数学实验作业题目(赛车跑道)
- 格式:doc
- 大小:1.16 MB
- 文档页数:16

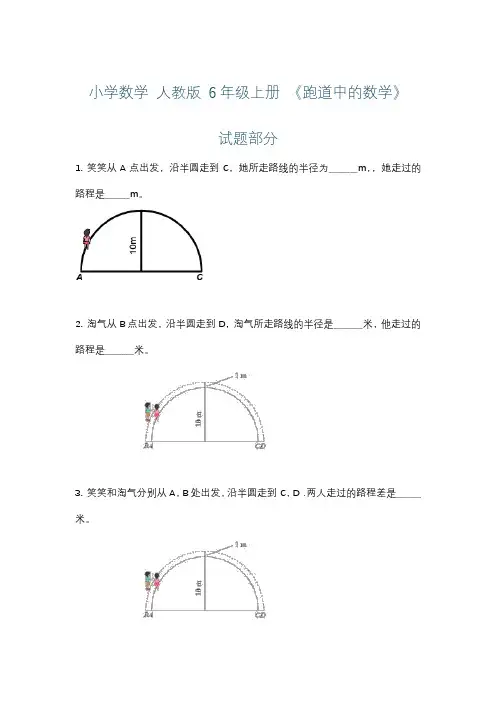
小学数学人教版6年级上册《跑道中的数学》试题部分1.笑笑从A点出发,沿半圆走到C,她所走路线的半径为_______m,,她走过的路程是______m。
2.淘气从B点出发,沿半圆走到D,淘气所走路线的半径是_______米,他走过的路程是_______米。
3.笑笑和淘气分别从A,B处出发,沿半圆走到C,D.两人走过的路程差是______米。
4.在400米的跑道中进行400米赛跑,道宽为1.5米,如果不考虑实跑线,那么起跑线该依次提前_____米。
(π取3.14。
)5.在400米的跑道中进行400米赛跑,道宽为1米,如果不考虑实跑线,那么起跑线该依次提前_______米。
(π取3.14。
)6.在400米的跑道中进行400米赛跑,道宽为1.2米,如果不考虑实跑线,那么起跑线该依次提前_______米。
(π取3.14。
)道长50米,每条跑道宽为1.25米.(结果保留一位小数,不考虑实跑线,π取3.14)淘气沿着第二道(由内向外数)跑了一圈,他跑了______米。
8.某小学有一个200米的环形跑道,它由两个直道和两个半圆形跑道组成,直道长50米,每条跑道宽为1.25米.(结果保留一位小数,不考虑实跑线,π取3.14)如果在这个跑道进行200米赛跑,那么第四道的起跑线与第一道相差_____米。
道长50米,每条跑道宽为1.25米.(结果保留一位小数,不考虑实跑线,π取3.14)如果在这个跑道上进行100米赛跑,相邻跑道的起跑线相差_____米。
小学数学人教版6年级上册《跑道中的数学》答案详解部分1.笑笑从A点出发,沿半圆走到C,她所走路线的半径为_______m,,她走过的路程是______m。
【答案】10、31.4【详解】笑笑走过了以10米为半径的周长的一半。
笑笑所走路线的半径为10米,她走过的路程是3.14×10=31.4(米).2.淘气从B点出发,沿半圆走到D,淘气所走路线的半径是_______米,他走过的路程是_______米。
跑道问题的数学问题公式
跑道问题涉及到数学中的几何和代数问题。
首先,我们可以从几何角度来考虑跑道问题。
假设一个标准田径场是一个长方形,我们可以使用矩形的周长和面积公式来计算跑道的长度和宽度。
假设矩形的长度为L,宽度为W,则周长为2(L+W),面积为LW。
这些公式可以帮助我们计算标准田径场的尺寸。
另外,如果要考虑椭圆形状的跑道,我们可以使用椭圆的周长和面积公式来计算。
椭圆的周长公式为2π√((a^2+b^2)/2),其中a和b分别是椭圆的长半轴和短半轴。
椭圆的面积公式为πab,其中a和b同样是椭圆的半轴长度。
此外,从代数角度来看,我们可以使用一元二次方程来解决跑道问题。
假设我们知道一个跑道的周长或面积,我们可以设定一个未知数作为长度或宽度,然后建立一个方程来解决这个问题。
总之,跑道问题涉及到数学中的几何和代数知识,可以从不同的角度使用相关公式来解决。
希望这些信息能够帮助你理解跑道问题的数学公式。
数学实验报告王伟晨材料22学号**********一.实验问题赛车道路路况分析问题先要在一旷野区域举行一场自行车比赛,问了了解环形道路的路况,现对一选手的比赛情况进行监测。
该选手从A 地出发向东到B 地,再经C,D 回到A 地(如图所示)。
现从选手出发开始计时,每隔15min 观测其位置,所得相应各点坐标如下表(假设其体力是均匀分配的)-50510152025303540051015202530354045假设:1车道几乎是在平地上,但有三种路况(根据平均速度v (km/h )大致区分) ;平整沙土路(v>30),坑洼碎石路(12<v<30),松软泥泞路(v<12); 2车道是一条连续的可用光滑曲线来近似表示的闭合路线; 3选手的速度是连续变化的。
求解:1模拟比赛车道的曲线和选手的速度曲线; 2估计车道的长度和所谓区域的面积;3分析车道上相关路段的路面状况(在车道上用不同的颜色标记出来); 4对参加比赛的选手提出合理化建议。
二 问题分析由给定的一系列x,y 坐标采用插值法,获得一条严格通过个数据点的曲线。
共有三种插值法;1多项式插值对于已知的n 个数据点),(),,(2211y x y x ;…;(n x ,n y ),可唯一的确定一条n-1次多项式y=o a +x a 1 +…+11--n n x a ,令,,,11111101101222111⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=-----n n n n n n n y y y y a a a x x x x x x x A 则所求的多项式系数为方程组Ax=y 的解。
故x=[]y A a a a a Tn 11,210,,,--= 利用命令y0=polyval(p,x0)可求得多项式函数任一点的函数值。
该种方法得到的曲线容易出现“龙格现象”,故一般不用该方法模拟曲线。
2分段线性插值在每一个子区间上利用一次多项式分段线性插值,几何图形上的表示为相邻两个数据点之间用直线相连。
幼儿园赛车跑道创意教案教案标题:探索创新:幼儿园赛车跑道实践活动教案目标:1. 帮助幼儿发展动手能力和创造性思维。
2. 培养幼儿的协作能力和解决问题的能力。
3. 提升幼儿的空间感知和运动技能。
教学重点:1. 学习如何制作赛车跑道。
2. 学习如何设计赛车跑道。
3. 学习如何协作与沟通。
教学准备:1. 赛车跑道制作材料:纸盒、颜料、彩纸、剪刀、胶水等。
2. 赛车模型:回收利用的塑料瓶、纸杯等。
3. 油画棒、丙烯颜料、画笔等。
教学步骤:引入活动:1. 引导幼儿们回顾一些他们认识的赛车比赛,并与他们讨论一些有关赛车跑道的问题,如形状、颜色、材料等。
制作赛车跑道:2. 将纸盒打开并将其展平,然后给予幼儿纸盒、颜料、彩纸、剪刀等制作材料。
3. 指导幼儿们使用剪刀和胶水将纸盒剪裁成适合赛车跑道的形状,并用颜料和彩纸装饰。
4. 鼓励幼儿们在赛车跑道上加入一些创意元素,例如花园、建筑物等,以增加趣味性。
设计赛车模型:5. 将回收利用的塑料瓶、纸杯等材料提供给幼儿们。
6. 引导幼儿们思考并设计自己的赛车模型,鼓励他们发挥想象力,尝试不同形状和结构的设计。
7. 提供油画棒、丙烯颜料和画笔等工具,鼓励幼儿们装饰和涂饰自己的赛车模型。
赛车跑道实践活动:8. 将制作好的赛车跑道和赛车模型摆放在教室或操场上。
9. 分成小组,让每个小组的幼儿轮流参与比赛。
每个小组的成员可以轮流当选手和裁判员。
10. 引导幼儿们探索赛车模型在不同赛车跑道上的运行规律,并鼓励他们尝试不同的方式和速度。
11. 鼓励幼儿们分享他们的观察和发现,以及对比赛过程的感受。
总结和评价:12. 结束赛车跑道实践活动后,组织小组讨论。
引导幼儿们回顾和总结他们的制作经验和实践过程中的问题与解决方法。
13. 鼓励幼儿们分享他们的赛车模型和赛车跑道设计,并互相欣赏与夸奖。
拓展活动:- 为幼儿提供其他赛车主题的游戏和学习资源,如绘画、语言游戏、赛车迷宫等,以进一步拓展他们的兴趣和知识。
fe赛车物理题目
1. 一辆赛车以40m/s的速度沿着一条圆形赛道行驶,赛道的半径为200m。
求赛车在圆弧上运动时所受的向心加速度。
解答:
向心加速度的公式为 a = v^2 / r,其中a为向心加速度,v为速度,r为半径。
代入已知数据,得到 a = (40m/s)^2 / 200m = 8m/s^2。
所以,赛车在圆弧上运动时所受的向心加速度为8m/s^2。
2. 静止的赛车质量为1000kg,引擎产生的推力为5000N,地面摩擦系数为0.3。
求赛车能够以多大的加速度起步。
解答:
赛车起步时,只有地面的摩擦力能够提供向前的推力。
摩擦力的大小为地面与赛车之间的摩擦系数乘以赛车的质量乘以重力加速度,即F = μ * m * g。
重力加速度的大小为9.8m/s^2。
代入已知数据,得到 F = 0.3 * 1000kg * 9.8m/s^2 = 2940N。
赛车能够以多大的加速度起步,即推力等于摩擦力,即 F = m * a。
代入已知数据,得到 5000N = 1000kg * a。
解方程,得到 a = 5m/s^2。
所以,赛车能够以5m/s^2的加速度起步。

赛车跑道中班科学教案引言:赛车跑道中班科学教案是为中班幼儿设计的一堂有趣的科学课。
通过赛车跑道这个具体的场景,引发幼儿对力和速度的探索和理解。
本教案将由一系列的活动和讨论组成,旨在激发幼儿的观察力、思考力和合作能力。
通过实践操作和问题解决,幼儿将能够自主认识和掌握赛车的运动规律,并理解力和速度之间的关系。
一、目标1. 学习目标:- 通过观察和实践,了解力和速度的概念;- 探索力和速度之间的关系;- 培养观察力、思考力和合作能力。
2. 情感目标:- 培养幼儿的好奇心和探索欲望;- 培养幼儿合作、分享和尊重他人的意识。
3. 教学重点:- 让幼儿通过实践感受力和速度的变化;- 引导幼儿注意观察、探索和思考。
4. 教学难点:- 帮助幼儿认识力和速度的关系;- 引导幼儿提出问题并解决问题。
二、教学准备材料准备:- 赛车模型或卡车玩具;- 直线赛道和弯曲赛道;- 计时器;- 绳子;- 记录表格。
三、教学步骤1. 导入(10分钟)在导入环节,教师向孩子们展示一辆玩具赛车模型或卡车玩具,并让孩子们观察它们的外形和质地。
教师:大家知道这是什么玩具吗?你们喜欢玩这种赛车吗?孩子:(回答)教师:对啊,这是一辆赛车,我们今天要探索一下赛车运动中有趣的事情。
请你们先和伙伴们一起观察这些赛车的样子。
2. 活动一:赛车速度的探究(15分钟)在这个活动中,教师会引导幼儿们思考赛车速度的变化和影响因素。
教师:我们来看一下这个直线赛道,假如我们把赛车放在这里,它会怎么样?幼儿:会往前跑。
教师:那我们来试一试。
请选两名幼儿帮忙,一个放赛车,一个用计时器计时。
然后我们记录下所用的时间。
幼儿:(执行活动)教师:好,我们看一下时间。
小车用了多少时间到达终点?为什么会有这个时间差呢?幼儿:(回答)教师:非常好的观察!大家觉得还有哪些因素可能会影响赛车的速度呢?幼儿:(回答)教师:很好,我们来试一试。
把一辆轻的玩具车和一辆重的玩具车放到同一个起点,看看它们用时是否相同?幼儿:(协助进行实验)教师:观察结果后,你们有什么发现?幼儿:(回答)教师:非常好的总结!我们通过实践发现赛车的速度受到重力的影响,轻的赛车跑得更快,而重的赛车跑得更慢。
跑道的内圈外圈数学题【中英文实用版】Title: The Math Problem of Runway Inner and Outer LanesProblem Statement:A airport runway consists of an inner circle and an outer circle.The inner circle has a radius of 100 meters, and the outer circle has a radius of 200 meters.Prove that there exists a point on the outer circle where the distance between this point and any point on the inner circle is always 100 meters.问题描述:一个机场跑道由内圈和外圈组成。
内圈的半径为100米,外圈的半径为200米。
证明在外圈上存在一个点,使得该点到内圈上任意一点的距离始终为100米。
Solution:To solve this problem, we can use the Pythagorean theorem.Let"s assume there exists a point P on the outer circle, and let"s assume Q is an arbitrary point on the inner circle.The distance between P and Q can be represented as the hypotenuse of a right triangle with legs equal to the radius of the outer circle (200 meters) and the radius of the inner circle (100 meters).根据勾股定理,我们可以解决这个问题。
数学实验报告王伟晨材料22学号**********一.实验问题赛车道路路况分析问题先要在一旷野区域举行一场自行车比赛,问了了解环形道路的路况,现对一选手的比赛情况进行监测。
该选手从A 地出发向东到B 地,再经C,D 回到A 地(如图所示)。
现从选手出发开始计时,每隔15min 观测其位置,所得相应各点坐标如下表(假设其体力是均匀分配的)-50510152025303540051015202530354045假设:1车道几乎是在平地上,但有三种路况(根据平均速度v (km/h )大致区分) ;平整沙土路(v>30),坑洼碎石路(12<v<30),松软泥泞路(v<12); 2车道是一条连续的可用光滑曲线来近似表示的闭合路线; 3选手的速度是连续变化的。
求解:1模拟比赛车道的曲线和选手的速度曲线; 2估计车道的长度和所谓区域的面积;3分析车道上相关路段的路面状况(在车道上用不同的颜色标记出来); 4对参加比赛的选手提出合理化建议。
二 问题分析由给定的一系列x,y 坐标采用插值法,获得一条严格通过个数据点的曲线。
共有三种插值法;1多项式插值对于已知的n 个数据点),(),,(2211y x y x ;…;(n x ,n y ),可唯一的确定一条n-1次多项式y=o a +x a 1 +…+11--n n x a ,令,,,11111101101222111⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=-----n n n n n n n y y y y a a a x x x x x x x A 则所求的多项式系数为方程组Ax=y 的解。
故x=[]y A a a a a Tn 11,210,,,--= 利用命令y0=polyval(p,x0)可求得多项式函数任一点的函数值。
该种方法得到的曲线容易出现“龙格现象”,故一般不用该方法模拟曲线。
2分段线性插值在每一个子区间上利用一次多项式分段线性插值,几何图形上的表示为相邻两个数据点之间用直线相连。
中班探索性性活动区:赛车跑道大探险
冠衡和博文分别选了自己喜欢的玩具车颜色,他们把车子放在起点,随着“三、二、一”的口号开始比赛谁的车子跑得快,比赛了两三回,冠衡便把玩具放回去,拿起其他
图1图2
1.幼儿准备方面。
帮助幼儿了解斜坡对人类生活的影响,知道不同的坡度会有产生不同的速度,鼓励幼儿尝试在不同的坡度上行走,丰富幼儿的生活经验。
2.材料投入方面。
经过思考之后,我将纸箱自制的赛车跑道换为由鞋盒和
合而成的跑道,增加跑道的数量,由原来的两个跑道增加到四个跑道,并且坡度上也做
图3图4
1.鼓励幼儿在自由活动时间围绕话题“汽车在哪里跑不快?”进行讨论交流,同时也请家长帮助幼儿一起在生活中观察汽车遇到什么路面的时候会变慢,不断丰富幼儿对不同坡面有不同速度的认识,进一步激发他们探索的欲望。
2.在材料投放方面,我增加了小碎石路坡面、鹅卵石坡面、瓦楞纸(凹凸不平)坡
图6。
六年级的跑道问题练习题某小学六年级同学正在进行田径运动的训练,其中包括跑道问题的练习。
跑道问题以其实际性和实用性深受同学们的喜爱和关注。
本练习题将为六年级的同学们提供一些跑道问题的练习,帮助他们熟悉和掌握跑道问题的解决方法。
练习1:小明和小红在同一个跑道上进行跑步训练。
小明一直以每秒6米的速度匀速前进,而小红一直以每秒4米的速度匀速前进。
如果两人同时从同一起点出发,那么在小明跑完500米后,小红跑了多少米?解答:小明一直以每秒6米的速度前进,所以在跑完500米后,他所用的时间为500 ÷ 6 = 83.33秒。
而小红以每秒4米的速度前进,所以在83.33秒内她跑的距离为83.33 × 4 = 333.33米。
因此,小红在小明跑完500米后,她跑了333.33米。
练习2:小刚和小李同时从同一起点出发,在同一个跑道上做冲刺比赛。
小刚以每秒8米的速度匀速前进,而小李以每秒10米的速度匀速前进。
如果小刚用时30秒赢得比赛,那么比赛结束时,两人之间的距离是多少米?解答:由于小刚以每秒8米的速度前进,所以在30秒内他跑的距离为30 × 8 = 240米。
同样地,小李以每秒10米的速度前进,所以在30秒内他跑的距离为30 × 10 = 300米。
比赛结束时,两人之间的距离为300 - 240 = 60米。
练习3:小华和小雷正在进行一场马拉松比赛,他们在同一个跑道上跑步。
小华一直以每秒7米的速度匀速前进,而小雷一直以每秒6米的速度匀速前进。
如果小华总共用时3小时完成比赛,那么比赛结束时,两人之间的距离是多少米?解答:一小时有3600秒,所以小华总共用时3 × 3600 = 10800秒。
由于小华以每秒7米的速度前进,所以在10800秒内他跑的距离为10800 × 7 = 75600米。
同样地,小雷以每秒6米的速度前进,所以在10800秒内他跑的距离为10800 × 6 = 64800米。
跑道里的数学
在一个标准的田径运动场上,跑道是由一个内部直径为400米的圆和两个半径为36.5米和40米的弯道组成的。
这个跑道是由八条白色的赛道组成的,每条赛道的宽度是1.22米。
如果你在这个跑道上跑一圈,你需要跑多少米呢?你需要走一个内部直径为400米的圆和两个半径为40米和36.5米的弯道。
这意味着你需要跑的总距离是400米+(40+36.5)×2×π米。
如果你是一位短跑运动员,你可能更关注每条赛道的长度。
根据田径联合会的规定,第一条赛道的长度是内部直径400米的起点处到第一个弯道的起点的距离,这个距离是84.39米。
剩下的七条赛道的长度可以通过在第一条赛道和相邻赛道之间画虚线来测量。
虚线的两端都与内部直径相交,这样每条赛道的长度都是相同的,是400米减去两倍虚线的长度。
现在你在跑道上练习了一段时间,想要测试一下自己的速度。
你可以使用一台计时器来记录一些跑步数据。
对于100米短跑,你要完成跑道上的一条赛道,大多数人需要10到15秒钟。
如果你在12秒内完成了100米短跑,那么你已经达到了高水平的表现。
除了短跑,跑道还用于长跑、跨栏、扔铅球、跳高和其他田径比赛。
因此,对于田径运动员来说,跑道是他们经常接触到并且需要了解的基本元素之一。
《跑道中的数学问题》教学设计1.指导思想与理论依据数学课程标准指出:学生应当有足够的时间和空间经历观察、实验、猜测、计算、推理、验证等活动过程。
教师要引导学生独立思考、主动探索、合作交流,使学生理解和掌握基本的数学知识和技能,体会和运用数学思想与方法,获得基本的数学活动经验。
所以在这节课上,我让学生经历有目的、有设计、有步骤、有合作的时间活动。
通过应用和反思了解所学知识之间的联系,获得数学活动经验。
2.教学背景分析学习内容分析:跑道中的数学问题是北京版数学教材六年级上册的第78—79页部分,属于综合与实践活动,目的在于发展学生综合运用数学知识方法解决简单实际问题的能力,感受数学在日常生活中的作用。
学生情况分析:“跑道中的数学问题”是在学生掌握了圆的认识、圆的周长等知识的基础上进行学习的。
内容涉及组合图形、数据计算、方法推导等知识和技能,对于已经有了之前基础的六年级学生来说,引导学生发现问题时关键。
因为学生已经具有了一定的分析、推理和计算能力。
教学方式与教学手段说明:因为是综合实践内容的教学,所以在课堂上教学方式我选用以谈话法发现问题、讨论法提出问题、实验法解决问题的方式。
教学手段是用多媒体课件、书面练习呈现内容,学生以合作探究的方式完成任务获得知识,形成技能。
前期准备:(1)技术准备:拍摄照片、测量数据、制作多媒体课件。
(2)知识准备:确保学生已经掌握圆的认识、圆的周长、圆的面积、组合图形的相关知识。
因为解题步骤多,计算繁琐,所以要求学生能熟练使用计算器。
3.教学目标与重点、难点设计教学目标:(1).以操场中的实际问题为载体,让学生经历发现问题、提出问题的过程,沟通数学与体育领域的联系,培养学生用数学的眼光观察生活的敏锐视角。
(2).让学生经历从操场中的实际问题抽取数学问题,进一步通过设计、测量、等手段分析问题、解决问题,了解200米跑道的结构,确定起跑线前伸数的确定方法。
(3).在解决问题的过程中提升学生综合运用数学知识解决实际文题的能力,拓宽学生的知识领域,培养学生自主解决问题的能力、实践探究能力、合作能力、搜集信息能力、整体提升学生的数学素养。
六年级跑道求周长练习题跑道是许多学校和运动场所常见的设施之一,它为学生和运动员提供了进行跑步和锻炼的场所。
在六年级数学课程中,求解跑道周长是一个常见的练习题。
通过这篇文章,我们将一起来解决几个有关六年级跑道求周长的练习题。
练习题一:某校操场修建一个矩形跑道,长60米,宽25米。
请问这条跑道的周长是多少?解答:首先,我们需要知道矩形的周长公式,即周长=2 × (长 + 宽)。
根据题目给出的数据,长为60米,宽为25米,代入公式即可计算得出结果。
周长 = 2 × (60 + 25) = 2 × 85 = 170(米)练习题二:某校操场内修建一个环形跑道,内径为40米,外径为60米。
请问这条跑道的周长是多少?解答:环形的周长公式是π × (内径 + 外径)。
题目给出的内径为40米,外径为60米,代入公式可以计算得出结果。
这里使用π的近似值为3.14。
周长= π × (40 + 60) = 3.14 × 100 = 314(米)练习题三:某校操场内修建一个等边三角形跑道,每边长为50米。
请问这条跑道的周长是多少?解答:等边三角形的周长公式是3 ×边长。
题目给出每边长为50米,代入公式即可计算得出结果。
周长 = 3 × 50 = 150(米)练习题四:某校操场内修建一个梯形跑道,长底为50米,短底为30米,高为20米。
请问这条跑道的周长是多少?解答:梯形的周长公式是长底 + 短底 + 2 ×高。
根据题目给出的数据,长底为50米,短底为30米,高为20米,代入公式即可计算得出结果。
周长 = 50 + 30 + 2 × 20 = 50 + 30 + 40 = 120(米)练习题五:某校操场内修建一个菱形跑道,对角线1长为50米,对角线2长为30米。
请问这条跑道的周长是多少?解答:菱形的周长公式是4 × (对角线1 + 对角线2)。
跑道问题六年级练习题
跑道问题是数学课程中的经典题型之一,它能锻炼学生的逻辑思维和解决实际问题的能力。
本文将为您介绍一道跑道问题的六年级练习题,并以合适的格式来书写。
题目描述:
小明和小红在一条环形跑道上开始比赛,小明每分钟可以跑2圈,小红每分钟可以跑3圈。
他们同时起跑,那么他们什么时候能再次相遇?相遇后他们各自跑了多少圈?
解题思路:
1. 首先,我们需要找到小明和小红跑完一圈所需的时间。
小明每分钟跑2圈,因此他每跑完一圈需要的时间为1/2分钟。
同样地,小红每分钟跑3圈,所需时间为1/3分钟。
2. 然后,我们可以观察两个时间值的公倍数。
由于小明和小红同时起跑,他们再次相遇的时间必然是两者时间的最小公倍数。
3. 计算最小公倍数:小明的时间为1/2分钟,小红的时间为1/3分钟,它们的最小公倍数是1分钟。
4. 因此,小明和小红在1分钟后会再次相遇,且此时他们各自都跑了1圈。
解题过程:
根据上述解题思路,小明和小红在1分钟后将再次相遇,且各自跑
了1圈。
结论:
小明和小红将在1分钟后再次相遇,此时他们各自跑了1圈。
本题解决了小明和小红在环形跑道上相遇的问题,通过计算最小公
倍数,我们可以得出他们相遇的时间和跑了的圈数。
这道题目不仅考
察了学生的逻辑思维和计算能力,还培养了他们解决实际问题的能力。
希望通过这样的练习,学生们能更好地理解跑道问题,并且在日常生
活中能够灵活应用相关的数学知识。
数学实验报告实验题目:赛车车道路况分析问题小组成员:填写日期2012 年 4 月20 日一.问题概述赛车道路况分析问题现要举行一场山地自行车赛,为了了解环行赛道的路况,现对一选手比赛情况进行监测,该选手从A地出发向东到B,再经C、D回到A地(如下图)。
现从选手出发开始计时,每隔15min观测其位置,所得相应各点坐标如下表(假设其体力是均衡分配的):由D→C→B各点的位置坐标(单位:km)假设:1. 车道几乎是在平原上,但有三种路况(根据平均速度v(km/h)大致区分):平整沙土路(v>30)、坑洼碎石路(10<v<30)、松软泥泞路(v<10);2. 车道是一条连续的可以用光滑曲线来近似的闭合路线;3.选手的速度是连续变化的.求解:1. 模拟比赛车道曲线和选手速度曲线;2.估计车道的长度和所围区域的面积;3.分析车道上相关路段的路面状况(用不同颜色或不同线型标记出来);4.对参加比赛选手提出合理建议.二.问题分析1.模拟比赛车道的曲线:因为赛道散点分布不规则,我们需要用光滑曲线来近似模拟赛道。
由于数据点较多,为了避免龙格现象,应采用三次样条插值法来对曲线进行模拟(spline命令)。
全程曲线为环路,我们需要对上下两部分分别模拟,设模拟出的曲线为P:。
2.把A到B点的曲线分成若干小段:赛道的路程L:取dL=,对模拟出的整条曲线求线积分,即所围区域的面积:用上下部分曲线的差值对求定积分,即3.用样条插值法模拟出比赛车道曲线后,根据曲线分别计算出原数据中每两点()间的路程,即求线积分由于每两点间时间间隔相同且已知(15min),故可求出每段路程的平均速度易知即为的积分中值将此速度近似作为两点间中点时刻的速度,然后再次采用样条插值法,模拟出全过程的图像。
而根据求出的与之间的关系,再次采用样条插值法,即可模拟出全过程的图像4. 由赛道曲线可求出赛道上任一点到点的路程同时图像也可以求出赛道上任一点到点的路程因此,我们可以通过来将曲线建立联系,得到一个新的函数。
从而对赛道曲线上任一点都有一个与之对应,根据已知路况:平整沙土路()、坑洼碎石路()、松软泥泞路(),我们便可得知点处的路况,进而对整个赛道进行标记颜色。
三.建立模型求解:1.赛道拟合及长度和面积的求解:数据点已知,根据MATLAB中的spline函数模拟比赛车道的曲线P: :。
图1:赛道拟合曲线求得:S=733.08 , L=175.90。
由图像可以看出,曲线的上下两部分交接除不光滑,这不是我们希望得到的结果。
因为曲线本身只是一种模拟,我们不妨在赛道上建立几个虚拟点对曲线进行优化。
在点和B点附近,我们加上几个虚拟点,这两点附近的几个原始点与这几个虚拟点满足一个二阶导数连续的曲线方程,再利用spline命令对整条曲线进行模拟,就可以发现曲线在交接处变得光滑了。
图2:优化过的赛道拟合曲线(蓝色点为虚拟点)求得:S=739.24 , L=174.12。
2.速度-时间曲线的求解:根据曲线计算原数据中每两点间的路程。
因为所以有将MATLAB求出的123456785.9038 1.7057 3.3283 4.8179 5.6478 2.7528 4.8655 5.54699101112131415163.9853 1.9534 1.0139 3.1977 1.3278 1.2829 1.5078 1.426217181920212223240.9698 6.1892 4.4495 3.1377 4.2824 2.5103 1.8058 3.374825262728293031324.41545.2078 5.6441 5.02056.985710.373711.8446 5.150333343536374.88867.764610.42595.986113.4251123456780.1250.3750.6250.875 1.125 1.375 1.625 1.87523.6151 6.823013.313119.271722.591311.011319.461822.18769101112131415162.125 2.375 2.625 2.8753.125 3.375 3.625 3.87515.94127.8135 4.055412.7908 5.3114 5.1314 6.0314 5.704917181920212223244.125 4.375 4.625 4.8755.125 5.375 5.625 5.8753.879324.756817.797912.550917.129810.04137.223313.499025262728293031326.125 6.375 6.625 6.8757.1257.3757.6257.87517.661520.831222.576320.082127.942841.494747.378520.601133343536378.1258.3758.6258.8759.12519.554631.058441.703523.944453.7005表2 :的计算值然后用样条插值法,模拟出全过程的图像(由于两端速度无法求出,所以我们假定v(0)=0,v(末端)=66:图3:v-t图像黑色点表示原始数据点对应的函数点,红色点为每段的中点时刻时的函数点。
紫红色线下部区域:;绿色线上部区域:;两线之间区域:。
3.路程-时间曲线的求解:由上一部分我们已知路程与时间的关系,再次使用样条插值法即可得到全过程的s-t 曲线S:图4:s-t图像4.现在可以根据已知情况(赛道拟合曲线和v-t图像)和路况(平整沙土路()、坑洼碎石路()、松软泥泞路()对整个赛道进行标记颜色:图4:标记过的赛道曲线黑色区域,紫红色区域,绿色区域四.合理建议:1.由v-t图像可知,选手在前一段路程中平均速度较慢,而在最后一小段路程中速度达极大。
从总体来看,这种速度分配方式不利于选手快速到达终点,选手应在前面大部分路程中将速度尽量维持在一个较为合适的范围内,在最后一段再进行一下冲刺,才能取得较好成绩。
2.由v-t图像和标记过的赛道曲线可知,路况对于选手的速度影响很大,而在赛道上坑洼碎石路和平整沙土路占的比例又较大,故选手的成绩与正常水平相比会下降很多。
因此,选手平时训练时可适当增强坑洼碎石路、平整沙土路上的训练,争取适应这两种路况,这样在比赛中即可在大块区域上领先,进而增大获胜的概率。
3.从赛道形状来看,整个赛道中唯一一段较直的路段是一段平整沙土路,选手应以最大速度穿过此路段,抓住比赛的主动权。
该选手没有以最佳状态通过此路段,从体力和时间的角度讲,这是不合算的。
合理的跑法应为:当经过平整沙土路时,尽量增大速度,一方面在该路段节省时间,另一方面为经过较坑洼的路面时节省体力;在经过坑洼碎石路时,尽量维持恒定速度;在经过松软泥泞路时,因为松软泥泞路路程较短,应在最后加速来获得较大速度冲出该路段。
五.总结与讨论:此次实验的题目看上去十分简单,当开始做的时候就感到十分棘手,一连做了好长时间才最终完成,期间数次和其他同学进行过讨论,甚至曾去向认识的学长学姐求教,才终于勉强将所有问题解决,尤其是速度-时间曲线和对路况的分析几处,着实花费了我们好多时间和精力,虽然程序中还有一些问题,但还好不影响结果的得出,也可以算是我们投机取巧了吧。
通过这次实验作业,我们深刻认识到自己在这方面还有很大的欠缺,说句难听的我们也只能算是略懂皮毛而已,需要学习的还有很多。
不过这次我们也有很大的收获,最大的收获应该算是这次真的勾起了我们对数学建模的兴趣。
虽然这个学期已经没有数学实验课了,但我们仍然会找一些题尝试去做的,而且下个学期如果有时间我想我们或许真的会去参加数学建模大赛的。
六.MATLAB代码:1.赛道拟合曲线:clc;clf;x1=[0.2,4.96,6.55,9.71,13.17,16.23,18.36,20.53,23.15,26.49,28.23,29.1,30.65,30.92,31.67,33.03,34.35,35.01,3 7.5];x2=[0.2,1.8,4.90,6.51,9.73,13.18,16.20,18.92,20.50,23.23,25.56,28.31,29.45,30.00,30.92,31.67,33.31,34.23,35. 81,37.5];y1=[6.66,5.28,4.68,5.19, 2.34 , 6.94,5.55 ,9.86,5.28,3.87,3.04,2.88,3.68, 2.38, 2.06,2.58, 2.16,1.45,6];y2=[6.66,19.89,24.52,34.82,40.54,37.67,41.38,30.00,19.68,14.56,18.86,18.55,22.66,18.28,15.06,13.42,11.86,7.68,9.45,6];plot(x1,y1,'k.',x2,y2,'k.','markersize',32);axis([-5 40 0 45]);f1=spline(x1,y1,t1);f2=spline(x2,y2,t1);hold onplot(t1,f1,'r-','linewidth',4)plot(t1,f2,'r-','linewidth',4)title('赛道拟合曲线');xlabel('x/km');ylabel('y/km');%拟合曲线t1=0.2:0.01:37.5;%把曲线分成若干小段S1=trapz(t1,f1);S2=trapz(t1,f2);dx=diff(t1);dy1=diff(f1);dy2=diff(f2);L1=sqrt(dx.^2+dy1.^2);L1=sum(L1);L2=sqrt(dx.^2+dy2.^2);L2=sum(L2);fprintf('S=%.2f , L=%.2f\n',S2-S1,L1+L2)%S、L2.赛道拟合曲线(加点):clc;clear;epsX=0.01;epsT=0.01;%下半部分原始点x1=[0.2,4.96,6.55,9.71,13.17,16.23,18.36,20.53,23.15,26.49,28.23,29.1,30.65,30.92,31.67,33.03,34.35,35.01,3 7.5];y1=[6.66,5.28,4.68,5.19, 2.34 , 6.94,5.55 ,9.86,5.28,3.87,3.04,2.88,3.68, 2.38, 2.06,2.58, 2.16,1.45,6];%下半部分虚拟点xa1=[0.2,0.5,1.5,3.0,4.96,6.55,9.71,13.17,16.23,18.36,20.53,23.15,26.49,28.23,29.1,30.65,30.92,31.67,33.03,3 4.35,35.01,37,37.4,37.5];ya1=[6.66,5.7,4.9,5.0,5.28,4.68,5.19,2.34,6.94,5.55 ,9.86,5.28,3.87,3.04,2.88,3.68,2.38,2.06,2.58,2.16,1.45,3,5, 6];%上半部分原始点x2=[0.2,1.8,4.90,6.51,9.73,13.18,16.20,18.92,20.50,23.23,25.56,28.31,29.45,30.00,30.92,31.67,33.31,34.23,35. 81,37.5];y2=[6.66,19.89,24.52,34.82,40.54,37.67,41.38,30.00,19.68,14.56,18.86,18.55,22.66,18.28,15.06,13.42,11.86,7.68,9.45,6];%上半部分虚拟点xa2=[0.2,0.4,1.8,4.90,6.51,9.73,13.18,16.20,18.92,20.50,23.23,25.56,28.31,29.45,30.00,30.92,31.67,33.31,34.2 3,35.81,36.8,37.4,37.5];ya2=[6.66,10.5,19.89,24.52,34.82,40.54,37.67,41.38,30.00,19.68,14.56,18.86,18.55,22.66,18.28,15.06,13.42,1 1.86,7.68,9.45,9.1,7,6];hold on;plot(xa1,ya1,'b.','markersize',15)plot(xa2,ya2,'b.','markersize',15)plot(x1,y1,'k.','markersize',15)plot(x2,y2,'k.','markersize',15)axis([-5 40 0 45]);tx1=xa1(1):epsX:xa1(numel(xa1));tx2=xa2(1):epsX:xa2(numel(xa2));f1=spline(xa1,ya1,tx1);f2=spline(xa2,ya2,tx2);plot(t1,f1,'r-','linewidth',2)plot(t2,f2,'r-','linewidth',2)title('赛道拟合曲线');xlabel('x/km');ylabel('y/km'); %拟合曲线k1=0.2:0.01:37.5; %把曲线分成若干小段S1=trapz(k1,f1);S2=trapz(k1,f2);dx=diff(k1);dy1=diff(f1);dy2=diff(f2);L1=sqrt(dx.^2+dy1.^2);L1=sum(L1);L2=sqrt(dx.^2+dy2.^2);L2=sum(L2);fprintf('S=%.2f , L=%.2f\n',S2-S1,L1+L2) %求S、L3.v-t曲线:clc;clear;epsX=0.01;epsT=0.01;%下半部分原始点x1=[0.2,4.96,6.55,9.71,13.17,16.23,18.36,20.53,23.15,26.49,28.23,29.1,30.65,30.92,31.67,33.03,34.35,35.01,3 7.5];y1=[6.66,5.28,4.68,5.19, 2.34 , 6.94,5.55 ,9.86,5.28,3.87,3.04,2.88,3.68, 2.38, 2.06,2.58, 2.16,1.45,6];%下半部分虚拟点xa1=[0.2,0.5,1.5,3.0,4.96,6.55,9.71,13.17,16.23,18.36,20.53,23.15,26.49,28.23,29.1,30.65,30.92,31.67,33.03,3 4.35,35.01,37,37.4,37.5];ya1=[6.66,5.7,4.9,5.0,5.28,4.68,5.19,2.34,6.94,5.55 ,9.86,5.28,3.87,3.04,2.88,3.68,2.38,2.06,2.58,2.16,1.45,3,5, 6];%上半部分原始点x2=[0.2,1.8,4.90,6.51,9.73,13.18,16.20,18.92,20.50,23.23,25.56,28.31,29.45,30.00,30.92,31.67,33.31,34.23,35. 81,37.5];y2=[6.66,19.89,24.52,34.82,40.54,37.67,41.38,30.00,19.68,14.56,18.86,18.55,22.66,18.28,15.06,13.42,11.86,7.68,9.45,6];%上半部分虚拟点xa2=[0.2,0.4,1.8,4.90,6.51,9.73,13.18,16.20,18.92,20.50,23.23,25.56,28.31,29.45,30.00,30.92,31.67,33.31,34.2 3,35.81,36.8,37.4,37.5];ya2=[6.66,10.5,19.89,24.52,34.82,40.54,37.67,41.38,30.00,19.68,14.56,18.86,18.55,22.66,18.28,15.06,13.42,1 1.86,7.68,9.45,9.1,7,6];tx1=xa1(1):epsX:xa1(numel(xa1));tx2=xa2(1):epsX:xa2(numel(xa2));f1=spline(xa1,ya1,tx1);f2=spline(xa2,ya2,tx2);Ds1=[];Ds2=[];s1=[0];s2=[0];dS1=sqrt(diff(tx1).^2+diff(f1).^2);dS2=sqrt(diff(tx2).^2+diff(f2).^2);k=0;k1=0;ii=2;for i=tx1if(i>=x1(ii))k2=k;ii=ii+1;DdS1=dS1(k1+1:k2);Ds1=[Ds1 sum(DdS1)];k1=k2;endif k>0s1=[s1 dS1(k)+s1(k)];endk=k+1;endk=0;k1=0;ii=2;for i=tx2if(i>=x2(ii))k2=k;ii=ii+1;DdS2=dS2(k1+1:k2);Ds2=[Ds2 sum(DdS2)];k1=k2;endif k>0s2=[s2 dS2(k)+s2(k)];endk=k+1;endL1=sum(Ds1);L2=sum(Ds2);DsABCD=[Ds1 Ds2(numel(x2)-1:-1:1)];sABCD=[s1(1:numel(tx1)-1) s2+L1];vMax=66; %设速度的最大值vABCD=DsABCD*4; %·分段速度tABCD=0.125:0.25:0.125+(numel(x1)+numel(x2)-3)*0.25; ttABCD=0:epsT:(numel(x1)+numel(x2)-2)*0.25;fvABCD=spline(tABCD,vABCD,ttABCD); %?速度拟合vABCD=[0 vABCD vMax];tABCD=[0 tABCD (numel(x1)+numel(x2)-2)*0.25];fvABCD=spline(tABCD,vABCD,ttABCD);hold on;plot(ttABCD,fvABCD,'y-','linewidth',4)plot(tABCD,vABCD,'r*','markersize',10)tABCD2=0:0.25:(numel(x1)+numel(x2)-2)*0.25;k=1;ii=1;for i=ttABCDif(i==tABCD2(k))plot(ttABCD(ii),fvABCD(ii),'k.','markersize',32)k=k+1;endii=ii+1;endx1230=[0 10];y12=[12 12];y30=[30 30];plot(x1230,y12,'m-','linewidth',1)plot(x1230,y30,'g-','linewidth',1)title('速度-时间曲线');ylabel('v/(km/h)');xlabel('t/h');axis([0 10 0 80]);grid;vABCD4.s-t曲线:clc;x1=[0.2 0.5 1.5 4.96 6.55 9.71 13.17 16.23 18.36 20.53 23.15 26.49 28.23 29.1 30.65 30.92 31.67 33.03 34.35 35.01 37.5];y1=[6.66 5.7 4.95 5.28 4.68 5.19 2.34 6.94 5.55 9.86 5.28 3.87 3.04 2.88 3.68 2.38 2.06 2.58 2.16 1.45 6];x2=[ 0.2 0.4 1.8 4.90 6.51 9.73 13.18 16.20 18.92 20.50 23.23 25.56 28.31 29.45 30.00 30.92 31.67 33.31 34.23 35.81 37.5];y2=[6.66 10.5 19.89 24.52 34.82 40.54 37.67 41.38 30.00 19.68 14.56 18.86 18.55 22.66 18.28 15.06 13.42 11.86 7.68 9.45 6];xlabel('x')ylabel('y')T=0:0.25:9.25;s=[0,5.9038,7.6095,10.9378,15.7557,21.4035,24.1563,29.0218,34.5687,38.554,40.5074,41.5213,44.719,46.04 68,47.3297,48.8375,50.2637,51.2335,57.4227,61.8722,65.0099,69.2923,71.8026,73.6084,76.9832,81.3986,86 .6064,92.2505,97.271,104.2567,114.6304,126.475,131.6253,136.5139,144.2785,154.7044,160.6905,174.12]; plot(T,s,'k.','markersize',32)axis([0 10 0 180])grid;hold onT0=0:0.01:9.25;s0=spline(T,s,T0);xlabel('t')ylabel('s')plot(T0,s0,'b-','linewidth',4)title('路程-时间曲线');xlabel('t/h');ylabel('s/km');5.路况曲线:clc;clear;epsX=0.01;epsT=0.01;x1=[0.2,4.96,6.55,9.71,13.17,16.23,18.36,20.53,23.15,26.49,28.23,29.1,30.65,30.92,31.67,33.03,34.35,35.01,3 7.5];y1=[6.66,5.28,4.68,5.19, 2.34 , 6.94,5.55 ,9.86,5.28,3.87,3.04,2.88,3.68, 2.38, 2.06,2.58, 2.16,1.45,6];xa1=[0.2,0.5,1.5,3.0,4.96,6.55,9.71,13.17,16.23,18.36,20.53,23.15,26.49,28.23,29.1,30.65,30.92,31.67,33.03,3 4.35,35.01,37,37.4,37.5];ya1=[6.66,5.7,4.9,5.0,5.28,4.68,5.19,2.34,6.94,5.55 ,9.86,5.28,3.87,3.04,2.88,3.68,2.38,2.06,2.58,2.16,1.45,3,5, 6];x2=[0.2,1.8,4.90,6.51,9.73,13.18,16.20,18.92,20.50,23.23,25.56,28.31,29.45,30.00,30.92,31.67,33.31,34.23,35. 81,37.5];y2=[6.66,19.89,24.52,34.82,40.54,37.67,41.38,30.00,19.68,14.56,18.86,18.55,22.66,18.28,15.06,13.42,11.86,7.68,9.45,6];xa2=[0.2,0.4,1.8,4.90,6.51,9.73,13.18,16.20,18.92,20.50,23.23,25.56,28.31,29.45,30.00,30.92,31.67,33.31,34.2 3,35.81,36.8,37.4,37.5];ya2=[6.66,10.5,19.89,24.52,34.82,40.54,37.67,41.38,30.00,19.68,14.56,18.86,18.55,22.66,18.28,15.06,13.42,1 1.86,7.68,9.45,9.1,7,6];tx1=xa1(1):epsX:xa1(numel(xa1));tx2=xa2(1):epsX:xa2(numel(xa2));f1=spline(xa1,ya1,tx1);f2=spline(xa2,ya2,tx2);Ds1=[];Ds2=[];s1=[0];s2=[0];dS1=sqrt(diff(tx1).^2+diff(f1).^2);dS2=sqrt(diff(tx2).^2+diff(f2).^2);k=0;k1=0;ii=2;for i=tx1if(i>=x1(ii))k2=k;ii=ii+1;DdS1=dS1(k1+1:k2);Ds1=[Ds1 sum(DdS1)];k1=k2;endif k>0s1=[s1 dS1(k)+s1(k)];endk=k+1;endk=0;k1=0;ii=2;for i=tx2if(i>=x2(ii))k2=k;ii=ii+1;DdS2=dS2(k1+1:k2);Ds2=[Ds2 sum(DdS2)];k1=k2;endif k>0s2=[s2 dS2(k)+s2(k)];endk=k+1;endL1=sum(Ds1);L2=sum(Ds2);DsABCD=[Ds1 Ds2(numel(x2)-1:-1:1)];sABCD=[s1(1:numel(tx1)-1) s2+L1];vMax=66;vABCD=DsABCD*4;tABCD=0.125:0.25:0.125+(numel(x1)+numel(x2)-3)*0.25; ttABCD=0:epsT:(numel(x1)+numel(x2)-2)*0.25; fvABCD=spline(tABCD,vABCD,ttABCD);vABCD=[0 vABCD vMax];tABCD=[0 tABCD (numel(x1)+numel(x2)-2)*0.25]; fvABCD=spline(tABCD,vABCD,ttABCD)tSABCD=[];ttxABCD=[];ttyABCD=[];txABCD=[tx1 tx2(numel(tx2)-1:-1:1)];fABCD=[f1 f2(numel(tx2)-1:-1:1)];hold on;title('路面状况');xlabel('x/km');ylabel('y/km');axis([-5 40 0 45]);grid; %计算三种路段的值swi=1;triSABCD=[0 0 0];triTABCD=[0 0 0];iSTemp=1;iTTemp=1; %分析速度k=1;ii=1;sS=0;for i=ttABCDsS=sS+fvABCD(k)*epsT;while sS>sABCD(ii) && sABCD(ii)<=174.12if fvABCD(k)>=30plot(txABCD(ii),fABCD(ii),'g.','markersize',20)if(swi~=1)triSABCD(swi)=triSABCD(swi)+sABCD(ii)-sABCD(iSTemp);triTABCD(swi)=triTABCD(swi)+i-ttABCD(iTTemp);swi=1;iSTemp=ii;iTTemp=k;endelseif fvABCD(k)<30 && fvABCD(k)>=12plot(txABCD(ii),fABCD(ii),'m.','markersize',20)if(swi~=2)triSABCD(swi)=triSABCD(swi)+sABCD(ii)-sABCD(iSTemp);triTABCD(swi)=triTABCD(swi)+i-ttABCD(iTTemp);swi=2;iSTemp=ii;iTTemp=k;endelseplot(txABCD(ii),fABCD(ii),'k.','markersize',20)if(swi~=3)triSABCD(swi)=triSABCD(swi)+sABCD(ii)-sABCD(iSTemp); triTABCD(swi)=triTABCD(swi)+i-ttABCD(iTTemp);swi=3;iSTemp=ii;iTTemp=k;endendii=ii+1;endtSABCD=[tSABCD sABCD(ii)];ttxABCD=[ttxABCD txABCD(ii)];ttyABCD=[ttyABCD fABCD(ii)];k=k+1;endplot(x1,y1,'k.','markersize',32)plot(x2,y2,'k.','markersize',32)triSABCD(swi)=triSABCD(swi)+174.12-sABCD(iSTemp)triTABCD(swi)=triTABCD(swi)+(numel(x1)+numel(x2)-2)*0.25-ttABCD(iTTemp) trivABCD=triSABCD./triTABCD。