二人形机器人精品PPT课件
- 格式:ppt
- 大小:7.95 MB
- 文档页数:49
人形机器人基础知识嘿,朋友们!今天咱来聊聊人形机器人那些事儿。
你说人形机器人像不像个超级厉害的“变形金刚”?只不过它们不是为了拯救世界,而是来帮助我们生活变得更美好的呀!想象一下,有个和人长得差不多的家伙,能帮你干各种活儿。
它可以帮你打扫房间,那动作说不定比你还利落呢!就像家里多了个不知疲倦的小助手。
而且它还能陪你聊天,不管你说啥,它都能接上话,这可比有些朋友靠谱多啦,哈哈!人形机器人的身体构造可复杂了呢。
那一双双灵活的“手”,可以完成各种精细的动作,简直就像魔术师一样神奇。
还有那能自由转动的“脑袋”,仿佛藏着无数的智慧。
它们的“眼睛”虽然不是真的眼睛,但却能看清周围的一切,比我们的眼睛还厉害呢!它们的“腿”能带着它们到处走,想去哪儿就去哪儿,多自由啊!再说说它们的“大脑”,那里面装着满满的知识和技能。
它们能快速地学习新东西,就像一块永远吸不满水的海绵。
你教它做一件事,它很快就能学会,然后做得又快又好。
这要是放在咱学习上,那不得个个都是学霸呀!人形机器人在好多地方都大显身手呢。
在工厂里,它们可以不知疲倦地工作,生产出各种产品,提高了效率,还降低了成本呢。
在医院里,它们可以帮忙照顾病人,给病人送药、送饭,多贴心呀!在一些危险的地方,比如火灾现场或者核辐射区域,它们可以代替人类去冒险,保护我们的安全,多勇敢啊!不过呢,人形机器人也不是完美无缺的。
它们有时候也会犯糊涂,做出一些让人哭笑不得的事情。
但这也正是它们可爱的地方呀,不是吗?那我们该怎么和人形机器人相处呢?这可得好好想想。
我们不能把它们当成纯粹的工具,而要把它们当成朋友。
和它们友好地交流,尊重它们。
它们虽然是机器,但也是有“感情”的呢。
总之,人形机器人是个很神奇的东西。
它们让我们的生活变得更加丰富多彩,更加便利。
我们要好好利用它们,让它们为我们服务,同时也要和它们和谐相处。
难道不是吗?人形机器人的未来一定会更加精彩,让我们一起期待吧!。



人形机器人第三节课一,科普知识(30分钟)马达的发展历史直流电机的产生与形成1820年丹麦物理学家奥斯特(Hans Christian Oersted, 1777-1851)发现了电流磁效应:将导线的一端和伽伐尼电池正极连接,导线沿南北方向平行地放在小磁针上方,当导线另一端连接到负极时,磁针立即指向东西方向。
把玻璃板、木片、石块等非磁性物体插在导线和磁极之间,甚至把小磁针浸在盛水的铜盒子里,磁针照样偏转随后安培通过总结电流在磁场中所受机械力的情况建立了安培定律。
1821年9月法拉第发现通电的导线能绕永久磁铁旋转以及磁体绕载流导体的运动,第一次实现了电磁运动向机械运动的转换,从而建立了电动机的实验室模型,被认为是世界上第一台电机,其原理如图1所示,在一个盘子内注入水银,盘子中央固定一个永磁体,盘子上方悬挂一根导线,导线的一端可在水银中移动,另一端跟电池的一端连接在一起,电池的另一端跟盘子连在一起,构称导电回路,载流导线在磁场中受力运动。
1822年,法国的阿拉戈盖吕萨克发明电磁铁,即用电流通过绕1线的方法使其中铁块磁化。
1825年,斯特企(W.sturgeon)用16圈导线制成了第一块电磁铁。
1829年,美因电学家亨利对斯特金电磁铁装置进行了一些革新,绝缘导线代替裸铜导线,因此不必担心被铜导线过分靠近而短路。
由于导线有了绝缘层,就可以将它们一圈圈地紧紧地绕在一起,由于线圈越密集,产生的磁场就越强,这样就大大提高了把电能转化为磁能的能力。
到了1831年,亨利试制出了一块更新的电磁铁,虽然它的体积并不大,但它能吸起1吨重的铁块。
1826年德因G.S欧姐提出电路实验定律一一欧姐定律。
1831年,法拉第发现了电磁感应现象之后不久,他又利用电磁感应发明了世界上第一台真正意义上的电机-法拉第圆盘发电机。
亨利的电动机的重要意义在于这是第一次展示了由磁极排斥和吸引产生的连续运动,是电磁铁在电动机中的真正应用1832年,斯特金发明了换向器,据此对亨利的振荡电动机进行了改进,并制作了世界上第一台能产生连续运动的旋转电动机。


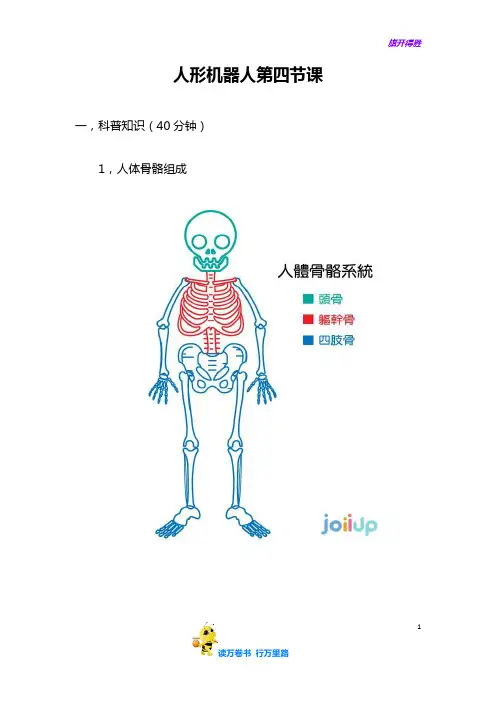
人形机器人第四节课一,科普知识(40分钟)1,人体骨骼组成1人体共有206块骨骼,分为颅骨、躯干骨和四肢骨3个大部分。
其中,有颅骨29块、躯干骨51块、四肢骨126块。
儿童的骨头实际上应是217~218块,初生婴儿的骨头多达305块,因为:儿童的骶骨有5 块,长大成人后合为1块了。
儿童尾骨有4~5块,长大时也合成了1块。
儿童有2块髂骨、2块坐骨和2 块耻骨,到成人就合并成为2块髋骨了。
这样加起来,儿童的骨头要比大人多11~12块。
2,人体各部位名称233,人体运动学原理(本课只讲解第一部分内容,即人体机械运动的特点,余下内容以后课次会逐一讲解一部分)人体机械运动的特点:人体机械运动受人的意识支配,是思维这一高级运动的外部表现和直接目的,因此具有高级运动的本质;人体机械运动将受到中枢神经系统等生物学因素的控制、调节和制约。
由于人体结构是多环节的链式机构,因此人体机械运动将表现出多样性和复杂性,为了达到预定目标所进行的运动方式并不是唯一的。
同时,人体在运动过程中,既受到自身生物学因素的制约,又受到力学因素和运动规律等的制约。
因此,在体育运动中,存在着合理的和最佳的人体机械运动形式,即合理的动作技术原理和最佳运动技术。
1、运动的相对性:自然界中所有的物体都是不断运动和变化的,运动是绝对的。
对于同一物体的运动,参考系的选取不同,对它运动的描述也不同,即在不同的参考系中,对同一物体的运动具有不同的描述,这一事实称为运动的相对性。
42、人体的运动形式:人体是非常复杂的,人体的运动也是复杂的。
如果将人体进行不同的简化(即质点或刚体),那么人体的运动形式将不同。
将人体简化为质点,人体的运动形式有直线运动(包括匀速直线运动和变速直线运动),曲线运动(包括斜抛运动和圆周运动);将人体简化为刚体,人体的运动形式有平动、转动和复合运动(平面运动)三种。
3、人体运动学特征量(参数):就是人体或人体标志点的运动时间、空间位置,速度、加速度,人体各环节的转动角度,角速度,角加速度等物理量。

人形机器人第十三节课一,科普知识1,帧帧就是影像动画中最小单位的单幅影像画面,相当于电影胶片上的每一格镜头。
一帧就是一副静止的画面,连续的帧就形成动画,如电视图象等。
帧数就是在1秒钟时间里传输的图片的量,也可以理解为图形处理器每秒钟能够刷新几次,通常用fps(Frames Per Second)表示。
每一帧都是静止的图象,快速连续地显示帧便形成了运动的假象。
高的帧率可以得到更流畅、更逼真的动画。
帧数(fps) 越高,所显示的动作就会越流畅。
但是文件大小会变大。
122,关于“人眼不能分辨超过每秒30帧的画面是因为人眼的视觉残留特性:是光对视网膜所产生的视觉在光后,仍保留一段时间的现象,其具体应用是电影的拍摄和放映。
原因是由元的造成的。
其时值是二十四分之一秒。
是动画、电影等视觉媒体形成和传播的根据。
当物体在快速运动时, 当人眼所看到的影像消失后,人眼仍能继续保留其影像1/24秒左右的图像,这种现象被称为视觉暂留现象。
是人眼具有的一种性质。
人眼观看物体时,成像于视网膜上,并由视神经输入人脑,感觉到物体的像。
但当物体移去时,视神经对物体的印象不会立即消失,而要延续1/24秒左右的时间,人眼的这种性质被称为“眼睛的视觉暂留”。
就是说,无论你游戏帧率有多高,60帧或120帧,最后我们仅仅能分辨其中的30帧而已。
3,24帧的由来在最早的电影里面,一幅静止的图像被称做一"帧(Frame)",影片里的画面是每一秒钟有24帧,为什么是24帧,这个数字是怎么来的,因为人类眼睛的视觉暂留现象正好符合每秒24帧的标准,所以用多也没有意义还会浪费电影胶片,增加成本,所以就是24帧。
这个24帧/秒就是电影胶片常用的格式,也就是说,拍一秒钟的电影那个胶片走24格,说白了想照相机拍24张底片。
少了的话,人的视觉暂留是0.01秒,人感觉不到移动。
3二,编程学习1,尝试编制机器人做俯卧撑的动作2,做剪子包袱锤的游戏石头:剪子:布:比赛规则:4旗开得胜a.制作表示石头/剪子/布的动作。