圆柱分度凸轮 图纸
- 格式:pdf
- 大小:107.68 KB
- 文档页数:1
圆柱凸轮设计结构_圆柱凸轮结构原理凸轮是一种具有曲线轮廓活凹槽的构件,圆柱凸轮的设计结构也是如此,其凸轮机构由凸轮、从动检和几家三部分组成。
随着市场的需求量逐渐增大,想要选购圆柱凸轮的朋友也想知道圆柱凸轮哪家好,因为他们不知道圆柱凸轮的设计机构自己结构原理究竟是怎样的,随着人们生产水平的提高,对于产品质量要求越来越高,对于圆柱凸轮设计机构怎样才能保质保量呢,让我们一起认识下它的机构原理究竟是怎么回事吧。
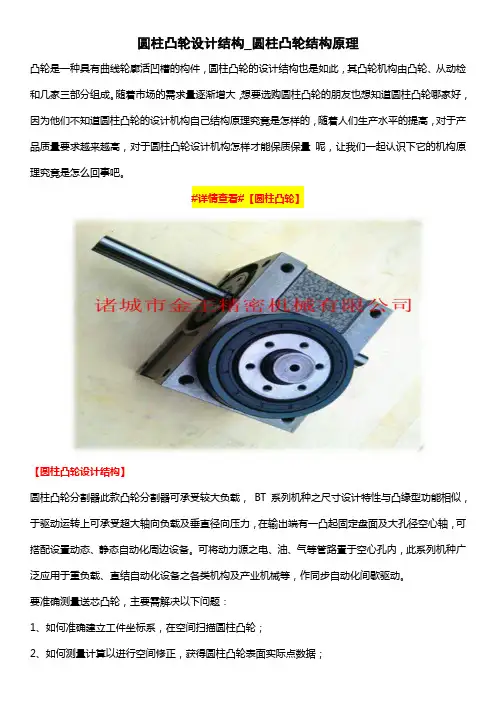
#详情查看#【圆柱凸轮】【圆柱凸轮设计结构】圆柱凸轮分割器此款凸轮分割器可承受较大负载,BT系列机种之尺寸设计特性与凸缘型功能相似,于驱动运转上可承受超大轴向负载及垂直径向压力,在输出端有一凸起固定盘面及大孔径空心轴,可搭配设置动态、静态自动化周边设备。
可将动力源之电、油、气等管路置于空心孔内,此系列机种广泛应用于重负载、直结自动化设备之各类机构及产业机械等,作同步自动化间歇驱动。
要准确测量送芯凸轮,主要需解决以下问题:1、如何准确建立工件坐标系,在空间扫描圆柱凸轮;2、如何测量计算以进行空间修正,获得圆柱凸轮表面实际点数据;3、如何在平面内进行理论曲线与实际曲线的比较。
建立工件坐标系,扫描圆柱凸轮通过对圆柱凸轮的分析,此凸轮不像平面凸轮那样,只在某一个平面内扫描曲线,而圆柱凸轮的轮廓是复杂的空间曲面,扫描测量无法在某一个平面内完成,因此不适合建立直角坐标系,而要根据其特点建立极坐标系,经过反复研读测量软件说明书,深入分析各探测点类型含意,终实现了探针在给定直径上进行圆柱扫描。
【圆柱凸轮结构原理】圆柱凸轮主要由凸轮的回转运动或往复运动推动从动件作规定往复移动或摆动的机构。
凸轮具有曲线轮廓或凹槽,有盘形凸轮、圆柱凸轮和移动凸轮等,其中圆柱凸轮的凹槽曲线是空间曲线,因而属于空间凸轮。
从动件与凸轮作点接触或线接触,有滚子从动件平底从动件和从动件等。
从动件能与任意复杂的凸轮轮廓保持接触,可实现任意运动,但容易磨损,适用于传力较小的低速机构中。
圆柱凸轮机构
圆柱凸轮机构是一种常用的运动机构,其主要作用是将旋转运动转换为直线运动或者将直线运动转换为旋转运动。
它由凸轮、摆杆、从动件和固定件组成,其中凸轮是主动件,摆杆和从动件是运动副,固定件则是支撑机构的固定部分。
圆柱凸轮机构的原理是利用凸轮的凸起部分与摆杆相接触,使得摆杆在凸轮的作用下做直线运动。
凸轮的凸起部分与从动件相接触,从而使得从动件在凸轮的作用下做旋转运动。
通过这种方式,圆柱凸轮机构可以实现各种不同的运动形式,并且具有结构简单、制造成本低、使用寿命长等优点。
圆柱凸轮机构的应用十分广泛,可以用于各种机械装置中,例如汽车发动机、工业机器人、印刷机等。
其中最常见的应用是在汽车发动机中,圆柱凸轮机构被用来控制气门的开关,从而实现发动机的正常工作。
圆柱凸轮机构的设计和制造需要考虑许多因素,例如凸轮的形状、大小、材料等。
凸轮的形状直接影响机构的运动形式和性能,因此需要根据具体的应用需求进行设计。
凸轮的大小和材料则需要考虑机构的承载能力和使用寿命等因素,以确保机构的可靠性和稳定性。
除了设计和制造,圆柱凸轮机构的使用和维护也需要注意一些问题。
例如,在使用过程中需要定期检查凸轮的磨损情况,及时更换磨损严重的凸轮,以避免机构的失效。
此外,机构的润滑也需要注意,应根据机构的使用条件选择适当的润滑方式和润滑剂,以确保机构的
正常运转。
总之,圆柱凸轮机构是一种常用的运动机构,其应用广泛,具有结构简单、制造成本低、使用寿命长等优点。
在设计、制造、使用和维护过程中,需要考虑许多因素,以确保机构的性能和可靠性。
圆柱凸轮的轮廓曲线通常是由一个或多个圆弧和直线段组成的。
该曲线用于将旋转运动转化为直线或曲线运动,常用于机械传动系统中。
圆柱凸轮的轮廓曲线可以通过以下步骤来构造:
1. 确定凸轮的基本参数:包括凸轮的直径、凸轮轴的位置、凸轮的高度等。
2. 绘制凸轮轴:以凸轮轴为中心,绘制一个圆,该圆的直径即为凸轮的直径。
3. 根据需要绘制凸轮的起点和终点:可以根据设计需求,在凸轮轴上确定凸轮的起点和终点。
4. 绘制凸轮的运动轨迹:根据凸轮的起点和终点,确定凸轮的运动轨迹。
这可以通过连接起点和终点,并添加适当的曲线段来完成。
5. 检查凸轮的运动轨迹:确保凸轮的运动轨迹符合设计要求,不会发生异常。
需要注意的是,凸轮轮廓曲线的具体形状会根据实际设计需求而变化,上述步骤仅为一般性指导。
在实际应用中,可能需要根据具体要求进行更加详细和精确的设计和计算。
第二十七讲下一讲学时:2学时课题:第十章凸轮机构 10.1 概述 10.2 常用的从动件运动规律目的任务:熟悉凸轮机构的应用和特点及类型,理解常用的从动件运动规律,能够绘制位移线图重点:凸轮机构的应用和特点及类型难点:立体凸轮机构运动的实现教学方法:利用动画演示机构运动,工程应用案例展示其应用场合。
第十章凸轮机构10.1概述凸轮机构由凸轮、从动件和机架三部分组成,结构简单,只要设计出适当的凸轮轮廓曲线,就可以使从动件实现任何预期的运动规律。
但另一方面,由于凸轮机构是高副机构,易于磨损,因此只适用于传递动力不大的场合。
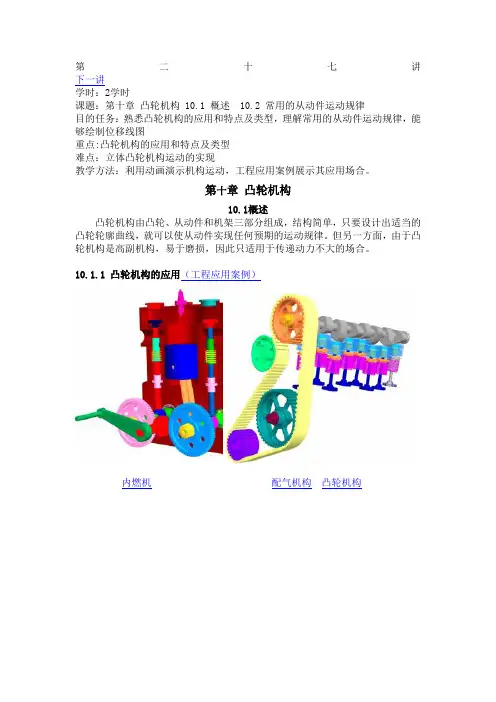
10.1.1 凸轮机构的应用(工程应用案例)内燃机配气机构凸轮机构自动车床上的走刀机构分度转位机构靠模车削机构10.1.2 凸轮机构的分类凸轮机构的类型很多,常就凸轮和从动杆的端部形状及其运动形式的不同来分类。
(1) 按凸轮的形状分1)盘形凸轮(盘形凸轮是一个具有变化向径的盘形构件绕固定轴线回转)尖顶移动从动杆盘形凸轮机构尖顶摆动从动杆盘形凸轮机构滚子移动从动杆盘形凸轮机构滚子摆动从动杆盘形凸轮机构平底移动从动杆盘形凸轮机构平底摆动从动杆盘形凸轮机构2)移动凸轮(移动凸轮可看作是转轴在无穷远处的盘形凸轮的一部分,它作往复直线移动。
)移动从动杆移动凸轮机构摆动从动杆移动凸轮机构3)圆柱凸轮(圆柱凸轮是一个在圆柱面上开有曲线凹槽,或是在圆柱端面上作出曲线轮廓的构件,它可看作是将移动凸轮卷于圆柱体上形成的。
)圆柱凸轮自动送料机构4)曲面凸轮按锁合方式的不同凸轮可分为:力锁合凸轮,如靠重力、弹簧力锁合的凸轮等;形锁合凸轮,如沟槽凸轮、等径及等宽凸轮、共轭凸轮等。
沟槽凸轮槽凸轮机构等宽凸轮等径凸轮(2) 按从动杆的端部形状分1) 尖顶这种从动杆的构造最简单,但易磨损,只适用于作用力不大和速度较低的场合(如用于仪表等机构中)。
2) 滚子滚子从动杆由于滚子与凸轮轮廓之间为滚动摩擦,磨损较小,故可用来传递较大的动力,因而应用较广。
毕业设计题目弧面分度凸轮的设计学院机械工程学院专业工业工程姓名冯堃学号 ***********指导教师王红岩二OO九年六月十日弧面分度凸轮的设计The Design of Roller Gear Indexing Cam专业:工业工程学生:冯堃指导教师:***济南大学机械工程学院二零零九年六月目 录摘 要 ............................................................i ABSTRACT .. (ii)第一章 绪论 ...................................................- 1 -1.1课题研究的背景和意义 .................................................................. - 1 - 1.2分度运动 .......................................................................................... - 1 - 1.3从动系统的工作原理 ...................................................................... - 2 - 1.4 凸轮驱动系统分度机构 .................................................................. - 3 -1.4.1精密分度凸轮机构的基本类型 ............................................... - 3 -第二章 弧面凸轮设计中基本参数的确认 .............................- 5 -2.1 弧面分度凸轮机构的基本形式与工作特点 ..................................... - 5 -2.2 运动的必要条件——凸轮曲线的选择 ............................................. - 6 -2.3 选择曲线时考虑的运动学参数 ......................................................... - 8 -2.4 弧面分度凸轮机构的主要运动参数 ................................................. - 9 -2.4.1 凸轮分度廓线头数H、转盘滚子数Z与转盘分度书I之间的关系 .................................................................................................................... - 9 -2.4.2 凸轮与转盘在分度期与停歇期的运动参数 .......................... - 9 -2.4.3动停比k 与运动系数τ ......................................................... - 10 -2.4.4 啮合重叠系数ε .................................................................... - 10 -2.5弧面分度凸轮机构的主要几何尺寸计算 ........................................ - 11 -2.5.1凸轮节圆半径1p r ,转盘节圆半径2p r 与中心距C ............... - 11 -2.5.2许用压力角p a ...................................................................... - 11 -2.5.3转盘节圆半径2p r .................................................................... - 11 -2.5.4滚子数z 、相邻两滚子轴线间夹角z φ、滚子半径ρ与宽度b . -11 -2.5.5凸轮的主要尺寸 ..................................................................... - 12 -2.5.6装上滚子后转盘的尺寸 ......................................................... - 13 -第三章 弧面分度凸轮工作曲面的设计原理和方法 ....................- 14 -3.1空间共轭曲面设计时必须满足的基本条件 .................................... - 14 -3.2坐标系的选取 .................................................................................... - 14 -3.2.1坐标系中各个方程式的确定 ................................................. - 15 -3.2.1求解凸轮工作轮廓的三维坐标值 ......................................... - 16 -3.3弧面分度凸轮的压力角 .............................................................. - 17 -3.3.1最大压力角max α及降低max α的措施 ..................................... - 18 -第四章 弧面分度凸轮机构的结构设计 ............................- 19 -4.1箱体的结构设计 ................................................................................ - 20 -4.1.1箱体结构设计原则 ................................................................. - 20 -4.1.2箱体的主要结构尺寸 ............................................................. - 20 -4.1.3设计的箱体的结构特点 ......................................................... - 21 -4.2 输出轴的设计 ................................................................................... - 21 -4.2.1轴的设计原理 ......................................................................... - 21 -4.2.2轴的结构设计 ......................................................................... - 22 -4.3分度盘的结构设计 ............................................................................ - 23 -4.4输出轴偏心套的设计图 .................................................................... - 24 -4.5轴承端盖的设计、输出支撑套 ........................................................ - 24 -第五章 弧面分度凸轮机构设计应该考虑的问题 ....................- 26 -5.1凸轮的尺寸 ........................................................................................ - 26 -5.1.1凸轮体宽度b .......................................................................... - 26 -5.1.2凸轮体最大、最小外径 ......................................................... - 26 -5.1.3凸轮轴直径 ............................................................................. - 26 -5.1.4凸脊厚度 ........................................................................................ - 27 -5.2精密的凸轮从动件 ............................................................................ - 27 -5.3润滑与磨损 ........................................................................................ - 27 -5.3.1 胶合现象 ................................................................................ - 28 -5.3.2 粘性磨损 ................................................................................ - 28 -5.3.3 成品腐蚀 ................................................................................ - 28 -5.3.4 表面疲劳 ................................................................................ - 28 -5.3.5 材料和热处理 ........................................................................ - 29 -致 谢 .......................................................- 30 -参考文献.......................................................- 31 -附录.......................................................- 32 -摘要本文简要介绍了弧面分度凸轮机构的工作原理与发展历程,并从几何学与运动学、动力学、制造、检测及误差分析等方面对弧面分度凸轮的设计过程进行了阐述,我们看到弧面分度凸轮机构具有传动平稳、分度准确、结构简单紧凑等优点, 它已被广泛用于高速高精度的自动机械中, 同时凭借自己的独特优势吸引了国内外许多学者对它进行详细地研究。
弧面分度凸轮三维建模已知设计条件:凸轮转速n=300r/min,连续旋转,从动转盘有8 工位,中心距C=180mm,载荷中等。
选择改进正弦运动规律为所设计弧面分度凸轮机构的运动规律。
参数如下:项目实例计算凸轮角速度ω1=πX 300=101T/s凸轮分度期转角β1=120°=2/3π凸轮停歇期转角θd=360°-120°=4/3π凸轮角位移θ凸轮和转盘的分度期时间∥s 0=(2"rr/3)/10-rr=1/15s凸轮和转盘停歇时间幻/s td=(2ar/10"rr)一1/15=2/15s凸轮分度廓线旋向及旋向系数P 选取左旋L,P=+1凸轮分度廓线头数日选取H=1转盘分度数,按设计要求的工位数,选定,=8转盘滚子数Z=1×8=8转盘分度期运动规律抛物线一直线一抛物线转盘分度期转位角盼/(。
) 妒,=360。
/8=45。
中心距C=180mm凸轮转速n=300r/min旋向系数P=+1分度数I=8凸轮头数H=1转盘滚子数Z=1*8=8凸轮宽度B=90分度期转角θf = 120°停歇期转角θd = 240°凸轮节圆半径rp1=96mm滚子宽度b=30mm滚子半径Rr=22mm凸轮顶弧半径rc=75.29mm我们将分别作出与滚子左面接触的一系列凸轮轮廓曲线,分度期1L、2R、2L、3R ,停歇期与滚子左右接触的轮廓曲线,然后将这些线生成曲面,最后生成实体。
1 凸轮定位环面内圆直径Di为直径的基础圆柱体打开Pro/ENGINEER,进入Pro/ENGINEER三维造型窗口,在“基础特征”工具栏上单击“拉伸”命令,选择“FRONT”面为草绘平面,绘制φ154.69的圆,并双向拉伸90mm.2 建立1L 轮廓曲线1)建立推程段轮廓面曲线①. 新建.prt 文件打开Pro/E Wildfire 三维绘图软件,新建->零件->实体,建立文件。
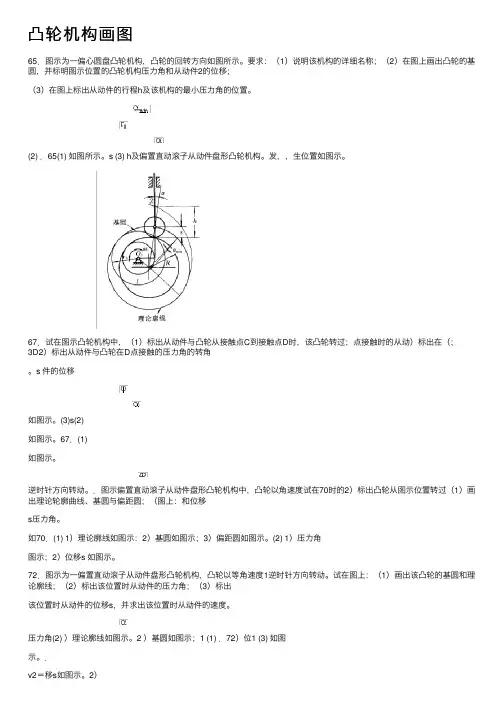
凸轮机构画图65.图⽰为⼀偏⼼圆盘凸轮机构,凸轮的回转⽅向如图所⽰。
要求:(1)说明该机构的详细名称;(2)在图上画出凸轮的基圆,并标明图⽰位置的凸轮机构压⼒⾓和从动件2的位移;(3)在图上标出从动件的⾏程h及该机构的最⼩压⼒⾓的位置。
(2) .65(1) 如图所⽰。
s (3) h及偏置直动滚⼦从动件盘形凸轮机构。
发,,⽣位置如图⽰。
67.试在图⽰凸轮机构中,(1)标出从动件与凸轮从接触点C到接触点D时,该凸轮转过;点接触时的从动)标出在(;3D2)标出从动件与凸轮在D点接触的压⼒⾓的转⾓。
s 件的位移如图⽰。
(3)s(2)如图⽰。
67.(1)如图⽰。
逆时针⽅向转动。
.图⽰偏置直动滚⼦从动件盘形凸轮机构中,凸轮以⾓速度试在70时的2)标出凸轮从图⽰位置转过(1)画出理论轮廓曲线、基圆与偏距圆;(图上:和位移s压⼒⾓。
如70.(1) 1)理论廓线如图⽰:2)基圆如图⽰;3)偏距圆如图⽰。
(2) 1)压⼒⾓图⽰;2)位移s 如图⽰。
72.图⽰为⼀偏置直动滚⼦从动件盘形凸轮机构,凸轮以等⾓速度1逆时针⽅向转动。
试在图上:(1)画出该凸轮的基圆和理论廓线;(2)标出该位置时从动件的压⼒⾓;(3)标出该位置时从动件的位移s,并求出该位置时从动件的速度。
压⼒⾓(2) )理论廓线如图⽰。
2 )基圆如图⽰;1 (1) .72)位1 (3) 如图⽰。
.v2=移s如图⽰。
2)79.图⽰的凸轮机构中,凸轮为⼀圆盘。
试在图上作出:(1)基圆;(2)图⽰位置的凸轮。
3)图⽰位置时的从动件压⼒⾓转⾓;和从动件的位移s(。
79.(1)基圆如图⽰半径为(2) 和从动件位移凸轮转⾓s如图⽰。
如图⽰。
点压⼒⾓(3) B,回转中⼼为O.在图⽰偏置直动尖顶从动件盘形凸轮机构中,凸轮为偏⼼圆盘,圆⼼为84.A。
当凸轮以逆时针⽅向等速回转时,试在图上画出:(1)该凸轮基圆(半径⽤r0 表⽰);;(3)图⽰位置时的从动件位移s;(2)图⽰位置的凸轮转⾓(4)从动件在最低位置时的压⼒⾓。
圆柱凸轮分度机构的设计计算及运动仿真圆柱凸轮分度机构是一种常见的传动机构,用于将连续运动转换为间断运动。
它由凸轮、凸轮轴、旋转体、均衡轮、从动件和驱动件等部分组成。
设计计算和运动仿真是圆柱凸轮分度机构设计过程中的重要步骤,下面将对其进行详细介绍。
设计计算是圆柱凸轮分度机构设计的关键步骤之一、首先需要确定驱动件和从动件的构型。
通常,驱动件为凸轮轴,从动件为旋转体。
然后,需要根据要求的间断角度和转速计算凸轮的几何参数,如凸轮半径、凸轮高度和凸轮轴位置。
凸轮的几何参数决定了从动件的运动特性,如加速度和速度。
计算凸轮的几何参数时,可采用凸轮的设计曲线。
设计曲线可以通过将所需的运动规律与给定凹模曲线相叠加得到。
凹模曲线是一个以分度运动为基础的曲线,其参数对凸轮的运动特性有重要影响。
凹模曲线的形状和尺寸决定了从动件在分度运动过程中的加速度和速度的变化规律。
在完成设计计算后,需要进行运动仿真来验证设计的准确性和可行性。
运动仿真可以通过使用专业的仿真软件,如ADAMS(Automatic Dynamic Analysis of Mechanical Systems)来实现。
通过建立凸轮、凸轮轴、旋转体、均衡轮、从动件和驱动件的几何模型,并设置运动和约束条件,可以模拟圆柱凸轮分度机构的运动过程。
运动仿真可以得到从动件的运动规律和性能参数,例如位置、速度和加速度的变化规律。
通过对仿真结果的分析和评估,可以判断设计的合理性,并根据需要对凸轮的几何参数进行调整和优化,以满足运动要求。
综上所述,圆柱凸轮分度机构的设计计算和运动仿真是设计过程中不可或缺的步骤。
通过设计计算和运动仿真,可以确定凸轮的几何参数,并验证设计的准确性和可行性。
这为圆柱凸轮分度机构的制造和应用提供了重要的参考依据。
文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持.
Solidworks 怎么画圆柱凸轮
首先在“上视基准面”上绘制你所要绘制的圆柱(可定直径为60)
然后,然后点击拉伸特征,拉伸所需要高度(可定高度为90)
然后点击前视基准面,在前视基准面上绘制分割线
点击完成,分割线变成灰色,分割线绘制完成。
再次点击分割线,再在标题栏中点击“插入”——“曲线”——“分割线”,然后出现任务栏,输入主要参数
类型选择“投影”;要分割的面“选圆柱表面”
点击完成。
再次点击“插入”——“曲面”——“直纹曲面”,出现直纹曲面任务栏
在任务栏中填入主要参数。
类型选择“正交于曲面”;距离可填需要深度(5mm);边线选择“分割线”。
点击,完成。
再次点击“插入”——“切除”——“加厚”,出现任务栏。
点击完成。
1文档来源为:从网络收集整理.word版本可编辑.。
·69·基于Creo 的圆柱分度凸轮三维建模刘文光 张卧波 史建国(济南职业学院,山东 济南 250103)摘要:利用Creo 对圆柱分度凸轮进行三维建模,可以先绘制凸轮展开截面线,利用包络命令将截面线缠绕到圆柱,利用扫描命令创建圆柱分度凸轮主体,然后依次创建凸轮的细节特征。
关键词:圆柱分度凸轮;Creo;三维建模;包络;扫描中图分类号:TH16 文献标志码:B 文章编号:1673-4270(2017)05-0069-05一、圆柱分度凸轮三维建模思路圆柱分度凸轮是自动机、自动线中常见的中低速间歇传动装置。
对图1所示的圆柱分度凸轮进行三维建模,可以首先绘制凸轮展开截面线,将截面线缠绕到圆柱,通过扫描的方法创建圆柱分度凸轮主体,然后依次创建孔、加强筋、倒角等细节特征[1]。
图1 圆柱分度凸轮二、基于Creo 的圆柱分度凸轮三维建模以Creo 中的mmns_part_solid 模板新建prt 零件。
(一)创建参数在 标签下选择 定义参数[2],创建类型为实数的参数D,其值为160;创建类型为实数的参数T,其值为pi*D,如图2所示。
(二)创建拉伸曲面特征选择FRONT 面为草绘平面,以RIGHT 面和TOP 面在草绘平面上的投影线的交点为圆心,草绘直径为D 的圆,完成草绘。
在 操控板选择 设定拉伸为曲面,从草绘平面以指定的深度值拉伸76,生成图3所示的拉伸1。
(三)创建基准面过拉伸1的轴线,与TOP 面成60°角生成基准面DTM1;与拉伸1相切,与DTM1垂直生成基准面DTM2,如图4所示。
图2 参数D 和参数T(四)创建圆柱分度凸轮展开截面线选择DTM2为草绘平面,草绘图5所示的展开截面线。
两条水平线的长度分别为T*236/360和作者简介:刘文光(1983—),男,山东济南人,济南职业学院机械制造学院讲师。
基金项目:本文系2015年度山东省高等学校科研计划项目“基于计算机辅助技术的传送机构特性分析及设计研究”(项 目编号:J15LB53)的阶段性研究成果。
% 圆柱分度凸轮机构设计计算和运动分析% 函数文件1:绘制凸轮机构运动曲线(zxjs_ydxt.m)% 函数文件2:整理圆柱分度凸轮轮廓曲面三维坐标数据(zxjs_3Dzb.m)disp ' 用键盘输入已知条件:'n=input(' 凸轮转速(r/min) n = ');disp ' * 机构中心距C:凸轮轴线z1到转盘轴线z2的距离'C=input(' 机构中心距(mm) C = ');disp ' * 机构基距A:凸轮轴线z1到转盘基准端面O2x2y2的距离'A=input(' 机构基距(mm) A = ');disp ' * 选择凸轮头数H=1、2、3、4:'H=input(' 凸轮头数H = ');disp ' * 选择凸轮分度期转角theta_f=120~240度:'theta_f=input(' 凸轮分度期转角(度) theta_f = ');disp ' * 选择转盘分度数(按照工作机械工位要求)'I=input(' 转盘分度数I = ');disp ' * 选择凸轮分度廓线旋向(左旋L、右旋R):'LXX=input(' 凸轮分度廓线旋向LXX = ','s');% 1-圆柱分度凸轮机构运动分析% 凸轮角速度omega_1=pi*n/30;% 转盘滚子数z=H*I;% 凸轮停歇期转角theta_d=360-theta_f;% 转盘分度期转位角phi_f=360/I;% 机构分度期时间t_f和停歇期时间t_dhd=pi/180.0; % 角度转换为弧度的系数t_f=theta_f*hd/omega_1;t_d=theta_d*hd/omega_1;% 机构动停比k和运动系数tauk=t_f/t_d;tau=t_f/(t_f+t_d);% 凸轮分度廓线旋向系数if LXX=='L'p=1;elseif LXX=='R'p=-1;enddisp '======== 圆柱分度凸轮机构基本数据========'fprintf(' 凸轮转速n = %3.4f r/min \n',n)fprintf(' 机构中心距 C = %3.4f mm \n',C)fprintf(' 机构基距 A = %3.4f mm \n',A)fprintf(' 凸轮头数H = %3.0f \n',H)fprintf(' 凸轮分度廓线旋向LXX = %s \n',LXX)fprintf(' 转盘分度数I = %3.0f \n',I)fprintf(' 转盘滚子数z = %3.0f \n',z)fprintf(' 凸轮角速度omega_1 = %3.4f 1/s \n',omega_1)fprintf(' 凸轮分度期转角theta_f = %3.4f 度\n',theta_f)fprintf(' 凸轮停歇期转角theta_d = %3.4f 度\n',theta_d)fprintf(' 转盘分度期转角phi_f = %3.4f 度\n',phi_f)fprintf(' 机构分度期时间t_f = %3.4f s \n',t_f)fprintf(' 机构停歇期时间t_d = %3.4f s \n',t_d)fprintf(' 机构动停比k = %3.4f \n',k)fprintf(' 机构运动系数tau = %3.4f \n',tau)% 计算凸轮机构运动参数bc_theta=1; % 转角分度步长1~2度% 转盘分度期采用正弦加速运动规律i_zxjs=0;for theta=0:bc_theta:theta_fi_zxjs=i_zxjs+1;phi_2=phi_f*hd*(theta/theta_f-sin(2*pi*theta/theta_f)/(2*pi));omega_2=omega_1*phi_f/theta_f*(1-cos(2*pi*theta/theta_f));epsilon_2=omega_1^2*2*pi*phi_f/theta_f^2*sin(2*pi*theta/theta_f);zeta_2=omega_1^3*4*pi^2*phi_f/theta_f^3*cos(2*pi*theta/theta_f);omega_2_1=omega_2/omega_1;epsilon_2_1=epsilon_2/omega_1^2;zxjs(i_zxjs,:)=[theta phi_2 omega_2 epsilon_2 zeta_2 omega_2_1 epsilon_2_1];endfprintf(' 正弦加速运动参数数组行数i_zxjs = %3.0f \n',i_zxjs)% 输出圆柱分度凸轮机构运动参数[' 凸轮转角',' 转盘角位移',' 角速度',' 角加速度',' 跃度',' 角速度比',' 角加速度比'][zxjs(:,1),zxjs(:,2)/hd,zxjs(:,3),zxjs(:,4),zxjs(:,5),zxjs(:,6),zxjs(:,7)]disp ' 圆柱分度凸轮机构运动参数的最大值'Vm=2.00;Am=6.28;Jm=39.5; % 正弦加速运动加速运动部分的特征值omega_2_1_max=Vm*phi_f/theta_f;omega_2_max=Vm*phi_f/theta_f*omega_1;epsilon_2_max=Am*phi_f/theta_f^2*omega_1^2;zeta_2_max=Jm*phi_f/theta_f^3*omega_1^3;fprintf(' 最大角速度比omega_2_1_max = %3.4f \n',omega_2_1_max);fprintf(' 最大角速度omega_2_max = %3.4f \n',omega_2_max);fprintf(' 最大角加速度epsilon_2_max = %3.4f \n',epsilon_2_max);fprintf(' 最大跃度zeta_2_max = %3.4f \n',zeta_2_max);% 绘制凸轮机构运动曲线(调用正弦加速绘图M文件:zxjs_ydxt.m)zxjs_ydxt(zxjs,hd,theta_f)% 导出fig图形命令:openfig('YZ200-H1-I16-R_ydxt');% 2-圆柱分度凸轮机构几何尺寸计算disp ' 圆柱分度凸轮机构许用压力角一般为30~40度'alpha_p=input(' 确定许用压力角(度) alpha_p = ');% 转盘节圆半径Rp_2j=2*C/(1+cos(phi_f*hd/2)); % 转盘节圆半径计算值Rp_2=round(Rp_2j+0.5); % 对转盘节圆半径计算值四舍五入圆整% 凸轮节圆半径Rp_1j=Vm*Rp_2*phi_f/theta_f/tan(alpha_p*hd); % 凸轮节圆半径计算值fprintf(' 凸轮节圆半径计算值Rp_1j = %3.4f mm \n',Rp_1j);Rp_1=input(' 确定凸轮节圆半径(mm) Rp_1 = ');% 转盘滚子中心角phi_z=360/z;% 转盘滚子半径(fix是朝0方向取整函数)fprintf(' 转盘滚子半径最小值Rrmin = %3.4f mm \n',fix(0.4*Rp_2*sin(pi/z)));fprintf(' 转盘滚子半径最大值Rrmax = %3.4f mm \n',fix(0.6*Rp_2*sin(pi/z)));Rr=input(' 确定滚子半径(mm) Rr = ');% 转盘滚子宽度fprintf(' 转盘滚子宽度最小值bmin = %3.4f mm \n',fix(Rr));fprintf(' 转盘滚子宽度最大值bmax = %3.4f mm \n',fix(1.4*Rr));b=input(' 确定滚子宽度(mm) b = ');% 转盘滚子与凸轮槽底之间的间隙fprintf(' 转盘滚子与凸轮槽底间隙的最小值emin = %3.4f mm \n',fix(0.2*b));fprintf(' 转盘滚子与凸轮槽底间隙的最大值emax = %3.4f mm \n',fix(0.4*b));disp ' 转盘滚子与凸轮槽底至少取间隙值 e = 5~10 mm'e=input(' 确定滚子与凸轮槽底的间隙(mm) e = ');% 凸轮定位环面的径向深度h=b+e;% 凸轮定位环面的外圆直径Do=2*Rp_1+b;% 凸轮定位环面的内圆直径Di=Do-2*h;% 凸轮宽度fprintf(' 凸轮宽度的最小值Lmin = %3.4f mm \n',fix(2*Rp_2*sin(phi_f*hd/2)));fprintf(' 凸轮宽度的最大值Lmax = %3.4f mm \n',fix(2*Rp_2*sin(phi_f*hd/2)+2*Rr)); L=input(' 确定凸轮宽度(mm) L = ');% 转盘的外圆直径fprintf(' 转盘外圆直径的最小值D_2min = %3.4f mm \n',2*(Rp_2+Rr));D_2=input(' 确定转盘外圆直径(mm) D_2 = ');% 转盘基准端面到滚子宽度中点的轴向距离rG=A-Rp_1;% 转盘基准端面到滚子上端面的轴向距离rO=rG-b/2;% 转盘基准端面到滚子下端面的轴向距离re=rG+b/2;% 输出圆柱分度凸轮机构几何尺寸计算结果disp ' ======== 圆柱分度凸轮机构几何尺寸========'fprintf(' 许用压力角alpha_p = %3.4f 度\n',alpha_p); fprintf(' 凸轮节圆半径Rp_1 = %3.4f mm \n',Rp_1); fprintf(' 转盘节圆半径Rp_2 = %3.4f mm \n',Rp_2); fprintf(' 转盘滚子中心角phi_z = %3.4f 度\n',phi_z); fprintf(' 滚子半径Rr = %3.4f mm \n',Rr);fprintf(' 滚子宽度 b = %3.4f mm \n',b);fprintf(' 转盘滚子与凸轮槽底间隙 e = %3.4f mm \n',e);fprintf(' 凸轮定位环面的径向深度h = %3.4f mm \n',h);fprintf(' 凸轮定位环面的外圆直径Do = %3.4f mm \n',Do); fprintf(' 凸轮定位环面的内圆直径Di = %3.4f mm \n',Di); fprintf(' 凸轮宽度L = %3.4f mm \n',L);fprintf(' 转盘外圆直径D_2 = %3.4f mm \n',D_2); fprintf(' 转盘基准端面到滚子上端面的轴向距离rO = %3.4f mm \n',rO); fprintf(' 转盘基准端面到滚子宽度中点轴向距离rG = %3.4f mm \n',rG); fprintf(' 转盘基准端面到滚子上端面的轴向距离re = %3.4f mm \n',re);% 3-圆柱分度凸轮机构压力角的计算% 1#、2#、3#滚子的起始位置角(单位:度)phi0_1=-p*0.5*phi_z;phi0_2=p*0.5*phi_z;phi0_3=p*1.5*phi_z;% 计算1#、2#、3#滚子位置角(单位:度)phi=zeros(i_zxjs,3); % 变量初始化phi1=phi0_1-p.*zxjs(:,2); % zxjs(:,2)存储转盘角位移phi_2 phi2=phi0_2-p.*zxjs(:,2);phi3=phi0_3-p.*zxjs(:,2);phi=[phi1 phi2 phi3]; % 行-theta,列-滚子位置角% 转盘节圆半径处的压力角% 机构的角速度比(omega_2/omega_1)—数组zxjs(:,6)alpha_fz=Rp_2.*zxjs(:,6); % 计算压力角的分子数组alpha_fm_1=C-Rp_2.*cos(phi(:,1)); % 计算1#滚子压力角的分母数组alpha_1=atan2(alpha_fz,alpha_fm_1);alpha_fm_2=C-Rp_2.*cos(phi(:,2)); % 计算2#滚子压力角的分母数组alpha_2=atan2(alpha_fz,alpha_fm_2);alpha_fm_3=C-Rp_2.*cos(phi(:,3)); % 计算3#滚子压力角的分母数组alpha_3=atan2(alpha_fz,alpha_fm_3);% 绘制转盘节圆半径处与1#、2#、3#滚子相啮合的压力角变化线图figure(2);subplot(3,1,1);plot(zxjs(:,1),alpha_1/hd);title('转盘节圆半径处与1号滚子相啮合的压力角变化线图');grid;xlabel('凸轮转角\theta (^。