第二章线性系统的状态空间描述1
- 格式:doc
- 大小:915.50 KB
- 文档页数:19


第二章 线性系统的状态空间描述§2-1 状态空间的基本概念1、状态:系统的状态,是指系统的过去、现在和将来的状况。
(如:一个质点作直线运动,它的状态就是它每个时刻的位置和速度)2、状态变量:能完全表征系统运行状态的最小数目的一组变量。
(如果用最少的n 个变量x 1(t), x 2(t),……, x n (t)就能完全描述系统的状态,那么这n 个变量就是一组状态变量。
)3、状态向量:设一个系统有n 个状态变量,即x 1(t),x 2(t),……,x n (t),用这n 个状态变量作为分量构成的向量x(t)称为该系统的状态向量。
记为Tn t x t x t x t x )](,),(),([)(21 =4、状态空间:由n 个状态变量作为坐标轴所构成的n 维空间,称为状态空间。
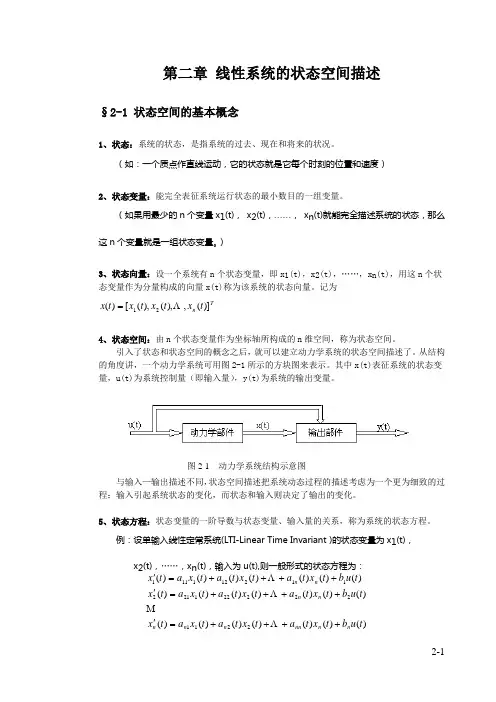
引入了状态和状态空间的概念之后,就可以建立动力学系统的状态空间描述了。
从结构的角度讲,一个动力学系统可用图2-1所示的方块图来表示。
其中x(t)表征系统的状态变量,u(t)为系统控制量(即输入量),y(t)为系统的输出变量。
与输入—输出描述不同,状态空间描述把系统动态过程的描述考虑为一个更为细致的过程:输入引起系统状态的变化,而状态和输入则决定了输出的变化。
5、状态方程:状态变量的一阶导数与状态变量、输入量的关系,称为系统的状态方程。
例:设单输入线性定常系统(LTI-Linear Time Invariant )的状态变量为x 1(t),x 2(t),……,x n (t),输入为u(t),则一般形式的状态方程为:)()()()()()()()()()()()()()()()()()()()()(2211222221212112121111t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x n n nn n n nn n n n ++++='++++='++++='图2-1 动力学系统结构示意图上式可写成向量—矩阵形式:其中:6、输出方程:在指定系统输出的情况下,该输出与状态变量、输入量之间的函数关系式,称为系统的输出方程。
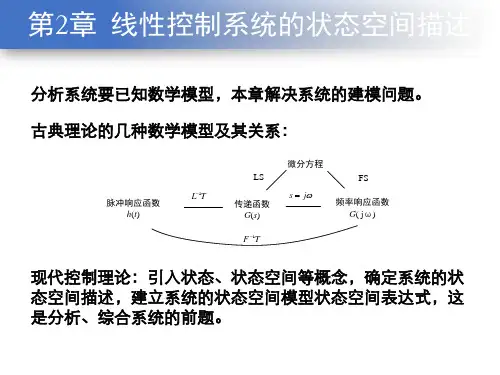
第二章 线性系统的状态空间描述§2-1 系统数学描述1、系统数学描述的两种基本类型系统是指由一些相互制约的部分构成的整体,它可能是一个反馈闭合的整体,也可能是某一控制装置或被控对象。
本章所研究的系统均假定具有若干的输入端和输出端,如图所示。
图中方块以外的部分为系统环境,环境对系统的作用为系统输入,系统对环境的作用为系统输出,二者分别用Tp u u u u ],,,[21 =和Tq y y y y ],,,[21 =表示,他们均为系统的外部变量。
描述系统内部每个时刻所处状况的变量为系统的内部变量,以向量Tn x x x x ],,,[21 =表示。
系统的数学描述是反映系统变量间因果关系和变换关系的一种数学模型。
系统的数学描述有两种基本类型:(1)外部描述:即输入—输出描述。
把系统看成一个“黑箱”,只是反映系统外部变量间即输入—输出间的因果关系。
(2)内部描述:即状态空间描述。
这种描述是基于系统内部结构分析的一类数学模型,通常由两个数学方程组成:一个是反映系统内部变量Tn x x x x ],,,[21 =及输入变量Tp u u u u ],,,[21 =之间因果关系的数学表达式,称为状态方程;另一个是表征系统内部变量Tn x x x x ],,,[21 =及输入变量T p u u u u ],,,[21 =和输出变量T q y y y y ],,,[21 =之间转换关系的数学表达式,具有代数方程的形式,称为输出方程。
外部描述只描述系统的外部特征,不能反映系统的内部结构特性,而具有完全不同内部结构的俩个系统也可能具有相同的外部特征,因而外部描述通常只是对系统的一种不完全的描述。
内部描述则是对系统的一种完全描述,它能完全表征系统的所有动力学特征。
仅当系统具有一定属性的条件下,两种描述才具有等价关系。
2、系统数学描述中常用的基本概念(1)输入和输出由外部施加到系统上的全部激励称为输入,能从外部量测到的来自相同的信息称为输出。
u 1u 2 u p 12 q(2)松弛性若系统的输出),[0∞t y 由输出),[0∞t u 唯一确定,则称系统在0t 时刻是松弛的。
从能量的观点看,系统在0t 时刻是松弛的意味着系统在0t 时刻不存储能量。
对于一个松弛系统,其输入——输出描述为:Hu y = (H 为某一算子)(3)因果性若系统在t 时刻的输出仅取决于在t 时刻和t 之前的输入,而与t 时刻之后的输入无关,则称系统具有因果性或因果关系。
本书所研究系统均具有因果性,并称为因果系统。
(4)线性若松弛系统具有可加性和齐次性(系统满足叠加原理),则该系统称为线性的。
(5)时不变性(定常性)一个松弛系统当且仅当对于任何输入u 和如何实数α均有y Q u HQ αα=其中,αQ 为位移算子。
u Q α表示对于所有t 均有 )(a t u u Q -=α§2-2 状态空间的基本概念1、状态:系统的状态,是指系统的过去、现在和将来的状况。
书中P441:系统在时间域中的行为或运动信息的集合。
(如:一个质点作直线运动,它的状态就是它每个时刻的位置和速度)2、状态变量:能完全表征系统运行状态的最小数目的一组变量。
(如果用最少的n 个变量x 1(t), x 2(t),……, x n (t)就能完全描述系统的状态,那么这n 个变量就是一组状态变量。
) 注意:状态变量的选取不具有唯一性,同一个系统可能有多种不同的状态变量选取方法。
状态变量也不一定在物理上可量测,有时只具有数学意义,而无任何物理意义。
但在工程实践中,应尽可能选取容易测量的量作为状态变量,以便实现状态的前馈和反馈等设计要求。
3、状态向量:设一个系统有n 个状态变量,即x 1(t),x 2(t),……,x n (t),用这n 个状态变量作为分量构成的向量x(t)称为该系统的状态向量。
记为T n t x t x t x t x )](,),(),([)(21 =4、状态空间:由n 个状态变量作为坐标轴所构成的n 维空间,称为状态空间。
状态轨线(状态轨迹):系统在任一时刻的状态,在状态空间中用一点来表示。
随着时间的推移,系统状态在变化,便在状态空间中描绘出一条轨迹。
即为状态轨线(状态轨迹)。
引入了状态和状态空间的概念之后,就可以建立动力学系统的状态空间描述了。
从结构的角度讲,一个动力学系统可用图2-1所示的方块图来表示。
其中x(t)表征系统的状态变量,u(t)为系统控制量(即输入量),y(t)为系统的输出变量。
与输入—输出描述不同,状态空间描述把系统动态过程的描述考虑为一个更为细致的过程:输入引起系统状态的变化,而状态和输入则决定了输出的变化。
5、状态方程:状态变量的一阶导数与状态变量、输入量的关系,称为系统的状态方程。
例:设单输入线性定常系统(LTI-Linear Time Invariant )的状态变量为x 1(t),x 2(t),……,x n (t),输入为u(t),则一般形式的状态方程为:上式可写成向量—矩阵形式:其中:6、输出方程:在指定系统输出的情况下,该输出与状态变量、输入量之间的函数关系式,称为系统的输出方程。
例:单输出线性定常系统)()()()()()()()()()()()()()()()()()()()()(2211222221212112121111t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x n n nn n n nn n n n ++++='++++='++++=')()()(t bu t Ax t x +='buAx x +='或⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡'''='n x x x x 21⎥⎥⎥⎤⎢⎢⎢⎢⎣⎡=x x x 21⎥⎥⎥⎦⎢⎢⎡=nn na a a a a A 222211211⎥⎥⎥⎥⎦⎢⎢⎢⎢⎣=n b b 2图2-1 动力学系统结构示意图)()()()()(2211t du t x c t x c t x c t y n n ++++= 其向量—矩阵形式为:)()()(t du t cx t y +=7、状态空间表达式:状态方程与输出方程的组合称为状态空间表达式,又称为动态方程。
它是对系统的一种完全的描述。
例:SISO 系统状态空间表达式:⎩⎨⎧+=+='ducx y bu Ax xMIMO 系统状态空间表达式:⎩⎨⎧+=+='Du Cx y BuAx x注意:由于A 、B 、C 、D 矩阵完整地表征了系统的动态特性,所以有时把一个确定的系统简称为系统),,,(D C B A 。
系统矩阵A :表示系统内部各状态变量之间的关联情况。
输入矩阵(或控制矩阵)B :表示输入对每个状态变量的作用情况。
输出矩阵C :表示输出与每个状态变量之间的组成关系。
前馈矩阵D :表示输入对输出的直接传递关系。
一般控制系统中,通常情况D=0。
8、状态空间分析法:在状态空间中以状态向量或状态变量描述系统的方法,称为状态空间分析法或状态变量法。
状态空间表达式:⎩⎨⎧+=+='Du Cx y BuAx x 的结构图如下:注意:每个方块的输入—输出关系规定为输出向量=(方块所示矩阵)⨯(输入向量)在向量和矩阵的乘法运算中,相乘的顺序不允许任意颠倒。
图2-2 系统动态方程的方块图结构§2-3 线性系统状态空间表达式的建立线性系统状态空间表达式的一般形式:连续系统:用线性微分方程来描述 ⎩⎨⎧+=+='Du Cx y BuAx x离散系统:用差分方程来描述⎩⎨⎧+=+=+)()()()()()1(k Du k Cx k Y k Hu k Gx k x一、状态空间表达式的模拟结构图在状态空间分析中,采用模拟计算机的模拟结构图来表示各状态变量之间的信息传递关系,这对于建立系统的状态空间表达式很有帮助。
状态空间表达式的模拟结构图有三种基本符号:(1)积分器(2)加法器(3)比例器【例2.3.1】已知系统动态方程如下,试画出系统结构图。
⎪⎩⎪⎨⎧+---='='='ux x x x x x x x 32133221236 21x x y += 解:写成向量—矩阵形式⎩⎨⎧=+='cxy bu Ax x其中:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=236100010A , ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=100b , []011=c 系统结构图(或状态变量图)如下:2二、状态空间表达式的的建立四种方法⎪⎪⎩⎪⎪⎨⎧、由传递函数建立、由微分方程建立定律建立、由实际系统通过物理立、由控制系统结构图建43211、 由控制系统的结构图求系统动态方程系统结构图是经典控制中常用的一种用来表示控制系统中各环节、各信号相互关系的图形化的模型,具有形象、直观的优点,常为人们采用。
要将系统结构图模型转化为状态空间表达式,一般可以由下列三个步骤组成:第一步:在系统结构图的基础上,将各环节通过等效变换分解,使得整个系统只有标准积分器(1/s )、比例器(k )及加法器组成,这三种基本器件通过串联、并联和反馈三种形式组成整个控制系统。
第二步:将上述调整过的结构图中的每个标准积分器(1/s )的输出作为一个独立的状态变量x i ,积分器的输入端就是状态变量的一阶导数dx i /dt 。
第三步:根据调整过的结构图中各信号的关系,可以写出每个状态变量的一阶微分方程,从而写出系统的状态方程。
根据需要指定输出变量,即可以从结构图写出系统的输出方程。
【例2.3.2】某控制系统的结构图如图2-3(a )所示,试求出其动态方程。
系统结构图(用基本单元来模拟动态方程)(a )解:该系统主要有一个一阶惯性环节和一个积分器组成。
对于一阶惯性环节,我们可以通过等效变换,转化为一个前向通道为一标准积分器的反馈系统。
图2-3(a )所示结构图经等效变换后如图2-3(b )所示。
我们取每个积分器的输出端信号为状态变量1x 和2x ,积分器的输入端即1x '和2x '。
从图可得系统状态方程:取y 为系统输出,输出方程为:写成矢量形式,我们得到系统动态方程:【例2.3.3】 求如图所示系统的动态方程。
(a )系统方块图图2-3 控制系统结构图(b )(b )第一次等效变换(c )由标准积分器组成的等效方块图解:图(a)第一个环节21++s s 可以分解为)211(+-s ,即分解为两个通道,如图(b)左侧点划线所框部分。
第三个环节为一个二阶振荡环节,它可以等效变换为如图(b)右侧双点划线所框部分。