弹性力学-第三章-应变状态分析
- 格式:doc
- 大小:469.00 KB
- 文档页数:22

第三章应变状态分析位移与变形正应变纯变形位移与刚性转动位移应变分量坐标转轴公式主应变齐次方程组体积应变变形协调方程变形协调方程证明变形与应变分量切应变几何方程与应变张量位移增量的分解应变张量应变状态特征方程变形协调的物理意义变形协调方程的数学意义多连域的变形协调一、内容介绍本章讨论弹性体的变形,物体的变形是通过应变分量确定的。
因此,首先确定位移与应变分量的基本关系-几何方程。
由于应变分量和刚体转动都是通过位移导数表达的,因此必须确定刚体转动位移与纯变形位移的关系,才能完全确定一点的变形。
对于一点的应变分量,在不同坐标系中是不同的。
因此,应变状态分析主要是讨论不同坐标轴的应变分量变化关系。
这个关系就是应变分量的转轴公式;根据转轴公式,可以确定一点的主应变和应变主轴等。
当然,由于应变分量满足二阶张量变化规律,因此具体求解可以参考应力状态分析。
应该注意的问题是变形协调条件,就是位移的单值连续性质。
假如位移函数不是基本未知量,由于弹性力学是从微分单元体入手讨论的,因此变形后的微分单元体也必须满足连续性条件。
这在数学上,就是应变分量必须满足变形协调方程。
在弹性体的位移边界,则必须满足位移边界条件。
二、重点1、应变状态的定义:正应变与切应变;应变分量与应变张量;2、几何方程与刚体转动;3、应变状态分析和应变分量转轴公式;4、应变状态特征方程和应变不变量;主应变与应变主轴;5、变形协调方程与位移边界条件。
§3.1 位移分量与应变分量几何方程学习思路:知识点由于载荷的作用或者温度的变化,物体内各点在空间的位置将发生变化,就是产生位移。
这一移动过程,弹性体将同时发生两种可能的变化:刚体位移和变形位移。
变形位移是与弹性体的应力有着直接的关系。
弹性体的变形通过微分六面体单元描述,微分单元体的变形分为两个部分,一是微分单元体棱边的伸长和缩短;二是棱边之间夹角的变化,分别使用正应变和切应变表示这两种变形的。
由于是小变形问题,单元变形可以投影于坐标平面分析。

弹性力学简明教材(电子版)
本教材旨在对读者简明地阐述弹性力学的基本概念和公式,涉
及弹性体的基本特性,力学基本定律,应力应变状态的描述和计算,以及弹性体固有振动和波的传播等内容。
第一章弹性体的基本特性
本章介绍了弹性体的基本特性,包括弹性体的定义、分类、形
变和应力等概念,以及材料的弹性模量和泊松比等基本参数。
通过
本章的研究,读者将会了解弹性体的基本特性,为后续章节的研究
打下基础。
第二章力学基本定律
本章介绍了力学基本定律,即牛顿定律和能量守恒定律,以及
它们在弹性力学中的应用。
通过本章的研究,读者将会了解力学基
本定律的含义和应用。
第三章应力应变状态的描述和计算
本章介绍了应力应变状态的描述和计算方法,涉及应力应变张量和应力应变关系等内容。
通过本章的研究,读者将会了解弹性体中应力应变关系的基本概念和计算方法。
第四章弹性体固有振动和波的传播
本章介绍了弹性体固有振动和波的传播,包括弹性体的本征频率和本征振型,以及弹性波的类型和传播速度等内容。
通过本章的研究,读者将会了解弹性体固有振动和波的传播,为实际问题的解决提供理论基础。
第五章应用实例分析
本章通过实际问题的分析和计算,综合运用前面章节所学的知识,掌握弹性力学在实际工程中的应用。
通过本章的研究,读者将会了解如何分析和解决实际弹性力学问题。
附录:本教材的符号表和计算公式等内容,供读者参考。
总结
弹性力学是工程力学的重要分支之一,具有广泛的应用。
本教材对弹性力学的基本概念、公式和应用进行了简要的阐述,适合初学者学习和工程技术人员参考使用。
第3章 弹性力学经典变分原理3.1 弹性力学基础3.1.1 变形分析要研究物体变形首先要研究其位移如何来描述。
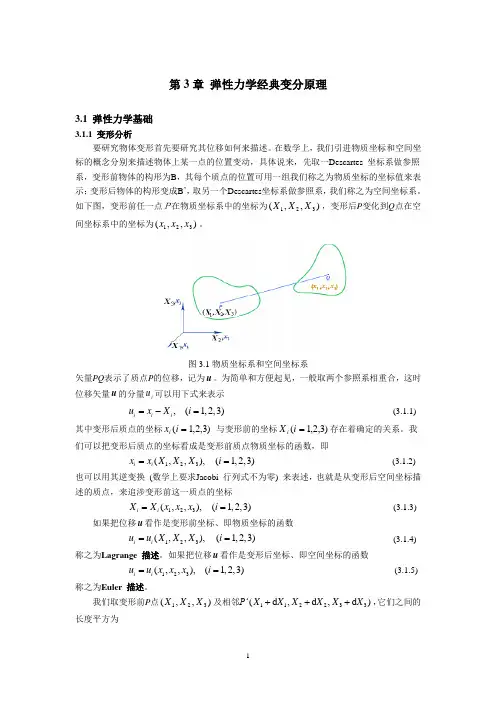
在数学上,我们引进物质坐标和空间坐标的概念分别来描述物体上某一点的位置变动,具体说来,先取一Descartes 坐标系做参照系,变形前物体的构形为B ,其每个质点的位置可用一组我们称之为物质坐标的坐标值来表示;变形后物体的构形变成B ’,取另一个Descartes 坐标系做参照系,我们称之为空间坐标系。
如下图,变形前任一点P在物质坐标系中的坐标为),,(321X X X ,变形后P 变化到Q 点在空间坐标系中的坐标为),,(321x x x 。
图3.1物质坐标系和空间坐标系矢量PQ 表示了质点P 的位移,记为u 。
为简单和方便起见,一般取两个参照系相重合,这时位移矢量u 的分量i u 可以用下式来表示,(1,2,3)i i i u x X i =-= (3.1.1)其中变形后质点的坐标)3,2,1(=i x i 与变形前的坐标)3,2,1(=i X i 存在着确定的关系。
我们可以把变形后质点的坐标看成是变形前质点物质坐标的函数,即123(,,),(1,2,3)i i x x X X X i == (3.1.2)也可以用其逆变换 (数学上要求Jacobi 行列式不为零) 来表述,也就是从变形后空间坐标描述的质点,来追涉变形前这一质点的坐标123(,,),(1,2,3)i i X X x x x i == (3.1.3) 如果把位移u 看作是变形前坐标、即物质坐标的函数123(,,),(1,2,3)i i u u X X X i == (3.1.4)称之为Lagrange 描述。
如果把位移u 看作是变形后坐标、即空间坐标的函数123(,,),(1,2,3)i i u u x x x i == (3.1.5)称之为Euler 描述。
我们取变形前P 点),,(321X X X 及相邻P’112233(d ,d ,d )X X X X X X +++,它们之间的长度平方为3201d d d i i i s X X ==∑ (3.1.6)它们变形后相应于Q 点),,(321x x x 及相邻Q ’112233(d ,d ,d )x x x x x x +++,其长度平方为321d d d i i i s x x ==∑ (3.1.7)根据变形前后的坐标关系有3311d d ,d d i ii j j j j jjxX x X X x i X x ==∂∂==∂∂∑∑从而有33220,11d d ()d d ij i j i j i jx x s s X X X X αααδ==∂∂-=-∂∂∑∑(3.1.8)或者33220,11d d ()d d ij i j i j i jX X s s x x x x αααδ==∂∂-=-∂∂∑∑(3.1.9)如果定义3121ij ij i j x x E X X αααδ=⎛⎫∂∂=- ⎪ ⎪∂∂⎝⎭∑ (3.1.10)及3121ij ij i j X X x x αααεδ=⎛⎫∂∂=- ⎪ ⎪∂∂⎝⎭∑ (3.1.11) 则有 220d d 2d d ij i j s s E X X -= (3.1.12)220d d 2d d ij i j s s x x ε-= (3.1.13)上述表达式中,有重复下标的,i j ,已省略了相应的求和记号3311,i j ==∑∑,称为Einstein 约定。
弹性力学系统中的应变与应力分布弹性力学是研究物体在受力作用下的形变和恢复过程的学科。
在弹性力学系统中,应变和应力分布是两个重要的概念。
应变描述了物体在受力作用下的形变程度,而应力则表示物体单位面积上承受的力的大小。
在弹性力学系统中,应变可以分为线性应变和剪切应变。
线性应变是指物体在受力作用下沿着受力方向发生的形变,剪切应变则是指物体在受力作用下发生的平行于受力方向的形变。
应变的大小可以通过应变率来衡量,即单位时间内的形变量。
应力分布是指物体在受力作用下承受的力在不同部位的分布情况。
根据受力方向的不同,应力可以分为正应力和剪切应力。
正应力是指力的方向与物体表面垂直的应力,剪切应力则是指力的方向与物体表面平行的应力。
应力的大小可以通过应力张量来描述,其中包括正应力和剪切应力的分量。
在弹性力学系统中,应变和应力之间存在着一定的关系。
根据胡克定律,当物体受到的力小于其弹性极限时,应变和应力之间呈线性关系。
这种线性关系可以通过应力-应变曲线来描述,曲线的斜率即为物体的弹性模量,反映了物体对外力的抵抗能力。
应变和应力的分布情况对物体的性能和稳定性具有重要影响。
例如,在工程领域中,对于承受外力的结构件,需要合理设计应力分布,以保证结构的强度和稳定性。
通过对应力分布的分析和优化,可以减少结构的应力集中和疲劳破坏的风险。
此外,应变和应力的分布也与物体的形状和材料性质密切相关。
不同形状和材料的物体在受力作用下会出现不同的应变和应力分布情况。
例如,对于长方形梁受弯的情况,弯曲应变和弯曲应力的分布呈现出特定的形态,可以通过数学模型和实验来研究和预测。
在实际应用中,弹性力学的概念和方法广泛应用于工程、材料科学、地质学等领域。
通过对应变和应力分布的研究,可以帮助我们理解物体在受力作用下的变形和破坏机制,从而指导工程设计和材料选择。
此外,弹性力学的研究还为新材料和新结构的设计提供了理论基础和技术支持。
总之,弹性力学系统中的应变和应力分布是研究物体形变和恢复过程的重要概念。
第三章杆件横截面上的应力应变分析利用截面法可以确定静定问题中的杆件横截面上的内力分量,但内力分量只是横截面上连续分布内力系的简化结果,仅根据内力并不能判断杆件是否有足够的强度。
如用同一种材料制成粗细不同的两根杆,在相同的拉力作用下,两杆的轴力是相同的,当拉力增大时,细杆必定先被拉断。
这说明拉杆的强度不仅与轴力大小有关,还与横截面面积有关,因此还必须引入内力集度的概,即应力的概念。
本章在此基础上分别讨论了杆件在拉压、扭转和弯曲三种基本变形和组合变形下横截面上应力的分布规律,导出了应力计算公式,为后面对杆件进行强度计算打下了基础。
第一节应力、应变及其相互关系一、正应力、剪应力观察图3-1a所示受力杆件,在截面上围绕K点取微小面积,其上作用有微内力,于是在上内力的平均集度为:(3-1)亦称为面积上的平均应力。
一般来说截面上的内力并不均匀分布,因此平均应力随所取ΔA的不同而变化。
当ΔA趋向于零时,的大小方向都将逐渐趋于某一极限。
(3-2)式中,p称为K点的应力,它反映内力系在K点的强弱程度。
p是一个矢量,一般说既不与截面垂直,也不与截面相切。
通常将其分解为垂直于截面的应力分量和相切于截面的应力分量(图3-1b)。
称为正应力,称为切应力。
在国际单位制中,应力的单位是牛顿/米2(N/M2),称为帕斯卡,简称帕(Pa)。
由于这个单位太小,通常使用兆帕(MPa),1MPa = 106Pa。
二、正应变、切应变杆件在外力作用下,其尺寸或几何形状将发生变化。
若围绕受力弹性体中任意点截取一个微小正六面体(当六面体的边长趋于无限小时称为单元体),六面体的棱边边长分别为Δx 、Δy 、Δz (图3-2 )。
把该六面体投影到xy平面(图3-2b)。
变形后,六面体的边长和棱边夹角都将发生变化(图3-2c)。
变形前长为Δx的线段MN,变形后长度为Δx+Δs。
相对变形(3-3)表示线段MN单位长度的平均伸长或缩短,称为平均应变。
当Δx趋向于零,即点N趋向于M点时,其极限为(3-4)式中,ε称为M点沿x方向的线应变或正应变,ε为无量纲量。
第三章应变状态分析知识点位移与变形正应变纯变形位移与刚性转动位移应变分量坐标转轴公式主应变齐次方程组体积应变变形协调方程变形协调方程证明变形与应变分量切应变几何方程与应变张量位移增量的分解应变张量应变状态特征方程变形协调的物理意义变形协调方程的数学意义多连域的变形协调一、内容介绍本章讨论弹性体的变形,物体的变形是通过应变分量确定的。
因此,首先确定位移与应变分量的基本关系-几何方程。
由于应变分量和刚体转动都是通过位移导数表达的,因此必须确定刚体转动位移与纯变形位移的关系,才能完全确定一点的变形。
对于一点的应变分量,在不同坐标系中是不同的。
因此,应变状态分析主要是讨论不同坐标轴的应变分量变化关系。
这个关系就是应变分量的转轴公式;根据转轴公式,可以确定一点的主应变和应变主轴等。
当然,由于应变分量满足二阶张量变化规律,因此具体求解可以参考应力状态分析。
应该注意的问题是变形协调条件,就是位移的单值连续性质。
假如位移函数不是基本未知量,由于弹性力学是从微分单元体入手讨论的,因此变形后的微分单元体也必须满足连续性条件。
这在数学上,就是应变分量必须满足变形协调方程。
在弹性体的位移边界,则必须满足位移边界条件。
二、重点1、应变状态的定义:正应变与切应变;应变分量与应变张量;2、几何方程与刚体转动;3、应变状态分析和应变分量转轴公式;4、应变状态特征方程和应变不变量;主应变与应变主轴;5、变形协调方程与位移边界条件。
§3.1 位移分量与应变分量几何方程学习思路:由于载荷的作用或者温度的变化,物体内各点在空间的位置将发生变化,就是产生位移。
这一移动过程,弹性体将同时发生两种可能的变化:刚体位移和变形位移。
变形位移是与弹性体的应力有着直接的关系。
弹性体的变形通过微分六面体单元描述,微分单元体的变形分为两个部分,一是微分单元体棱边的伸长和缩短;二是棱边之间夹角的变化,分别使用正应变和切应变表示这两种变形的。
由于是小变形问题,单元变形可以投影于坐标平面分析。
根据正应变和切应变定义,不难得到应变与位移的关系-几何方程,或者称为柯西方程。
几何方程给出的应变通常称为工程应变。
几何方程可以表示为张量形式,应该注意的是,正应变与对应应变张量分量相等;而切应变等于对应的应变张量分量的两倍。
几何方程给出了位移分量和应变分量之间的关系。
学习要点:1、位移函数;2、变形与应变分量;3、正应变表达式;4、切应变分量;5、几何方程与应变张量。
1、位移函数由于载荷作用或者温度变化等外界因素等影响,物体内各点在空间的位置将发生变化,即产生位移。
这个移动过程,弹性体将可能同时发生两种位移变化。
第一种位移是位置的改变,但是物体内部各个点仍然保持初始状态的相对位置不变,这种位移是物体在空间做刚体运动引起的,因此称为刚体位移。
第二种位移是弹性体形状的变化,位移发生时不仅改变物体的绝对位置,而且改变了物体内部各个点的相对位置,这是物体形状变化引起的位移,称为变形。
一般来说,刚体位移和变形是同时出现的。
当然,对于弹性力学,主要是研究变形,因为变形和弹性体的应力有着直接的关系。
根据连续性假设,弹性体在变形前和变形后仍保持为连续体。
那么弹性体中某点在变形过程中由M(x,y,z)移动至M'(x',y',z'),这一过程也将是连续的,如图所示。
在数学上,x',y',z' 必为x,y,z的单值连续函数。
设MM'=S 为位移矢量,其三个分量u,v,w为位移分量。
则u=x'(x,y,z)-x=u(x,y,z),v=y'(x,y,z)-y=v(x,y,z)w=z'(x,y,z)-z=w(x,y,z)显然,位移分量u,v,w也是x,y,z的单值连续函数。
以后的分析将进一步假定位移函数具有三阶连续导数。
2、变形与应变分量为进一步研究弹性体的变形情况,假设从弹性体中分割出一个微分六面体单元,其六个面分别与三个坐标轴垂直。
对于微分单元体的变形,将分为两个部分讨论。
一是微分单元体棱边的伸长和缩短;二是棱边之间夹角的变化。
弹性力学分别使用正应变和切应变表示这两种变形的。
对于微分平行六面体单元,设其变形前与x,y,z坐标轴平行的棱边分别为MA,MB,MC,变形后分别变为M'A',M'B',M'C'。
假设分别用εx, εy, εz表示x,y,z轴方向棱边的相对伸长度,即正应变;分别用γxy, γyz, γzx表示x和y,y和z,z和x轴之间的夹角变化,即切应变。
则对于小变形问题,为了简化分析,将微分单元体分别投影到Oxy,Oyz,Ozx 平面来讨论。
显然,单元体变形前各棱边是与坐标面平行的,变形后棱边将有相应的转动,但我们讨论的是小变形问题,这种转动所带来的影响较小。
特别是物体位移中不影响变形的计算,假设各点的位移仅为自身的大小和形状的变化所确定,则这种微分线段的转动的误差是十分微小的,不会导致微分单元体的变形有明显的变化。
3、正应变表达式首先讨论Oxy面上投影的变形。
设ma,mb分别为MA,MB的投影,m'a',m'b'分别为M'A',M'B',即变形后的MA,MB的投影。
微分单元体的棱边长为d x,d y,d z,M点的坐标为(x,y,z),u(x,y,z),v(x, y, z)分别表示M点x,y方向的位移分量。
则A点的位移为u(x+d x,y,z),v(x+d x,y,z),B点的位移为u(x,y+d y,z),v(x,y+d y,z)。
按泰勒级数将A,B两点的位移展开,并且略去二阶以上的小量,则A,B点的位移分别为因为所以同理可得由此可以得到弹性体内任意一点微分线段的相对伸长度,即正应变。
显然微分线段伸长,则正应变εx, εy, εz大于零,反之则小于零。
4、切应变分量以下讨论切应变表达关系。
假设βyx为与x轴平行的微分线段ma向y轴转过的角度,βxy为与y轴平行的mb向x轴转过的角度。
则切应变因为上式的推导中,利用了小变形条件下位移的导数是高阶小量的结论。
同理可得βyx和βxy可为正或为负,其正负号的几何意义为:βyx大于零,表示位移v随坐标x而增加,即x方向的微分线段正向向y轴旋转。
将上述两式代入切应变表达式,则同理可得切应变分量大于零,表示微分线段的夹角缩小,反之则增大。
5、几何方程与应变张量综上所述,应变分量与位移分量之间的关系为上述公式称为几何方程,又称柯西方程。
柯西方程给出了位移分量和应变分量之间的关系。
如果已知位移,由位移函数的偏导数即可求得应变;但是如果已知应变,由于六个应变分量对应三个位移分量,则其求解将相对复杂。
这个问题以后作专门讨论。
几何方程给出的应变通常称为工程应变。
如果使用张量符号,则几何方程可以表达为上式表明应变分量εij将满足二阶张量的坐标变换关系,应变张量分量与工程应变分量的关系可表示为§3.2 纯变形位移与刚性转动位移学习思路:应变分量通过位移的偏导数描述了一点的变形,对微分平行六面体单元棱边的伸长以及棱边之间夹角的改变做出定义。
但是这还不能完全描述弹性体的变形,原因是没有考虑微分单元体的刚体转动。
通过分析弹性体内无限邻近两点的位置变化,则可得出刚体的转动位移与纯变形位移之间的关系。
刚体转动通过转动分量描述。
刚性转动位移的物理意义:如果弹性体内某点没有变形,则无限邻近它的任意一点的位移由两部分组成,平动位移和转动位移。
如果发生变形,位移中还包括纯变形位移。
学习要点:1、刚体转动位移;2、转动位移分量;3、纯变形位移与转动位移;4、位移的分解。
1、刚体转动位移应变可以描述一点的变形,即对微分平行六面体单元棱边的伸长以及棱边之间夹角的改变做出定义。
但是这还不足以完全描述弹性体的变形,原因是应变分析仅仅讨论了棱边伸长和夹角变化,而没有考虑微分单元体位置的改变,即单元体的刚体转动。
通过分析弹性体内无限邻近两点的位置变化,则可得出刚体的转动位移与纯变形位移之间的关系。
设P点无限邻近O点,P点及其附近区域绕O作刚性转动,转过微小角度。
设转动矢量为ω,OP之间的距离矢量为 ,如图所示。
则引入拉普拉斯算符矢量2、转动位移分量设P点的位移矢量为U,有U =u i +u j +u k由于位移矢量可以表示为U =ω×ρ ,所以即其中ωx, ωy, ωz为转动分量,是坐标的函数,表示了弹性体内微分单元体的刚性转动。
3、纯变形位移与转动位移设M点的坐标为(x,y,z),位移(u,v,w)。
与M点邻近的N点,坐标为(x+d x,y+d y,z+d z),位移为(u+d u,v+d v,w+d w)。
则MN两点的相对位移为(d u,d v,d w)。
因为位移为坐标的函数,所以同理可得以上位移增量公式中,前三项为产生变形的纯变形位移,后两项是某点邻近区域的材料绕该点像刚体一样转动的刚性转动位移。
刚性转动位移的物理意义为,如果弹性体中某点及邻近区域没有变形,则与某点无限邻近这一点的位移,根据刚体动力学可知,是由两部分组成。
分别是随这点的平动位移和绕这点的转动位移。
对于弹性体中某一点,一般还要发生变形,因此位移中还包括纯变形位移。
4、位移的分解总得来讲,与M点无限邻近的N点的位移由三部分组成的:1、随同M点作平动位移。
2、绕M点作刚性转动在N点产生的位移。
3、由于M点及其邻近区域的变形在N点引起的位移。
转动分量ω x, ω y,ω z 对于微分单元体,描述的是刚性转动,但其对于整个弹性体来讲,仍属于变形的一部分。
三个转动分量和六个应变分量合在一起,不仅确定了微分单元体形状的变化,而且确定了方位的变化。
位移增量公式如果使用矩阵形式表示,可得显然,位移的增量是由两部分组成的,一部分是转动分量引起的刚体转动位移,另一部分是应变分量引起的变形位移增量。
§3.3 应变的坐标变换与应变张量学习思路:与应力状态分析相同,一点的应变分量在不同坐标系下的描述是不相同的,因此讨论应变状态,就必须建立坐标变换,就是坐标转动时的应变分量变换关系。
本节通过新坐标系与旧坐标系之间的位移变换关系式,根据几何方程,通过复合函数的微分,就可以得到应变分量的转轴公式。
转轴公式表明应变张量也是二阶对称张量。
根据转轴公式,一点的六个独立的应变分量一旦确定,则任意坐标系下的应变分量均可确定,即应变状态完全确定。
应变状态分析表明:坐标变换后各个应变分量均发生改变,但是作为一个整体,一点的应变状态是不会改变的。
学习要点:1、坐标变换;2、应变分量坐标转轴公式;3、应变张量。
1、坐标变换上一节我们引入了应变分量,本节将讨论不同坐标系下一点的应变分量的关系。