3.3齐次变换矩阵的运算和给定的坐标系{A},{B}和{C},已知{B}相对{A}的 描述为 ,{C}相对{B}的描述为 ,则
从而定义复合变换
变换矩阵相乘不满足“交换律”
绝对变换:当坐标系C前乘(左乘)变换T时,TC得到的
是C始终相对于同一参考系的变换,变换的动作顺序
由T的最后(最右)因子开始,以最前(最左)的因子结 束其变换.
相对变换:当坐标系C后乘(右乘)变换T时,CT得到的 是C相对于不同当前坐标系的变换,变换的动作顺序
由T的最前(最左)因子开始,以最前(最右)的因子结
束其变换.
举例
3.3.2齐次变换矩阵求逆
如果知道坐标系{B}相对{A}的描述 ,希望 得到{ A}相对(B}的描述 ,这是个齐次变换 求逆问题.
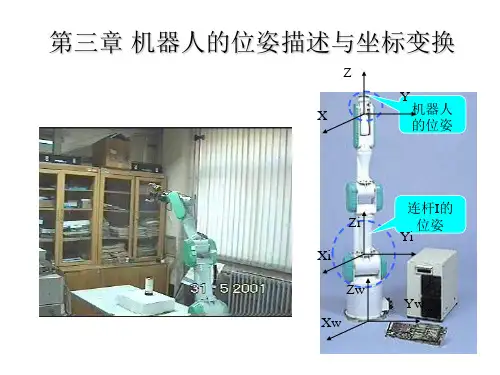
3.位姿描述和齐次变换
3.1刚体位姿描述和坐标变换
3.1.1位置的描述和坐标平移 1).位置的描述(位置矢量) 2).坐标平移
3.1.2姿态的描述和坐标旋转
1).姿态的描述(旋转矩阵) Pxyz=R· UVW P
由矢量分量的定义有
如果OUvw坐标系绕Ox轴转动α角,变换矩阵 Rx,α称为绕Ox轴旋转α角的旋转矩阵,即:
例:
并说明它所表示的运动(均指相对固定坐标 系而言)
3.3.3变换方程
{B}代表机座坐标系 (机座框), {W}代表腕框, {T}代表工具框, {S}代表工作站框, {G}代表目标框. 对物体进行操作时,工具框 {T}相对目标框{G}的位姿 直接影响操作效果
与其他变换(位姿)之 间的关系类似于空间尺 寸链, 则是封闭环 。

位姿描述与齐次变换PPT](https://uimg.taocdn.com/711ba841caaedd3383c4d3c4.webp)