方向控制回路讲解学习
- 格式:ppt
- 大小:2.25 MB
- 文档页数:14


方向控制回路工作原理一、引言方向控制回路是应用于自动控制系统中的一种重要控制回路,用于实现对某个系统或设备在空间中运动方向的控制。
本文将从基本原理、组成部分和工作过程等方面介绍方向控制回路的工作原理。
二、基本原理方向控制回路的基本原理是通过传感器获取系统当前位置信息,并与设定的目标位置进行比较,然后通过控制执行器实现系统运动方向的调整,使系统能够准确地到达目标位置。
三、组成部分方向控制回路主要由传感器、比较器、控制器和执行器等几个组成部分构成。
1. 传感器:传感器用于实时感知系统当前的位置信息,并将其转换为电信号输出。
常用的传感器包括光电传感器、编码器、陀螺仪等。
2. 比较器:比较器用于将传感器获取的位置信息与设定的目标位置进行比较,从而产生误差信号。
常见的比较器包括差分放大器、运算放大器等。
3. 控制器:控制器根据比较器输出的误差信号,经过处理和计算后产生控制信号,用于调整执行器以实现系统运动方向的控制。
常见的控制器有PID控制器、模糊控制器等。
4. 执行器:执行器接收控制器输出的控制信号,并根据信号调整系统的运动方向。
常见的执行器有电机、液压缸、伺服系统等。
四、工作过程方向控制回路的工作过程可以分为传感器采集、误差计算和控制信号输出三个阶段。
1. 传感器采集:传感器实时感知系统的位置信息,并将其转换为电信号输出,通常以模拟信号或数字信号的形式进行传输。
2. 误差计算:比较器将传感器输出的位置信息与设定的目标位置进行比较,计算出误差信号。
误差信号表示系统当前位置与目标位置之间的差距。
3. 控制信号输出:控制器根据误差信号进行处理和计算,产生相应的控制信号。
控制信号经过放大、滤波等处理后,输出给执行器,控制执行器调整系统的运动方向。
五、应用领域方向控制回路广泛应用于各个领域的自动控制系统中,如机器人导航、自动驾驶汽车、航空航天、工业自动化等。
通过方向控制回路的精确控制,可以实现系统在空间中的准确运动和定位。

《方向控制回路》文字稿同学们,大家好,第十一次课我们学习了《常见液压辅助元件》,其中我们学习了过滤器的作用和种类、蓄能器的符号和作用、油箱、油管、管接头的作用。
本节课分为四个部分,学习目标,知识精讲,总结提升,课后练习。
本节课要达到的学习目标是:1.能说出液压基本回路的定义和种类。
2.能说出方向控制回路的定义和种类。
3.能说出方向控制回路的工作过程。
液压传动系统由许多液压基本回路组成。
液压基本回路是指由某些液压元件和附件所构成并能完成某种特定功能的回路。
对于同一功能的基本回路,可有多种实现方法。
液压基本回路按功能可分为方向控制回路、压力控制回路、速度控制回路和顺序动作控制回路四大类。
熟悉这些基本回路,对分析整个液压传动系统,维护、修理及设计新的液压传动系统,都是十分重要的。
本节课主要介绍最基本最典型的几种回路。
我们先来学习方向控制回路,在液压系统中,控制执行元件的启动、停止(包括锁紧)及换向的回路称为方向控制回路。
方向控制回路有换向回路和锁紧回路。
我们先来学习换向回路,执行元件的换向,一般可采用各种换向阀来实现。
根据执行元件换向的要求不同,可以采用二位四通或五通、三位四通或五通等各种控制类型的换向阀进行换向。
电磁换向阀的换向回路应用最为广泛,尤其是在自动化程度要求较高的组合机床液压系统中广泛采用。
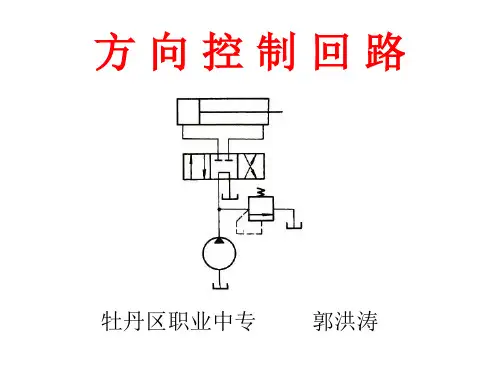
采用二位四通电磁换向阀实现双作用单杆缸的换向的回路如图所示,当电磁铁通电时,换向阀左位工作,压力油进入液压缸左腔,推动活塞杆向右移动;电磁铁断电时,换向阀右位工作,压力油进入液压缸右腔,推动活塞杆向左移动。
采用三位四通手动换向阀的换向回路,如图所示,它实现了双作用单杆缸的换向,当换向阀左位工作时,活塞杆伸出;当换向阀右位工作时,活塞杆缩回;当换向阀处于中位时,活塞被锁紧。
为了使执行元件能在任意位置停留以及在停止工作时防止在受力的情况下发生移动,可以采用锁紧回路,我们接下去来学习锁紧回路。
如图所示是采用O型中位机能三位四通电磁换向阀的锁紧回路,该换向阀采用电磁铁通电换向,弹簧复位。
第21讲方向控制回路一、换向回路二、顺序动作回路定义:各执行元件严格按预定顺序运动的回路称为顺序运动回路。
如:组合机床回转工作台的抬起和转位、定位夹紧机构的定位和夹紧、进给系统的先夹紧后进给等。
按照控制方式不同分类:行程控制,压力控制,顺序动作回路,时间控制1、用顺序阀控制的顺序动作回路压力控制:利用系统工作过程中压力的变化使执行元件按顺序先后动作。
按照采用压力阀的不同分类:顺序阀控制,压力继电器控制用顺序阀控制的顺序动作的回路组成(图7-21):工作原理:YA-,定位缸上行①,当系统压力升高到顺序阀的调定压力并大于定位缸前进的pmax时发出信号,使夹紧缸上行②YA+,液压油同时进入定位缸和夹紧缸上腔,俩缸同时下行。
特点:∵为保证严格动作顺序,防止顺序阀乱发信号∴ p先动缸max +(—)Mpa<p调<pY-(—)Mpa2、用压力继电器控制的顺序动作回路组成:动作顺序: A → 1 B → 2工作原理:1YA+,液压缸右行①,碰上挡铁后,系统压力升高,压力继电器发讯,使2YA+,液压缸左行②特点:∵为保证严格动作顺序,防止压力继电器乱发信号∴压力继电器的调定压力比液压缸的最高工作压力高,比溢流阀低。
3、用行程开关和电磁阀控制的顺序动作回路行程控制——利用执行元件运动到一定位置(或行程)时,使下一个执行元件开始运动控制方式组成:动作顺序:←③←④A →①B →②,使工作原理:1YA+,A缸右行完成顺序动作①,A缸右行至触动行程开关C1,使2YA+,B缸右行实现顺序动作②,B缸右行至触动行程开关C2,使1YA-,A缸左行实现顺序动作③,A缸左行至触动行程开关C3,完成下一个动作循环。
2YA-,B缸左行实现顺序动作④,最后触动行程开关C4特点:∵采用电磁换向阀换接,∴容易实现自动控制,安装位置不受限制,改变动作顺序比较灵活。
4、用行程换向阀(机动换向阀)控制的顺序动作回路组成:←③←④动作顺序: 1 →① 2 →②工作原理:图示,两缸皆在左位。