AFS自适应前照灯系统
- 格式:doc
- 大小:66.50 KB
- 文档页数:5
AFS专论1·AFS自适应前照灯系统简介AFS(Adaptive Front Lighting System)自适应前照灯系统简介AFS是指能自动改变两种以上的光型以适应车辆行驶条件变化的前照灯系统。
[1]AFS是目前国际在车灯照明领域最新的技术之一,同时也是一个和行车安全息息相关的主动式安全系统。
AFS研发背景传统的前照灯系统是由:近光灯、远光灯、行驶灯和前雾灯组合而成。
在城市道路行驶并且限速的情况下,主要采用近光;在乡间道路或者高速公路上高速行驶的时候,主要采用远光;雾天行驶的时候,应该打开雾灯;白天行驶,应该打开行驶灯(欧洲标准)。
但是实际的使用中,传统的前照灯系统存在着诸多问题。
例如,现有近光灯在近距离上的照明效果很不好,特别是在交通状况比较复杂的市区,经常会有很多司机在晚上将近光灯、远光灯和前雾灯统统打开;车辆在转弯的时候也存在照明的暗区,严重影响了司机对弯道上障碍的判断;车辆在雨天行驶的时候,地面积水反射前灯的光线,产生反射眩光等等。
欧洲汽车照明研究机构曾经就此作过做专项调查,结果显示,欧洲司机们最希望改善的是阴雨天气积水路面的- 1 -页照明,排在第二位的是乡村公路的照明,接下来依次是弯道照明、高速公路照明和市区照明。
[1]上述这些问题的存在,就使得研制一种具有多种照明功能的前照灯成为必要,并且这些功能的切换,出于安全上的考虑,必须是自动实现的。
所以欧洲和日本相继研制了这种自动适应车辆行驶状态的前照灯系统——AFS(自适应前照灯系统)。
AFS功能简介阴雨天气的照明:如图1、图2所示,阴雨天气,地面的积水会将行驶车辆打在地面上的光线,反射至对面会车司机的眼睛中,使其目眩,进而可能造成交通事故。
AFS有效的解决方法是:前灯发出如图所示的特殊光型,减弱地面可能对会车产生眩光的区域的光强。
[1]图1 雨天积水反射的AFS光线(侧视)图2 雨天积水对AFS光线的反射(俯视)- 2 -页乡村道路的照明:在环境照明不好的乡村道路上高速行驶的车辆,需要的是照得远,照得宽的前照灯。
自适应前照灯系统——AFSAFS系统全名适路性前方照明系统(Adaptive Frontlighting System),他的功能的伸缩性很大,根据我们在车辆照明实际使用过程中所遇到的所有问题而采取的技术革新,就目前能够实现的功能(也就是目前最好的AFS的功能)可以根据车辆的行驶状况(例如高速巡航时、紧急刹车时、启动时等),路况(例如高速公路、城市公路、乡村公路等)以及天气(例如下雨、下雪等)来适时自动的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优光照表现。
而我们所采用的AFS的设计比较简单,仅根据车辆行驶方向的改变来控制固定照射角度的转向辅助照明灯。
其使用方法为:在大灯开启状态下,方向盘向左转,大于开启角度的时候,左侧转向辅助照明灯就会自动开启,当方向盘转回来,小于开启角度的时候,转向辅助照明灯会自动关闭;向右转弯同样道理。
我们的这个照明系统属于AFS,但是因为它仅根据转向有关,所以我们在跟客户介绍的时候最好用这样的名称介绍----------AFS转向辅助照明系统、AFS转向辅助照明灯。
注意:此照明灯的开启与关闭与转向灯不发生关系,它是根据方向盘转动角度实现的,而转向灯在行驶时还要正常使用,不要因此而违反交通规则。
交车时一定要向客户解释清楚!以上内容是为我店销售顾问做的总结,希望得到大家的指正,加以完善,非常感谢!下面是从网上下载的一篇关于AFS的介绍科技的进步带给人们越来越多的惊喜和愉悦,自适应前照灯系统便是一例。
它使得夜晚驾驶变得不再令人恐慌,甚至心旷神怡,没准会有更多的驾驶者爱上夜晚出行去享受黑夜的浪漫。
AFS的全称是自适应前照灯系统。
作为当今世界最先进的汽车照明系统,它能够有效地降低驾驶者在夜晚弯路上行车的疲劳程度,使驾驶者能够看清转弯处的实际路况,进而有充分的时间来应付紧急情况,从而明显提升夜晚弯路上行车的安全性。
虽然夜晚事故发生率只占所有交通事故的28%,但是其死亡事故的几率却高达白天死亡事故的两倍以上。
afs是什么意思
afs是随动转向大灯。
随动转向大灯即自动转向大灯,也可以叫做自动头灯。
随动转向大灯简称AFS,全称为汽车自适应前大灯系统或者智能前照灯系统。
自适应前大灯系统AFS(Adaptive Front-Lighting System),能够根据汽车方向盘角度、车辆偏转率和行驶速度,不断对大灯进行动态调节,适应当前的转向角,保持灯光方向与汽车的当前行驶方向一致,以确保对前方道路提供最佳照明,并对驾驶员提供最佳可见度,从而显着增强了黑暗中驾驶的安全性。
在路面照明差或多弯道的路况中,扩大驾驶员的视野,而且可提前提醒对方来车。
雅马哈摩托车AFS自适应前照灯系统简介(2)
吴世锋
【期刊名称】《摩托车技术》
【年(卷),期】2011(000)002
【摘要】@@ (上接2011年第1期)rne)如图15所示,配装了AFS系统的摩托车在十字路口上会车时,只要骑乘者将远光灯切换成近光灯照明,ECU便能立即发出近光灯扫描照明命令,驱动左前照灯光束向左旋转15°,驱动右前照灯光束向右旋转15°,大幅度提高骑乘者的视野宽度,让骑乘者不仅能看清对面的来车,还能看清楚左右十字路口的车辆和行人.
【总页数】4页(P64-67)
【作者】吴世锋
【作者单位】南昌航空大学
【正文语种】中文
【相关文献】
1.汽车自适应前照灯系统AFS的控制策略研究 [J], 杜小芳;赵永浩;徐文婷;薛亮
2.雅马哈摩托车AFS自适应前照灯系统简介(1) [J], 吴世锋
3.前照灯自适应系统(AFS)试验方法研究 [J], 王丹;武华堂;陈积先;覃北阶;来永芳;陈萍;孟辉
4.自适应前照灯控制系统(AFS)的分析与研究 [J], 庞成立
5.自适应前照灯系统(AFS)的应用及发展趋势 [J], 丁亚利;牛华;章志军
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车自适应前照灯系统(AFS)工作原理及步进电机驱动器
传统汽车前照灯的灯光跟车身方向始终一致,在汽车转弯时无法有效照明弯道内侧的盲区,如果弯道内侧恰好存在人或物体,而车速又未恰当降低,则会带来安全隐患,如图1所示。
相比较而言,汽车自适应前照灯系统(AFS)功能可以提供旋转(swiveling)调节效果,能够根据方向盘的角度转动,把有效的光束投射到驾驶者需要看清的前方路面上,帮助降低安全隐患。
图1:AFS功能的旋转调节(上图)及水平调节(下图)照明效果。
除了能够进行动态旋转调节,AFS功能还能提供动态水平高度调节。
此功能根据负载轴传感器的信号来调节前照灯的水平高度,可以适应不同的负载及不同的斜坡环境。
如图1右侧中,上图是AFS功能在正常水平条件下的灯光投身效果,中图是在汽车启动或上坡时路面颠簸条件下灯光上扬效果,下图是在刹车或下坡条件下的灯光水平下沉照明效果。
可见AFS可根据车身水平倾斜情况动态调节灯光高度,改善照明效果,增强安全性。
AFS工作原理结构图分别如图2和图3所示。
图2:AFS的工作原理结构图。
图3:AFS的工作原理结构图(续)。
步进电机驱动器的安放位置选择
汽车AFS的旋转及水平高度调节,是各使用一个步进电机来实现的,电机根据车辆四周的众多传感器反馈的数据作出反应,故设计人员需要采用适合的步进电机驱动方案,且安放在适合的位置。
控制AFS功能的步进电机驱动器的安放位置有两种选择。
一种方法称为直接。

汽车前大灯随动转向系统(AFS)摘要:本设计通过TMS470单片机和MSP430™单片机组成主从网络,通过LIN 总线通信来实现对汽车HID 前大灯中的步进电机进行控制,从而达到照明的随动转向功能。
主控制器由TMS470MF03107作为主芯片,与车身网络通过CAN 总线连接,从总线数据中获取必要的信息,如方向盘转交,车速,车身水平度等,并进行实时演算确定当前应处的照明状态,再通过LIN 总线将动作命令发送给由MSP430作为主控芯片的执行模块,执行模块通过DRV8823驱动两个步进电机,调整车灯照明方向。
关键词:TMS470, MSP430, DRV8823, AFS, CAN, LIN1) 方案背景及意义项目背景:随着汽车电子技术的发展,越来越多的不同方式的行车安全功能被引入现代汽车的配置中。
其中一种主动安全系统就是随动转向前照明系统。
由SINTEF Transport Safety and Informatics 研究机构的研究报告显示,全球55%的致命性交通事故发生在夜间,车辆和行人之间的致命碰撞事故中有40%发生在黎明时分,即视线不良的状态下。
因此,联合国标准化机构(ECE)在2002年4月进行了对汽车照明系统改善的专项研究,并在同年发布了汽车照明随动转向系统(Adaptive Front-lighting System)的相关联合国标准,即ECE-R123。
今天,欧盟国家已经全面对配备HID 照明的汽车要求配备AFS 功能。
我国的国家标准制定机构也从2009年开始计划制定与随动转向照明系统相关的国家标准。
随着HID 汽车照明的普及和LED 前大灯的兴起,为了更进一步降低交通事故的发生概率,相信我国的AFS 相关标准会在近期发布。
方案意义:本设计通过TMS470和MSP430单片机的搭配,来实现AFS 系统的基本功能。
为计划开发AFS 系统的潜在客户以及希望将现有AFS 方案移植到TI MCU 平台的客户提供方案级的参考和支持。
自适应前照灯的工作原理
自适应前照灯(Adaptive Front Lighting System,AFS)是一种先进的汽车前照灯系统,它根据车辆驾驶状况和环境条件自动调整光束的方向和亮度,以提供最佳的照明效果和安全性。
以下是自适应前照灯的基本工作原理:
1.车速和转向角度检测:自适应前照灯系统会通过车辆的传
感器监测车速和方向盘的角度,以了解车辆的当前行驶状态。
2.环境照明检测:该系统还使用环境光传感器来检测周围的
照明条件,例如路灯亮度、其他车辆的前灯状态等。
3.算法和控制模块:基于车速、转向角度和环境状况的检测
数据,自适应前照灯系统的算法会计算出最适合的光束方向、亮度和灯光模式。
4.光束方向调整:根据算法的计算结果,自适应前照灯系统
会通过电动或液压机构,将前照灯的光束在水平和垂直方向上进行调整,以适应车辆的转向和车速变化,确保最佳的照明范围。
5.光束亮度调整:根据环境照明检测结果,自适应前照灯系
统会自动调整前照灯的亮度,以避免过亮或过暗对其他道路用户造成干扰,并提供最佳的照明效果。
总的来说,自适应前照灯系统通过车速、转向角度和环境条件的实时监测与分析,自动调整前照灯的光束方向和亮度,以提
供最佳的照明效果和安全性。
这种技术可以使驾驶者在夜间或复杂道路条件下获得更好的可见性,并减少对其他车辆的干扰。
上个世纪80年代,人们在驾车时为了寻求更为稳定和安全的行驶,对前照灯系统提出了更高的要求,因此氙气大灯(HID 放电灯)应运而生。
HID放电灯的使用较之以往的卤素车灯,具有较高的亮度和较远的投射范围。
到了上个世纪末,LED作为新型光源被更广泛的应运在车灯上,LED凭借自身的体积小、寿命长、低热量等诸多优点逐渐受到更多人们的喜爱。
但是,不论是氙气灯还是LE D光源,只能工作在一种模式下。
然而,随着驾驶环境的复杂程度以及天气条件的影响,尤其在夜晚发生交通事故的概率越来越高。
所以,需要一种前照灯,能够满足随着驾驶环境的改变而改变其光线,这也就是智能前照灯系统(AFS)。
智能前照灯系统(Adaptive Front-lighting System,简称AFS)是一种智能的灯光调节系统。
通过感知驾驶员操作、车辆行驶状态、路面变化以及天气环境等信息,AFS自动控制前照灯实时进行上下左右照明角度的调整,为驾驶员提供最佳道路照明效果。
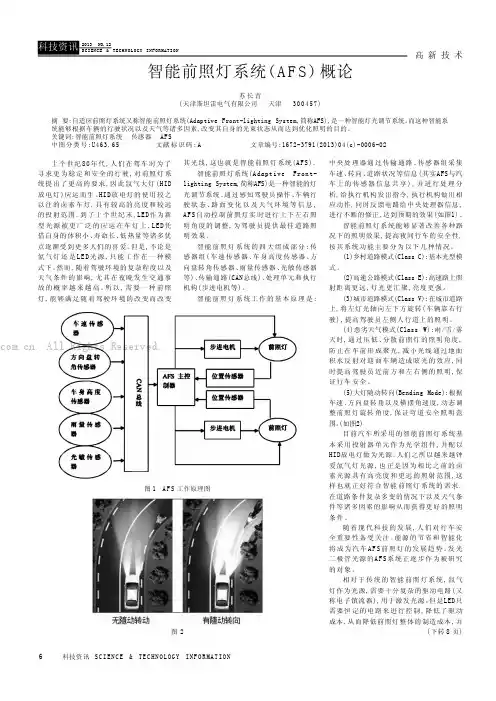
智能前照灯系统的四大组成部分:传感器组(车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、光敏传感器等)、传输通路(CAN总线)、处理单元和执行机构(步进电机等)。
智能前照灯系统工作的基本原理是:中央处理器通过传输通路、传感器组采集车速、转向、道路状况等信息(其实AFS与汽车上的传感器信息共享),并进行处理分析,给执行机构发出指令,执行机构做出相应动作,同时反馈电路给中央处理器信息,进行不断的修正,达到预期的效果(如图1)。
智能前照灯系统能够显著改善各种路况下的照明效果,提高夜间行车的安全性,按其系统功能主要分为以下几种情况。
(1)乡村道路模式(Class C):基本光型模式。
(2)高速公路模式(Class E):高速路上照射距离更远,灯光更汇聚,亮度更强。
(3)城市道路模式(Class V):在城市道路上,将左灯光轴向左下方旋转(车辆靠右行驶),提高驾驶员左侧人行道上的照明。
智能前照灯系统(AFS)概论作者:苏长青来源:《科技资讯》2013年第12期摘要:自适应前照灯系统又称智能前照灯系统(Adaptive Front-lighting System,简称AFS),是一种智能灯光调节系统。
而这种智能系统能够根据车辆的行驶状况以及天气等诸多因素,改变其自身的光束状态从而达到优化照明的目的。
关键词:智能前照灯系统传感器 AFS中图分类号:U463.65 文献标识码:A 文章编号:1672-3791(2013)04(c)-0006-02上个世纪80年代,人们在驾车时为了寻求更为稳定和安全的行驶,对前照灯系统提出了更高的要求,因此氙气大灯(HID放电灯)应运而生。
HID放电灯的使用较之以往的卤素车灯,具有较高的亮度和较远的投射范围。
到了上个世纪末,LED作为新型光源被更广泛的应运在车灯上,LED凭借自身的体积小、寿命长、低热量等诸多优点逐渐受到更多人们的喜爱。
但是,不论是氙气灯还是LED光源,只能工作在一种模式下。
然而,随着驾驶环境的复杂程度以及天气条件的影响,尤其在夜晚发生交通事故的概率越来越高。
所以,需要一种前照灯,能够满足随着驾驶环境的改变而改变其光线,这也就是智能前照灯系统(AFS)。
智能前照灯系统(Adaptive Front-lighting System,简称AFS)是一种智能的灯光调节系统。
通过感知驾驶员操作、车辆行驶状态、路面变化以及天气环境等信息,AFS自动控制前照灯实时进行上下左右照明角度的调整,为驾驶员提供最佳道路照明效果。
智能前照灯系统的四大组成部分:传感器组(车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、光敏传感器等)、传输通路(CAN总线)、处理单元和执行机构(步进电机等)。
智能前照灯系统工作的基本原理是:中央处理器通过传输通路、传感器组采集车速、转向、道路状况等信息(其实AFS与汽车上的传感器信息共享),并进行处理分析,给执行机构发出指令,执行机构做出相应动作,同时反馈电路给中央处理器信息,进行不断的修正,达到预期的效果(如图1)。
AFS专论1·AFS自适应前照灯系统简介AFS(Adaptive Front Lighting System)自适应前照灯系统简介AFS是指能自动改变两种以上的光型以适应车辆行驶条件变化的前照灯系统。
[1]AFS是目前国际在车灯照明领域最新的技术之一,同时也是一个和行车安全息息相关的主动式安全系统。
AFS研发背景传统的前照灯系统是由:近光灯、远光灯、行驶灯和前雾灯组合而成。
在城市道路行驶并且限速的情况下,主要采用近光;在乡间道路或者高速公路上高速行驶的时候,主要采用远光;雾天行驶的时候,应该打开雾灯;白天行驶,应该打开行驶灯(欧洲标准)。
但是实际的使用中,传统的前照灯系统存在着诸多问题。
例如,现有近光灯在近距离上的照明效果很不好,特别是在交通状况比较复杂的市区,经常会有很多司机在晚上将近光灯、远光灯和前雾灯统统打开;车辆在转弯的时候也存在照明的暗区,严重影响了司机对弯道上障碍的判断;车辆在雨天行驶的时候,地面积水反射前灯的光线,产生反射眩光等等。
欧洲汽车照明研究机构曾经就此作过做专项调查,结果显示,欧洲司机们最希望改善的是阴雨天气积水路面的照明,排在第二位的是乡村公路的照明,接下来依次是弯道照明、高速公路照明和市区照明。
[1]上述这些问题的存在,就使得研制一种具有多种照明功能的前照灯成为必要,并且这些功能的切换,出于安全上的考虑,必须是自动实现的。
所以欧洲和日本相继研制了这种自动适应车辆行驶状态的前照灯系统——AFS(自适应前照灯系统)。
AFS功能简介阴雨天气的照明:如图1、图2所示,阴雨天气,地面的积水会将行驶车辆打在地面上的光线,反射至对面会车司机的眼睛中,使其目眩,进而可能造成交通事故。
AFS有效的解决方法是:前灯发出如图所示的特殊光型,减弱地面可能对会车产生眩光的区域的光强。
[1]图1 雨天积水反射的AFS光线(侧视)图2 雨天积水对AFS光线的反射(俯视)乡村道路的照明:在环境照明不好的乡村道路上高速行驶的车辆,需要的是照得远,照得宽的前照灯。
AFS自适应前照灯系统(Adaptive Front-Loght System)一、功能根据车辆的行驶状况、路状以及天气来适时的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优照明表现。
二、工作原理及系统图AFS系统分为两大部分:1、前照灯光束高度自动控制系统2、智能AFS自适应前照灯系统1、前照灯光束高度自动控制系统前照灯点亮时,前照灯光束高度自动控制系统根据车辆的行驶状况,操作前照灯光束高度调节电动机。
AFS ECU根据高度控制传感器和各ECU的信号计算车辆状态的变化,然后ECU根据该信息控制前照灯光束高度调节电动机,以改变前照灯反射器角度。
2.智能AFS(自适应前照灯系统)智能AFS通过移动近光,在转向过程中保持大范围的近光照明及良好的视野。
智能AFS 采用中高速控制和低速控制。
在中高速控制过程中,系统根据转向角和转速计算目标光照角,并分别改变各近光前照灯的放置角。
在低速控制过程中,系统根据转向角计算目标光照角,并改变入弯侧近光前照灯的旋转角。
低速控制满足下死所有条件,AFS ECU执行低速控制·发动机正在运转·车辆正以10Km/H或更高的速度向前行驶·转向角为6º或更大·近光灯点亮·AFS OFF开关关闭旋转范围中速控制·发动机正运转·车辆正以30Km/h或更高时速前进·转向角为7.5º或更大·近光灯点亮初始化设定控制发动机起动时,AFS ECU驱动前照灯旋转执行器,将前照灯投射光束向车辆中间方向移至操作极限位置,然后使其返回到正常位置。
从而,AFS ECU估算进行基准控制的前照灯位置。
解读NCV70522汽车自适应前照灯系统电路由于机械结构的限制,自适应前照灯系统(AFS)应用中,步进电机有时可能会堵转。
一旦电机堵转,电子控制单元(ECU)将失去前照灯位置的跟踪信息并作出不恰当的反应,滋生极严重的安全问题,所以AFS 应用中堵转检测是必不可少的。
通常可以通过电机的反电动势(BEMF)来判断电机堵转与否。
BEMF 因电机速度、负载及供电电压的不同而变化。
传统的步进电机驱动芯片无BEMF 输出,但包含内置堵转检测算法。
客户仅可以在寄存器里设定固定的堵转认定临界值,这表示在真实道路条件下所有设定值都必须在工作之前离线预设,而不能适配真实工作条件。
NCV70522 微步步进电机驱动器透过SLA 引脚提供BEMF 输出,这表示它能实时进行停转检测计算,并根据不同条件来调节检测等级。
算法应用NCV70522 是一款微步步进电机驱动器,用于双极型步进电机。
这芯片通过I/O 引脚及SPI 接口连接至外部微控制器。
NCV70522 输出电流有多种选择。
它根据NXT 输入引脚上的脉冲信号以及方向寄存器[DIRCTRL]或DIR 输入引脚的状态来转动下一个微步。
这器件提供从满步到32 微步的细分、由SPI 寄存器SM[2:0]来选择的7 种步进模式。
NCV70522 包含SLA 的输出,可以用于堵转检测算法及根据电机的BEMF 来调节转矩和速度计算。
典型应用电路图如图所示。
当系统上电时候,微控制器就会初始化,NCV70522 复位。
这些动作完成时,线圈电流及步进模式将被设定。
然后电机驱动器将启用。
NXT 脉冲将被发送实现转动电机。
电机转速等于NXT 脉冲频率乘以步进细分模式的值。
自适应前照明系统工作原理一、前言自适应前照明系统(Adaptive Front Lighting System,简称AFS)是一种新型的汽车照明系统,具有智能化、高效节能、安全可靠等特点。
本文将详细介绍AFS的工作原理。
二、什么是自适应前照明系统?自适应前照明系统是一种基于车速、方向盘转角和路况等信息,通过控制车灯光束的方向和亮度,以达到提高驾驶安全性和舒适性的汽车照明系统。
三、AFS的硬件结构AFS主要由以下硬件组成:1.光源:使用氙气灯或LED灯作为光源。
2.反射镜:反射镜用于反射光线,使其聚焦在一个点上。
3.电机:电机用于控制灯光束的方向。
4.传感器:传感器用于检测车速、方向盘转角和路况等信息。
5.控制单元:控制单元根据传感器提供的信息,控制电机调整灯光束的方向和亮度。
四、AFS的工作原理1.根据车速调整灯光亮度当车辆行驶在高速公路等道路上时,AFS会根据车速自动调整灯光亮度。
当车速较快时,灯光亮度会相应增加,以提高照明效果。
2.根据方向盘转角调整灯光方向当车辆行驶在弯道等道路上时,AFS会根据方向盘转角自动调整灯光方向。
当方向盘转角较大时,灯光束会自动偏向弯道的一侧,以提高照明效果。
3.根据路况调整灯光方向当车辆行驶在坑洼路面等道路上时,AFS会根据路况自动调整灯光方向。
当路面不平时,灯光束会自动偏离坑洼的一侧,以避免眩目和不必要的反射。
4.切换远近光灯当车辆行驶在城市等需要频繁切换远近光灯的道路上时,AFS可以根据前方车辆或交通信号灯等信息自动切换远近光灯。
五、总结AFS是一种智能化的汽车照明系统,在提高驾驶安全性和舒适性方面具有重要作用。
其工作原理主要是根据车速、方向盘转角和路况等信息,通过控制车灯光束的方向和亮度,以达到提高照明效果的目的。
AFS自适应前照灯系统
(Adaptive Front-Loght System)
一、功能
根据车辆的行驶状况、路状以及天气来适时的调节前
照灯的照射角度、形状、光亮度以及照射时间,从而达到
相应状况下的最优照明表现。
二、工作原理及系统图
AFS系统分为两大部分:1、前照灯光束高度自动控制系
统2、智能AFS自适应前照灯系统
1、前照灯光束高度自动控制系统
前照灯点亮时,前照灯光束高度自动控制系统根据车辆的行驶状况,操作前照灯光束高度调节电动机。
AFS ECU根据高度控制传感器和各ECU的信号计算车辆状态的变化,然后ECU根据该信息控制前照灯光束高度调节电动机,以改变前照灯反射器角度。
2.智能AFS(自适应前照灯系统)
智能AFS通过移动近光,在转向过程中保持大范围的近光照明及良好的视野。
智能AFS 采用中高速控制和低速控制。
在中高速控制过程中,系统根据转向角和转速计算目标光照角,并分别改变各近光前照灯的放置角。
在低速控制过程中,系统根据转向角计算目标光照角,并改变入弯侧近光前照灯的旋转角。
低速控制
满足下死所有条件,AFS ECU执行低速控制
·发动机正在运转
·车辆正以10Km/H或更高的速度向前行驶
·转向角为6º或更大
·近光灯点亮
·AFS OFF开关关闭
旋转范围
中速控制
·发动机正运转
·车辆正以30Km/h或更高时速前进
·转向角为º或更大
·近光灯点亮
·AFS OFF开关关闭
初始化设定控制
发动机起动时,AFS ECU驱动前照灯旋转执行器,将前照灯投射光束向车辆中间方向移至操作极限位置,然后使其返回到正常位置。
从而,AFS ECU估算进行基准控制的前照灯位置。