判定线性系统的能控性和能观性
- 格式:pdf
- 大小:215.40 KB
- 文档页数:5
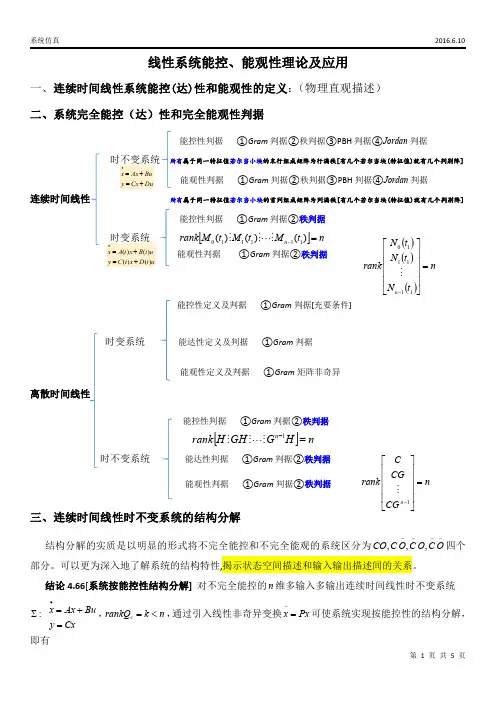
第4章(1)线性控制系统的能控性和能观性第四章线性控制系统的能控性和能观性在现代控制理论中,能控性(Controllability)和能观性(Observ- ability)是两个重要的概念,它是卡尔曼(Kalman)在1960年提出的,是最优控制和最优估计的设计基础。
能观(测)性针对的是系统状态空间模型中的状态的可观测性,它反映系统的内部状态x(t)(通常是不可以直接测量的)被系统的输出量y(t)(通常是可以直接测量的)所反映的能⼒。
能控性严格上说有两种,⼀种是系统控制输⼊u(t)对系统内部状态x(t)的控制能⼒,另⼀种是控制输⼊u(t)对系统输出y(t)的控制能⼒。
但是⼀般没有特别指明时,指的都是状态的可控性。
所以,系统的能控性和能观性研究⼀般都是基于系统的状态空间表达式的。
4-1 线性连续定常系统的能控性定义对于单输⼊n 阶线性定常连续系统bu Ax x+= 若存在⼀个分段连续的控制函数u(t),能在有限的时间段 []f t t ,0内把系统从0t 时刻的初始状态()0t x 转移到任意指定的终态()f t x ,那么就称系统在0t 时刻的状态()0t x 是能控的;如果系统每⼀个状态()0t x 都能控,那么就称系统是状态完全可控的。
反之,只要有⼀个状态不可控,我们就称系统不可控。
对于线性定常连续系统,为简便计,可以假设00=t ,()0=f t x ,即00=t 时刻的任意初始状态()0x ,在有限时间段转移到零状态()0=f t x (原点)。
4-2线性连续定常系统的能控性判别4-2-1具有约旦标准型系统的能控性判别 1.单输⼊系统具有约旦标准型系统bu x x+Λ==Λn λλλλ0000000000000321n λλλλ≠≠≠≠ 321即为n 个互异根或bu Jx x+==++n m m J λλλλλλ000000000000000100000000121111m 个重根1λn-m 个互异根n m m λλλ≠≠≠++ 21 例:分析下列系统的能控性(1)u b x x+??=221000λλ[]x c c y 21=解:?=111x xλ 1x 与u ⽆关,即不受u 控制 ?+=u b x x2222λ 2x 为能控状态该系统为状态不完全能控,因⽽为不能控系统。
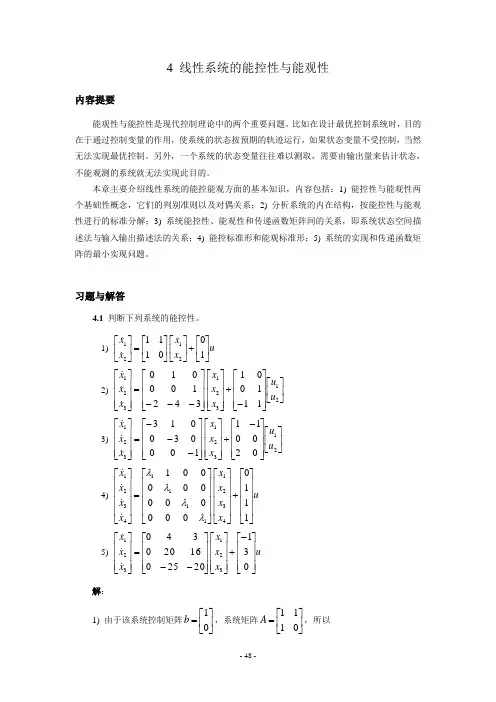
4 线性系统的能控性与能观性内容提要能观性与能控性是现代控制理论中的两个重要问题。
比如在设计最优控制系统时,目的在于通过控制变量的作用,使系统的状态按预期的轨迹运行,如果状态变量不受控制,当然无法实现最优控制。
另外,一个系统的状态变量往往难以测取,需要由输出量来估计状态,不能观测的系统就无法实现此目的。
本章主要介绍线性系统的能控能观方面的基本知识,内容包括:1) 能控性与能观性两个基础性概念,它们的判别准则以及对偶关系;2) 分析系统的内在结构,按能控性与能观性进行的标准分解;3) 系统能控性、能观性和传递函数矩阵间的关系,即系统状态空间描述法与输入输出描述法的关系;4) 能控标准形和能观标准形;5) 系统的实现和传递函数矩阵的最小实现问题。
习题与解答4.1 判断下列系统的能控性。
1) u x x x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡10 01112121 2) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321111001 342100010u u x x x x x x3) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321020011 100030013u u x x x x x x4) u x x x x x x x x⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡1110 000000000001432111114321λλλλ 5) u x x x x x x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡031 2025016200340321321解:1) 由于该系统控制矩阵⎥⎦⎤⎢⎣⎡=01b ,系统矩阵⎥⎦⎤⎢⎣⎡=0111A ,所以⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=1101 0111Ab 从而系统的能控性矩阵为[]⎥⎦⎤⎢⎣⎡==1011Ab bU C 显然有[]n Ab b U C ===2rank rank满足能控性的充要条件,所以该系统能控。
用约当规范形判别线性系统的能控性赛耀樟控制科学与工程学院 检测技术与自动化装置 2009010189摘要:60年代初期卡尔曼提出了能控性和能观测性概念。
能控性和能观测性分别是从状态的控制能力和状态的测辨能力两个方面揭示了控制系统的两个基本属性。
现代控制理论的许多基本问题,如最优控制和最优估计,都是以能控性和能观测性为存在条件的。
一 能控性约当规范形判据内容线性定常系统的能控性约当规范形判据 线性定常系统状态方程(1)当矩阵A 的特征值两两互质时.,,,,)3(0,)0(,0常阵为维输入向量为维状态向量为p n n n B A p u n t x x Bu A ⨯⨯≥=+=x x x ()()⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=+==++++⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⨯⨯⨯⨯i i i i i i i i p i i i i i l p n l n n l l n B B B B J J J J B B B B J J J A u B A n A B u B ααδδδδδδδλδλδλλλλˆˆˆˆˆˆˆˆˆ:ˆˆˆˆ3,),(,),(),()2(.,2121,21,2121221121 其中导出的约当规范形由时且重重重的特征值为当矩阵不包含元素全为零的行中x x x x二 能控性约当规范形判据推导为使推证过程中的符号不致过于复杂,不失普遍性,不妨取为..,,2,1ˆˆˆ),,2,1(ˆ,)(ˆˆˆˆ11212121,证略均为行线性无关对阵的最后一行所组成的矩由而l i ri b b b k B r r r rik b b b B J i ri ri i ik i i i i ik ik p r ik i i i r r i i ik ik ik =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==+++⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⨯⨯ααδλλλα其中ran可以证出约当规范性判据。
C 1, C 2 Cn 满足G = C ? = C 3性无关。
,则把向量 X 「X 2 X n 叫做线11 1 0L 1X i 二 01 1X 2 二 1X 3_0 _0第三章 线性控制系统的能控性和能观性在现代控制理论中,能控性和能观性是卡尔曼(Kalma n )在I960年首先提出来的,它是最优控制和最优估值的设计基 础。
能控性和能观性是分别分析 u(t)对状态x(t)的控制能力 以及输出y(t)对状态x(t )的反映能力。
§3—1能控性的定义能控性所研究的只是系统在控制作用 u(t)的作用下,状态 矢量x(t)的转移情况,而与输出y(t)无关。
矢量的线性无关与线性相关:如果G xi * C 2x2 C 3X 3C n xn= 0式中的常数无关。
若向量X i ,x 2…x n 中有一个向量Xi 为其余向量的线性组 合,□便是线性例如向量C nX i不全为零。
故为线性相关。
具有约旦标准型系统的能控性判据 1 •单输入系统先将线性定常系统进行状态变换, 又例如在式中X 3X 2, X i3X ^ 0式中系数并把状态方程的A 阵和B相关。
阵化为约旦标准型(A, E?),再根据B 阵确定系统的能控性。
具有约旦标准型系统矩阵的单输入系统,状态方程为即:Xi、C j X j j=i j-i则称向量X i ,X 2 x n 为线性相关。
例如向量X iX3二 2_4便是线性x 八 x bu 或 x 二 Jx bu2,各根互异。
其中:(特征值有重根的)10 11 0111 Jnb 2bX11C2c 1xc 2x 2y cy(t)u(t)b1X1C2_b n卜面列举两个二阶系统,对其能控性加以剖析。
「0 例:1)厂匕x 2 二 2X 2 pu 0 0X u 2 巾2m 2故为状态不完全能控的,11X_b 2例:2)y约旦型)c 2 ]xX 厂'1x 1 x 2X 2= 2X 2 b ?u (为y = GN c 2x 2lL (t )从上式看出X 1与u 无关,即不受u 控制,因而只有一个特— 01 殊状态。