变速变桨距风力发电机组控制策略改进与仿真
- 格式:pdf
- 大小:967.91 KB
- 文档页数:5
风力机变桨距机构的设计及仿真摘要:本文首先介绍了风力机变桨距机构的原理,在此基础上对风力机变桨距机构进行分析和设计。
通过虚拟样机技术,利用SolidWorks软件建立了风力机变桨距机构的各零、部件的实体模型,并进行装配。
然后将装配好的变桨距虚拟样机模型生成Parasolid(*.x_t)格式,导入动态仿真模拟软件ADAMS中,通过在ADAMS/View中对模型进行相应的定义,完成变桨距机构的运动仿真。
最后对仿真结果进行了后处理,为进一步优化设计做准备。
关键词:变桨距机构;SolidWorks设计;ADAMS仿真Designing and Simulating on the Variable Propeller Pitch Mechanism of WindTurbine-generatorAbstract:This paper first describes the Principles of wind turbine pitch from agencies,On this basis Variable pitch wind turbine analysis and design agencies.Through virtual prototyping technology,Using SolidWorks software to establish a solid model of wind turbine pitch from each institution zero components And assembly,Then the assembled pitch virtual prototype model generation Parasolid (*. x_t) Format,Importing dynamic simulation software ADAMS.By ADAMS / View in the corresponding definition of the model, Completion of the pitching motion simulation from institutions,Finally, the simulation results post-processing, in order to further optimize the design to prepare.Key words:Variable pitch mechanism;SolidWorks design;ADAMS simulation1.引言随着风力发电机技术的不断成熟风力发电机的自动化程度提高,变桨距控制型风力发电机的优越性显得更加突出和必要[1]。
变速恒频风力发电机组建模、仿真及其协调优化控制的开题报告一、课题背景随着世界发展的需求以及环保意识的不断增强,清洁能源的应用越来越为人们所关注。
其中,风能在不污染环境的前提下,能够提供可靠稳定且可预测的电能,成为清洁能源的重要组成部分。
在风力发电中,变速恒频技术是当前应用比较广泛的一种技术。
它通过对风力发电机的轴速进行调整来控制输出功率,从而适应不同的风速条件。
然而,变速恒频风力发电系统本身也存在着一些问题。
例如,转子振动、电网电压波动、电力系统的稳定性等方面都需要进行优化控制。
因此,针对变速恒频风力发电系统的建模仿真以及协调优化控制具有较高的研究价值。
二、研究内容本课题的主要研究内容包括:1. 变速恒频风力发电机组的建模:通过分析变速恒频风力发电机组的结构和工作原理,建立相应的数学模型,包括机械模型、电气模型和控制模型。
2. 变速恒频风力发电机组的仿真:利用Matlab/Simulink等仿真软件,对所建立的数学模型进行仿真,验证模型的正确性和可行性。
3. 协调优化控制策略:设计协调优化控制策略来克服电力系统中存在的问题,包括电网电压波动、电力系统的稳定性等方面。
4. 优化控制方案的实现:将协调优化控制方法应用到实际变速恒频风力发电系统中,验证其有效性和鲁棒性。
三、研究意义通过对变速恒频风力发电机组进行建模、仿真和协调优化控制,可以实现对风力发电系统的优化控制,提高风力发电系统的性能和效率,减少对电网的影响,并推动清洁能源的发展。
同时,本课题的研究结果可以为其他相关领域的研究提供参考,如微电网和智能电网等。
四、研究方法本课题的研究方法主要包括:1. 理论分析方法:通过对变速恒频风力发电机组的机械、电气和控制等方面进行详细的理论分析,建立相应的数学模型。
2. 数值仿真方法:利用Matlab/Simulink等仿真软件对所建立的数学模型进行仿真,验证模型的正确性和可行性。
3. 实验方法:将协调优化控制方法应用到实际变速恒频风力发电系统中,通过实验对优化控制方案进行验证。
风力机统一变桨距执行机构虚拟设计及仿真
随着风力发电技术的不断发展,风力机成为一种重要的可再生能源发电设备。
风力机的变桨系统是其关键组成部分之一,能够提高风力机的发电效率和控制风机在复杂环境中的安全性能。
因此,设计一种高效、稳定的变桨距执行机构是风力机研究的重要方向之一。
在现代工程设计中,虚拟设计和仿真技术已经成为不可或缺的重要工具。
针对变桨距执行机构的虚拟设计和仿真可以有效地降低试错成本和开发时间,并且可以提高系统的可靠性和性能。
在进行虚拟设计和仿真之前,需要确定变桨距执行机构的功能需求和性能指标。
然后通过数学模型和仿真软件来模拟和分析机构的运动学、动力学和控制。
最终,可以通过虚拟实验来验证机构设计的性能指标,根据仿真结果对机构进行优化设计。
总之,风力机变桨距执行机构的虚拟设计和仿真是现代工程设计的重要手段,它可以有效地促进风力机的发展,并为提高风能利用率做出贡献。
变速变桨风力发电机组的优化控制随着清洁能源的兴起,风力发电的应用越来越普遍。
然而,风力发电的效率受到风速的影响,不稳定因素较多,因此如何优化控制风力发电机组依然是一个亟待解决的问题。
变速变桨控制技术是目前风力发电机组最常用的控制技术之一,本文将探讨变速变桨风力发电机组的优化控制。
一、变速变桨技术概述1.1 变速控制传统的定速风力发电机组通过控制电网电压和频率来确保输出功率稳定,但其效率较低,因此相对而言较少使用。
变速控制是指通过控制旋转叶片的转速来调整输出功率。
旋转叶片的转速会受到风速的影响,因此需要根据实时的风速来调整转速。
一般来说,当风速越大的时候,需要调整输出功率,因此需要提高转速;当风速越小的时候,需要降低转速以保证输出功率不变。
1.2 变桨控制变桨控制是指通过调整旋转叶片的角度来控制发电机组的输出功率。
旋转叶片的角度会影响叶片所受到的空气阻力和风速之间的关系,因此可以通过调整叶片的角度来调整输出功率。
一般来说,当风速越大的时候,需要调整叶片的角度以降低空气阻力从而保证输出功率不变;当风速越小的时候,需要调整叶片的角度以增加叶片所受到的空气阻力来提高输出功率。
二、变速变桨优化控制2.1 变速变桨联合控制变速变桨联合控制是指将变速控制和变桨控制结合起来,以实现更精确的输出功率控制。
当风速较高时,变桨控制通过调整叶片的角度来减小空气阻力,从而降低发电机组的输出功率;当风速较低时,变桨控制通过调整叶片角度来增加空气阻力,从而提高发电机组的输出功率。
而当风速在一定的范围内变化时,变速控制则通过调整发电机组的转速来进行功率控制。
2.2 基于模型预测控制的优化控制基于模型预测控制的优化控制是一种基于数学模型的高级控制方法,能够实现精确的功率控制并减少疲劳损伤。
该方法将实时的风速数据作为控制输入,通过预测未来一段时间内的风速变化情况,来调整发电机组的输出功率。
该方法需要实时采集数据,并根据历史数据建立数学模型,从而能够根据风速的变化趋势来实现优化控制。

2023-11-10CATALOGUE 目录•风力发电机组简介•变桨距控制策略的基本理论•变桨距控制策略的实现方法•变桨距控制策略的优化方法•变桨距控制策略在实际中的应用及案例分析01风力发电机组简介风力发电机组的基本构造风力发电机组的核心部件,由叶片和轮毂组成,用于捕捉风能并将其转化为机械能。
风轮齿轮箱发电机塔筒连接风轮和发电机的重要部件,将风轮的转速提升到发电机所需的速度。
将机械能转化为电能的重要部件,由定子和转子组成。
支撑风轮和发电机的高耸结构,通常由钢铁或混凝土制成。
风力发电机组通过旋转的风轮捕捉风的动能,并将其转化为机械能。
风的捕捉机械能的转化电能的产生机械能通过齿轮箱的传递,将转速提升到发电机所需的速度。
发电机将机械能转化为电能,通过电缆输送到电网。
03风力发电机组的运行原理0201按风向分类水平轴风力发电机组和垂直轴风力发电机组。
水平轴风力发电机组的风轮轴与地面平行,而垂直轴风力发电机组的风轮轴与地面垂直。
风力发电机组的分类按容量分类小型、中型和大型风力发电机组。
小型风力发电机组的功率通常在几百瓦到几千瓦之间,中型风力发电机组的功率在几兆瓦到几十兆瓦之间,而大型风力发电机组的功率通常在几百兆瓦到几兆瓦之间。
按运行原理分类恒速风力发电机组和变速风力发电机组。
恒速风力发电机组的风轮转速保持不变,而变速风力发电机组的风轮转速可以根据风速进行调整。
02变桨距控制策略的基本理论变桨距控制是一种用于调节风力发电机组功率输出的技术,通过改变桨叶的桨距角实现对风能捕获的优化控制。
在风速较高时,通过减小桨距角增加风能捕获,以提升发电机组的功率输出;在风速较低时,通过增大桨距角减小风能捕获,以避免过度捕获风能导致发电机组振动和疲劳损坏。
变桨距控制的概念和意义变桨距控制系统的基本结构变桨距控制系统主要由传感器、控制器和执行器组成。
传感器负责监测风速、风向和发电机组运行状态;控制器根据传感器信号和预设的控制逻辑对执行器进行指令输出;执行器根据指令调整桨叶的桨距角。
变速变桨距风力发电系统功率优化与控制方法研究现代社会能源问题日渐严重和生态环境问题频发,开发利用可再生能源对改善生态问题有着极为重要的作用。
其中风能具有分布广泛、储量丰富和利用方便等特点,成为现阶段发展速度最快和最具有发展前景的可再生能源之一。
风电技术中风力发电系统的功率优化与控制方法研究也成为研究的重点。
选用双馈风力发电系统为研究对象,通过分析风力发电系统的基本组成结构和运行状态,提出了全风速段双模控制策略。
并且建立了变速变桨距风力发电系统的数学模型和模拟风速的仿真模型,为验证控制策略的有效性提供仿真环境。
针对风力发电系统在额定风速以下运行时的最大风能捕获问题,分别采用爬山搜索法和改进极值搜索法进行风电系统的最大风能捕获控制。
改进极值搜索法通过运行点相位信息来进行搜索,并通过改进积分器实现变步长快速追踪稳定运行的控制目标。
仿真结果表明:改进极值搜索法能够使系统快速地跟踪风速变化,保持最佳叶尖速比,提高了风能利用系数和风能的利用效率。
针对风力发电系统在额定风速以上运行时保持恒功率运行问题,分别采用常规PID和模糊自适应PID变桨距控制。
通过模糊控制器来实时整定PID控制器的三个参数,提高了变桨距控制系统的动态响应特性,使系统的输出功率更加稳定,同时降低了系统的机械载荷,保证了风电系统的平稳安全运行。
针对风力发电系统的功率优化与控制问题,提出了在全风速段以两种控制模式运行的控制策略。
对风力发电系统的运行风况进行以额定风速为准的高低两种风况的判别,低风速段采用基于改进极值搜索法的最大风能捕获控制;高风速段采用基于模糊自适应PID变桨距控制。
通过仿真效果来看,针对不同的风况条件,实现了风力发电系统功率的优化与控制,能够使系统快速响应,有效提高了风能利用效率和恒功率运行的稳定性,既提高了风力发电系统经济效益又保证了安全稳定运行。
图36幅;表8个;参44篇。
这里基于一种新型的变距机构-电作动筒变桨进行了矢量环建模与MATLAB动态仿真分析。
1变桨距控制原理从能量转换的角度看,风力发电的原理是利用风轮转子将风能转化为机械能,再通过转轴、增速箱带动发电机旋转从而将机械能转化为电能。
其中风力机的功能是将风能转换为机械能。
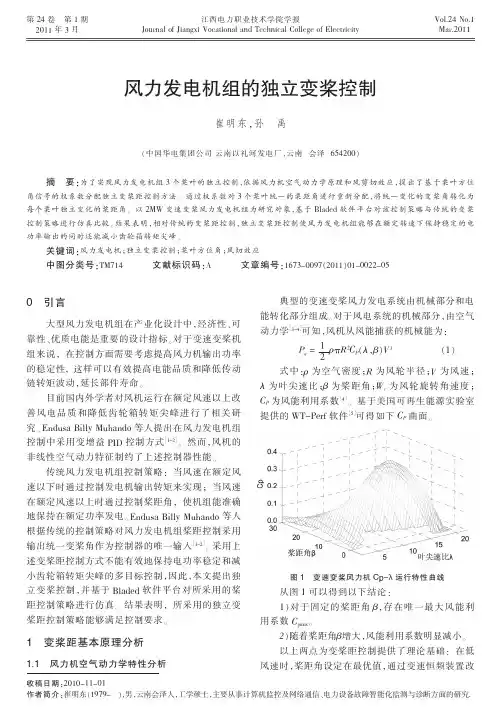
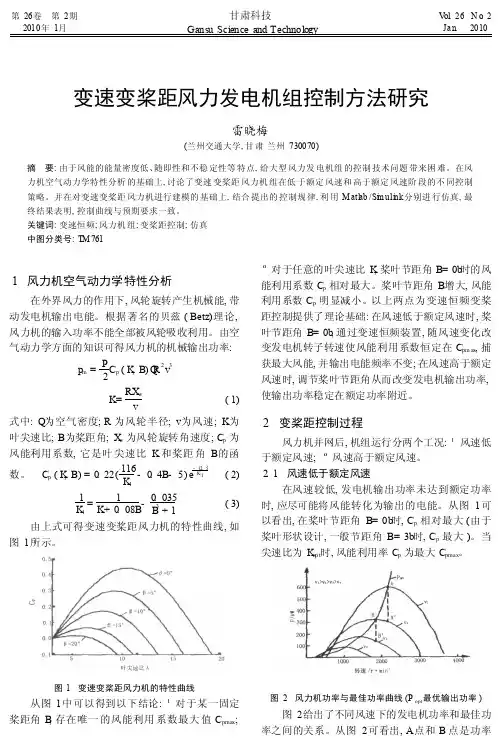
由于流经风轮转子后的风速不可能为变为零,所以通过风轮扫掠面积内的全部风能不可能被风轮转子全部捕获,存在一个风能利用系数:Cp=P12!・A・v3(1)其中:P—单位时间内风轮吸收的机械能;!—空气密度,单位:mg/m3;A—风轮叶片扫掠面积,单位:m2;v—风速(指未扰动气流的流速),单位:m/s。
CP最大值为0.593,此即为有名的贝兹极限[1]。
变桨距风力机的风能利用系数CP与叶尖速比λ和桨叶的节距角β成非线性关系。
叶尖速比λ即为桨叶尖部的线速度与风速之比:λ=2!Rnv=$Rv(2)式中:ω—风轮在风速为v时的旋转角速度,单位:rad/s;R—风轮半径,单位:m;n—转速,单位:r/s;v—风速,单位:m/s据有关资料记载和研究[2][3],风能利用系数CP可近似表示:CP=(0.44-0.0167#)sin!("-3)15-0.3#!"-0.00184("-3)#(3)如图1、图2所示:图1Cp(λ,β)图2βx时的Cp(λ)0.50.40.30.20.10-0.1-0.2-0.3-0.4-0.5Cpβ(deg)135791113151173-1-5风力发电机组电动变桨距机构设计与仿真李志梅1,2魏本建1赵东标2(1沙洲工学院机电系,张家港215600)(2南京航空航天大学机电学院,南京210016)Designandsimulationontheelectricpitch-regulatedmechanismofwindturbine-generatorsystemLIZhi-mei1,2,WEIBen-jian1,ZHAODong-biao2(1DepartmetofMechanicsandElectronics,ShazhouInstituteofTechnology,Zhangjiagang215600,China)(2CollegeofMechanicalandElectricalEngineering,NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,China)############################################$#############$############################################$#############$【摘要】阐述了风力机变桨距控制原理,在此基础上设计了一种新型变桨距机构-电作动筒变距机构,并对其进行了矢量环建模,结合MATLAB/Simulink进行了动态运动仿真及分析,进一步为风力机变桨距系统的优化设计奠定了基础。
风力发电机组独立变桨控制技术仿真与试验研究文|兰杰,莫尔兵,林淑,羊森林,王其君为了实现可持续发展,风能作为一种清洁、可再生能源受到世界各国的广泛关注,已成为重点开发的能源之一。
国内外大型的风电机组大多采用变速变桨技术,变速变桨风电机组的桨距角控制分为统一变桨和独立变桨。
统一变桨控制,即控制系统对三套变桨执行机构执行同一桨距角指令,也是目前机组使用最多的控制方式。
而随着变速变桨风力发电机组容量的增加,风轮直径越来越大,风湍流、风切变、塔影效应、偏航偏差等因素使得整个风轮面受力的不均衡度随之增强,附加载荷也越来越大,严重威胁风电机组的安全运行。
独立变桨控制技术应运而生,通过优化的控制,给每支叶片叠加一个独立的桨距角信号,来降低这些附加的不平衡载荷,以提高系统运行可靠性和稳定性并延长机组使用寿命。
本文的独立变桨控制技术是将叶根应力传感器测量出来的各叶片根部的载荷及风轮方位角,通过滑环传送至所设计的独立变桨控制器以获得独立变桨期望的桨距角,最后将独立变桨期望的桨距角和统一变桨给定的桨距角之和作为风力机三支桨叶桨距角的控制量,以实现风电机组的独立变桨控制器设计,通过仿真和现场试验验证所设计独立变桨控制技术的有效性。
风轮不平衡载荷分析实际运行的风力发电机组由于在不同方位,叶片所受载荷不同,如图1所示。
其中,M y1、M y2、M y3为每支叶片受到的Y向弯矩,也即面外弯矩,M yq和M yd为其分解到旋转正交坐标系上的弯矩,M yaw和M tilt为分解到静止正交坐标系上的弯矩,φ(t)为静止坐标系和旋转坐标系之间的夹角。
从图1、图2可知,若三支叶片的M yi不同,则分解产生的M tilt和M yaw弯矩不为零,从而产生了整个风轮的不平衡载荷。
独立变桨控制要控制转速,即保证三支叶片受到的M x 总和不变,这样风轮的扭矩基本保持不变,不会影响机组的发电效率,同时要减小叶轮上不均衡载荷,仅在每只叶片上叠加一个周期变化的分量,该分量均值为零,近似呈正弦变化,在一个旋转周期内,平均变化量为零,这样就减小了旋转坐标系下的M yd和M yq,也即静止坐标系下的M yaw 和M tilt。
风力发电机组变桨距控制策略研究xx年xx月xx日contents •引言•风力发电机组变桨距控制系统概述•基于优化算法的变桨距控制策略研究•基于模糊逻辑的变桨距控制策略研究•基于神经网络的变桨距控制策略研究•变桨距控制策略实验验证与结果分析•结论与展望目录01引言风能作为一种清洁、可再生的能源,在全球能源供应中占据重要地位。
风力发电机组是实现风能转换的重要设备,而变桨距控制策略是提高风能利用率和机组运行稳定性的关键技术。
随着风电技术的不断发展,对风力发电机组变桨距控制策略的研究具有重要意义,可以为提高风电发电效率、降低能源成本、优化能源结构提供技术支持。
研究背景与意义目前,国内外学者针对风力发电机组变桨距控制策略进行了广泛研究,提出了许多不同的控制方法。
早期变桨距控制策略主要采用PID控制器,但PID控制器的参数调整较为复杂,且在风速变化较大时控制效果不佳。
随后,模糊控制、神经网络等智能控制方法逐渐应用于变桨距控制策略中,这些方法能够更好地适应风速的波动和不确定性。
近年来,随着优化算法和机器学习技术的不断发展,基于优化算法的变桨距控制策略和基于机器学习的变桨距控制策略也逐渐成为研究热点。
这些方法通过优化控制参数或利用历史数据对风速进行预测,可以进一步提高风能利用率和机组运行稳定性。
研究现状与发展本研究旨在研究一种基于优化算法的变桨距控制策略,以提高风能利用率和机组运行稳定性。
具体研究内容包括1. 研究风力发电机组变桨距控制的数学模型,建立相应的仿真模型;2. 基于优化算法对变桨距控制策略进行优化,选取合适的优化目标函数,并确定优化参数;3. 对优化后的变桨距控制策略进行仿真研究,分析其控制效果和机组运行性能;4. 对优化后的变桨距控制策略进行实验验证,以评估其实践应用价值。
研究内容与方法02风力发电机组变桨距控制系统概述风力发电机组结构风力发电机组主要由风轮、齿轮箱、发电机、塔筒等组成。
工作原理风力发电机组利用风能驱动风轮旋转,通过齿轮箱将风轮的旋转动力传递到发电机,从而转化为电能。
变速变桨距风力发电机组控制策略改进与仿真刘 军,何玉林,李 俊,黄 文(重庆大学机械传动国家重点实验室,重庆市400030)摘要:在分析变速变桨距风力发电机组基本控制策略的基础上,提出一种扩大过渡区的改进控制策略,用来消除额定功率运行点附近切换造成的功率波动及突变载荷等不利影响。
依据改进的控制策略设计了3个控制器平滑过渡方案,实现对该策略的最佳跟踪。
运用MAT LAB 仿真平台模拟了改进控制策略下的风力发电机组运行特性,结果表明了改进控制策略的正确性及控制器设计的有效性。
关键词:风力发电机组;变速变桨距;控制策略;扩大过渡区;平滑控制收稿日期:2010 06 23;修回日期:2010 10 09。
重庆市科技攻关重点项目(CST C2007A A3027)。
0 引言风力发电机组的控制技术由原来单一的定桨距失速控制转向变桨距变速控制,目的是为了防止风能转换系统承受的载荷过重,从风场中最大限度地捕获能量以及为电网提供质量较好的电能。
然而,风力发电机组作为一种复杂的、多变量、强耦合、非线性的系统,要想减小风力机载荷以延长其使用寿命,抑制功率波动以降低对电网的不利影响,控制策略的选取及控制器的设计至关重要[1 6]。
本文通过对变速变桨距风力发电机组基本控制策略的分析,针对过渡区运行过程中出现的功率波动大及突变载荷强等情况,提出一种改进的控制策略来减缓此种影响。
为最佳跟踪改进的控制策略,设计了3个控制器以实现3个运行区间的平滑过渡。
同时应用M ATLAB 仿真平台对变速变桨距风力发电机组运行特性进行了仿真,结果表明了所提出方案的合理性和可行性。
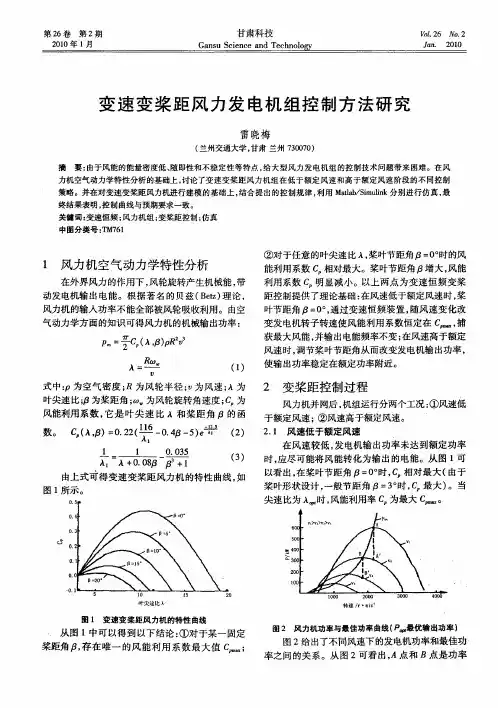
1 基本的变速变桨距控制策略如图1所示,在转速 转矩平面图中,曲线A BC 描述了变速变桨距风力发电机组的基本控制策略。
在低风速区,风电机组从切入风速为V in 的A 点到风速为V N 的B 点,沿着C pmax 曲线轨迹运行,此区间称为恒C p 运行区。
由于在B 点发电机转速达到了其上限值 N ,当风速从V N 上升到V N 时,转速将恒定在 N ,提升发电机转矩使风电机组达到其额定功率,在图1中为BC 段,也称为恒转速区或过渡区。
当风速超过额定风速V N 时,变桨距系统将开始工作,通过改变桨距角保持功率的恒定,风电机组将持续运行在C 点,直到风速超过切出风速V out ,此区间称为恒功率区,而此区间内桨距角控制方式采用统一桨距控制,它是指风力机所有桨距角均同时改变相同的角度[7 8]。
在此需要注意的是:若最大功率P N 曲线与C pmax 曲线的相交点在额定转速极限值左侧,就会造成风电机组在未达到额定转速时,已进入失速状态,相应的A B 区间将被缩小,这时就需对整个风电机组额定点进行重新选取。
图1 变速变桨距风力发电机组控制策略Fig.1 C ontrol strategy of the variable speed pitch controlled wind turbine driven generator system从图1可以看出,3个区间工作点的划分非常明显,而控制器的设计与工作点的选取有着必然的联系,因此,基本的变速变桨距风电机组通常会设计2个独立的控制器,一个用来跟踪参考速度,另一个用来跟踪额定功率。
由于2个控制器都有各自的控制目标,在运行过程中相互独立,然而在工作点附近,2个控制器又相互制约,这种制约就会导致风电机组在C 点控制系统的调节能力下降,在突遇阵风82 第35卷 第5期2011年3月10日Vo l.35 N o.5M ar.10,2011等情况时,会产生较大的功率波动及较强的瞬间载荷。
导致这种情况发生的根源在于风速低于额定值时,风电机组通常以最佳桨距角运行,为了克服风速突然增大时的气动转矩,抵消过量的功率,需大幅度改变桨距角,然而,这种变动因为变桨装置自身的特性而被限制。
因此,为了更好地控制气动转矩,提高风电机组的整体控制能力,需对控制策略进行改进。
2 改进的变速变桨距控制策略改进的变速变桨距控制策略如图1中曲线AE F 所示。
改进策略与基本策略的不同之处在于:过渡区出现的调整是以风速V 1开始,风速V 2结束的,而转速和桨距角的改变方式也发生了变化。
这些改变可以在图2中表现出来。
图2 改进控制策略下风力发电机组特性Fig.2 Operation characteristics of wind turbine driven generator system with the improved control strategy在低风速区,控制策略基本不变,保持恒定功率系数C p 运行,但当风速达到V 1时,进入过渡区运行。
在过渡区,转速将以更小的斜率随风速的增加而增加,同时为了提高工作点的控制力,桨距角也随着风速的增加而线性增加,当风速达到V 2时,过渡区结束。
很明显,V 1<V N ,V 2>V N ,过渡区被扩大,相应的稳态功率曲线的斜率d P/d V 减小,针对速度区间 V,功率的变化量 P =d Pd VV 也就减小,那么功率波动就会相应减小,瞬间载荷也相应被减缓。
风速高于V 2时,依然采用变桨距控制方式,但采用更为先进的独立变桨距控制方式。
独立变桨距控制是在统一变桨距控制基础上发展起来的新型变桨距控制理论,它将每支叶片作为独立的控制对象,依据各自的控制规律独立地改变桨距角,以达到更好的减缓载荷的目的[9 12]。
3 控制器设计要实现对改进的变速变桨距控制策略的最优跟踪,控制器的设计十分重要。
针对改进策略的特点,本文设计了3个控制器。
3.1 低风速区控制器根据空气动力学原理,风力机产生的功率为:P =0.5 R 2C p ( , )V 3(1)式中: 为空气密度;R 为风轮半径;V 为驱动风力机的有效风速; 为叶尖速比, = R /V, 为风轮转速;C p 为风能利用系数,是叶尖速比 和桨叶节距角 的函数,本文采用以下函数[13]进行拟合:C p ( , )=0.22116 i-0.4 -5e -12.5i 1 i =1 +0.08 -0.035 3+1(2)结合式(1)和式(2)可以看出:当桨距角 固定在某一值时,存在一个最佳叶尖速比 opt ,使得风能利用系数C p 值最大,亦即风力机获取的功率最大。
为最大化获取的风能,设计出如图3所示低风速区控制器。
图3 低风速区控制器Fig.3 C ontroller for low wind speed region图中:V^为风速估算值; Z 为发电机实际所需转速输出值; g 为发电机运行转速; ref 为转速参考值,ref =f (V ^)=i opt V ^RV ^<V 1(3)式中:i 为齿轮箱增速比。
图3中的控制算法采用比例 积分(PI)控制算法,则有Z =K P e +K I e (4)式中:K P 为比例增益;K I 为积分增益;e 为发电机转速误差,定义为e = ref - g 。
83绿色电力自动化 刘 军,等 变速变桨距风力发电机组控制策略改进与仿真3.2 过渡区控制器过渡区控制器的设计主要是为了消除瞬间载荷对风力机的冲击。
采用具有转速反馈外环的转矩控制环,运用特定的控制算法和统一变桨距控制方式来实现此区间的控制。
控制器结构如图4所示。
图4 过渡区控制器Fig.4 Controller f or transition region图中:T g 为发电机运行转矩; Z 为实际所需桨距角输出值;转矩参考值T ref 定义为:T ref =g( g )=12 R 3C p g R V ^, Z V ^2V 1 V ^<V 2(5)桨距角的动作属于跟踪控制策略的一种主动变化,由于它的大惯性等特点,另外,为了便于变桨伺服电机的控制,将其设定成与预测风速成线性关系(见图2)。
由于运用风速的估算值来确定发电机转矩时,气动损失、传动链损失等很难得到准确地估算,致使得到的参考转矩不是很精确,所以改用发电机转速作为计算参考转矩的输入,这样可直接对发电机转矩进行计算。
需注意的是,此区间发电机转速与风速的线性斜率已发生变化。
图4中的控制算法采用基于单个神经元的自适应模糊控制算法[14 15],其结构框图如图5所示。
图中:T r (t),e(t),e c (t),e s (t)分别为转矩测量值、误差、误差变化率和误差积分。
图5 单神经元自适应模糊控制器结构Fig.5 Structure of single neuron adaptive fuzzycontroller单神经元自适应模糊控制器是在模糊控制器基础上,利用单个神经元的输出U n (t)来在线调整模糊控制规则查询表,以达到调整控制规则的目的,从而提高系统的自学习和自适应能力,完善系统性能。
对于每一组输入变量e(t)和e c (t)进行模糊量化处理,得到相应的语言变量论域上的模糊集E (t)和E c (t),再根据它们的值查询模糊控制查询表,得到控制量U f (t)的值,此值经过神经元调整为:U z (t)=U n (t)+U f (t)(6)式中:U n (t)为神经元的输出,-1 U n (t) 1;U f (t)为查询模糊控制规则查询表得到的精确控制量。
然后,将所得到的U z (t)存入模糊控制查询表原来U f (t)所在的位置,取代原来的U z (t)值,这样就完成了对模糊控制规则查询表的在线调整。
再将U z (t)乘以比例因子K u ,便得到施加给被控制对象的控制量为:u k (t)=K u U z (t)(7)图5中,单神经元的学习算法通过改变权系数的值来实现,如何调整得到权系数对系统性能有着非常重要的影响,在此令权系数按照误差能量函数的负梯度方向进行修改。
3.3 高风速区控制器当风速达到V 2时,风力发电机组的机械和电气特性也达到其设计极限,随着风速的进一步增大,此时要求发电机的转速和输出功率维持在额定值。
根据风力发电机组的气动特性,增大桨距角可以减小风能利用率,因此,当发电机输出功率大于额定功率时,通过调节桨距角减小发电机的输出功率使之维持在额定值。
另外,在满足额定功率的同时,为更好地减缓风力机所承受的载荷,采用先进的独立变桨距控制技术。
高风速区控制器设计结构见图6。
图6 高风速区控制器Fig.6 C ontroller for high wind speed region图中: 为风轮方位角; i 和 Z i (i =1,2,3)分别为实测桨距角和变桨距所需桨距角;P ref 为风电机组额定功率;P g 为通过发电机转速估算的功率值,定义为:P g =h( g )=3i=112 R 2C p g R V^n , Z i V 3Z i g = NV Z i =V ^(1+0.5sin ( +120 (i -1)))(8)式中:V ^ V 2;V Z i 为单个叶片上的有效风速。