第六章 异方差与序列相关3
- 格式:pdf
- 大小:83.01 KB
- 文档页数:4
计量经济学第六章自相关自相关是计量经济学中一种重要的现象,它指的是一个变量与其自己在过去时间点上的相关性。
自相关在实证研究中十分常见,对经济学家来说,了解和掌握自相关性质是至关重要的。
1. 引言自相关作为计量经济学的一项基础概念,是经济学研究中不可或缺的一个重要方法。
自相关性的存在通常会引起回归结果的偏误,而忽略自相关性可能导致估计不准确的结果。
因此,探讨自相关性的性质和应对方法是计量经济学的重点之一。
2. 自相关的定义和表示自相关是指一个变量与其自身在过去时间点上的相关性。
假设我们有一个时间序列数据集,其中变量yt表示一个时间点上的观测值,t表示时间索引。
自相关系数可以通过计算观测值yt与其在过去某一时间点上的观测值yt-k(k为时间滞后期数)的相关性来得到。
数学上,自相关系数可以用公式表示为:ρ(k) = Cov(yt, yt-k) / (σ(yt) * σ(yt-k))其中,ρ(k)表示第k期的自相关系数,Cov表示协方差,σ表示标准差。
3. 自相关性的性质自相关性具有以下几个性质:3.1 一阶自相关性一阶自相关性是指变量值yt与前一期的观测值yt-1之间的相关性。
一阶自相关系数ρ(1)通常用来检验时间序列数据是否存在自相关性。
若ρ(1)大于零且显著,则表明存在正的一阶自相关性;若ρ(1)小于零且显著,则表明存在负的一阶自相关性。
3.2 高阶自相关性除了一阶自相关性,时间序列数据还可能存在高阶自相关性。
高阶自相关性是指变量值yt与过去第k期的观测值yt-k之间的相关性。
通过计算不同滞后期的自相关系数ρ(k),可以了解数据在不同时间跨度上的自相关性情况。
3.3 异方差自相关性异方差自相关性是指时间序列数据中的方差不仅与自身相关,还与过去观测值的相关性有关。
异方差自相关性可能导致在回归分析中的标准误差失效,从而产生无效的回归结果。
因此,在处理存在异方差自相关性的数据时要采取合适的修正方法。
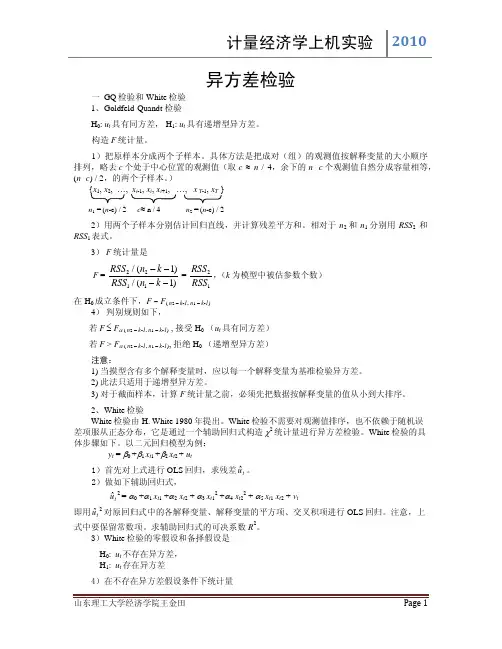
4. 自相关性的检验方法在实证研究中,经济学家通常使用多种方法来检验数据中的自相关性,常用的方法包括:4.1 Durbin-Watson检验Durbin-Watson检验是一种常用的检验自相关性的方法,其基本思想是通过检验误差项的相关性来判断自相关是否存在。
回归分析是一种常用的统计分析方法,用于研究自变量与因变量之间的关系。
然而,在实际应用中,由于数据存在序列相关性,回归分析的结果可能会产生偏误。
因此,如何处理序列相关问题成为回归分析中的关键技巧之一。
序列相关性是指时间序列数据中相邻观测值之间存在相关关系的情况。
在回归分析中,如果自变量或因变量存在序列相关性,就会导致回归系数估计值的偏误,从而影响模型的准确性和可靠性。
因此,处理序列相关问题对于回归分析的结果具有重要意义。
首先,我们需要了解序列相关性的特点和影响。
序列相关性通常表现为连续时间点的观测值之间存在一定的相关关系,例如自相关或滞后相关。
这种相关性会导致回归模型的残差项之间存在相关性,从而违反了回归分析的基本假设,影响了参数估计的准确性。
因此,处理序列相关问题是回归分析中必不可少的一环。
接下来,我们将讨论一些处理序列相关问题的常用技巧。
首先,可以通过时间序列数据的平稳化处理来消除序列相关性。
平稳化处理的方法包括差分、对数变换和季节性调整等,可以有效地降低数据的序列相关性,使其符合回归模型的基本假设。
其次,可以引入滞后变量或其他相关变量来控制序列相关性。
通过引入滞后自变量或滞后因变量,可以有效地消除序列相关性对回归模型的影响。
此外,还可以引入其他相关变量来控制序列相关性,从而提高回归模型的准确性和稳定性。
此外,还可以使用时间序列模型来处理序列相关问题。
时间序列模型是一种专门用于处理序列相关性的统计模型,包括自回归模型、移动平均模型和ARMA模型等。
通过建立时间序列模型,可以更准确地捕捉数据中的序列相关性,从而提高回归分析的准确性和可靠性。
最后,还可以通过异方差调整来处理序列相关问题。
异方差是指随着自变量或因变量的变化,数据的方差也在发生变化的情况。
通过对数据进行异方差调整,可以有效地消除序列相关性对回归分析的影响,从而提高模型的稳定性和可靠性。
综上所述,处理序列相关问题是回归分析中的重要技巧之一。
异方差性和序列相关性对OLS估计结果有什么影响如何进行修正在经济学和统计学中,最小二乘法(OLS)是一种常用的回归分析方法。
然而,OLS方法在某些情况下可能会受到异方差性和序列相关性的影响,从而导致估计结果的偏差和无效性。
本文将讨论异方差性和序列相关性对OLS估计结果的影响,并介绍修正方法。
一、异方差性对OLS估计结果的影响异方差性指的是误差项方差在自变量的不同取值下存在差异。
当存在异方差性时,OLS估计量的标准误会被低估或高估,导致假设检验的结果出现错误。
具体影响主要包括:1. 系数估计的无偏性:异方差性可能导致OLS估计量的偏差,即估计结果的期望值不等于真实参数值。
2. 假设检验的错误:异方差性导致标准误的不准确估计,从而使得假设检验的结果可能出现错误,无法得出正确的统计结论。
3. 置信区间的宽度:异方差性可能使得OLS估计量的置信区间变得更宽,从而降低了估计结果的准确性。
二、序列相关性对OLS估计结果的影响序列相关性指的是误差项间存在相关性,即误差项之间不是独立同分布的。
当存在序列相关性时,OLS估计量的方差会增加,进而导致估计结果的显著性和效率下降。
具体影响主要包括:1. 系数估计的无效性:序列相关性可能导致OLS估计量的无效性,即估计结果的方差很大,不稳定,使得估计结果失去实际经济意义。
2. 假设检验的错误:序列相关性违背OLS的基本假设,使得OLS估计结果在统计意义上不可靠,从而导致假设检验的结果出现错误。
3. 预测精度的下降:序列相关性可能使得OLS估计结果在未来值的预测上失去准确性,对未来的经济决策产生不良影响。
三、修正方法针对异方差性和序列相关性对OLS估计结果的影响,有多种修正方法可供选择,其中较为常用的方法包括:1. 加权最小二乘法(Weighted Least Squares, WLS):通过对残差项引入合适的权重来修正异方差性问题,使得OLS估计量更加准确有效。
2. 广义最小二乘法(Generalized Least Squares, GLS):在存在序列相关性的情况下,通过考虑误差项之间的相关关系,以及对残差项引入权重来进行修正,提高OLS估计结果的有效性和准确性。
异方差性和序列相关性在时间序列模型和面板数据模型中的处理方法有何不同在时间序列模型和面板数据模型中,异方差性和序列相关性是常见的数据特征。
它们的存在对模型的准确性和鲁棒性有着重要影响,因此需要采取不同的处理方法进行应对。
本文将介绍异方差性和序列相关性在时间序列模型和面板数据模型中的处理方法的不同之处。
一、时间序列模型中的异方差性处理方法时间序列模型是对单一变量随时间变化的模型,如ARIMA模型、GARCH模型等。
在时间序列模型中,异方差性通常表现为随时间变化的方差,并且可能导致模型结果的不准确性。
1. 条件异方差模型最常见的处理异方差性方法之一是采用条件异方差模型,如ARCH模型、GARCH模型等。
这些模型可以通过引入变量来描述方差的变化,并且能够更准确地估计模型参数。
2. 转换变量另一种常见的方法是通过对变量进行转换来减小或消除异方差性。
常用的转换方法包括对数转换、差分变换等。
这些转换可以将异方差性转换为方差齐性,从而提高模型的准确性。
3. 加权最小二乘法加权最小二乘法是一种适应性加权的回归方法,可以通过加权因子对不同时间点的观测值进行不同程度的调整,从而降低异方差性对模型结果的影响。
二、面板数据模型中的序列相关性处理方法面板数据模型是对多个个体在不同时间点上观测到的数据进行建模,如固定效应模型、随机效应模型等。
在面板数据模型中,序列相关性可能存在于个体之间或个体内部,对模型估计和推断都具有重要影响。
1. 面板数据单位根检验面板数据单位根检验可以判断变量是否存在序列相关性。
常用的面板数据单位根检验方法有Levin-Lin-Chu(LLC)检验、Ng-Perron(NP)检验等。
如果变量存在单位根,说明存在序列相关性,需要进一步处理。
2. 区分组间和组内相关性面板数据模型中的序列相关性可以分为组间相关性和组内相关性。
对于组间相关性,可以采用固定效应模型进行估计;对于组内相关性,可以采用随机效应模型进行估计。
第一章导论计量经济学定义:计量经济学(Econometrics)是一门应用数学、统计学和经济理论来分析、估计和检验经济现象与理论的科学。
通过使用统计数据和经济模型,计量经济学试图量化经济关系,以更好地理解经济变量之间的相互作用。
研究的问题(相关关系):计量经济学的目的是研究经济变量之间的关系,例如:1. 消费与收入的关系。
2. 教育与工资的关系。
3. 利率与投资的关系。
第二章 OLS (普通最小二乘法):OLS 是一种用于估计线性回归模型中未知参数的方法。
它通过最小化误差平方和来找到回归线。
在一元线性回归中,我们通常使用普通最小二乘法(OLS)来估计模型参数。
对于模型 Y = α + βX + ε,我们可以使用以下公式来计算α和β:β= Σ( (X - mean(X)) (Y - mean(Y)) ) / Σ( (X - mean(X))^2 ) α̂ = mean(Y) - β̂ * mean(X)这里,mea n(X) 是 X 变量的平均值(即ΣX/n),mean(Y) 是 Y 变量的平均值(即ΣY/n)。
在这些公式中,mean 表示求平均值。
Σ 表示对所有数据点求和,n 是样本大小。
这里α_hat 是截距的估计值,β_hat 是斜率的估计值。
结论及推论:1. 在高斯马尔可夫假设下,OLS 估计量是最佳线性无偏估计量(BLUE)。
2. 当误差项的方差是常数时,OLS 估计量是有效的。
3. 如果模型是正确规范的,并且误差项是独立且同分布的,那么 OLS 估计量是一致的。
4. 如果误差项与解释变量相关,或者存在遗漏变量,那么 OLS 估计量可能是有偏的。
5. OLS 提供了估计的标准误差、t 统计量和其他统计量,这些可以用于进行假设检验和构建置信区间。
第三章一元回归:(1)总函、样函:总函数和样本函数是线性回归模型的两种表现形式。
总函数(总体函数)表示整体样本的关系,一般形式为Y = β0 + β1X + ε。
第三节 广义最小二乘法
Y X βε=+,1(,,)'n εεε=",()0E ε=
ε的方差协方差矩阵为:
211212212()()()(')()()()n n n n E E E E E E E εεεεεεεσεεεεε⎛⎞⎜⎟
==⎜⎟⎜⎟⎝⎠"##%#"Ω
其中Ω为n 的实对称矩阵。
n ×若n I Ω=,则满足古典假定。
2(')n E εεσ=I 若n I Ω≠,则不满足古典假定,我们称为非球型扰动。
特别的:
1)2112222220 0 0 0000 0 0 0 0 0 n n σωωσσσωσ⎛⎞⎛⎞
⎜⎟⎜⎟⎜
⎟⎜⎟Ω==⎜⎟⎜⎟⎜⎟⎜⎟⎟⎜⎠⎝⎠⎝""""####%##%""为异方差的情形。
2)为一阶自回归形式的自相关情形。
12212
11T T T ρ
ρσσρρ−−−⎛⎞
⎜
⎟
Ω=⎜⎜⎟⎝⎠
"#
#
%#"⎟
一、广义最小二乘法
思想:对原模型进行适当的变换(从Ω出发)将扰动项的方差协方差矩阵化成2n I σ以满足古典假定。
做法:由于Ω对称且正定,则存在一个非奇异的n n ×矩阵,使得
,于是P 1'P P −Ω=1(')P P −Ω= 对模型进行变换:
Y X βε=+,用左乘方程两边得:P PY PX P βε=+
令,*Y PY =*X PX =,*P εε=则模型变为:**Y X *βε=+;
**22
1
2
(')[()'](')'(' (')'n
E E P P PE P P P P P P I εεεεεεσσσ−=====)P Ω
所以变换后模型的扰动项满足古典线性回归模型的假定。
用OLS 估计新方程得:
**1**11111ˆ(')'[()'()]()'()['(')]'(') [']'GLS X X X Y PX PX PX PY X P P X X P P Y X X X Y
β−−−−−−====ΩΩˆGLS
β为广义最小二乘估计量。
2**121ˆ()(')(')GLS
Var X X X X βσσ−−==Ω1−
二、异方差、自相关时模型的GLS 估计
1)I Ω=时,1ˆˆ(')'GLS OLS
X X X Y ββ−== 2)12 0 000 0 0 n ωωω⎛⎞⎜⎟⎜
⎟Ω=⎜⎟⎜⎟⎠⎝""###%"时,1222 0 000 (') 0 0 n E ωωεεσσω⎛⎞
⎜⎟
⎜⎟=Ω=⎜⎟⎜⎟
⎠⎝
""###%" 1
211
1
1 0 000 0 0 n ωω−⎛⎞⎜⎟⎜⎟Ω=⎜
⎟⎜⎟⎟⎜⎠⎝""###%"
,变换矩阵为: 000 0 0 P ⎞
⎟⎜⎟=⎜⎟⎜⎜⎝""###%" 111'1ˆ[']'[][]GLS
i i i i i i i
i
X X X Y w X X w X Y β−−−−=ΩΩ=∑∑, 其中1
i i
w ω=
,即为WLS 估计。
若Ω已知,可以直接进行GLS (即为WLS )估计。
若Ω未知,需要先估计权重1
i i
w ω=,有了Ω的估计ˆΩ
后,可以做GLS 估计。
3)时,模型存在一阶自相关,此时 1212
1
1T T T ρ
ρσρρ−−−⎛⎞
⎜
⎟
Ω=⎜⎜⎟⎝
⎠
"#
#
%#"⎟2122
1
00
01001
010010000
1ρρρρρρρρ−−⎛⎞
⎜⎟
−+−⎜⎟⎜⎟Ω=−+−⎜
⎟
⎜⎟⎜⎟−⎝⎠
""""
""#""""000
变换矩阵为:
00001
00000
1
00
00001P ρρρ⎞⎟−⎜⎟⎜⎟=−⎜
⎟
⎜⎟
⎜⎟
−⎝⎠"""
"""#""""00 此时,2112
1
'(1),'1P P P P ρρ
−−=−ΩΩ=
−, PY PX P βε=+具体化为:
11
**212111,T T T
T Y Y X X Y X Y Y X X ρρρρ−−⎛⎞⎛⎜⎟⎜−−⎜⎟⎜==⎜⎟⎜⎜⎟⎜⎜⎟⎜−−⎝⎠⎝##
⎞
⎟⎟
⎟⎟⎟
⎠, 从前的广义差分变换相当于忽略了第一项。
GLS 估计:111ˆ[']'GLS
X X X Y β−−−=ΩΩ。
若Ω已知,我们可以直接对和Y X 进行变换,然后进行OLS 估计。
若Ω未知,我们则先要对Ω进行估计,估计的方法即为前面关于自相关修正中的说明。
说明:一般地,对于非球型扰动来说,Ω都是未知的。
若要进行GLS 我
们先得对Ω进行估计得到,再将ˆΩ
ˆΩ代入GLS 估计中去。
我们称这种做法为可行的广义最小二乘估计(FGLS 估计):
111ˆˆˆ[']'FGLS X X X Y β−−−=ΩΩ
广义最小二乘估计量的有效性
ˆGLS
β是一个BLUE (best linear unbiased estimator )估计量. **1**11111111111ˆ(')'[()'()]()'()['(')]'(') [']'[']'()[']'GLS X X X Y PX PX PX PY X P P X X P P Y X X X Y X X X X X X X ββεβ−−−−−−−−−−−−====ΩΩ=ΩΩ+=+ΩΩ111ˆ()[']'()GLS E X X X E ε
ββεβ−−−=+ΩΩ= 2**121ˆ()(')(')GLS
Var X X X X βσσ−−==Ω1−
存在非球形扰动时,
1ˆ(')'OLS X X X Y β−=,21ˆ()(')'(')OLS Var X X X X X X βσ1−−=Ω 可以证明ˆOLS β不如ˆGLS β有效。
证明: ˆˆ()()GLS OLS
Var Var ββ≤211111*********
[(')'(')'][(')'(')']'
(')'(')(')ˆˆ()()OLS
GLS
X X X X X X X X X X X X X X X X X X X X Var Var σσσβ
β−−−−−−−−−−−−ΩΩΩ−ΩΩ=Ω−Ω=−−0
因为,Ω对称且正定,所以ˆˆ()()OLS GLS
Var Var ββ−≥。