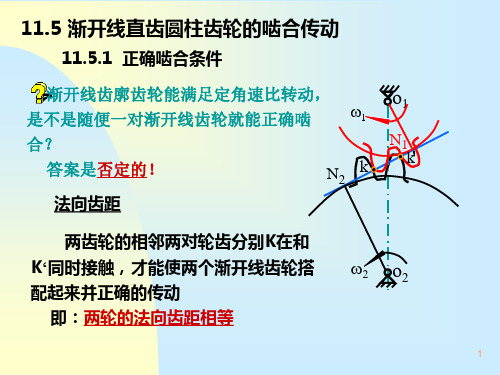
重庆大学硕士课程——齿轮啮合原理
- 格式:doc
- 大小:4.23 MB
- 文档页数:19
新型齿轮啮合原理陶永锋(机械与汽车工程学院指导教师:刘鹄然)第一章绪论1.1概述本课题从实际生产中的一些冶金重载齿轮齿面发生严重塑性变形中得到启发,认为必然存在最适合齿轮接触强度和弯曲强度的齿形,并分析了这种齿形的形成原理。
经缜密分析和深入研究,初步认为这是等共轭曲率高阶接触的齿形,本课题有可能发展成一门新的学科或分支:齿轮仿形原理。
类似于仿生学但模仿的却是没有生命的东西.并扩展到等共轭曲率啮合的多种应用形式: 内啮合,齿轮与齿条,斜齿圆柱齿轮,斜齿轮与斜齿条,直齿圆锥齿轮, 弧齿圆锥齿轮, 面齿轮,等共轭曲率蜗轮蜗杆。
证明等共轭曲率高阶接触啮合的实现条件.等共轭曲率啮合的媒介齿条的齿廓的构成.与此适应创立仿射啮合理论——活动标形新形式.导出等共轭曲率啮合齿面啮合点邻域间隙的4阶参数.高阶切触的齿面接触应力计算,高阶接触齿面的流体动压润滑和弹性流体动压润滑计算.本课题具有较大学术价值。
如成功对齿轮传动具有里程碑式意义,是本人指导老师的前导师蔡春源老先生多年夙愿和临终嘱托。
本课题的目的旨在提出一类等共轭曲率高阶接触啮合的传动。
1984年,本人指导老师与东北大学蔡春源,鄂中凯,何德芳等长期从事齿轮强度研究的著名专家研究生同窗陈良玉在鞍钢初轧厂调研时,发现主减速器齿轮在经长期运转后齿面形成如图1所示形状,自然形成类似于双圆弧齿形但又不完全同于双圆弧齿轮,还有很多齿轮出现类似的情况,即意识到这种齿形有可能是一种最自然的齿形(或称稳态齿形)。
这种现象有可能用梅兰塑性势理论和普朗特-路埃斯以及列维-密赛思流动法则来解释:以密赛思屈服函数作势函数建立流动法则,塑性应变增量的分量所组成的向量在应力点沿屈服面的外法线。
但正如仿照磨损后的轧辊,却并不刻意的去研究磨损过程本身。
本课题并不刻意的去研究齿面塑性流动本身。
经大量收集资料,测量和计算,并经缜密分析和深入研究,初步认为这是等共轭曲率的齿形。
接触和弯曲强度都很高,极易形成动压油膜。
硕士学位课程考试试卷考试科目:齿轮啮合原理考生姓名:考生学号:学院:专业:考生成绩:任课老师(签名)考试日期:2012 年6月日至月日一、基本概念(每题4分,共计32分)1.解释齿轮的瞬心线?答:两个构件1和2相对于一个固定参考标架f做平面运动(如图1),在固定坐标系中,两构件在某点的相对速度等于零,该点就是瞬时回转中心I,而瞬时回转中心I在坐标系(i =1,2)中的轨迹就是齿轮的瞬心线。
图1.1即绕转动时,点I(它沿运动,或处于静止状态)会描绘出瞬心线传动比,当是常数时,两瞬心线是半径分别为和的两个圆,当不是常数时,瞬心线是非圆形曲线,成封闭的或不封闭的。
2.解释齿轮的瞬时回转轴?答:瞬时回转轴是齿轮对另一齿轮相对运动中的角速度的作用线。
如图1.2所示瞬时回转轴(OI)是齿轮1对齿轮2(或齿轮2对齿轮1)相对运动中的角速度的作用线,有同理图1.23.解释齿轮的瞬轴面?答:齿轮的瞬轴面是指瞬时回转轴在与回转齿轮刚性固接的动参考标架中的轨迹。
在两相交轴之间的回转运动进行传递的情况下,瞬轴面是两个顶角为和的圆锥(如图1.3).这两个圆锥称作节锥,它们的切触线是OI,并且其相对运动是纯滚动——绕OI运动。
当节锥2处于静止时,角速度表示绕OI转动的节锥1的角速度。
图1.34.解释平面曲线的曲率?答:如图1.4,在平面曲线上的两点M、N,当点N趋近于点M时,比值的极限称为平面曲线在点M处的曲率(记为K)。
即。
图1.45.解释共轭齿形?答:共轭齿形是两齿轮在接触点处的公法线与回转中心线相交(如图1.5),并且该线分为和两线段有如下的关系式:=()这里,;(1)对于非圆齿形是规定的齿轮传动比函数,(2)对于圆形齿轮是常数。
图1.5常用共轭齿形是渐开线齿形。
6.解释啮合面?答:啮合面是表示在与机架刚性固接的固定坐标系中的瞬时接触线族。
啮合面用如下方程表示:式中,描述从到的坐标变换。
7.解释齿廓渐屈线?答:如图1.6所示,假定平面曲线I是给定的。

齿轮啮合原理齿轮是一种常见的机械传动装置,其啮合原理是指两个或多个齿轮之间通过齿与齿之间的啮合来传递动力和运动的原理。
齿轮传动具有传动比稳定、传动效率高、传动平稳等优点,因此在各种机械设备中得到广泛应用。
本文将从齿轮的基本概念、齿轮的分类、齿轮的啮合原理等方面来详细介绍齿轮啮合原理。
首先,我们来了解一下齿轮的基本概念。
齿轮是由圆柱形或锥形的齿轮齿条组成的,它们通过啮合来传递动力和运动。
齿轮一般由齿轮轮毂和齿组成,齿轮轮毂是齿轮的中心部分,齿是齿轮的外部部分,齿轮的啮合就是指两个或多个齿轮的齿之间的啮合。
其次,齿轮按照其外形和结构可以分为直齿轮、斜齿轮、锥齿轮等不同类型。
直齿轮是最常见的一种齿轮,其齿轮齿条与齿轮轴线平行,适用于传递平行轴间的运动和动力。
斜齿轮的齿轮齿条与齿轮轴线呈一定夹角,适用于传递非平行轴间的运动和动力。
锥齿轮的齿轮轮毂呈圆锥形,适用于传递轴线相交的运动和动力。
最后,我们来详细介绍一下齿轮的啮合原理。
齿轮的啮合原理是指两个或多个齿轮之间通过齿与齿之间的啮合来传递动力和运动。
当两个齿轮啮合时,它们之间会产生一定的啮合力,这种啮合力会使齿轮产生转动,从而传递动力和运动。
齿轮的啮合原理是基于齿轮齿条的啮合,通过齿与齿之间的啮合来实现动力和运动的传递。
总之,齿轮啮合原理是一种常见的机械传动原理,它通过齿与齿之间的啮合来传递动力和运动。
齿轮按照其外形和结构可以分为直齿轮、斜齿轮、锥齿轮等不同类型,不同类型的齿轮适用于不同的传动场合。
通过了解齿轮的基本概念、齿轮的分类、齿轮的啮合原理等方面的知识,可以更好地理解和应用齿轮传动装置。
希望本文对大家有所帮助,谢谢阅读。

齿轮啮合课程设计一、教学目标通过本章节的学习,学生将能够:1.掌握齿轮啮合的基本原理和概念。
2.了解不同类型的齿轮啮合及其应用。
3.能够计算和分析齿轮啮合的传动比和转速关系。
4.能够运用齿轮啮合的知识解决实际工程问题。
二、教学内容本章节的教学内容主要包括以下几个部分:1.齿轮啮合的基本原理和概念,包括齿轮的定义、齿形、齿数等。
2.不同类型的齿轮啮合,包括外啮合、内啮合和交错啮合等。
3.齿轮啮合的传动比和转速关系的计算和分析。
4.齿轮啮合在实际工程中的应用案例。
三、教学方法为了激发学生的学习兴趣和主动性,将采用多种教学方法进行教学,包括:1.讲授法:通过讲解齿轮啮合的基本原理和概念,引导学生理解和掌握相关知识。
2.讨论法:通过小组讨论,让学生探讨不同类型的齿轮啮合及其应用,培养学生的思考和表达能力。
3.案例分析法:通过分析实际工程案例,让学生了解齿轮啮合在工程中的应用,提高学生的实际问题解决能力。
4.实验法:通过实验操作,让学生亲自观察和体验齿轮啮合的过程,增强学生的实践操作能力。
四、教学资源为了支持教学内容和教学方法的实施,将选择和准备以下教学资源:1.教材:选用权威的齿轮啮合教材,为学生提供系统的理论知识和实例分析。
2.参考书:提供相关的参考书籍,为学生提供更多的学习资料和扩展知识。
3.多媒体资料:制作PPT、动画等多媒体资料,为学生提供直观的学习体验和理解。
4.实验设备:准备齿轮啮合实验设备,让学生进行实际操作和观察,增强实践能力。
五、教学评估为了全面、客观、公正地评估学生的学习成果,将采取以下评估方式:1.平时表现:通过观察学生在课堂上的参与程度、提问回答等情况,评估学生的学习态度和理解能力。
2.作业:布置相关的作业,评估学生的知识掌握和应用能力。
3.考试:安排定期的考试,评估学生的综合运用能力和对知识的掌握程度。
六、教学安排教学进度、教学时间和教学地点的安排如下:1.教学进度:按照教材的章节顺序进行教学,确保每个章节的教学内容都能得到充分讲解和实践。
齿轮啮合原理吴序堂第二版齿轮是一种常见的传动装置,它由多个齿轮组成,通过齿轮之间的啮合来传递动力。
齿轮传动具有传递力矩大、传动效率高、传动平稳等优点,被广泛应用于机械传动领域。
齿轮啮合原理是指齿轮间的啮合方式和传动规律。
齿轮的啮合方式有两种,分别是直齿轮和斜齿轮。
直齿轮是指齿轮的齿轮轴线平行,齿轮轴间的啮合线为直线,当两个直齿轮啮合时,两个齿轮的齿轮齿间是呈现相等的圆弧。
斜齿轮是指齿轮的齿轮轴线不平行,两个齿轮的啮合线为螺旋线。
不同的齿轮类型有不同的啮合方式和传动规律。
直齿轮的啮合原理是指两个直齿轮间的啮合规律。
当两个直齿轮啮合时,它们之间传递的力和转矩是相等的,这是因为当两个齿轮啮合时,它们之间的啮合点速度是相等的。
直齿轮的啮合规律是由齿轮的啮合角度和模数决定的,当齿轮的啮合角度和模数相同时,它们之间的啮合效果是最好的。
斜齿轮的啮合原理是指两个斜齿轮间的啮合规律。
斜齿轮的啮合规律与直齿轮有很大的不同,当两个斜齿轮啮合时,它们之间的啮合点速度是不相等的,这是因为斜齿轮的齿轮齿间是呈现斜线状的。
斜齿轮的啮合规律是由齿轮的啮合角度和压力角决定的,当齿轮的啮合角度和压力角相同时,它们之间的啮合效果是最好的。
齿轮啮合原理是齿轮传动的基础,它决定了齿轮间的啮合规律和传动效果。
了解齿轮啮合原理可以帮助我们正确选择齿轮传动方式和齿轮类型,提高齿轮传动的效率和稳定性。
同时,齿轮啮合原理还可以帮助我们设计和制造更加高效的齿轮传动装置,促进机械传动技术的发展。
齿轮啮合原理的研究对于提高齿轮传动的效率和稳定性具有重要意义。
通过深入研究齿轮啮合原理,我们可以优化齿轮的设计和制造工艺,提高齿轮传动的传动效率和传动稳定性,减少齿轮传动装置的能量损耗和噪音,延长齿轮传动装置的使用寿命。
齿轮啮合原理的研究对于促进机械传动技术的发展也具有重要意义。
通过深入研究齿轮啮合原理,我们可以不断创新齿轮传动技术,开发出更加高效、稳定和可靠的齿轮传动装置,满足不同工况下的传动需求。
齿轮齿条啮合原理
嘿,朋友!今天咱就来好好唠唠齿轮齿条啮合原理!你知道吗,这就好比两个好伙伴,相互配合,共同完成一件大事!
就说咱平时骑的自行车吧,那链条和齿轮的配合,不就是齿轮齿条啮合原理的一个生动例子嘛!当我们用力蹬脚蹬子时,链条带动齿轮转动,而齿轮又推动着自行车前进,这一系列动作,多么神奇!
齿轮就像是一个非常有干劲的小伙伴,而齿条呢,则像是一个特别听话的跟随者。
齿轮转动的时候,一个个齿就像是小拳头,用力地推动着齿条前进。
这不就跟赛场上接力比赛似的,一棒接一棒,传递着力量!
想象一下,如果齿轮和齿条之间不配合好,那会怎么样?肯定乱套啦!就跟两个合作的人总是闹别扭,事情还怎么干得成呢!
再看看那些大型机械,比如起重机。
起重机的起重臂能够灵活地上下移动,这里面可少不了齿轮齿条的完美啮合呀!如果它们不和谐,能把重物稳稳地吊起和放下吗?肯定不行嘛!
齿轮齿条啮合原理真的太重要啦!它们的相互配合就像是一场精彩的舞蹈,谁也离不开谁。
在我们的生活中,到处都能看到它们配合的身影。
我们应该为这样的奇妙原理而感叹,不是吗?
我的观点就是,齿轮齿条啮合原理虽然看似简单,却是我们现代生活中不可或缺的一部分。
我们要好好珍惜和利用它,让它为我们创造更多的美好和便利!。
硕士学位课程考试试卷考试科目:齿轮啮合原理考生姓名:考生学号:学院:专业:考生成绩:任课老师(签名)考试日期:2012 年6月日至月日一、基本概念(每题4分,共计32分)1.解释齿轮的瞬心线?答:两个构件1和2相对于一个固定参考标架f做平面运动(如图1),在固定坐标系中,两构件在某点的相对速度等于零,该点就是瞬时回转中心I,而瞬时回转中心I在坐标系(i =1,2)中的轨迹就是齿轮的瞬心线。
图1.1即绕转动时,点I(它沿运动,或处于静止状态)会描绘出瞬心线传动比,当是常数时,两瞬心线是半径分别为和的两个圆,当不是常数时,瞬心线是非圆形曲线,成封闭的或不封闭的。
2.解释齿轮的瞬时回转轴?答:瞬时回转轴是齿轮对另一齿轮相对运动中的角速度的作用线。
如图1.2所示瞬时回转轴(OI)是齿轮1对齿轮2(或齿轮2对齿轮1)相对运动中的角速度的作用线,有同理图1.23.解释齿轮的瞬轴面?答:齿轮的瞬轴面是指瞬时回转轴在与回转齿轮刚性固接的动参考标架中的轨迹。
在两相交轴之间的回转运动进行传递的情况下,瞬轴面是两个顶角为和的圆锥(如图1.3).这两个圆锥称作节锥,它们的切触线是OI,并且其相对运动是纯滚动——绕OI运动。
当节锥2处于静止时,角速度表示绕OI转动的节锥1的角速度。
图1.34.解释平面曲线的曲率?答:如图1.4,在平面曲线上的两点M、N,当点N趋近于点M时,比值的极限称为平面曲线在点M处的曲率(记为K)。
即。
图1.45.解释共轭齿形?答:共轭齿形是两齿轮在接触点处的公法线与回转中心线相交(如图1.5),并且该线分为和两线段有如下的关系式:=()这里,;(1)对于非圆齿形是规定的齿轮传动比函数,(2)对于圆形齿轮是常数。
图1.5常用共轭齿形是渐开线齿形。
6.解释啮合面?答:啮合面是表示在与机架刚性固接的固定坐标系中的瞬时接触线族。
啮合面用如下方程表示:式中,描述从到的坐标变换。
7.解释齿廓渐屈线?答:如图1.6所示,假定平面曲线I是给定的。
各线段(i=1,2,…,n)是曲线I在点的曲率半径,而点是曲率中心。
曲率中心的轨迹是曲线I的渐屈线E。
图1.68.写出Euler的方程式?答:Euler方程式为:式中q是由矢量和单位矢量构成的夹角(如图5)。
矢量表示曲面的切面上选取的方向,而是曲面在这个方向上的法曲率。
单位矢量和沿着这两个主方向,而和是主曲率。
Euler方程建立了曲面的法曲率和主曲率之间的关系。
图1.5二、 采用数学软件推导微分的方法(16分)要求:举实例详细说明,并作图及列出程序。
MATLAB 是许多学科的解题工具,将MATLAB 融入其它课程的学习中,可以大大提高运算效率和准确性。
随着计算机的普及和国民整体素质的提高,科学计算将会更加的普及。
MATLAB 在矩阵及数值计算、多项式和线形代数、符号数学的基本方法等方面都有较好的应用,下面的例子为运用MATLAB 求解微分方程。
实例:已知一个二阶线性系统的微分方程为:⎪⎩⎪⎨⎧==>=+1)0(,0)0(0,0'22x x a ax dt x d其中a=2,绘制系统的时间响应曲线和相平面图。
解:令,则得到系统的状态方程: ⎪⎩⎪⎨⎧==-==1)0(,0)0(122'11'2x x ax x x x 建立一个函数文件sys.m :function xdot=sys(t,x) %建立函数文件 xdot=[-2*x(2);x(1)]; % xdot 的表达式 取t0=0,tf=20,求微分方程;t0=0;tf=20; %确定t 的值 [t,x]=ode45('sys',[t0,tf],[1,0]); %求数值解[t,x] %输出结果 subplot(1,2,1);plot(t,x(:,2)); %以子图形式绘出解的曲线subplot(1,2,2);plot(x(:,2),x(:,1)); %以子图形式绘出相平面曲线axis equal运行结果为:ans =0 1.0000 00.0001 1.0000 0.00010.0001 1.0000 0.00010.0002 1.0000 0.00020.0002 1.0000 0.00020.0005 1.0000 0.00050.0007 1.0000 0.00070.0010 1.0000 0.00100.0012 1.0000 0.0012…19.1332 -0.3498 0.661819.2670 -0.5196 0.603619.4007 -0.6708 0.523819.5344 -0.7980 0.425319.6681 -0.8968 0.311619.7511 -0.9422 0.235219.8340 -0.9747 0.155619.9170 -0.9937 0.073820.0000 -0.9991 -0.0090方程的时间相应及相平面曲线如图2.1所示。
三、推导方程(1题8分,2题12分,共计20分)1. 坐标系和刚性固接到齿轮1和齿轮2,两齿轮传递平行轴之间的回转运动(图1)。
齿轮的两回转角和用方程:联系着,式中和是两瞬线的半径。
E是两转动轴线之间的最短距离。
固定坐标系刚性固接到齿轮箱体上。
是辅助坐标系,它也刚性固接到齿轮箱体上。
图3.1推导:1)从S2到S1的坐标变换方程。
2)从S1到S2的坐标变换方程。
解:1)从到的坐标变换从到的坐标变换基于矩阵方程(3.1.1) 式中和是转动矩阵,而是移动矩阵。
(3.1.2)=从方程(3.1.2)可导出(3.1.3) 利用方程(3.1.1)和(3.1.2),则可以得到2) 从S1到S2的坐标变换方程逆矩阵可以通过的各元素表达如下(3.1.4) 逆坐标变换基于矩阵方程从该方程可导出2. 坐标系,和分别与齿条刀具、被加工的直齿外齿轮和机架刚性固接(图2)。
齿条刀具的齿形是直线,该直线用方程()表示在中。
这里,a是齿形角(压力角);u是变参数,该参数用来确定齿条刀具齿形上的流动点位置(对于点M,;对于点,)。
瞬时回转中心为。
齿轮的瞬心线是半径为r的圆,而齿条刀具的瞬心线与轴重合(图2)。
齿条刀具的位移和齿轮的转角有如下关系式图3.2求:1)推导啮合方程。
2)导出齿条刀具和被加工齿轮在啮合中的啮合线方程。
3)导出被加工齿轮的齿形方程。
4)确定齿条刀具的极限安装位置,这种安装位置将使齿轮的被加工齿形避免根切,并作图说明。
解:(1)由于曲面和在其切触点处的公法线通过瞬时回转轴线,则有方程:(3.2.1)式中,=r=0是表示在中的I的坐标。
==(3.2.2)式中和是产形齿形的切线矢量和法线矢量,是轴的单位矢量。
由式3.2.1和3.2.2可以导出啮合方程的下列表达式(3.2.3)(2)由(1)的条件可得,啮合线方程(3.2.4) 表示。
这样可以得到(3.2.5)从方程(3.2.5)可导出(3.2.6)啮合线LK(如图3.2.2)是通过I的一条直线,并且与轴构成夹角()。
线段IK上的个高点对应于0;线段IL上的各个点对应于0。
图3.2.1(3)利用(1)的条件,利用微分几何中提出的方法导出被加工尺形的方程①利用矩阵方程(3.2.7)将被加工齿形族的方程表示在坐标系中。
从方程(3.2.7)和题中条件可以导出(3.2.8)②导出啮合方程(3.2.9) 矢积表示中的产形齿形的法线矢量,并且与共线。
经变换后,方程(3.2.8)和(3.2.9)将给出啮合方程被加工齿形方程(3.2.10)(4)齿条刀具齿形的界限点在齿轮的齿形上形成奇异点。
齿条刀具的界限点可以用啮合方程(3.2.11)和根切方程(3.2.12)确定,后一方方程可以用方程(3.2.13) 由题中条件和方程(3.2.11)、(3.2.13)可以导出(3.2.14)则可以得到u的界限值为(3.2.15)同理可得(3.2.16)图3.2.2图解说明了齿条刀具的极限安装位置,此时点F形成齿轮齿形上的奇异点。
图3.2.2四、综述及分析?(16分)采用齿轮啮合原理的基本理论和方法,结合工程实际或列举实例,综合、分析齿轮啮合原理的应用及说明其意义。
答:齿轮机构是在各种机构中应用最为广泛的一种传动机构。
它依靠齿轮齿廓直接传递空间任意两轴间的运动和动力,并具有传递功率范围大、传动效率高、使用寿命长、工作可靠,那么采用齿轮啮合原理的基本理论和方法对其研究有着实际的意义,下面以生成面齿轮齿面为例说明齿轮啮合的运用及其意义。
面齿轮传动是一种新型齿轮传动,具有许多独特的优点:1)小齿轮为渐开线齿轮时,其轴向移动产生的误差对传动性能几乎没有影响。
2)面齿轮传动比普通锥齿轮传动具有较大的重合度。
3)小齿轮为直齿圆柱齿轮时,小齿轮上无轴向力作用。
4)对于点接触面齿轮传动,在理论上仍然能保证定传动比传动。
5)面齿轮用于传动装置时传动振动小和噪音低。
生成面齿轮齿面首先要建立坐标系(如图4.1、4.2)图4.1 图4.2在推导面齿轮齿面时,选择了四个坐标系:两个固定坐标系(,)和(,,两个动坐标系(,和(,。
固定坐标系和分别建立在刀具齿轮支架和面齿轮支架上,它们的坐标原点重合在刀具轴线和面齿轮轴线的交点上,如图4.1所示为固定坐标系之间的位置关系,它们的x轴重合。
动坐标系和分别与刀具齿轮和面齿轮固连,它们坐标原点也在两轴线的交点上,如图 4.2所示((和(轴重合,图中分开为便于表示),和轴交角为,初始时坐标系和、和,重合,动坐标系,各绕其:轴转动,转角分别为。
面齿轮和刀具齿轮的传动比为:…………………………………………………………..(4.1)图4.3如图4.3所示面齿轮齿面可以分为两部分,工作齿面和齿根过渡区域,它们中间的交线为过渡曲线,下面介绍如何得出这样一个完整的齿面设面齿轮和传动直齿轮啮合时啮合点为P,在刀具坐标系中,点P的矢量为,刀具的回转角速度矢为),因此点P在中的速度矢为(4.2)设为(4.3)同样在面齿轮坐标系中,点P的矢量为,面齿轮的回转角速度矢为),点P在中的速度矢为(4.4) 设为(4.5) 其中=(4.6)将转换到刀具坐标系中为(4.7)其中为从面齿轮坐标系到刀具坐标系的转换矩阵,为(4.8)并且=(4.9)因此可得在刀具坐标系中啮合点P处两齿面的相对运动速度为(4.10)其中,:和分别为刀具齿面在刀具坐标系中的各坐标分量。
根据啮合原理在啮合点处齿面相对运动速度矢在公法线上的投影为零,得到啮合方程为=+(4.11)由此得到了啮合方程,再根据坐标变换,将啮合点从刀具坐标系转换到面齿轮坐标系中,得到面齿轮工作齿面方程为(4.12)五、学习心得体会?(16分)学习本门课程的具体详细收获及体会。
答:尽管齿轮啮合原理课程即将要结束,但它带给了我很多的收获与思考。