模块通讯协议
- 格式:doc
- 大小:35.00 KB
- 文档页数:5
abbci801通讯模块说明书引言:abbci801通讯模块是一种先进的通讯设备,广泛应用于各种领域。
本文将详细介绍abbci801通讯模块的特点、工作原理以及使用方法,帮助用户更好地了解和使用该产品。
一、产品特点1. 高速传输:abbci801通讯模块采用先进的传输技术,能够实现高速、稳定的数据传输,满足用户对数据传输速度的需求。
2. 多协议支持:abbci801通讯模块支持多种通讯协议,包括TCP/IP、UDP、Modbus等,可根据用户需求进行灵活配置。
3. 强大的兼容性:abbci801通讯模块兼容多种硬件设备,可以与各种传感器、PLC等设备进行无缝对接,方便用户进行系统集成。
4. 可靠稳定:abbci801通讯模块具有高可靠性和稳定性,能够在各种恶劣环境下正常工作,有效保障系统的正常运行。
二、工作原理abbci801通讯模块通过与外部设备建立通讯连接,在设备之间进行数据传输和交换。
其工作原理如下:1. 通讯连接建立:abbci801通讯模块通过网络或串口与外部设备建立通讯连接,确保数据的传输通道畅通。
2. 数据解析:abbci801通讯模块接收到外部设备传来的数据后,对数据进行解析,将其转化为可理解的格式。
3. 数据处理:abbci801通讯模块对解析后的数据进行处理,根据用户的配置和需求,进行相应的操作和响应。
4. 数据传输:abbci801通讯模块将处理后的数据传输给外部设备,实现数据的双向传输。
三、使用方法1. 硬件连接:将abbci801通讯模块与外部设备进行正确连接,确保通讯线路正常。
2. 配置参数:根据实际需求,对abbci801通讯模块进行参数配置,包括通讯协议、通讯速率等。
3. 数据传输:启动abbci801通讯模块,与外部设备建立通讯连接后,即可进行数据传输。
4. 故障排除:在使用过程中,如遇到通讯故障或数据传输异常等情况,可以参考说明书中的故障排除方法进行处理。
结论:abbci801通讯模块是一种功能强大、稳定可靠的通讯设备,具有高速传输、多协议支持和强大的兼容性等特点。
松下plc网口通讯协议松下PLC(可编程逻辑控制器)是一种常用于自动化控制系统的设备,它可以通过各种通讯协议与其他设备进行数据交换。
其中较常见的一种通讯协议就是基于网口的通讯协议。
在工业自动化领域,通讯协议的选择对于设备之间的互联和数据交换非常重要。
对于松下PLC而言,网口通讯协议的选择决定了它能够与哪些设备进行通讯,以及通讯的稳定性和可靠性。
松下PLC支持多种通讯协议,如Modbus TCP、Ethernet/IP、Profinet等。
不同的通讯协议适用于不同的场景和需求。
例如,Modbus TCP是一种较为简单和通用的协议,适用于需要在PLC与其他设备之间进行数据交换的场景。
Ethernet/IP和Profinet等协议则更加适用于高性能和实时性要求较高的场景。
网口通讯协议的选择还需要考虑到PLC的硬件和软件支持。
松下PLC具有很好的兼容性,可以与多种通讯模块和协议一起使用。
同时,通过正确配置PLC的网络参数和通讯设置,可以确保通讯的稳定性和可靠性。
在实际应用中,使用松下PLC进行网口通讯需要采取一定的步骤。
首先,需要确定与PLC进行通讯的设备和协议类型。
其次,需要配置PLC的网络参数,包括IP地址、子网掩码和网关等。
然后,根据选择的通讯协议,配置PLC的通讯模块和相应的参数。
最后,通过编程和调试来实现PLC与其他设备之间的数据交换和通讯。
网口通讯协议在工业自动化领域中发挥着重要的作用。
它不仅实现了设备之间的数据交换,还为生产过程中的监测、控制和优化提供了基础。
在实际应用中,PLC通过网口通讯协议可以与传感器、执行器、人机界面等多种设备进行连接,实现对生产过程的全面控制和监测。
除了在工业自动化领域,网口通讯协议还广泛应用于其他领域,如智能家居、交通控制等。
通过网口通讯协议,各种设备可以相互连接,实现数据的共享和交换,提高了系统的整体效能和智能化水平。
总结起来,松下PLC通过网口通讯协议实现了设备之间的远程数据交换和通讯。
lin通讯协议lin通讯协议(Local Interconnect Network)是一种用于车辆网络的串行通信协议,主要应用于车辆电子系统中。
它的设计目标是在车辆电子系统中实现低成本、低带宽、低功耗的通信,以满足车辆电子系统对通信的需求。
lin通讯协议的应用范围涵盖了车身电子系统、底盘电子系统、动力总成电子系统等多个领域,成为了现代汽车电子系统中不可或缺的一部分。
lin通讯协议的特点之一是其低成本。
由于lin通讯协议主要应用于汽车电子系统中,因此对成本的要求非常高。
lin通讯协议采用了单主从结构,使用了一根双绞线作为通信介质,这使得lin通讯协议的硬件成本非常低廉。
此外,lin通讯协议的通信速率较低,仅为20 kbit/s,也降低了通信模块的成本。
因此,lin通讯协议在车辆电子系统中得到了广泛的应用。
另一个特点是低功耗。
在车辆电子系统中,对于通信模块的功耗要求也非常严格。
lin通讯协议采用了一种低功耗的通信方式,使得在整个车辆电子系统中,通信模块的功耗得到了有效的控制。
这使得lin通讯协议非常适合于车辆电子系统中对功耗有严格要求的场景。
此外,lin通讯协议还具有较强的抗干扰能力。
在车辆电子系统中,由于各种电子设备的工作,会产生大量的电磁干扰。
lin通讯协议采用了一种差分信号传输方式,使得其对于电磁干扰具有一定的抵抗能力,保证了通信的稳定性和可靠性。
总的来说,lin通讯协议作为一种用于车辆电子系统中的通信协议,具有低成本、低功耗、较强的抗干扰能力等特点,成为了现代汽车电子系统中不可或缺的一部分。
随着汽车电子系统的不断发展,lin通讯协议也在不断演进和完善,为汽车电子系统的发展提供了强大的支持。
总结,lin通讯协议的特点是低成本、低功耗、较强的抗干扰能力,适用于车辆电子系统中对通信有严格要求的场景。
它的应用范围涵盖了车身电子系统、底盘电子系统、动力总成电子系统等多个领域,为现代汽车电子系统的发展提供了强大的支持。
Q/GDW 376.2国网载波路由模块协议说明(N12N6协议)内部型号:GWR-M001型号说明:国网晓程载波路由模块日期:2011 年4月V1.0:标准版本;硬件基于单芯片CEP3001AC(PL3201B)V1.2:第一次发布版本V1.4:增加了串口发送载波发送缓冲长度后的版本;V1.5:2011-1发布最新版本,完善了学习收敛,每块表学习时间约5分钟;(请更新为此版本)北京福星晓程电子科技股份有限公司目录目录 (ii)集中器载波路由模块Q/GDW-376.2协议说明 (3)一GDW-M001模块支持项目 (3)二标准Q/GDW 376.2协议实现说明 (4)2.1信息域R填写说明 (4)2.1.1 下行报文: (4)2.1.2 上行报文: (5)2.2 确认∕否认(AFN=00H) (6)2.3 初始化(AFN=01H) (6)2.4 查询数据(AFN=03H) (7)2.5链路接口检测(AFN=04H) (7)2.6 控制命令(AFN=05H) (7)2.7主动上报(AFN=06H) (8)2.8路由查询(AFN=10H) (8)2.9路由设置(AFN=11H) (9)2.10路由控制(AFN=12H) (10)2.11路由数据转发(AFN=13H) (10)三建议集中器操作流程说明 (11)3.1 上电启动 (11)3.2 载波主节点地址 (12)3.3 路由模块档案管理 (12)3.4 集中器点抄 (13)3.5 集中器轮抄 (14)3.6 集中器控制路由学习 (14)3.7启动表号自动上报 (15)集中器载波路由模块Q/GDW-376.2协议说明载波路由模块通讯协议遵从国家电网公司电力用户用电信息采集系统通信协议Q/GDW-376.2《电力用户用电信息采集系统通信协议:集中器本地路由模块接口协议》,集中器与下行通信路由模块本地接口部分,所支持的具体规约内容为其子集。
本文档说明范围限于国网标准规约(N12规约及N6规约,二者只在载波帧上有差异,调用方式完全一致)。
竭诚为您提供优质文档/双击可除adam4017通讯协议篇一:易控对研华adam-4017+测试方法研华adam-4017+测试方法模块是接10—30Vdc.我在这里测试的时候接的是24Vdc 1研华adam-4017+的有两种模式,init和normal。
init 状态下可以改变模块的协议方式(modbus协议、研华协议)。
normal状态下是进行正常通讯的。
如何改变两种协议呢?下面是演示:首先把模块侧面的拨码开关拨到init一边,表明模块在初始化的状态下,可以修改模块的地址,波特率,协议方式,数据结构等参数。
这些操作时是在研华软件上进行的。
安装adam/utility测试软件。
打开软件,确认线路和电源连接正确。
右击com1---search—start你将会得到下面的图片。
modbus对应的是标准的modbus协议,advantech对应着研华协议如上图所示,有地址、波特率和协议选择的修改。
然后点击---applychange。
注意:在完成初始化要修改的参数后,把模块断电,然后拨码开关拨到normal状态。
模块就可以再正常状态下工作了。
谨记两种协议之间的修改,必须要在init状态下。
2打开易控,建立工程。
io通信---串口---模块---研华---adam4017.这个对应的是研华协议。
以上参数配置请与在研华测试软件上设置的一致。
参数配置好之后,点击运行在公司测试的时候,设备的协议修改为是modbus协议,设备地址是3。
您可以根据自己的需要进行测试。
篇二:adam-4117模块使用手册adam-4117快速入门手册一、adam-4117概述adam-4117是16位a/d、8通道的模拟量输入模块,可以采集电压、电流等模拟量输入信号,并且为所有通道都提供了独立的可编程的输入范围。
在工业测量和监控的应用中,adam-4117具有良好的性价比。
它不仅能够用于恶劣的环境中,而且还具有更加坚固型的设计。
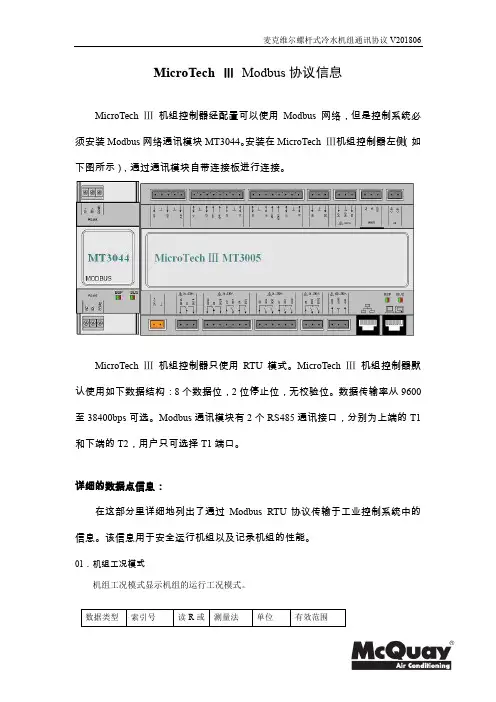
MicroTech ⅢModbus协议信息MicroTech Ⅲ机组控制器经配置可以使用Modbus网络,但是控制系统必须安装Modbus网络通讯模块MT3044。
安装在MicroTech Ⅲ机组控制器左侧(如下图所示),通过通讯模块自带连接板进行连接。
MicroTech Ⅲ机组控制器只使用RTU模式。
MicroTech Ⅲ机组控制器默认使用如下数据结构:8个数据位,2位停止位,无校验位。
数据传输率从9600至38400bps可选。
Modbus通讯模块有2个RS485通讯接口,分别为上端的T1和下端的T2,用户只可选择T1端口。
详细的数据点信息:在这部分里详细地列出了通过Modbus RTU协议传输于工业控制系统中的信息。
该信息用于安全运行机组以及记录机组的性能。
01.机组工况模式机组工况模式显示机组的运行工况模式。
This Data-list provides information about the Modbus Protocol for McQuay MircoTech Ⅲchillers. The MicroTech Ⅲcontroller communicates with the BAS on the basis of module MT3044 configuration, installed at the left side of the main controller as shown below, connected with the connection board together.The MicroTech Ⅲunit controller may be integrated into a serial Modbus RTU mode. The default communication setting of main controller is as the fellow:8 word data bits, 2 word stop bit, no parity bit, 9600~38400bps baud(optional)。
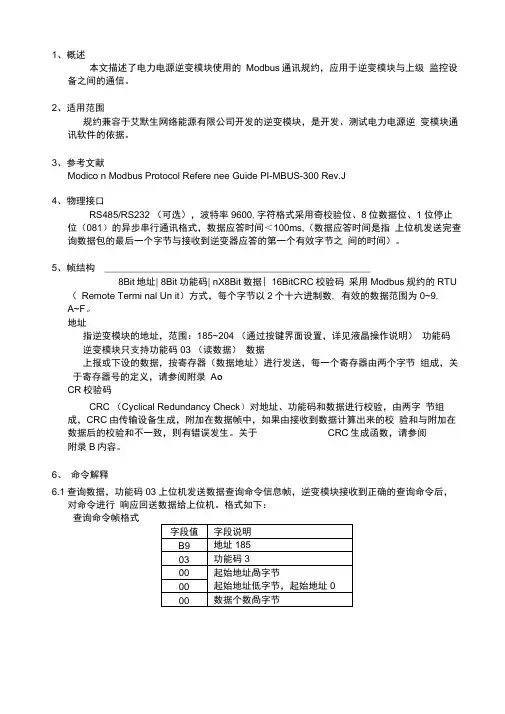
1、概述本文描述了电力电源逆变模块使用的Modbus通讯规约,应用于逆变模块与上级监控设备之间的通信。
2、适用范围规约兼容于艾默生网络能源有限公司开发的逆变模块,是开发、测试电力电源逆变模块通讯软件的依据。
3、参考文献Modico n Modbus Protocol Refere nee Guide PI-MBUS-300 Rev.J4、物理接口RS485/RS232 (可选),波特率9600,字符格式采用奇校验位、8位数据位、1 位停止位(081)的异步串行通讯格式,数据应答时间<100ms,(数据应答时间是指上位机发送完查询数据包的最后一个字节与接收到逆变器应答的第一个有效字节之间的时间)。
5、帧结构 ________________________________________________________8Bit地址| 8Bit功能码| nX8Bit数据| 16BitCRC校验码采用Modbus规约的RTU (Remote Termi nal Un it)方式,每个字节以2个十六进制数, 有效的数据范围为0~9, A~F。
地址指逆变模块的地址,范围:185~204 (通过按键界面设置,详见液晶操作说明)功能码逆变模块只支持功能码03 (读数据)数据上报或下设的数据,按寄存器(数据地址)进行发送,每一个寄存器由两个字节组成,关于寄存器号的定义,请参阅附录A oCR校验码CRC (Cyclical Redundancy Check)对地址、功能码和数据进行校验,由两字节组成,CRC由传输设备生成,附加在数据帧中,如果由接收到数据计算出来的校验和与附加在数据后的校验和不一致,则有错误发生。
关于CRC生成函数,请参阅附录B内容。
6、命令解释6.1查询数据,功能码03 上位机发送数据查询命令信息帧,逆变模块接收到正确的查询命令后,对命令进行响应回送数据给上位机。
格式如下:查询命令帧格式逆变模块响应帧格式注意:上位机可以一次查询一个寄存器的数据也可一次查询几个寄存器数据,另外可以从任意有效地址开始查询寄存器数据(注意合理的起始地址和查询个数)。

使⽤STM32F030F4P6的SPI协议和NRF24L01模块进⾏通讯实现⽆线数据的收发单⽚机这块纯属个⼈业余爱好, 有很多不⾜的地⽅还请⼤家多多指教, 代码中有些命名不规范的地⽅还请⼤家多多包涵.本⽂只实现⽆线模块的简单的点亮(能收发⼀个字节数据), ⼀直想diy⼀个⽆线遥控的⼩车, 就要使⽤到⽆线模块, 找了好久发现NRF24L01(下⾯简称NRF)是最便宜的⼀款⽆线模块(除过WiFi和蓝⽛模块), 就买了⼏个, 由于stm32f103涨价, 就选择了便宜的stm32f030, ⽹上找了很多资料对于stm32f030的资料很少, 他和stm32f103代码⼤同⼩异, 就试着在stm32f103代码的基础上修改⼀下, 就是不能通讯, 只能发送成功, 不能接收到数据, 搁置了好久最后从新选择了⼀块 HC-12 的⽆线通讯模块, 这个模块⽐较贵⾸次购买⼀套(收发两个模块)⽐较便宜, 空旷视野最远通讯距离1公⾥(没有实测量过), 他使⽤的是串⼝通讯, 写好代码烧录进去后可以通讯, 最后成功diy了⽆线遥控⼩车, 利⽤HC-12感觉⼤材⼩⽤了, 最后闲来⽆事就⼜琢磨⼀下这个NRF模块, 终于可以相互通讯了, 也不知道哪⾥出问题了, 唯⼀不同的是, 之前的是在⽹上找的资料上修修改改, 没有使⽤中断, 只使⽤了while循环进⾏检测, 这次重头开始编写的时候使⽤了中断, 在调试了⼀下就可以通讯.遇到的⼀些问题:1.原理图上PA4 是SPI1的⽚选spi1_nss的复⽤, 配置的时候把PA4也配置成了复⽤模式, 发现不能成功, 需要配置成输出模式解决了问题2.NRF的IRQ脚配置中断的时候需要配置为下降沿触发3.stm32板⼦和NRF模块进⾏连接的时候数据输出和输⼊线不能交叉连接(MCU 的MISO 和 NRF的 MISO 相连, MOSI同理)以下是代码 , 适⽤于stm32f0301. spi配置#ifndef __bsp_spi_h#define __bsp_spi_h#include "stm32f0xx_gpio.h"#define SPIx SPI1 //SPI_1#define SPI1_PORT GPIOA //PA 端⼝#define PORTA_LCK RCC_AHBPeriph_GPIOA //GPIO 时钟#define SPI_LCK RCC_APB2Periph_SPI1//spi 时钟#define SPI1_CSN GPIO_Pin_1 //PA1 NSS#define SPI1_SCK GPIO_Pin_5 //PA5 SCK#define SPI1_MISO GPIO_Pin_6 //PA6 MISO#define SPI1_MOSI GPIO_Pin_7 //PA7 MOSIvoid SPI_Config(void);u8 SPI_SendByte(u8 byte);void Pin_CSN(u8 u);#endifbsp_spi.h#include "bsp_spi.h"#include "stm32f0xx_gpio.h"//初始化void SPI_Config(){GPIO_InitTypeDef GPIO_InitStruct;SPI_InitTypeDef SPI_InitStruct;//端⼝初始化RCC_AHBPeriphClockCmd(PORTA_LCK , ENABLE);//开启GPIO时钟RCC_APB2PeriphClockCmd(SPI_LCK, ENABLE);//开启SPI_1时钟//复⽤模式GPIO_PinAFConfig(SPI1_PORT,GPIO_PinSource5,GPIO_AF_0);//SCKGPIO_PinAFConfig(SPI1_PORT,GPIO_PinSource6,GPIO_AF_0);//MISOGPIO_PinAFConfig(SPI1_PORT,GPIO_PinSource7,GPIO_AF_0);//MOSIGPIO_InitStruct.GPIO_Pin = SPI1_SCK | SPI1_MISO | SPI1_MOSI;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;GPIO_Init(SPI1_PORT, &GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = SPI1_CSN;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;GPIO_Init(SPI1_PORT , &GPIO_InitStruct);//spi初始化//SPI_I2S_DeInit(SPIx); //将寄存器重设为缺省值//SPI_Cmd(SPIx, DISABLE);//SPI_Direction_2Lines_FullDuplex SPI_Direction_1Line_Rx SPI_Direction_1Line_TxSPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//SPI_Mode_Master 主机 SPI_Mode_Slave 从机SPI_InitStruct.SPI_Mode = SPI_Mode_Master;SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b;SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low;//SPI_CPOL_Low SPI_CPOL_HighSPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge;//SPI_CPHA_1Edge SPI_CPHA_2EdgeSPI_InitStruct.SPI_NSS = SPI_NSS_Soft;SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8;//SPI_FirstBit_MSB SPI_FirstBit_LSBSPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB;SPI_InitStruct.SPI_CRCPolynomial = 7;SPI_Init(SPIx, &SPI_InitStruct);//SPI_I2S_IT_TXE SPI_I2S_IT_RXNE SPI_I2S_IT_ERRSPI_I2S_ITConfig(SPIx, SPI_I2S_IT_TXE | SPI_I2S_IT_RXNE, ENABLE);//中断SPI_RxFIFOThresholdConfig(SPI1, SPI_RxFIFOThreshold_QF); //重要,把应答数据位设置为 8 位 SPI_Cmd(SPIx, ENABLE);//使能}//SPI 收发⼀个字节u8 SPI_SendByte(u8 byte){//设置时间溢出u32 SPITimeout = 0xffff;/* 等待发送缓冲区为空,TXE 事件 */while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET){if ((SPITimeout--) == 0) return0;}/* 写⼊数据寄存器,把要写⼊的数据写⼊发送缓冲区 */SPI_SendData8(SPIx, byte);//SPI_I2S_SendData16//设置时间溢出SPITimeout = 0xfffff;/* 等待接收缓冲区⾮空,RXNE 事件 */while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET){if ((SPITimeout--) == 0) return0;}/* 读取数据寄存器,获取接收缓冲区数据 */return SPI_ReceiveData8(SPIx);}//设置⽚选⾼低电平void Pin_CSN(u8 u){if(u==0){SPI1_PORT->BRR = SPI1_CSN;}else{SPI1_PORT->BSRR = SPI1_CSN;}}bsp_spi.c2.nrf配置#ifndef __bsp_nrf0241_h#define __bsp_nrf0241_h#include "stm32f0xx_gpio.h"#define NRF_PORT GPIOA //PA 端⼝#define KEY0 GPIO_Pin_0 //KEY0#define LED0 GPIO_Pin_4 //LED0#define NRF_CE GPIO_Pin_2 //PA2 CE#define NRF_IRQ GPIO_Pin_3 //PA3 IRQ#define NOP 0xFF // 空操作。
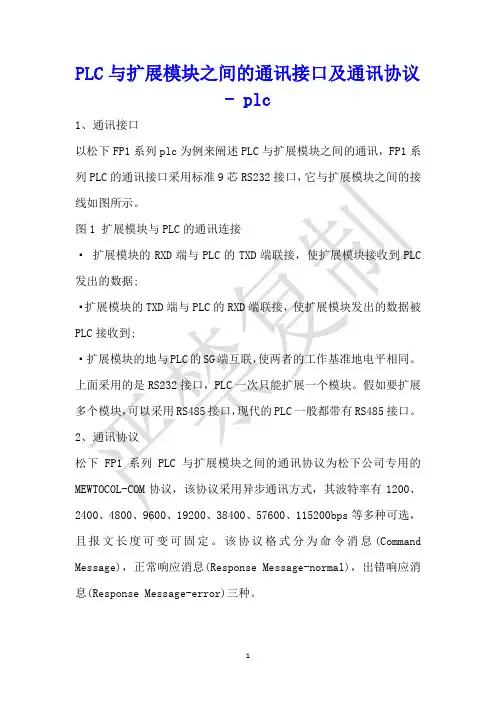
PLC与扩展模块之间的通讯接口及通讯协议- plc1、通讯接口以松下FP1系列plc为例来阐述PLC与扩展模块之间的通讯,FP1系列PLC的通讯接口采用标准9芯RS232接口,它与扩展模块之间的接线如图所示。
图1 扩展模块与PLC的通讯连接·扩展模块的RXD端与PLC的TXD端联接,使扩展模块接收到PLC 发出的数据;·扩展模块的TXD端与PLC的RXD端联接,使扩展模块发出的数据被PLC接收到;·扩展模块的地与PLC的SG端互联,使两者的工作基准地电平相同。
上面采用的是RS232接口,PLC一次只能扩展一个模块。
假如要扩展多个模块,可以采用RS485接口,现代的PLC一般都带有RS485接口。
2、通讯协议松下FP1系列PLC与扩展模块之间的通讯协议为松下公司专用的MEWTOCOL-COM协议,该协议采用异步通讯方式,其波特率有1200、2400、4800、9600、19200、38400、57600、115200bps等多种可选,且报文长度可变可固定。
该协议格式分为命令消息(Command Message),正常响应消息(Response Message-normal),出错响应消息(Response Message-error)三种。
其中:%为起始符,标记每一帧报文的开始;CR为结束符,标记每一帧报文的结束;AD为PLC的站地址,为两位16进制数,如00则表示第一台PLC; #、$、!标注该帧报文为何种类型。
Command code为命令代码,如例1中的“RD”,表示读数据区。
Response code为响应代码一般返回接收到的命令消息中的命令代码。
Error(H)和Error(L)为出错代码,是两位16进制数, 可根据其值在协议中查出错误的描述。
Text code为命令参数,如例1命令消息中“D 01105 01107”,“D”表示数据寄存器,“01105 01107”表示第1105号至1107号,而在例1响应消息中,“6300 4433 0A00”则表示DT1105至DT1107中数据分别为6300、4433、0A00。
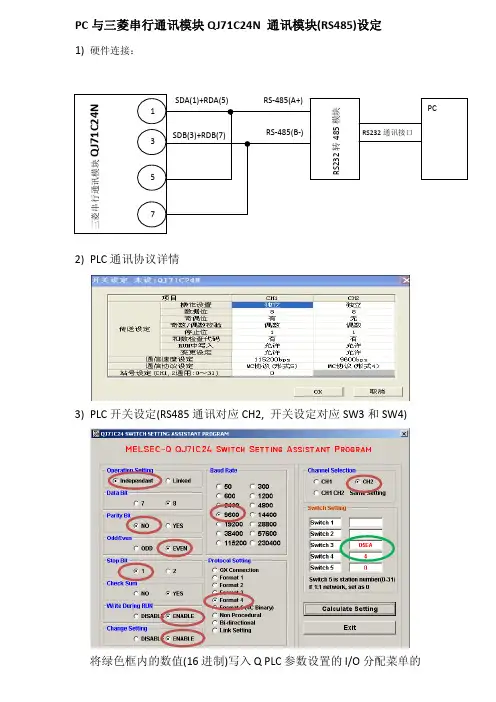
PC与三菱串行通讯模块QJ71C24N 通讯模块(RS485)设定1)硬件连接:2)PLC通讯协议详情3)PLC开关设定(RS485通讯对应CH2, 开关设定对应SW3和SW4)将绿色框内的数值(16进制)写入Q PLC参数设置的I/O分配菜单的开关设置。
其中开关3=05EA;开关4=0004.05EA 00044)软件设置A)PC 串口设置:MSComm Setting=”9600,N,8,1”;B)读出和写入数据协议(MC协议格式4):(1):读出PLC CPU的数据:(2)向PLC CPU写入数据:C)命令和功能一览表D)控制代码E)Example(1)读出D1616的数据(命令0401,子命令0000)ASCII:ENQ+F90000FF0004010000D*00161600010D+CR+LF (CheckSum=0D)Hex Code:05 46 39 30 30 30 30 46 46 30 30 30 34 30 31 30 30 30 3044 2A 30 30 31 36 31 36 30 30 30 31 30 44 0D 0AReturn Code:15 46 39 30 30 30 30 46 46 30 30 37 46 32 34 0D 0A (异常)02 46 39 30 30 30 30 46 46 30 30 30 30 36 34 03 46 38 0D 0A (正常)(2)将数据100(H0064)写入D1616(命令1401,子命令0000)ASCII: ENQ+F90000FF0014010000D*00161600010064D8+ CR+LF(CheckSum=D8)Hex:05 46 39 30 30 30 30 46 46 30 30 31 34 30 31 30 30 30 30 44 2A 30 30 31 36 31 36 30 30 30 31 30 30 36 34 44 38 0D 0AReturn Code:15 46 39 30 30 30 30 46 46 30 30 37 46 32 34 0D 0A(异常)06 46 39 30 30 30 30 46 46 30 30 0D 0A (正常)F)三菱PLC特殊寄存器含义:SM111 通讯状态:0正常;1异常;(ASCII: ENQ+F90000FF0004010000SM000111000134+CR+LF)SD203CPU运行状态:0:Run;2:Stop;(ASCII:ENQ+F90000FF0004010000SD00020300012D+CR+LF)G)校验代码算法(CHECKSUM)所有ENQ(05H)到数据内容的和数相加,取后一字节,如发送下述内容:05 46 39 30 30 30 30 46 46 30 30 31 34 30 31 30 30 30 30 44 2A 30 30 31 36 31 36 30 30 30 31 30 30 36 34 44 38 0D 0A,则计算粗体部分的和=06D8(Hex),取后两位D8,所以CheckSum=D8(Hex 44H 38H).。
竭诚为您提供优质文档/双击可除nrf24l01通讯协议篇一:nRF24l01无线通信模块使用手册12深圳市德普施科技有限公司nRF24l01无线通信模块使用手册一、模块简介该射频模块集成了noRdic公司生产的无线射频芯片nRF24l01:1.支持2.4ghz的全球开放ism频段,最大发射功率为0dbm2.2mbps,传输速率高3.功耗低,等待模式时电流消耗仅22ua4.多频点(125个),满足多点通信及跳频通信需求5.在空旷场地,有效通信距离:25m(外置天线)、10m(pcb天线)6.工作原理简介:发射数据时,首先将nRF24l01配置为发射模式,接着把地址tx_addR和数据tx_pld按照时序由spi口写入nRF24l01缓存区,tx_pld必须在csn为低时连续写入,而tx_addR在发射时写入一次即可,然后ce置为高电平并保持至少10μs,延迟130μs后发射数据;若自动应答开启,那么nRF24l01在发射数据后立即进入接收模式,接收应答信号。
如果收到应答,则认为此次通信成功,tx_ds置高,同时tx_pld从发送堆栈中清除;若未收到应答,则自动重新发射该数据(自动重发已开启),若重发次数(aRc_cnt)达到上限,max_Rt置高,tx_pld不会被清除;max_Rt或tx_ds 置高时,使iRq变低,以便通知mcu。
最后发射成功时,若ce为低,则nRF24l01进入待机模式1;若发送堆栈中有数据且ce为高,则进入下一次发射;若发送堆栈中无数据且ce为高,则进入待机模式2。
接收数据时,首先将nRF24l01配置为接收模式,接着延迟130μs进入接收状态等待数据的到来。
当接收方检测到有效的地址和cRc时,就将数据包存储在接收堆栈中,同时中断标志位Rx_dR置高,iRq变低,以便通知mcu去取数据。
若此时自动应答开启,接收方则同时进入发射状态回传应答信号。
最后接收成功时,若ce变低,则nRF24l01进入空闲模式1。
易语言串口通讯modbus协议模块上位机必备例子源代码1.引言1.1 概述在编写易语言串口通讯modbus协议模块上位机必备例子源代码之前,我们首先需要了解一些基本概念和背景知识。
本文介绍了该例子的目的和结构,以及引言、正文和结论三个主要部分的内容。
1.1概述Modbus协议是一种常用的串行通信协议,广泛应用于工业自动化领域。
它被设计用于在不同设备之间进行数据传输和通信。
Modbus协议简洁明了,易于实现和部署,因此被许多工业设备和上位机所采用。
易语言是一种面向过程的编程语言,易于学习和使用。
它提供了丰富的库和模块,方便我们进行串口通讯编程。
易语言的特点是语法简单易懂,同时也支持调用其他语言编写的DLL函数,可以实现更加复杂的功能。
本例子的目标是演示如何使用易语言编写一个串口通讯的Modbus 协议模块,并结合上位机的必备功能来实现数据的读写和显示。
在正文部分,我们将介绍Modbus协议的简要概述,包括其通信方式、数据格式、功能码等。
同时,我们还将介绍易语言中的串口通讯模块及其基本用法。
在结论部分,我们将提供一些实例源代码示例,以便读者更好地理解和使用这个例子。
此外,我们还将列举一些上位机必备的功能,以供读者参考和扩展应用。
通过这个例子,读者可以学习到如何使用易语言进行串口通讯编程,并了解Modbus协议在实际应用中的运用。
同时,读者也可以根据自己的需求和实际情况,对例子进行二次开发和改进,以适应不同的应用场景。
在下一节中,我们将详细介绍Modbus协议的相关知识,以便读者更好地理解本例子的内容和实现。
文章结构部分主要是对整篇文章的组织和安排进行介绍,以下是1.2 文章结构的内容:1.2 文章结构本文主要分为三个部分,包括引言、正文和结论,具体如下:1. 引言部分介绍了本文的概述、文章结构和目的。
在概述中,我们对易语言串口通讯modbus协议模块上位机必备例子源代码进行了简要介绍,指出了本文的主要内容和目标。
MULTICAL® 603 M-Bus协议(V1.1)1.介绍1.1概况介绍•本协议只适用于MULTICAL 603 M-Bus。
•M-Bus模块有如下几种。
图1 图2图3•HC-003-20和HC-003-21可以使用电池和市电供电,但是HC-003-22只可以使用24V 和230V电源供电。
•HC-003-33可以用于连接24VAC常开或常关的电热执行器。
•支持的波特率有300,2400,9600和19200,8E1。
1.2通信间隔•MULTICAL603最小通信间隔为2s。
•为了确保电池寿命,通信间隔应大于10s。
不建议太频繁的通信。
1.3M-Bus格式M-Bus协议有以下几种帧格式。
1.4通信流程M-Bus抄表可分为下面四种抄表方式。
每块表都有一个独立的一级地址,一级地址通信最多可连接250块表。
➢按照二级地址通信二级地址(序列号)通讯是对一级地址通讯的扩展。
当仪表数量过多时,一级地址无法满足通讯要求,此时需要通过二级地址进行扩展。
与一级地址通讯不同,使用二级地址通讯时首先要通过二级地址“选择仪表”。
选择仪表成功后,便可通过一级地址“FDh”与被选中仪表进行通讯。
通讯结束后还要发送“取消选择” 命令,以释放一级地址“FDh”,以备继续与其他仪表通讯。
具体流程如下:➢点对点通信点对点通信仅用于采集器只连接一块表时,一级地址统一使用“FE”,抄表流程与一级地址通信完全相同。
➢广播通信广播通信用于对仪表参数统一配置的情况下,如修改仪表的时钟,修改仪表的波特率等。
广播通信时一级地址统一设为“FF”,广播通信只需要发送修改参数命令,仪表没有应答。
1.5一级地址出厂默认的一级地址为热量表SN号的后三位。
如果后三位数值在001~250之间,则就认为此数值为一级地址。
如果后三位数值大于250,则取后两位数值作为一级地址。
2.常用M-Bus指令2.1选择仪表指令SND_UD -> ACK请求命令:68 0B 0B 68 53 FD 52 NN NN NN NN HH HH ID MM CS 16应答命令:E5命令解析:此命令使用二级地址选择仪表,选择成功后可进行数据请求及配置命令。
BMS上位机通讯协议1、通讯规范总线波特率:暂定250K bps数据链路层采用CAN 2.0B定义2.上位机接收CAN帧仲裁域控制域数据域校验域S O F 标识符SRRIDE标识符扩展RTRrr1DLC数据域 CRCCRC分割符ACK EOF1 11 1 1 18 1 1140~64 1 12 7 ID分配(29位)功能定义优先级(P) 保留位(R)数据页(DP)PDU格式(PF)目标地址(DA)源地址(SA)位数(Bit28-Bit0) 3(28-26)1(25)1(24)8(23-16)8(15-8)8(7-0)取值范围 6 0 0 0~239 0~255 0~255地址分配(暂定,可根据监控调整)模块名称地址上位机监控模块 244(0xF4)下位机采集模块基地址(0)+模块编号(1-10)数据帧编号数据帧名称格式编号(PF)模块上报:模拟量0x20-0x23收发机制:监控设置完相关信息后,各模块自主上报数据;监控模块可根据定时上报的地址检查子模块的配置完整性2、数据定义上传信息帧1ID:0x1820F401 周期P R DP PF DA SA 100ms6 0 0 32 (0x20)监控模块 采集模块 数据位置 数据名格式说明BYTE1 本模块第一节单体电压低字节 BYTE2 本模块第一节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第二节单体电压低字节 BYTE4 本模块第二节单体电压高字节 同上BYTE5 本模块第三节单体电压低字节 BYTE6 本模块第三节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上上传信息帧2ID: 0x1821F401周期P R DP PF DA SA 6 0 0 33 (0x21)监控模块 采集模块100ms数据位置 数据名格式说明BYTE1 本模块第四节单体电压低字节 BYTE2 本模块第四节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第五节单体电压低字节 BYTE4 本模块第五节单体电压高字节 同上BYTE5 本模块第六节单体电压低字节 BYTE6 本模块第六节单体电压高字节 同上 BYTE7 模块号 BYTE8箱号同上上传信息帧3ID: 0x1822F401周期P R DP PF DA SA 6 0 0 34 (0x22)监控模块 采集模块100ms数据位置 数据名格式说明BYTE1 本模块第七节单体电压低字节 BYTE2 本模块第七节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第八节单体电压低字节 BYTE4 本模块第八节单体电压高字节 同上BYTE5 本模块第九节单体电压低字节 BYTE6 本模块第九节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上上传信息帧4ID: 0x1823F401周期P R DP PF DA SA 6 0 0 35 (0x23)监控模块 采集模块100ms数据位置 数据名格式说明 BYTE1 本模块第十节单体电压低字节 BYTE2 本模块第十节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第十一节单体电压低字节 BYTE4 本模块第十一单体电压高字节 同上BYTE5 本模块第十二节单体电压低字节 BYTE6 本模块第十二节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上。
SPM监控模块后台Modbus通讯协议艾默生网络能源有限公司目次1 概述 (3)2 监控内容 (3)2.1 模拟量数据 (3)2.2 告警量数据 (3)2.3 系统设置量数据 (3)2.4 支路设置量数据 (3)3 物理接口 (3)3.1 串行通讯口 (3)3.2 信息传输方式 (3)3.3 数据传输速率 (3)3.4 通讯方式 (3)4 SPM Modbus数据帧格式 (3)4.1 信息类型 (3)4.2 FC3/FC4块读取 (4)4.3 FC6字写入 (5)4.4 FC16块写入 (5)4.5 异常反馈帧 (6)5 后台通信部分 (8)5.1 按支路获取模拟量数据 (8)5.1.1按支路获取地址范围限制说明 (10)5.1.2 省略部分说明 (10)5.2 按类型获取模拟量数据 (11)5.2.1 按类型获取地址范围说明 (12)5.2.2 省略部分说明 (12)5.3 主要模拟量数据 (13)3.4.1 主要模拟量说明 (13)3.4.2 省略部分说明 (13)5.4 获取告警量数据 (14)5.4.1 告警量说明 (17)5.4.2 主路告警量说明 (17)5.4.3 采集板就绪状态告警说明 (17)5.2.4 系统告警量说明 (17)5.4.5 支路告警量说明 (17)5.4.6 省略部分说明 (17)5.5 获取系统设置量数据 (19)5.5.1 采集板有效状态说明 (19)5.5.2 输出干接点触发告警说明 (20)5.5.3 输入干接点正常状态说明 (21)5.6 获取支路设置量数据 (22)5.6.1 省略部分说明 (22)5.7 获取SPM总告警状态 (23)1 概述本文规定了SPM监控模块与后台监控软件之间的通讯协议。
2 监控内容2.1 模拟量数据具体监控量见下文表格2.2 告警量数据具体监控量见下文表格2.3 系统设置量数据具体监控量见下文表格2.4 支路设置量数据具体监控量见下文表格3 物理接口3.1 串行通讯口采用RS485/ RS2323.2 信息传输方式为异步方式,起始位1位,数据位8位,停止位1位,无校验3.3 数据传输速率2400 bps, 4800 bps, 9600bps默认:9600bps3.4 通讯方式监控站后台与SPM监控模块的通讯也为主从方式,监控站后台是上位机,SPM监控模块是下位机4 SPM Modbus数据帧格式4.1 信息类型信息分两种类型:(1)由主机发出到从机的命令信息(简称命令信息)(2)由从机返回到主机的响应信息(简称响应信息)4.2 FC3/FC4块读取NODE FUN ID(start) NR CRC1 bin 1 bin2 bin 2 bin 2 binNODE MODBUS节点号FUN 功能号,FC3=3,FC4=4ID(start) 所查询数据区的ID首址,必须是以上表格定义了的ID,先发送高位地址,再发送低位地址NR 所查询数据区的ID个数,先发送高位字节,再发送低位字节CRC 校验和,H-L方式NODE FUN NR_BYTE DATA CRC1 bin 1 bin 1 bin n bin2 binNODE MODBUS节点号FUN 功能号,FC3=3,FC4=4NR_BYTE 反馈数据DATA的字节个数,等于NR的两倍DATA 反馈数据区,长度等于NR_BYTE,每个数据先发送高位字节,再发送低位字节CRC 校验和,H-L方式FC3块读取例子:FC4块读取例子:4.3 FC6字写入查询帧:NODE FUN ID DATA CRC1 bin 1 bin2 bin 2 bin 2 binNODE MODBUS节点号FUN 功能号,FC6=6ID 所写入数据的ID地址,必须是以上表格定义了的ID,先发送高位地址,再发送低位地址DATA 所写入的数据,先发送高位数据字节,再发送低位数据字节CRC 校验和,允许H-L/L-H两种方式反馈帧:(原样返回)NODE FUN ID DATA CRC1 bin 1 bin2 bin 2 bin 2 binNODE MODBUS节点号FUN 功能号,FC6=6ID 所写入数据的ID地址,必须是以上表格定义了的ID,先发送高位地址,再发送低位地址DATA 所写入的数据,先发送高位数据字节,再发送低位数据字节CRC 校验和,允许H-L/L-H两种方式FC6块写入例子:4.4 FC16块写入查询帧:NODE FUN ID(start) NR NR_BYTE DATA CRC1 bin 1 bin2 bin 2 bin 1 bin n bin 2 binNODE MODBUS节点号FUN 功能号,FC16=16ID(start) 所写入数据区的ID首址,必须是以上表格定义了的ID,先发送高位地址,再发送低位地址。
电脑通讯协议
数据格式说明:
0XAF,0XAF:同步头
0X00,0X00:ID码(一般是0X00,0X00)
0XAF:头
0X80,0X00:命令码(上位机发码是0X80,YY,单片几发码给电脑0X00,YY)LEN:数据长度是从LEN开始到CS的数据个数,不包括LEN和CS
CS:是验证码,CS前面所有数据之和%0XFF
结束码:0X0D 0X0A
举例:
设置空中参数为9600代码为:
AF AF 00 00 AF 80 03 02 04 00 96 0D 0A
读取空中参数代码为:
AF AF 00 00 AF 80 04 02 00 00 93 0D 0A
//*************************************************************** ****
02发码设置串口
AF AF 00 00 AF 80 01 LEN XX YY CS 0D 0A
XX:01-1200
02-2400
03-4800
04-9600
05-19200
06-38400
07-56700
08-115200
YY:00-无验证
01-偶验证
02-奇验证
答应回码
AF AF 00 00 AF 00 01 LEN XX YY CS 0D 0A
XX:01-1200
02-2400
03-4800
05-19200
06-38400
07-56700
08-115200
YY:00-无验证
01-验证
02-奇验证
//*************************************************************** ****
03读串口参数
//读串口参数
//AF AF 00 00 AF 80 02 LEN 00 00 CS 0D 0A
//答应参数
//AF AF 00 00 AF 00 02 LEN XX YY CS 0D 0A
XX:01-1200
02-2400
03-4800
04-9600
05-19200
06-38400
07-56700
08-115200
YY:00-无验证
01-偶验证
02-奇验证
//*************************************************************** ****
04设空中参数//
//AF AF 00 00 AF 80 03 LEN XX YY CS 0D 0A
//XX 01-1200
02-2400
03-4800
04-9600
05-19200
06-38400
07-56700
08-115200
YY=0
//答应参数
//AF AF 00 00 AF 00 03 LEN XX YY CS 0D 0A
//XX 01-1200
02-2400
03-4800
05-19200
06-38400
07-56700
08-115200
YY=0
//*************************************************************** ****
05读空中参数
//AF AF 00 00 AF 80 04 LEN 00 00 CS 0D 0A
//答应参数
//AF AF 00 00 AF 00 04 LEN XX YY CS 0D 0A
//XX 01-1200
02-2400
03-4800
04-9600
05-19200
06-38400
07-56700
08-115200
YY=0
//*************************************************************** ****
06设信道 */
//AF AF 00 00 AF 80 05 LEN XX YY CS 0D 0A
//XX 01-第一通道()
// 02-第二通道()
// 03-第三通道()
// 04-第四通道()
// 05-第五通道()
// 06-第六通道()
// 07-第七通道()
// 08-第七通道()
注:这8个信道是YRM100F型号的信道
//YY=0
//答应参数
//AF AF 00 00 AF 00 05 LEN XX YY CS 0D 0A
//XX 01-第一通道()
// 02-第二通道()
// 03-第三通道()
// 04-第四通道()
// 05-第五通道()
// 06-第六通道()
// 07-第七通道()
// 08-第七通道()
注:这8个信道是YRM100F型号的信道
//YY=0
//*************************************************************** ****
07读信道*/
//AF AF 00 00 AF 80 06 LEN 00 00 CS 0D 0A
//答应参数
//AF AF 00 00 AF 00 06 LEN XX YY CS 0D 0A
//XX 01-第一通道()
// 02-第二通道()
// 03-第三通道()
// 04-第四通道()
// 05-第五通道()
// 06-第六通道()
// 07-第七通道()
// 08-第七通道()
注:这8个信道是YRM100F型号的信道
//YY=0
//*************************************************************** ****
发射功率设置:
1级--- AF AF 00 00 AF 80 13 02 01 00 A3 0D 0A 1mw
2级--- AF AF 00 00 AF 80 13 02 02 00 A4 0D 0A 3mw
3级--- AF AF 00 00 AF 80 13 02 03 00 A5 0D 0A 5mw
4级--- AF AF 00 00 AF 80 13 02 04 00 A6 0D 0A 10mw
5级--- AF AF 00 00 AF 80 13 02 05 00 A7 0D 0A 20mw
6级--- AF AF 00 00 AF 80 13 02 06 00 A8 0D 0A 50mw
7级--- AF AF 00 00 AF 80 13 02 07 00 A9 0D 0A 100mw
读取场强发送命令:
AF AF 00 00 AF 80 1A 02 00 00 A9 0D 0A
返回举例:AF AF 00 00 AF 00 1A 02 89 00 B2 0D 0A
AF AF 00 00 AF 00 1A 02 72 00 9B 0D 0A
AF AF 00 00 AF 00 1A 02 1F 00 48 0D 0A
红色数值越大表示场强越大
ID设置读取:
读取命令:AF AF 00 00 AF 80 0D 02 00 00 9C 0D 0A
设置ID为00001:AF AF 00 00 AF 80 0C 02 00 01 9C 0D 0A
设置ID为00002:AF AF 00 00 AF 80 0C 02 00 02 9D 0D 0A 设置ID为00003:AF AF 00 00 AF 80 0C 02 00 03 9E 0D 0A。