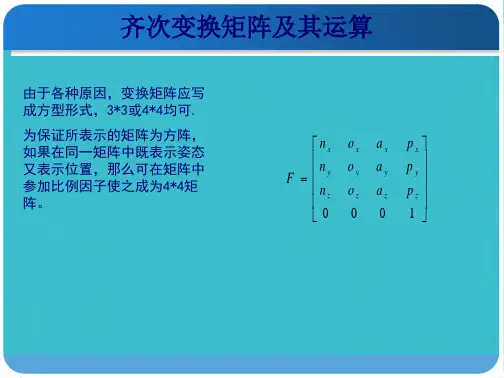
机器人运动分析中的矩阵变换(PPT52页)
- 格式:ppt
- 大小:1.39 MB
- 文档页数:52



机器人旋转变换矩阵和平移变换矩阵物理意义机器人旋转变换矩阵和平移变换矩阵的物理意义机器人旋转变换矩阵和平移变换矩阵是机器人控制中的重要概念,它们描述的是机器人在关节空间内的变换关系,是机器人形状变换的基础。
本文将从物理意义和数学推导这两个方面来详细阐述旋转变换矩阵和平移变换矩阵的意义。
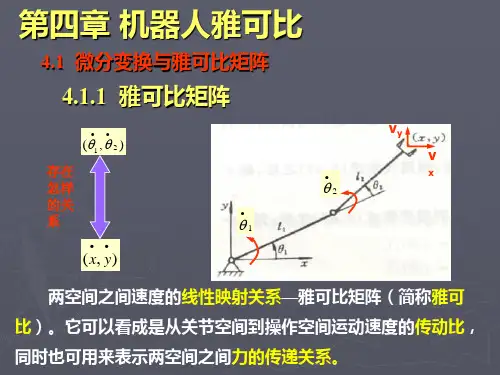
一、旋转变换矩阵的物理意义旋转变换矩阵是机器人运动学中的重要概念,它主要用于描述机器人各关节之间在关节空间内的相对旋转关系,并能有效地表示机器人关节的空间位置和姿态。
旋转变换矩阵是一个3×3矩阵,它可以用以下公式表示:R= [Ri] = [a1 a2 a3]其中Ri就是机器人每个关节之间的相对旋转矩阵,它表示关节之间绕着指定轴的旋转角度。
特别地,旋转变换矩阵还可以用来表示机器人关节的空间位置和姿态。
如果将3 x 3矩阵R视为一个向量,它便可以描述机器人末端的一个三维坐标系。
旋转变换矩阵由四个矩阵元素a,b,c和d构成,a,b和c分别表示x,y,z轴的旋转角度,而d为一个称为“偏转”的矩阵元素,被用来描述“坐标系间的偏移”,也表示机器人末端的空间位置。
旋转变换矩阵还可以用来表示机器人末端的姿态。
机器人末端有两种姿态,一种是末端朝向、即末端的三维空间位置和方向,另一种是机器人轴向、即机器人末端的转向角。
这两种姿态都可以用旋转变换矩阵来描述,a,b,c三个元素表示末端朝向,而d表示机器人轴向。
二、平移变换矩阵的物理意义平移变换矩阵也是机器人运动学中重要的概念,它用来描述机器人各关节之间在关节空间内的相对位移关系,有效能实现机器人从一个空间点移动到另一个空间点的轨迹设计。
同样,平移变换矩阵也是一个3×3矩阵,可以用以下公式表示:T= [Tj] = [q1 q2 q3]其中Tj为机器人每个关节之间的相对位移矩阵,它表示关节之间的位移距离。
特别地,平移变换矩阵可以用来描述机器人末端关节的位移关系,也可以用来表示机器人关节的空间位置和运动轨迹。
机器人旋转变换矩阵和平移变换矩阵物理意
义
机器人旋转变换矩阵和平移变换矩阵是用来描述机器人在三维空
间中运动的数学工具。
它们分别表示了机器人在空间中的旋转和平移。
旋转变换矩阵描述了机器人在空间中的旋转。
它包括了三个互相
垂直的轴,分别代表了机器人在三个维度上的旋转,即绕X、Y、Z轴
的旋转。
矩阵中每一行或列代表了机器人坐标系的一个轴,可以用来
描述机器人在空间中的姿态。
平移变换矩阵描述了机器人在空间中的平移。
它包括了机器人在X、Y、Z方向上的位移,即机器人在坐标系中的位置。
平移变换矩阵用一
个4x4的矩阵表示,其中前三行表示了三个轴方向的位移,而最后一
行则是一个固定的值(0,0,0,1),用来保证平移变换与旋转变换的连续性。
综上所述,机器人旋转变换矩阵和平移变换矩阵的物理意义是用
来描述机器人在三维空间中的运动。
旋转变换矩阵描述机器人的姿态,平移变换矩阵描述机器人的位置,两者结合使用可以完成机器人在空
间中的任意运动。
机器人运动学中变换矩阵左乘右乘的理解1. 引言在机器人运动学中,变换矩阵是一个核心概念,它用于描述机器人末端执行器相对于基座的位置和姿态。
而在进行变换矩阵的计算过程中,左乘和右乘往往是容易引起混淆的地方。
本文将深入探讨机器人运动学中变换矩阵左乘右乘的理解,帮助读者更加深入地理解这一重要概念。
2. 左乘和右乘的概念在机器人运动学中,一个坐标系相对于另一个坐标系的变换通常是通过一个4x4的变换矩阵来表示的。
假设我们有两个变换矩阵A和B,它们分别表示两个坐标系之间的变换关系。
当我们想要对某个向量或点进行这两个变换的组合时,就涉及到了左乘和右乘的操作。
•左乘:表示在原有变换的基础上进行相对位移或旋转。
即先进行左边的变换,再进行右边的变换。
•右乘:表示在原有变换的基础上进行绝对位移或旋转。
即先进行右边的变换,再进行左边的变换。
3. 左乘和右乘的比喻我们可以用日常生活中的例子来更好地理解左乘和右乘的概念。
想象一辆汽车在高速公路上行驶,这辆汽车可以进行前进和转向的操作。
•左乘:相当于在车身自身坐标系上进行操作,比如车辆自身转向或者车辆自身前进。
•右乘:相当于在世界坐标系上进行操作,比如在道路上的绝对位置调整或者全局导航的位移。
通过这个比喻,我们可以更清晰地理解左乘和右乘的区别,以及它们在机器人运动学中的应用。
4. 变换矩阵的左乘和右乘计算方法在机器人运动学中,变换矩阵的左乘和右乘的具体计算方法也是至关重要的。
在实际操作中,我们需要根据特定的场景和问题,选择合适的左乘和右乘的顺序,才能得到准确的结果。
假设有两个变换矩阵A和B,它们的表示如下: A = [[R1, p1], [0, 1 ]] B = [[R2, p2], [0, 1 ]]其中R表示旋转矩阵,p表示平移向量。
•左乘(A左乘B)的计算方法:先将A和B相乘,得到新的变换矩阵C,即C = A * B。
•右乘(B右乘A)的计算方法:先将B和A相乘,得到新的变换矩阵D,即D = B * A。
举例说明运用齐次变换矩阵求解机器人正运动学的方法齐次变换矩阵用于描述刚体在空间中的位姿(位置和方向)。
在机器人正运动学问题中,运用齐次变换矩阵可以求解机器人末端执行器的位姿。
我们以一个简单的2R(两个旋转关节)机械臂为例进行说明。
假设2R机械臂有两个关节q1和q2,臂长分别为L1和L2。
我们的目标是求解两个关节角度q1和q2下,末端执行器的位置坐标(x, y)和方向theta。
首先,我们需确定两个坐标系。
通常将基坐标系(frame0)放在第一个关节处,frame1放在第二个关节处,frame2放在末端执行器处。
然后,我们需要分别计算从frame0到frame1的齐次变换矩阵T01和从frame1到frame2的齐次变换矩阵T12。
T01表示frame1相对于frame0的位姿,其旋转角度为q1,平移距离为L1。
矩阵形式如下:```T01 = | cos(q1) -sin(q1) 0 L1*cos(q1) || sin(q1) cos(q1) 0 L1*sin(q1) || 0 0 1 0 || 0 0 0 1 |```同理,T12表示frame2相对于frame1的位姿,其旋转角度为q2,平移距离为L2。
矩阵形式如下:```T12 = | cos(q2) -sin(q2) 0 L2*cos(q2) || sin(q2) cos(q2) 0 L2*sin(q2) || 0 0 1 0 || 0 0 0 1 |```接下来,我们需要计算从frame0到frame2的齐次变换矩阵T02。
通过矩阵乘法,我们可以得到:```T02 = T01 * T12```最后,我们从T02矩阵中提取机器人末端执行器的位置和方向。
位置坐标(x, y)就是T02矩阵中的平移部分,即:```x = T02[0][3]y = T02[1][3]```方向theta可以通过以下公式计算:```theta = atan2(T02[1][0], T02[0][0])```所以,通过齐次变换矩阵,我们可以求解出机器人末端执行器的位置和方向,从而解决2R机械臂的正运动学问题。
举例说明运用齐次变换矩阵求解机器人正运动学的方法机器人正运动学是指根据机器人关节角度,求出机器人末端执行器的位置和姿态。
运用齐次变换矩阵的方法可以方便地求解机器人正运动学。
齐次变换矩阵是一种描述机器人移动和旋转的数学工具,它能够将机器人的位置和姿态用一个矩阵表示出来。
在机器人正运动学中,我们需要根据机器人各个关节的角度来求出机器人的位置和姿态。
假设机器人有n个关节,每个关节的旋转角度分别为θ1,θ2,...,θn。
我们可以用齐次变换矩阵来表示机器人每个关节的旋转和移动。
假设第i个关节的齐次变换矩阵为Ti,则Ti = [cosθi -sinθi 0 ai;sinθi cosθi 0 bi;0 0 1 ci;0 0 0 1];其中ai, bi, ci分别表示第i个关节的位置坐标,θi表示第i个关节的旋转角度。
机器人的末端执行器的位置和姿态可以通过将所有关节的齐次变换矩阵相乘得到。
即T0n = T1 * T2 * ... * Tn;其中T0n表示机器人的末端执行器的齐次变换矩阵。
通过分析T0n的各个元素,我们可以得到机器人末端执行器的位置和姿态信息。
举例说明,假设有一个二自由度机器人,其第一个关节的旋转角度为θ1,第二个关节的旋转角度为θ2。
假设机器人的关节长度均为1,且第二个关节相对于第一个关节的位置偏移为1。
则第一个关节的齐次变换矩阵为T1 = [cosθ1 -sinθ1 0 0;sinθ1 cosθ1 0 0;0 0 1 0;0 0 0 1];第二个关节相对于第一个关节的位置偏移为1,因此第二个关节的位置坐标为(1,0,0)。
其齐次变换矩阵为T2 = [cosθ2 -sinθ2 0 1;sinθ2 cosθ2 0 0;0 0 1 0;0 0 0 1];将两个齐次变换矩阵相乘得到机器人的末端执行器的齐次变换矩阵为T0n = T1 * T2= [cosθ1cosθ2-sinθ1sinθ2 -cosθ1sinθ2-sinθ1cosθ2 0 cosθ1;sinθ1cosθ2+cosθ1sinθ2 -sinθ1sinθ2+cosθ1cosθ2 0 sinθ1;0 0 1 0;0 0 01];通过分析T0n的各个元素,我们可以得到机器人末端执行器的位置和姿态信息。