第三章 线性系统的能控性
- 格式:ppt
- 大小:2.74 MB
- 文档页数:54
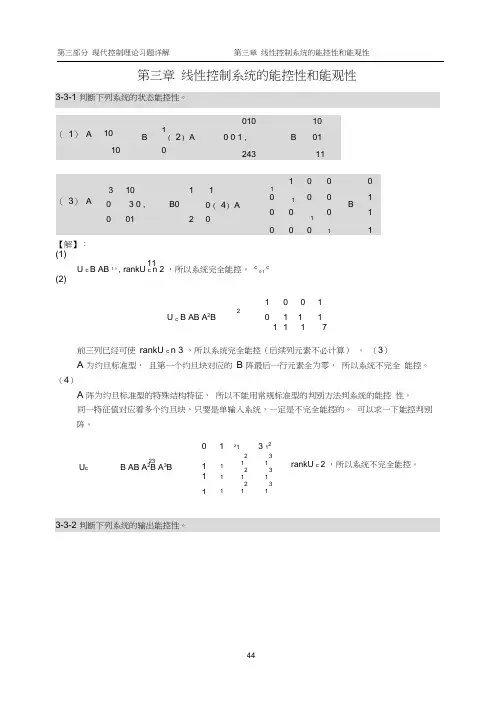
第三章 线性控制系统的能控性和能观性01010( 1) A10 1B( 2) A 0 0 1 ,B 011024311113 10 1 1( 3) A0 10 1 0 3 0 , B00 ( 4) AB0 0 11 001211【解】:(1)11U c B AB 1 1, rankU c n 2 ,所以系统完全能控。
c 0 1 c(2)10 0 1 2U c B AB A 2B1 1 11 1 17前三列已经可使 rankU c n 3 ,所以系统完全能控(后续列元素不必计算) 。
(3)A 为约旦标准型, 且第一个约旦块对应的B 阵最后一行元素全为零, 所以系统不完全 能控。
(4)A 阵为约旦标准型的特殊结构特征, 所以不能用常规标准型的判别方法判系统的能控 性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
1213 1223B AB A 2B A 3B2 3 U c1 1 12 13 1 11 12 31111rankU c 2 ,所以系统不完全能控。
3 1110 10 0 x0 3 0x 0 0ux0 01x 0u (1)0 0 12(2)61161101yxy10 0x1 10解】:1)311 已知 A 0 30,B0 001220 0 D CB CAB CA 2B 0 0 前两列已经使 rank D CBCAB110 1 0 00 , C ,D1 1 0 0 031112CA B m2, 所以系统输出能控。
(2) 系统为能控标准型,所以状态完全能控。
又因输出矩阵 状态维数 n ,所以状态能控则输出必然能控。
C 满秩,且输出维数 m 小于1 0x0 01xx1 1 (1)2 43 ; (2) 1 x 0;011y1 1xyx12 12 1 0 4 0 0x0 20xx4 0x(3);(4)0 030 1y0 1 1x y11 4x解】:1)已知 A01 00 242-3-3 判断下列系统的能观性。

线性系统的能控性判据分析摘要:能控性是线性系统的一个基本结构特征,它的出现对于系统控制和系统估计问题的研究具有重要意义。
本文主要讨论线性系统的能控性判据。
其中,能控性的判据分析有很多种方法,最常用的及时约旦标准型方法。
一:问题的提出设计一个线性系统,我们总是希望所施加的控制u(t)能完全控制系统的运动状态,而不希望出现失控现象。
因此,判断一个系统能控性问题就显得尤为重要。
能控性是从状态的控制能力方面来揭示了控制系统的一个基本属性。
现代控制理论的许多基本问题,如最优控制和最优估计,都是以能控性为存在条件的。
1. 能控性定义 能控性的直观讨论从状态空间的角度进行讨论:输入和输出构成系统外部变量,状态为系统内部变量。
能控性主要看其状态是否可由输入影响。
每一个状态变量的运动都可由输入来影响和控制,由任意的始点到达原点,为能控,反之为不完全能控。
具体来说就是指外加控制作用u(t) 对受控系统的状态变量x(t)和输出变量y(t)的支配能力,它回答了u(t)能否使x(t)和y(t)作任意转移的问题。
二:问题的解决我们利用线性系统的能控性判据来判断其能控性。
设线性定常系统状态方程为:能控性判据:1.格拉姆矩阵判据线性定常系统(1)为完全能控的充分必要条件是,存在时刻 ,使如下定义的格拉姆(Gram )矩阵其中,该判据的证明用到了范数理论中的矩阵范数,在此不再赘述。
2.秩判据线性定常系统(1)为完全控的充分必要条件是3.PBH 秩判据.,,,,)1(0,)0(,0常阵为维输入向量为维状态向量为p n n n B A p u n t x x Bu A ⨯⨯≥=+=x x x01>t 为非奇异⎰--=tt A T At c dte BB e t W T],0[.][,][11阵称为系统的能控性判别的维数为矩阵其中B A AB B Q A n nB A AB B rank n c n --==线性定常系统(1)为完全能控的充分必要条件是,对矩阵A 的所有特征值4. PBH 特征向量判据线性定常系统(1)为完全能控的充分必要条件是A 不能有与B 的所有列相正交的非零左特征向量。
3.1 线性定常系统的能控性线性系统的能控性和能观测性概念是卡尔曼在1960年首先提出来的。
当系统用状态空间描述以后,能控性、能观测性成为线性系统的一个重要结构特性。
这是由于系统需用状态方程和输出方程两个方程来描述输入-输出关系,状态作为被控量,输出量仅是状态的线性组合,于是有“能否找到使任意初态转移到任意终态的控制量”的问题,即能控性问题。
并非所有状态都受输入量的控制,有时只存在使任意初态转移到确定终态而不是任意终态的控制。
还有“能否由测量到的由状态分量线性组合起来的输出量来确定出各状态分量”的问题,即能观测性问题。
并非所有状态分量都可由其线性组合起来的输出测量值来确定。
能控性、能观测性在现代控制系统的分析综合中占有很重要的地位,也是许多最优控制、最优估计问题的解的存在条件,本章主要介绍能控性、能观测性与状态空间结构的关系。
第一节线性定常系统的能控性能控性分为状态能控性、输出能控性(如不特别指明便泛指状态能控性)。
状态能控性问题只与状态方程有关,下面对定常离散系统、定常连续系统分别进行研究(各自又包含单输入与多输入两种情况):一、离散系统的状态可控性引例设单输入离散状态方程为:初始状态为:用递推法可解得状态序列:可看出状态变量只能在+1或-1之间周期变化,不受的控制,不能从初态转移到任意给定的状态,以致影响状态向量也不能在作用下转移成任意给定的状态向量。
系统中只要有一个状态变量不受控制,便称作状态不完全可控,简称不可控。
可控性与系统矩阵及输入矩阵密切相关,是系统的一种固有特性。
下面来进行一般分析。
设单输入离散系统状态方程为:(3-1)式中,为维状态向量;为纯量,且在区间是常数,其幅值不受约束;为维非奇异矩阵,为系统矩阵;为维输入矩阵:表示离散瞬时,为采样周期。
初始状态任意给定,设为;终端状态任意给定,设为,为研究方便,且不失一般性地假定。
单输入离散系统状态可控性定义如下:在有限时间间隔内,存在无约束的阶梯控制信号,,,能使系统从任意初态转移到任意终态,则称系统是状态完全可控的,简称是可控的。