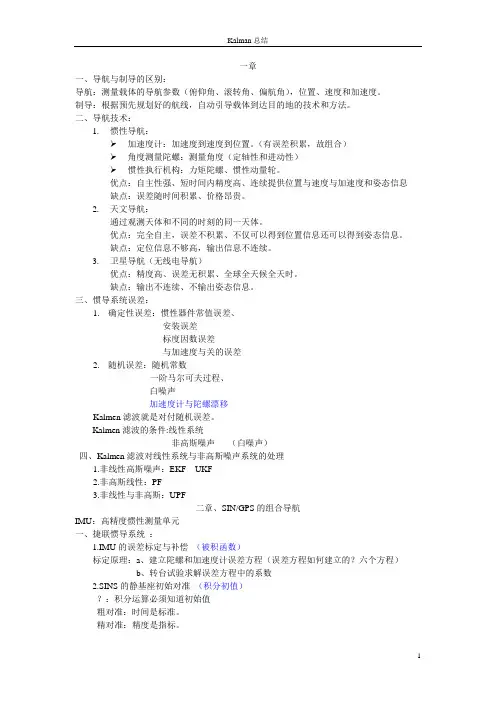
一章一、导航与制导的区别:导航:测量载体的导航参数(俯仰角、滚转角、偏航角),位置、速度和加速度。
制导:根据预先规划好的航线,自动引导载体到达目的地的技术和方法。
二、导航技术:1.惯性导航:加速度计:加速度到速度到位置。
(有误差积累,故组合)角度测量陀螺:测量角度(定轴性和进动性)惯性执行机构:力矩陀螺、惯性动量轮。
优点:自主性强、短时间内精度高、连续提供位置与速度与加速度和姿态信息缺点:误差随时间积累、价格昂贵。
2.天文导航:通过观测天体和不同的时刻的同一天体。
优点:完全自主,误差不积累、不仅可以得到位置信息还可以得到姿态信息。
缺点:定位信息不够高,输出信息不连续。
3.卫星导航(无线电导航)优点:精度高、误差无积累、全球全天候全天时。
缺点:输出不连续、不输出姿态信息。
三、惯导系统误差:1.确定性误差:惯性器件常值误差、安装误差标度因数误差与加速度与关的误差2.随机误差:随机常数一阶马尔可夫过程、白噪声加速度计与陀螺漂移Kalmen滤波就是对付随机误差。
Kalmen滤波的条件:线性系统非高斯噪声(白噪声)四、Kalmen滤波对线性系统与非高斯噪声系统的处理1.非线性高斯噪声:EKF UKF2.非高斯线性:PF3.非线性与非高斯:UPF二章、SIN/GPS的组合导航IMU:高精度惯性测量单元一、捷联惯导系统:1.IMU的误差标定与补偿(被积函数)标定原理:a、建立陀螺和加速度计误差方程(误差方程如何建立的?六个方程)b、转台试验求解误差方程中的系数2.SINS的静基座初始对准(积分初值)?:积分运算必须知道初始值粗对准:时间是标准。
精对准:精度是指标。
3. 惯导系统的误差根源是:加速度计偏置与陀螺漂移,属随机误差(?标定误差,初始对准?)消除随机误差用卡拉曼滤波。
4. 惯导系统误差方程1. 计算地理坐标系法 Ψ角误差方程(???????? 方程的建立及化简推导)δV 、r 和Ψ分别为速度、位置和姿态矢量 Ω为地球自转角速度ω为导航坐标系相对惯性坐标系的角速度矢量 ▽是加速度计常值偏值,ε是陀螺常值漂移 f 是比力,△g 是重力矢量计算误差,2. 真实地理坐标系法Ψ角误差方程:在静基座条件下,最终可得:静基座条件下的误差方程:二、kalman 方程的建立(作业)1.建立系统方程Vr r δρ=⨯+.()gf V V ∆+⨯Φ-∇=⨯+Ω+δωδ.εωψ=ψ⨯+.LE E δ+ψ=ΦL N N cos δλ+ψ=ΦLD D sin δλ-ψ=ΦL L L NN ⋅-+ψ=Φsin cos δλλδL EE δ+ψ=ΦL L L DD ⋅--ψ=Φcos sin δλλδN N DE E N R V L R V L ε+ψ+⎪⎭⎫ ⎝⎛+Ωψ-=ψtan sin E E D E N E R V L L R V L ε+⎪⎭⎫ ⎝⎛+Ωψ+⎪⎭⎫ ⎝⎛+Ωψ=ψcos tan sin D E E N N D R V L R V ε+⎪⎭⎫ ⎝⎛+Ωψ-ψ-=ψcos N E E N L L L R V εδ+ΩΦ-Ω-=Φsin sin E D N N E L L R V ε+ΩΦ+ΩΦ+-=Φcos sin D E E D L L L L RV εδ+ΩΦ-Ω--=Φcos cos tan N V RL δδ1= L RV E sec δλδ=2.建立量测方程(那个可以观测?)3.离散kalman 滤波方程 三、静基坐对准提高静基座对准的精度和速度的方法: 四、GPS 动态滤波的数学方程什么意思? 五、最小二乘法最优估计(只要使函数值最小即可) 最小方差估计(方差最小) 最小二乘估计:三章kalman 滤波原理(课本二五章)Kalman 方程就是递推线性最小方差估计。
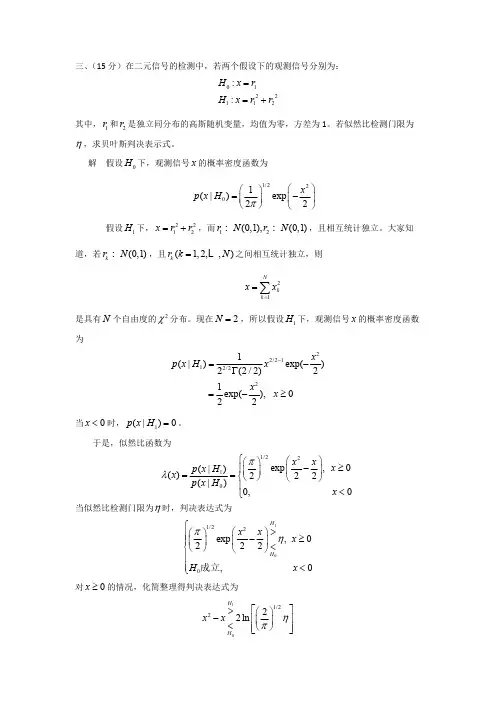
三、(15分)在二元信号的检测中,若两个假设下的观测信号分别为:0122112::H x r H x r r ==+其中,和是独立同分布的高斯随机变量,均值为零,方差为1。
若似然比检测门限为1r 2r ,求贝叶斯判决表示式。
η解 假设下,观测信号的概率密度函数为0H x 1/2201(|)exp 22x p x H π⎛⎫⎛⎫=- ⎪⎪⎝⎭⎝⎭假设下,,而,且相互统计独立。
大家知1H 2212x r r =+12(0,1),(0,1)r N r N ::道,若,且之间相互统计独立,则(0,1)k r N :(1,2,,)k r k N =L 21Nk k x x ==∑是具有个自由度的分布。
现在,所以假设下,观测信号的概率密度函数N 2χ2N =1H x 为22/2112/221(|)exp()2(2/2)21exp(),022x p x H x x x -=-Γ=-≥当时,。
0x <1(|)0p x H =于是,似然比函数为1/2210exp ,0(|)()222(|)0,0x x x p x H x p x H x πλ⎧⎛⎫⎛⎫-≥⎪ ⎪ ⎪==⎨⎝⎭⎝⎭⎪<⎩当似然比检测门限为时,判决表达式为η11/220exp ,0222,0H H x x x H x πη⎧⎛⎫>⎛⎫⎪-≥⎪ ⎪ ⎪<⎝⎭⎨⎝⎭⎪⎪<⎩成立对的情况,化简整理得判决表达式为0x ≥11/2222ln H H x x ηπ⎡⎤>⎛⎫-⎢⎥⎪<⎝⎭⎢⎥⎣⎦四、(15分)已知被估计参量的后验概率密度函数为θ2(|)()exp[()],0p x x x θλθλθθ=+-+≥(1)求的最小均方误差估计量 。
θ^mse θ(2)求 的最大后验估计量 。
θ^map θ 解 (1)参量的最小均方误差估计量是的条件均值,即θ^mse θθ^0220221(|)()[()]1()()2,mse p x d x exp x d x x x x θθθθλθλθθλλλλ∞∞+==+-+=++=≥-+⎰⎰^0,mse x θλ=<-(2)由最大后验方程^ln (|)|0map p x θθθθ=∂=∂得^2[ln()ln ()]1()|0mapx x x θθλθλθθλθ=∂++-+∂=-+=解得^^1,0,map map x x x θλλθλ=≥-+=<-七、(15分)若对未知参量进行了六次测量,测量方程和结果如下:θ182222202384404384n θ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦设初始估计值和估计量的均方误差分别为:^2000,θε==∞试用递推估计求的线性最小二乘估计量和估计量的均方误差θ^^1def s k θθ=;并将最终结果与非递推估计的结果进行比较。
RLS 和LMS 自适应算法分析摘要:本文主要介绍了自适应滤波的两种算法:最小均方(LMS, Least Mean Squares)和递推最小二乘(RLS, Recursive Least Squares)两种基本自适应算法。
我们对这两种基本的算法进行了原理介绍,并进行了Matlab 仿真。
通过仿真结果,我们对两种自适应算法进行了性能分析,并对其进行了比较。
用Matlab 求出了LMS 自适应算法的权系数,及其学习过程曲线,和RLS 自适应权系数算法的学习过程。
关键词:自适应滤波、LMS 、RLS 、Matlab 仿真Abstract: this article mainly introduces two kinds of adaptive filtering algorithms: Least Mean square (LMS), further Mean Squares) and Recursive Least Squares (RLS, Recursive further Squares) two basic adaptive algorithm. Our algorithms of these two basic principle is introduced, and Matlab simulation. Through the simulation results, we have two kinds of adaptive algorithm performance analysis, and carries on the comparison. Matlab calculate the weight coefficient of the LMS adaptive algorithm, and its learning curve, and the RLS adaptive weight coefficient algorithm of the learning process.Keywords:, LMS and RLS adaptive filter, the Matlab simulation课题简介:零均值、单位方差的白噪声通过一个二阶自回归模型产生的AR 过程。
微弱信号检测技术的原理及应用2018年1月一、微弱信号检测的基本原理、方法及技术在自然现象和规律的科学研究和工程实践中,经常会遇到需要检测诸如地震的波形和波速、材料分析时测定荧光光强、卫星信号的接收、红外探测以及生物电信号测量等。
这些测量量被强背景噪声或检测电路的噪声所淹没,无法用传统的测量方法检测出来。
微弱信号,为了检测被背景噪声淹没的微弱信号,人们进行了长期的研究工作,分析背景噪声产生的原因和规律,研究被测信号的特点、相关性以及噪声的统计特性,以寻找出从背景噪声中检测出目标信号的方法。
微弱信号检测技术的首要任务是提高信噪比,这就需要采用电子学、信息论和物理学的方法,以便从强噪声中检测出有用的微弱信号。
微弱信号检测技术不同于一般的检测技术,主要是考虑如何抑制噪声和提高信嗓比,因此可以说,微弱信号检测是一门专门抑制噪声的技术。
抑制噪声的现代信号处理手段的理论基础是概率论、数理统计和非线性科学。
1、经典检测与估计理论时期这一时期检测理论主要是建立在统计学家工作的基础上的。
美国科学家WienerN .将随机过程和数理统计的观点引入到通信和控制系统中,提出了信息传输和处理过程的统计本质,建立了最佳线性滤波理论,即维纳滤波理论。
NorthD.O.于1943年提出以输出最大信噪比为准则的匹配滤波器理论;1946年卡切尼科夫(BA.K)提出了错误判决概率为最小的理想接收机理论,证明了理想接收机应在其输出端重现出后验概率为最大的信号,即是将最大后验概率准则作为一个最佳准则。
1950年在仙农信息理论的基础上,WoodwardP.M.把信息量的概念用于雷达信号的检测中,提出了理想接收机应能从接收到的信号加噪声的混合波形中提取尽可能多的有用信息。
但要知道后验概率分布。
所以,理想接收机应该是一个计算后验概率分布的装里。
1953年以后,人们直接利用统计推断中的判决和统计理论来研究雷达信号检测和参盘估计。
密德尔顿(Middleton D)等用贝叶斯准则(最小风险准则)来处理最佳接收问题,并使各种最佳准则统一于风险理论。
卡尔曼,美国数学家和电气工程师。
1930年5月 19日生于匈牙利首都布达佩斯。
1953年在美国麻省理工学院毕业获理学士学位,1954年获理学硕士学位,1957年在哥伦比亚大学获科学博士学位。
1957~1958年在国际商业机器公司(IBM)研究大系统计算机控制的数学问题。
1958~1964年在巴尔的摩高级研究院研究控制和数学问题。
1964~1971年到斯坦福大学任教授。
1971年任佛罗里达大学数学系统理论研究中心主任,并兼任苏黎世的瑞士联邦高等工业学校教授。
1960年卡尔曼因提出著名的卡尔曼滤波器而闻名于世。
卡尔曼滤波器在随机序列估计、空间技术、工程系统辨识和经济系统建模等方面有许多重要应用。
1960年卡尔曼还提出能控性的概念。
能控性是控制系统的研究和实现的根本概念,在最优控制理论、稳定性理论和网络理论中起着重要作用。
卡尔曼还利用对偶原理导出能观测性概念,并在数学上证明了卡尔曼滤波理论与最优控制理论对偶。
为此获电气与电子工程师学会(IEEE)的最高奖──荣誉奖章。
卡尔曼著有《数学系统概论》(1968)等书。
什么是卡尔曼滤波最优线性滤波理论起源于40年代美国科学家Wiener和前苏联科学家Kолмогоров等人的研究工作,后人统称为维纳滤波理论。
从理论上说,维纳滤波的最大缺点是必须用到无限过去的数据,不适用于实时处理。
为了克制这一缺点,60年代Kalman把状态空间模型引入滤波理论,并导出了一套递推估计算法,后人称之为卡尔曼1 / 17滤波理论。
卡尔曼滤波是以最小均方误差为估计的最优准如此,来寻求一套递推估计的算法,其根本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
它适合于实时处理和计算机运算。
卡尔曼滤波的实质是由量测值重构系统的状态向量。
它以“预测—实测—修正〞的顺序递推,根据系统的量测值来消除随机干扰,再现系统的状态,或根据系统的量测值从被污染的系统中恢复系统的本来面目。