第四章 无约束优化方法
- 格式:ppt
- 大小:1.56 MB
- 文档页数:60
第四章
第四章
无约束优化问题标准形式:
无约束优化问题标准形式:
§
§
§
§
§
§
图最速下降法的收敛过程
αα
2
2
例4-1 求目标函数
取初始点
[2,2]
=
x
例4-2 求目标函数解取初始点[2,2]
=x
算出一维搜索最佳步长
§
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
例4-3 用梯度法求下面无约束优化问题:
梯度法的特点
x
给定0,ε
一般迭代式:
§4.3
§4.3
§4.3
§4.3
α0
d 0
x
x 1
x*
1
α1d 1
1()
f −∇x d 1
4-4 共轭方向法
假设目标函数f (x ) 在极值点附近的二次近似函数为
沿某个下降方向
如果能够选定这样的搜索方向,那么对于二
α
0d0
x0x1x*
1
α
1
d1
1
()
f
−∇x d
1。


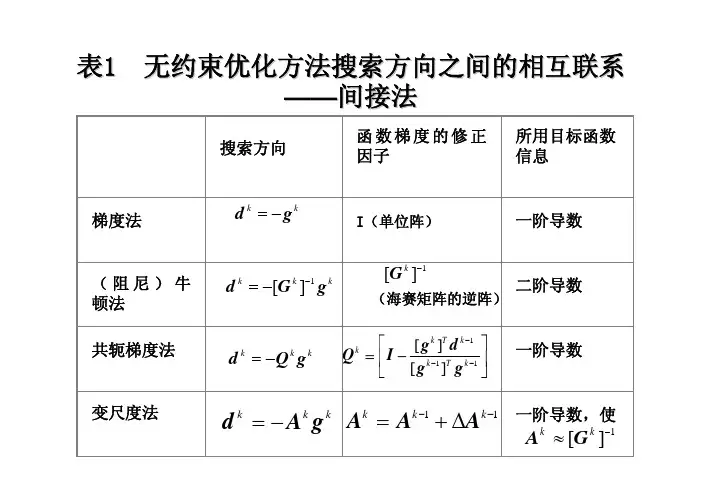
无约束优化方法
——间接法总结
1、梯度法
方向负梯度用到一阶导数
适合于精度不高或用于复杂函数寻找一个好的初始点2、牛顿法
用到一阶导数和海赛矩阵,具有二次收敛性
要求海赛矩阵非奇异,且维数不宜太高
3、共轭梯度法
用到一阶导数,具有二次收敛性
4、变尺度法
收敛快,效果好,被认为是目前最有效的无约束优化方法。
适用于维数较高,具有一阶偏导数的目标函数
无约束优化方法
——直接法总结
1、坐标轮换法
计算效率较低
适合维数较低,目标函数无导数或导数较难求得2、Powell法
具有二次收敛性,收敛速度较快,可靠性高,被认为是直接法中最有效的方法之一
无约束优化上机
Powell 法优化设计程序——
与一维搜索黄金分割法组合
题目:编程求解函数
的极小点x *。
2212
112
()242f x x x x x =+−−x 初始点x 0=[1,1]T ,迭代精度。
0.001ε=。
第四章 无约束优化方法——最速下降法,牛顿型方法概述在求解目标函数的极小值的过程中,若对设计变量的取值范围不加限制,则称这种最优化问题为无约束优化问题。
尽管对于机械的优化设计问题,多数是有约束的,无约束最优化方法仍然是最优化设计的基本组成部分。
因为约束最优化问题可以通过对约束条件的处理,转化为无约束最优化问题来求解。
为什么要研究无约束优化问题?(1)有些实际问题,其数学模型本身就是一个无约束优化问题。
(2)通过熟悉它的解法可以为研究约束优化问题打下良好的基础。
(3)约束优化问题的求解可以通过一系列无约束优化方法来达到。
所以无约束优化问题的解法是优化设计方法的基本组成部分,也是优化方法的基础。
根据构成搜索方向所使用的信息性质的不同,无约束优化方法可以分为两类。
一:间接法——要使用导数的无约束优化方法,如梯度法、(阻尼)牛顿法、变尺度法、共轭梯度法等。
二:直接法——只利用目标函数值的无约束优化问题,如坐标轮换法、鲍威尔法单纯形法等。
无约束优化问题的一般形式可描述为:求n 维设计变量 []12Tn n X x x x R =∈使目标函数 ()min f X ⇒目前已研究出很多种无约束优化方法,它们的主要不同点在于构造搜索方向上的差别。
无约束优化问题的求解: 1、解析法可以利用无约束优化问题的极值条件求得。
即将求目标函数的极值问题变成求方程0)(min *=X f的解。
也就是求X*使其满足解上述方程组,求得驻点后,再根据极值点所需满足的充分条件来判定是否为极小值点。
但上式是一个含有n个未知量,n个方程的方程组,在实际问题中一般是非线性的,很难用解析法求解,要用数值计算的方法。
由第二章的讲述我们知道,优化问题的一般解法是数值迭代的方法。
因此,与其用数值方法求解非线性方程组,还不如用数值迭代的方法直接求解无约束极值问题。
2、数值方法数值迭代法的基本思想是从一个初始点)0(X出发,按照一个可行的搜索方向)0(d搜索,确定最佳的步长0α使函数值沿)0(d 方向下降最大,得到)1(X 点。