常用无约束最优化方法(一)
- 格式:doc
- 大小:30.50 KB
- 文档页数:3
最优化方法解可新最优化问题是数学建模中一个重要的问题类别,它的主要目标是在给定一些约束条件下找到一个使得目标函数取得最大或最小值的最优解。
最优化方法是解决这类问题的一种有效手段,通过对问题进行数学建模和算法求解,可以得到最优解或近似最优解。
最优化问题可以分为无约束优化和有约束优化两类。
在无约束优化问题中,目标函数的优化不受约束条件的限制;而在有约束优化问题中,目标函数的优化需要满足一定的约束条件。
下面将分别介绍无约束优化和有约束优化的最优化方法。
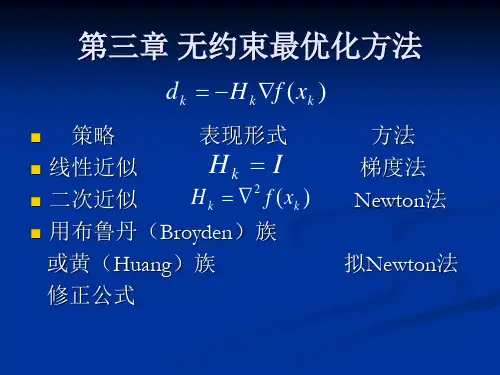
一、无约束优化的方法:1. 梯度下降法(Gradient Descent):梯度下降法是最为常用的无约束优化方法之一。
它通过迭代的方式不断地沿着目标函数梯度的反方向更新参数,直至达到收敛条件。
梯度下降法的核心思想是利用函数的导数信息进行搜索,从而找到函数的最小值点。
2. 牛顿法(Newton Method):牛顿法是一种基于函数局部二阶泰勒展开的优化方法。
它通过迭代的方式利用目标函数的一阶和二阶导数信息来求解最优解。
牛顿法在每次迭代时通过求解线性方程组来计算更新的步长,因此通常具有更快的收敛速度。
3. 拟牛顿法(Quasi-Newton Method):拟牛顿法是对牛顿法的改进,它通过估计目标函数的二阶导数信息来近似求解最优解。
拟牛顿法不需要计算目标函数的二阶导数,而是通过迭代更新一个代表二阶导数信息的矩阵。
拟牛顿法比牛顿法更加稳定和易于实现,因此被广泛应用于实际问题中。
二、有约束优化的方法:1. 线性规划(Linear Programming):线性规划是求解线性约束下的最优解的一种方法。
它的目标函数和约束条件均为线性函数,可以利用线性规划的特殊结构进行高效求解。
线性规划在工程、经济和管理等领域有广泛应用,如生产调度、资源分配等问题。
2. 非线性规划(Nonlinear Programming):非线性规划是求解非线性约束下的最优解的方法。
它的目标函数和/或约束条件为非线性函数,常常需要使用数值优化方法进行求解。
项目三 常用无约束最优化方法(一)
[实验目的]
编写最速下降法、Newton 法(修正Newton 法)的程序。
[实验学时]
2学时
[实验准备]
1.掌握最速下降法的思想及迭代步骤。
2.掌握Newton 法的思想及迭代步骤;
3.掌握修正Newton 法的思想及迭代步骤。
[实验内容及步骤]
编程解决以下问题:【选作一个】
1.用最速下降法求
22120min ()25[22]0.01T f X x x X ε=+==,,,.
2.用Newton 法求
22121212min ()60104f X x x x x x x =--++-,
初始点
0[00]0.01T X ε==,,.
最速下降法
Matlab 程序:
clc;clear;
syms x1 x2;
X=[x1,x2];
fx=X(1)^2+X(2)^2-4*X(1)-6*X(2)+17;
fxd1=[diff(fx,x1) diff(fx,x2)];
x=[2 3];
g=0;
e=0.0005;
a=1;
fan=subs(fxd1,[x1 x2],[x(1) x(2)]);
g=0;
for i=1:length(fan)
g=g+fan(i)^2;
end
g=sqrt(g);
step=0;
while g>e
step=step+1;
dk=-fan;
%点x(k)处的搜索步长
ak=((2*x(1)-4)*dk(1)+(2*x(2)-6)*dk(2))/(dk(1)*dk(2)-2*dk(1)^2-2*dk(2)^2);
xu=x+ak*dk;
x=xu;
%输出结果
optim_fx=subs(fx,[x1 x2],[x(1) x(2)]);
fprintf(' x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx);
%计算目标函数点x(k+1)处一阶导数值
fan=subs(fxd1,[x1 x2],[x(1) x(2)]);
g=0;
for i=1:length(fan)
g=g+fan(i)^2;
end
g=sqrt(g);
end
%输出结果
optim_fx=subs(fx,[x1 x2],[x(1) x(2)]);
fprintf('\n最速下降法\n结果:\n x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx); c++程序
#include<stdio.h>
#include<iostream.h>
#include<iomanip.h>
#include<math.h>
float goldena(float x[2],float p[2])
{float a;
a=-1*(x[0]*p[0]+4*x[1]*p[1])/(p[0]*p[0]+4*p[1]*p[1]);
return a;
}
void main()
{float a=0,x[2],p[2],g[2]={0,0},e=0.001,t;
int i=0;
x[0]=1.0;
x[1]=1.0;
p[0]=2*x[0];
p[1]=8*x[1];
g[0]=-p[0];
g[1]=-p[1];
printf("\n\n");
while(sqrt(g[0]*g[0]+g[1]*g[1])>e&&i<=100)
{
i=i+1;
a=goldena(x,g);
x[0]=x[0]+a*g[0];
x[1]=x[1]+a*g[1];
p[0]=2*x[0];
p[1]=8*x[1];
g[0]=-p[0];
g[1]=-p[1];
t=float(sqrt(g[0]*g[0]+g[1]*g[1]));
printf("第%d次t=%f x1=%f\tx2=%f\ta=%f\n",i,sqrt(g[0]*g[0]+g[1]*g[1]),x[0],x[1],a);
}
printf("\n最优解为:x1=%f,x2=%f\n最优值为y=%f\n",x[0],x[1],x[0]*x[0]+4*x[1]*x[1]); }。