计算机组成原理勘误表
- 格式:doc
- 大小:160.50 KB
- 文档页数:3
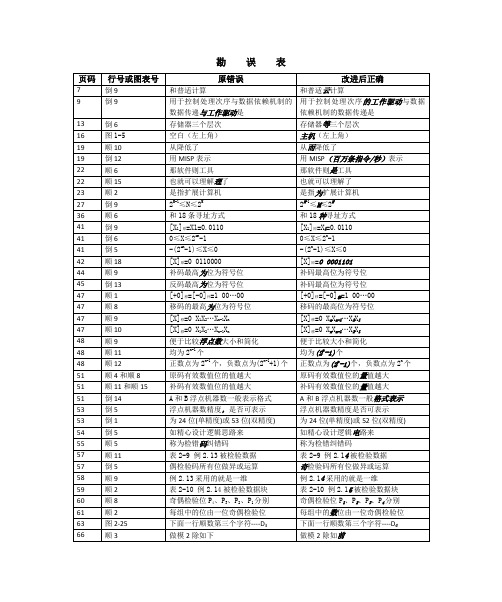
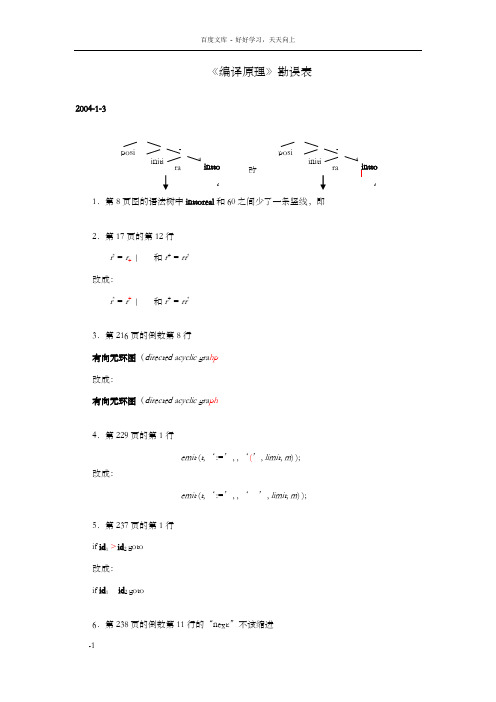
《编译原理》勘误表2004-1-31.第8页图的语法树中inttoreal 和60之间少了一条竖线,即2.第17页的第12行r * = r + | 和r + = rr *改成:r * = r + | 和r + = rr *3.第216页的倒数第8行有向无环图(directed acyclic gra hp改成:有向无环图(directed acyclic gra ph4.第229页的第1行emit (t , ‘:=’, , ‘(’, limit , m ) );改成:emit (t , ‘:=’, , ‘’, limit , m ) );5.第237页的第1行if id 1 > id 2 goto改成:if id 1 id 2 goto6.第238页的倒数第11行的“next:”不该缩进intto + * 6initi ra intto + * 6initi ra改L n-1: S n的代码next:改成:L n-1: S n的代码next:7.第239页的第10行的“next:”不该缩进test: if t = V1 goto L1if t = V2 goto L2. . .if t = V n-1 goto L n-1g oto L nnext:改成:test: if t = V1 goto L1if t = V2 goto L2. . .if t = V n-1 goto L n-1g oto L nnext:8.第239页的第21行的“next:”不该缩进test: case V1 L1case V2L2. . .case V n-1 L n-1case t L nnext:改成:test: case V1 L1case V2L2. . .case V n-1 L n-1case t L nnext:9.第278页的图中极点4到极点3的回边少了箭头310.改成:11.12.2003-12-131.第318页图的最下面的文字在内存中的已完全连接的可执行程序改成:完全连接的可执行代码已在内存中2003-12-61.第270页图的第11行d o j = j (1; while (a[j]> v);改成:do j = j 1; while (a[j]> v);2.第270页图的第(8)条语句(8 ) if t3> v goto (5 )改成:(8 ) if t3< v goto (5 )3.第271页图的第2个方框i f t3> v goto B2改成:if t3< v goto B24.第273页图的第2个方框i f t3> v goto B2改成:if t3< v goto B25.第277页图的第2个方框i f t3> v goto B2改成:if t3< v goto B22003-12-11.第142页第5行E E1 + T E. nptr := mknode ('+', E1. nptr, T. nptr )改成:E E1 + T E. nptr := mknode ('+', E1. nptr, T. nptr )2. 第182页图算法的倒数第2行qui C ksort(1,9)改成:qui c ksort(1,9)2003-10-121.目录第3页第8章代秒生成改成第8章代码生成2.第49页第2行对某个串,存在推导A*A 改成对某个串,存在推导A+A3.第80页第1行若是S*rm Aw *rm12w 改成:若是S*rm Aw rm12w。
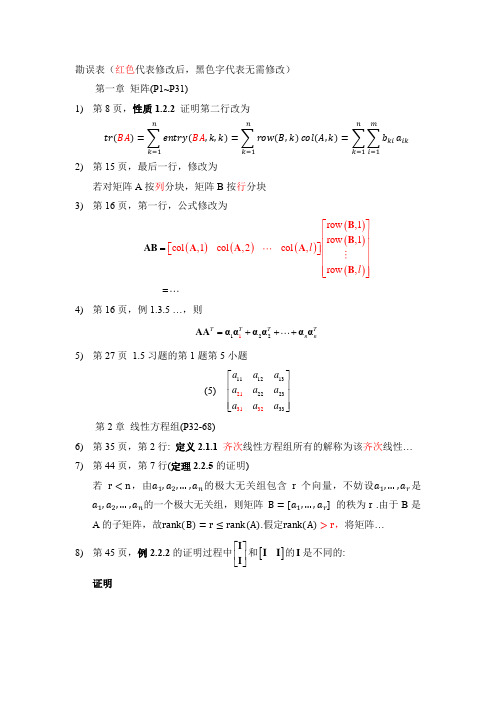
勘误表(红色代表修改后,黑色字代表无需修改)第一章 矩阵(P1~P31)1) 第8页,性质1.2.2 证明第二行改为tr (BA )=∑entry (BA ,k,k )nk=1=∑row (B,k )nk=1col (A,k )=∑∑b ki mi=1nk=1a ik2) 第15页,最后一行,修改为若对矩阵A 按列分块,矩阵B 按行分块 3) 第16页,第一行,公式修改为()()()()()()row ,1row ,1col ,1col ,2col ,row ,l l ⎡⎤⎢⎥⎢⎥⎡⎤⎣⎦⎢⎥⎢⎥⎢⎣⎦=⎥B A B A A A B B =4) 第16页,例1.3.5 …,则1212T TT T n n =+++AA αααααα5) 第27页 1.5习题的第1题第5小题(5) 111213222333321132a a a a a a a a a ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦第2章 线性方程组(P32-68)6) 第35页,第2行: 定义2.1.1 齐次线性方程组所有的解称为该齐次线性… 7) 第44页,第7行(定理2.2.5的证明)若 r <n ,由a 1,a 2,…,a n 的极大无关组包含r 个向量,不妨设a 1,…,a r 是a 1,a 2,…,a n 的一个极大无关组,则矩阵 B =[a 1,…,a r ] 的秩为r .由于B 是A 的子矩阵,故rank (B )=r ≤rank(A).假定rank (A )>r ,将矩阵…8) 第45页,例2.2.2的证明过程中⎡⎤⎢⎥⎣⎦I I 和[]I I 的I 是不同的:证明()[][]()[]()()rank rank rank rank rank rank rank n n mm +⎛⎫⎡⎤= ⎪⎢⎥⎣⎦⎝⎭≤⎛⎫⎡⎤= ⎪⎢⎥⎣⎦⎝⎭⎛⎫⎡⎤≤=+ ⎪⎢⎥⎣⎦⎝⎭A B I A B I A B A 0I I 0B A 0A B 0B9) 第46页,例2.2.3的证明过程有误:证明()()()rank +rank rank rank rank rank rank nk 0ra n n n n n n⎛⎫⎛⎫⎡⎤== ⎪ ⎪⎢⎥⎝⎭⎣⎦⎝⎭⎛⎫⎛⎫⎡⎤⎡⎤== ⎪ ⎪⎢⎥⎢⎥⎣⎦⎣⎦⎝⎭⎝⎭⎛-⎫⎡⎤=≥+ ⎪⎢⎥⎣⎦-⎝⎭-AB AB 0AB 00I I I I I A B B 0A B B 0B A A10) 第68页,第49题第(1)小题修改为:49. 设α是n 维非零列向量,记T n =-A I αα,证明:(1) 2=A A 的充分必要条件是1T =αα.第三章 行列式(P69-98)11) 第82页,定理3.3.1证明部分,倒数第2行改为证明 要证明()**det ==AA A A A I ,即证明()()()**11,,det ,,nnik jk ij ki kj k k entry i j a A A a entry i j δ======∑∑AA A A A且1,0,ij i ji j δ=⎧=⎨≠⎩第四章 线性空间与线性变换(P99-139)12) 第106页,第6行:记[]123=A εεε,[]123=B ηηη,因为这里A 可逆,故1-=M A B13) 第106页, 例4.2.5解答的最后一段公式的倒数第2行修改为:[]121011011112111101-⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦A B 3313232211331212101101111203211212101101111200124412101101111200124412025301013200124410001101013200124R R R R R R R R R R R --+--⨯-⨯-⎡⎤⎢⎥−−−→⎢⎥⎢⎥-⎣⎦-⎡⎤⎢⎥−−−→⎢⎥⎢⎥----⎣⎦-⎡⎤⎢⎥−−−→⎢⎥⎢⎥⎣⎦---⎡⎤⎢⎥−−−→---⎢⎥⎢⎥⎣⎦−−−−→---4⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦14) 第112页,定理4.2.7(维数公式)证明的第4行“...因为 122W W W ⋂⊆,所以它还可…” 15) 第114页,正数第2、3行()211span ,W =αα ()221span ,W =ββ16) 第132页,定理4.5.5的证明修改为:证明 设线性变换T 在某标准正交基下的表示矩阵是Q ,则T =Q Q I . 向量α和β在该标准正交基下的坐标向量是x 和y ,内积是T x y . 向量α和β经正交变换后在该标准正交基下的坐标向量是Qx 与Qy ,内积是()()TQx Qy .因为()()TT T T T ===Qx Qy x Q Qy x Iy x y ,故正交变换保持向量内积不变.17) 第133页,正数第10行“例4.5.5 5设 u 为n 元单位列向量,…” 18) 第134页,第8题倒数第1行,修改为:11001α⎡⎤=⎢⎥⎣⎦,… 第五章 特征值与二次型(P140-169) 19) 第166页,第6题修改为:6. 设n 阶可逆矩阵A 的特征值为n 个非零数1,,n λλ,试证A 的伴随矩阵的特征为为()()111det ,,det nλλA A .20) 第167页,第10题修改为:10.设2320-+=A A I ,证明A 的特征值只能是1或2. 21) 第167页,第13题修改为:13. 已知12λ=是3阶矩阵A 的一个特征值,[]1120T=α,[]2101T=α是A 属于特征值2的两个特征向量,[]212=--β,计算A β 22) 第169页,第36题修改为:36. 二次型()22212312313,,222T f x x x ax x x bx x ==+-+x Ax ,其中二次型f 的矩阵A 的特征值之和为1,特征值之积为-12,求23) 第169页,第37题修改为:37. 二次型 f (x 1,x 2,x 3)=x T Ax =x 12+x 22+x 32+2ax 1x 2+2x 1x 3+2bx 2x 3,24) 第169页,第38题修改为:38. 二次型 f (x 1,x 2,x 3)=x T Ax =4x 12+4x 22+4x 32+4x 1x 2+ax 1x 3−4x 2x 3,第六章 矩阵分解(P170-186)25) 第173页,倒数第2行:记 []12n ααα=A ,[]12n Q =q q q26) 第177页,倒数第1行:121122TT T n n n λλλ=++++p p p p p p27) 第182页,正数第8行为构造U ,首先计算1111232⎡⎤⎢⎥-⎢⎥⎢⎥⎣==⎦u28) 第183页,第2至5行公式修改为2210⎡⎤⎥=⎥⎥⎦u,3245-⎡⎤⎥⎥⎥⎦=u 从而得[]123=U u u u , 因此112222-⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦A130********3⎡⎢⎡⎤⎢⎢⎥⎢⎥=-⎢⎥⎢⎥⎥⎢⎥⎢⎥⎥⎣⎦⎢⎥⎦⎥⎣⎦⎢。

《编译原理》勘误表2004-1-31.第8页图1.4的语法树中inttoreal 和60之间少了一条竖线,即2.第17页的第12行r * = r + | ε 和r + = rr *改成:r * = r + | ε 和r + = rr *3.第216页的倒数第8行有向无环图(directed acyclic gra hp改成:有向无环图(directed acyclic gra ph4.第229页的第1行emit (t , ‘:=’, Elist 1.place , ‘(’, limit (Elist 1.array , m ) );改成:emit (t , ‘:=’, Elist 1.place , ‘*’, limit (Elist 1.array , m ) );5.第237页的第1行if id 1 > id 2 goto E .false改成:if id 1 ≥id 2 goto E .false6.第238页的倒数第11行的“next:”不应缩进L n -1: S n 的代码next:改成:L n -1: S n 的代码next:7.第239页的第10行的“next:”不应缩进test: if t = V 1 goto L 1if t = V 2 goto L 2. . .if t = V n -1 goto L n -1goto L nnext: inttoreal position + * 60initial rate inttoreal position + * 60 initial rate 改成改成:test: if t = V1 goto L1if t = V2 goto L2. . .if t = V n-1 goto L n-1goto L nnext:8.第239页的第21行的“next:”不应缩进test: case V1 L1case V2L2. . .case V n-1L n-1case t L nnext:改成:test: case V1 L1case V2L2. . .case V n-1L n-1case t L nnext:9.第9.10中顶点4到顶点3的回边少了箭头改成:2003-12-131.第318页图10.9的最下面的文字在内存中的已完全连接的可执行程序改成:完全连接的可执行代码已在内存中2003-12-61.第270页图9.1的第11行do j = j (1; while (a[j]> v);改成:do j = j 1; while (a[j]> v);2.第270页图9.2的第(8)条语句(8 ) if t3> v goto (5 )改成:(8 ) if t3< v goto (5 )3.第271页图9.3的第2个方框if t3> v goto B2改成:if t3< v goto B24.第273页图9.5的第2个方框if t3> v goto B2改成:if t3< v goto B25.第277页图9.9的第2个方框if t3> v goto B2改成:if t3< v goto B22003-12-11.第142页第5行E→E1 + T E. nptr := mknode ('+', E1. nptr, T. nptr ) 改成:E→E1 + T E. nptr := mknode ('+', E1. nptr, T. nptr )2. 第182页图6.1算法的倒数第2行qui C ksort(1,9)改成:qui c ksort(1,9)2003-10-121.目录第3页第8章代秒生成改成第8章代码生成2.第49页第2行对某个串α,存在推导A⇒*Aα改成对某个串α,存在推导A⇒+Aα3.第80页第1行如果S'⇒*rm αAw ⇒*rmαβ1β2w 改成:如果S'⇒*rm αAw ⇒rmαβ1β2w。

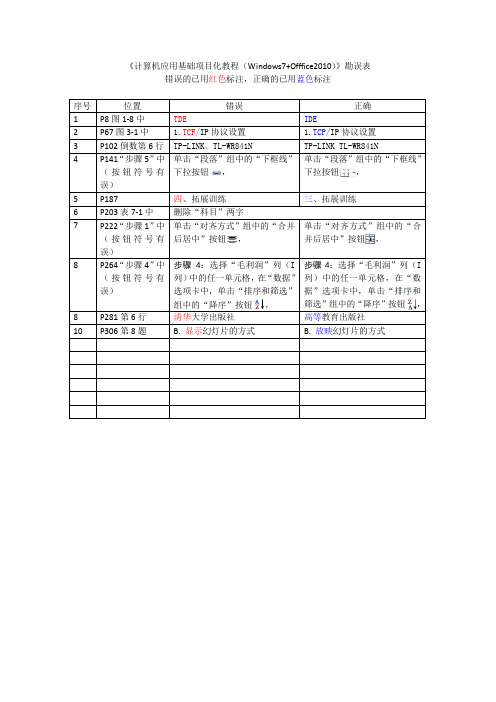
《计算机组成与设计》勘误表0)P7 图1-8中“系统员”改为“系统管理员”。
1)P56 图2-10(b)修改为:指令格式及操作码编码说明OP_Code A1A2A300000001…01114位操作码的三地址指令共8条OP_Code A1A2 10001001 (1111)8位操作码的二地址指令共64条00000001…0111OP_Code A10001001 (1111)12位操作码的一地址指令共512条00000001…011110001001…1111OP_Code10001001 (1111)16位操作码的零地址指令共8192条00000001…111110001001…111110001001…1111(b)等长8/64/512/8192扩展法2)P65第一段最后一句(因此,寻址范围由偏移量的位数决定。
)删去。
3)P81 习题2.14中第一行删去“单地址”三个字。
4)P87 第一段最后一句:“则存储容量=存储单元个数×存储字长/8,单位是字节(B)。
”,改为:“则存储容量等于所存放的字节数。
”5)P92 图3-5中“解码器”改为:“译码器”。
6)P97 图3-9(a)(b)图中“D1…D m”改为:“D0…D m-1”。
图3-9(a)“数据输出缓冲器”改为:“数据输出驱动器”。
7)P97 图3-10中“1677216”改为:“16M”。
7a)P102图3-14给出了一个MOS管型MROM的逻辑结构。
其存储容量为16×1位,4行保存的信息分别为1001、1010、0101和01018)P104 图3-17(b)中“D1”改为:“D0”。
9)P108最后一段中,“对于ROM芯片来说,它通常没有-WE引脚,”,改为:“对于ROM芯片来说,它通常没有-WE引脚(EEPROM除外),”。
10)P109最后一段中,“图3-24给出了16个256K×8位DRAM芯片构成1M×32位存储器的芯片扩展示意图。
202王道计算机组成原理勘误《计算机组成原理》是一门重要的课程,旨在向学习者介绍计算机的组成原理及其相关知识。
它包括有关计算机系统代数性质、操作系统、内存、输入输出系统、中央处理器、存储器和总线等计算机基础知识。
鉴于此,《计算机组成原理》勘误至关重要,以确保正确表述计算机组成原理中的概念、术语及其相关内容。
《计算机组成原理》勘误针对计算机组成原理中的一些文字、字母、数字和技术术语进行纠正和重新整理,以保证计算机组成原理的准确性和可读性。
例如,在第2章中关于中央处理器的解释中,“CPU”在课本中集中表示中央处理器,但是《计算机组成原理》勘误将其改写为“Central Processing Unit”以正确描述CPU的含义;在第5章中谈到计算机网络,原文中将“Real-Time Data”缩写为“RTD”,但是《计算机组成原理》勘误将其修改改为“Real Time Data”,使其更加准确明了。
此外,在《计算机组成原理》勘误过程中,涉及到添加新的内容来补充和详细解释概念、术语,以及修正错误的阐述来纠正不正确的表述,甚至修改文章的格式以使其更加易读,以此予以改进计算机组成原理课程的教学内容,使学习者对计算机组成原理来说一知半解的情况得到改善,提高学习者系统学习计算机组成原理的能力。
《计算机组成原理》勘误为计算机组成原理课程提供了上限性或规范性介绍,以帮助学习者发展分析思维和技能,例如有关计算机硬件/软件设计和组成的能力。
另外,《计算机组成原理》勘误也可以促使学习者掌握和理解有关计算机程序设计、计算机网络、操作系统等的概念和语言,以便更加完整地认识和掌握计算机组成原理中的基本概念和技术。
综上所述,《计算机组成原理》勘误是计算机组成原理教学内容改进的过程。
正确的勘误可以提高学习者对计算机组成原理的理解和掌握,加深学习者对计算机组成原理的认识,同时为下一步的学习打下基础。
微机原理及应用勘误表
1. P85,顺13行,OP S ←(OPD)∧(OPS)
纠正为:OP D ←(OPD)∧(OPS)
2. P89,顺17行,【例4-35】 利用ROL 或RCL 指令
纠正为:【例4-35】 利用SAL 和RCL 指令
3. P89,顺24行, RO L AX ,1
纠正为: SA L AX ,1
4. P89,图4-10中,RO L AX 纠正为
SA L AX
5. P97,表4-10“结果”一列中,原稿中有4处不等号没有输出到纸质上 正确表示如下表:
且倒数第9、10行中两处不等号也没有输出,纠正为:
执行CMP AL ,BL 后,ZF=0,SF=0,OF=0,AL >BL 。
执行CMP BL ,AL 后,ZF=0,SF=1,OF=0,BL <AL 。
6. P111,顺5行,CHAR DW ’AB ’
纠正为:CHAR DW ’ab ’
7. P191,倒数第1行,写入奇地址端口
纠正为: 写入偶地址端口
8. P194,图6-28中,主82C59A 和从82C59A 不能画成一个整体
9.
P34,倒数第3行,为三大部分,运算器、控制器和高速缓冲存储器
纠正为:为三大部分,运算器、控制器和寄存器
表。
\《微处理器系统结构与嵌入式系统设计(第二版)》勘误表160页图5-26 逻辑地址到物理地址的转换A A A A A A178页习题5.14图178页习题5.15图185页图6-7 固定式多端口地址译码电路195页图6-23 DMAC的结构框图213页图6-47 波特率发生器262页图8-17 LDMDB使用示例303页【例9.9】int main(void){const char *a="Hello World!";char b[20];asm{MOV R0, a //;把数组a的首地址赋值给R0MOV R1, b //;把数组b的首地址赋值给R1BL my_strcpy, {R0, R1}}303页【例9.10】#include <stdio.h>int add(int i, int j){int res; /*定义中间变量res*/__asm{ADD res, i, j //;实现res=i+j}return res;}void main( ){int a;a = add(2,3);printf("addition result is : %d\n",a);}332页示例程序TLOOP LDR R2, =UTRSTAT0 ; 读取UART0收发状态寄存器的值LDR R0, [R2]TST R0, #0x02 ; 判断发送缓冲区是否空闲…RLOOP LDR R2, =UTRSTAT0 ; 读取UART0收发状态寄存器的值LDR R0, [R2]TST R0, #0x01 ; 判断接收缓冲区是否有数据…B TLOOP。