车用自适应前照灯系统设计与研究_钱向明
- 格式:pdf
- 大小:418.06 KB
- 文档页数:4
汽车前照灯自适应控制系统设计作者:王文建王鑫惠金粤飞黄志涛来源:《科学与财富》2016年第26期摘要:本文设计了汽车前照灯自适应控制系统,该系统根据车辆行驶状态、速度变化以及天气环境等因素,自动控制前照灯进行实时动态的光照调节,实现前照灯自适应照明,从而提供最佳道路照明效果,保障行车安全。
汽车前照灯自适应照明系统是利用传感器,根据道路的状况、时段以及天气变化等因素,对车辆行驶中的任何变化,自动做出反应,进行自动调节,并采取有效措施,确保行车安全,控制系统从车内的电子系统和传感器获得信息,由传感器来辨识各种照明状况。
根据传感器传过来的信息可以对各种驾驶情况进行反馈从而实现多种照明分布。
关键词:汽车前照灯;自适应控制系统;自适应照明;亮度感应调节引言随着汽车电子技术的发展,人们对汽车的安全、舒适和人性化要求越来越高,而传统的前照灯系统存在照明光光型单一、近距离照明效果不好、弯道照明有暗区、照明有炫光等问题,严重影响了行车的安全。
随着汽车的安全技术越来越受到人们的重视,而由于汽车的普通前照灯具有固定的照射范围,当驾驶者在夜间弯道行驶时,普通前照灯无法改变、调节照明角度的方向,常常会在弯道内侧出现盲区,驾驶者的视线被限制在大灯光束照射的直线范围内,这对于夜间弯道行驶非常危险,极大地影响了夜间行车的安全性。
汽车前照灯的亮度和照射方向对于行车安全是至关重要的,前照灯的发光强度不足或者照射方向不合适,汽车前方的情况就不能清晰看见,存在安全隐患。
在此基础上,设计安全的照明系统是有必要的,相对于传统的前照灯系统更能适应道路的实际情况,运行成本低,并能够显著提高驾驶者夜间行车的安全性和舒适性,能够大大减少夜间眩目导致的交通事故,极大满足了人们对行车安全驾驶和舒适性的要求,随着汽车工业的发展,其功能将会越来越完善,影响也将会越来越深远,具有重要的现实意义。
1 系统原理汽车前照灯亮度感应调节及远近光灯自动切换系统可在车灯开启的情况下根据外界光线影响自动切换远近光,在车辆行驶过程中,驾驶者不再需要人为干预车辆灯光,自动切换远近光也不会对会车车辆驾驶员的视野造成影响,并且在远近光确定的情况下根据外界光线影响自动调节灯光亮度。
汽车自适应前照灯系统的设计分析汽车自适应前照灯系统的设计分析随着人们生活水平的提高,汽车成为了一个人们生活中不可或缺的交通工具。
在夜晚或恶劣天气下行驶时,光照不足会导致驾驶风险增加。
因此,汽车自适应前照灯系统被广泛应用于现代汽车。
汽车自适应前照灯系统是一种能够自动调节光照强度和光照范围的前照灯系统。
具体而言,当车辆在夜间行驶时,自适应前照灯系统能够依据环境亮度和路况判断前方障碍物或车辆,自动调节灯光亮度和灯光分布等参数,从而提供更好的视野和驾驶体验。
在雾天、雨天、雪天等天气恶劣时,自适应前照灯系统能够根据不同天气条件提供不同的光照程度和范围。
首先,自适应前照灯系统的设计需要考虑光源。
一般来说,汽车前照灯采用的光源包括LED、氙气和卤素灯等。
这些光源具有不同的特点和优缺点,因此设计者需要根据实际需求进行选择。
LED光源具有寿命长、易于调节和省电等优点,但其亮度不如氙气和卤素灯,同时成本也相对较高;氙气灯具有高亮度、远射程、启动快等优点,但寿命和可调节性较差,成本也相对高;卤素灯则亮度较高,启动快,但相对容易损坏和寿命短。
其次,自适应前照灯系统的设计需要考虑传感器。
传感器是判断环境亮度和路况等参数的重要组成部分。
在自适应前照灯系统中,常用的传感器包括摄像头、雷达、LIDAR等。
摄像头通过图像处理技术可以判断前方障碍物或路面情况,同时可以进行光学调节;雷达则可以判断前方距离和速度等参数,从而预测危险情况;LIDAR则利用激光技术测距、测速、测量空间位置等参数。
最后,自适应前照灯系统的设计需要考虑控制器和算法。
控制器和算法是将传感器获取的信息转换为控制信号的核心部分。
其中,算法是通过对传感器信息的处理和分析,根据停止距离、视线范围、车速等因素确定灯光强度、范围和方向等参数。
这些参数需要实时更新和调整,以应对各种路况情况。
综上所述,自适应前照灯系统的设计是一个复杂、综合性的过程,需要考虑光源、传感器、控制器和算法等多个因素。
自适应前照明系统的探讨摘要随着科学技术的发展,汽车行驶去安全已经成为当今世界研究的一大主题,而夜间行车照明不佳是导致交通高事故率的重要原因。
为了改善汽车照明状况智能化的照明系统投入了使用,以减轻驾驶员的负担,并进一步提高汽车行驶的安全性。
自适应前照明系统(Adaptive Front-Lighting,简称AFS),是最近推出的一项主动安全技术,出现在了很多新上市的车型上。
它的功能伸缩性很大,根据在车辆照明实际使用过程中所遇到的所有问题而采取的技术革新,就目前能够实现的功能可以根据车辆的行驶状况、路况,以及天气等来适时自动的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优光照表现。
本文介绍了目前自适应前照明系统的技术和原理,通过分析自适应照明系统在各种工作环境下的功能和模式,对自适应照明系统的发展趋势进行了论述,指明了自适应照明系统前景广阔。
关键字:照明,自适应,安全,LED目录第一章绪论 (3)1.引言 (3)2.自适应前照明系统原理 (3)3.自适应前照明系统技术现状 (4)第二章自适应前照明系统的功能与原理 (5)1.默认照明模式 (5)2.乡村道路模式 (5)3.城市照明模式 (6)4.高速公路照明模式 (7)5.弯道照明模式 (8)6.恶劣天气照明模式 (9)第三章自适应前照明系统的发展趋势 (11)1.预见型AFS (11)2.传感器 (11)3.ECU的算法 (11)4.AFS光源 (12)结束语 (13)参考文献 (14)致谢 (15)桂林航天工业学院毕业设计(论文)第一章绪论1.引言随着社会的发展和技术的进步,汽车行驶的周边环境越来越复杂多样。
道路的限速不同、路面的照明不同、行人的密度不同、天气条件的环境不同,传统上只具有近光和远光两种照明模式的普通前照灯,已经无法满足人民日益增长的行驶安全需要。
因为汽车上安装的普通前照灯具有固定的照射范围,当夜间汽车在转弯时,由于普通前照灯无法改变调节照明角度的方向,常常会在弯道内侧出现“盲区”,司机的视线被禁锢在大灯光束照射的直线范围内,这对汽车夜间在弯道行驶时非常危险,极大地影响了夜间行车的安全性[1]。
汽车自适应前照灯系统的设计摘要传统的汽车照明系统主要由前照灯系统,信号照明系统,车内照明系统三大部分组成。
随着科技的进步,传统照明系统也经历了长足的发展,但是实际的使用中,传统的前照灯系统依然存在着诸多问题,在面对复杂的道路条件和行车状况时,交通安全仍然存在巨大的隐患。
因此,如何使传统汽车照明智能化,驾车更安全,更舒适就成为一个十分紧迫而又有重大现实意义的课题。
针对传统的汽车照明灯夜间行驶在弯道时无法调节照明角度、在弯道内侧易出现盲区,在坡道无法调节照明角度等情况,提出了一种前照灯弯道自适应照明控制系统,以提高夜间行车安全性。
本文主要介绍了一种以单片机STC90C51为核心设计的汽车自适应前照灯计算机控制系统。
简要的介绍汽车自适应前照灯的产生的背景、当今国内外发展现状及趋势。
分析了该系统的组成、功能和工作原理。
在文章硬件部分,详细设计了汽车自适应前照灯左右转向计算机控制系统的主控制器及外围电路。
在软件部分,设计了系统软件的整体流程,算法程序,实现了一个可根据道路以及方向盘转角信号随动转向的控制系统。
通过最后的系统调试,保证了车辆在弯道行驶时,前照灯能根据路况调整到合适的位置给驾驶者提供照明。
表明了本设计方案的可行性和正确性。
在论文的最后,对本次毕业设计进行了总结,提出了一些尚待解决的问题,为今后的进一步完善提出了参考意见。
关键词:自适应照明,随动转向,安全驾驶,STC90C51A PROJECT OF AUTOMOTIVE ADAPTIVE FRONTLIGHTING SYSTEMABSTRACTTraditional automotive lighting system consists of three major components: headlamp system, signal lighting and interior lighting system. As technology advances, the traditional lighting system also continues to develop, but in practice, there are still many problems in the traditional headlamp system. Facing complex road conditions and driving conditions, there are colossal security bungles in the traffic safety. Therefore, how to make the traditional automotive lighting intelligent, and how to make the driving more secure and more comfortable have become a very urgent and great practically significant issue.The traditional automotive lighting drive at night may be faced some conditions, for example, inability of adjusting illumination angels at the curve, the appearance of blind section at the clip, inability of adjusting illuminati on angels at the ramp, based on which, a headlamp adaptive lighting control system at the curve is put forward in order to improve the driving safety at night. This paper introduces a Computer control system of the automotive adaptive headlamps with STC90C51 microcontroller core design. The paper will briefly introduce the background of the appearance of auto-adaptive headlamps, and its current development situations and trends at home and abroad. It will also analyze the composition, function and working theory of the system. The hardware part in the paper detailed designs the host controller and peripheral circuits of the auto adaptive headlamps left and right tuning computer control system. The software part projects the overall process of system software, algorithms program, finishing a control system that canoptional turn according to vehicle speed and steering angle signals. The final system debugging ensures that when the vehicles are driving at the curve, the headlamps can adjust itsel according to road conditions to a suitable position to light for the drivers. The project is of feasibility and correctness.At the end of the paper, a conclusion of the project is drawn to put forward some problems waiting for solving and to come up with some idea about the later improvement.Key words: adaptive lighting, tracking turning, safe driving,STC90C5目录第1章绪论 (1)§1.1 课题背景 (1)§1.2 国内外发展现状及发展趋势 (3)§1.3本课题的研究意义与主要内容 (5)第2章系统整体方案设计 (6)§2.1 系统的功能及构成 (6)§2.2 系统基本功能 (8)§2.3 系统的工作原理 (8)§2.3.1 随动转弯角度 (9)§2.3.2 车身纵倾调光 (10)§2.4本章小结 (10)第3章系统硬件设计 (11)§3.1 AFS主控制器设计 (11)§3.1.1 微控制芯片的选型 (11)§3.1.2 信号处理电路设计 (13)§3.1.3 电源电路设计 (15)§3.1.4 电机控制电路设计 (15)§3.2 执行器选择 (17)§3.3 传感器模块选择 (17)§3.4本章小结 (19)第4章系统软件设计 (20)§4.1程序思路 (20)§4.2系统分块程序设计 (21)§4.2.1 随动转弯程序 (22)§4.2.2 倾角转动程序 (23)§4.3 本章小结 (24)第5章系统调试 (25)§5.1 系统硬件调试 (25)§5.1.1 常见的硬件故障 (25)§5.1.2 硬件调试方法 (25)§5.2 系统软件调试 (26)§5.3 基于PROE的运动建模 (27)§5.4 本章小结 (28)结论 (29)参考文献 (30)致谢 (31)附录 (32)附录1原理图 (32)附录2 PCB (33)附录3 实物图 (34)附录4程序代码 (35)第1章绪论§1.1 课题背景自19世纪汽车诞生以来,已经历了一个多世纪的风雨。
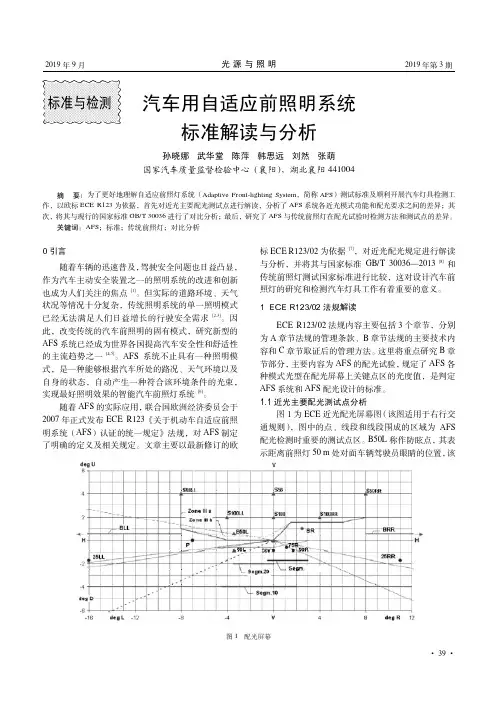
汽车用自适应前照明系统标准解读与分析孙晓娜武华堂陈萍韩思远刘然张萌国家汽车质量监督检验中心(襄阳),湖北襄阳441004摘要:为了更好地理解自适应前照灯系统(Adaptive Front-lighting System,简称AFS)测试标准及顺利开展汽车灯具检测工作,以欧标ECE R123为依据,首先对近光主要配光测试点进行解读,分析了AFS系统各近光模式功能和配光要求之间的差异;其次,将其与现行的国家标准GB/T30036进行了对比分析;最后,研究了AFS与传统前照灯在配光试验时检测方法和测试点的差异。
关键词:AFS;标准;传统前照灯;对比分析引言随着车辆的迅速普及,驾驶安全问题也日益凸显,作为汽车主动安全装置之一的照明系统的改进和创新也成为人们关注的焦点[1]。
但实际的道路环境、天气状况等情况十分复杂,传统照明系统的单一照明模式已经无法满足人们日益增长的行驶安全需求[2-3]。
因此,改变传统的汽车前照明的固有模式,研究新型的AFS系统已经成为世界各国提高汽车安全性和舒适性的主流趋势之一[4-5]。
AFS系统不止具有一种照明模式,是一种能够根据汽车所处的路况、天气环境以及自身的状态,自动产生一种符合该环境条件的光束,实现最好照明效果的智能汽车前照灯系统[6]。
随着AFS的实际应用,联合国欧洲经济委员会于2007年正式发布ECE R123《关于机动车自适应前照明系统(AFS)认证的统一规定》法规,对AFS制定了明确的定义及相关规定。
文章主要以最新修订的欧标ECE R123/02为依据[7],对近光配光规定进行解读与分析,并将其与国家标准GB/T30036—2013[8]和传统前照灯测试国家标准进行比较,这对设计汽车前照灯的研究和检测汽车灯具工作有着重要的意义。
法规解读ECE R123/02法规内容主要包括3个章节,分别为A章节法规的管理条款、B章节法规的主要技术内容和C章节取证后的管理方法。
这里将重点研究B章节部分,主要内容为AFS的配光试验,规定了AFS各种模式光型在配光屏幕上关键点区的光度值,是判定AFS系统和AFS配光设计的标准。
车辆前照灯的自适应照明技术研究随着科技的不断进步和创新,汽车行业也在不断演变,车辆前照灯的自适应照明技术正成为当今汽车安全性的重要组成部分。
本文将探讨车辆前照灯的自适应照明技术及其研究进展,并分析其对行车安全性的影响。
车辆前照灯的自适应照明技术是指能够根据车辆驾驶环境的不同,自动调整照明角度和照明强度,以提供最佳的照明效果和可见性。
该技术利用传感器、摄像头和智能控制系统等装置,对前方道路状况进行实时监测和分析,从而调整车灯的照明方式。
自适应照明技术的研究方向主要包括以下几个方面:1. 光束控制:自适应照明系统通过可变镜片或光束调制器实现光束的聚焦和分散。
根据车辆行驶速度、转向角度和道路状况等参数,系统能够自动调整光束的尺寸和方向,以提供更广泛和均匀的照明效果,增强驾驶员的视野。
2. 道路情况检测:自适应照明系统利用传感器和摄像头等设备检测前方道路状况,如车辆、行人、障碍物和曲线等因素,通过智能化的算法进行数据处理,从而使车灯能够自动调整照明模式。
例如,在没有交通的时候,车灯可以自动切换到远光灯模式,提供更远距离的照明效果;而在有车辆或行人出现时,则切换到近光灯模式,以避免对其他道路使用者造成眩光。
3. 驾驶员辅助功能:自适应照明系统可结合其他驾驶员辅助功能,如车道保持系统、自适应巡航控制系统等,实现更高级的驾驶辅助。
例如,根据车辆与前方车辆的距离和速度差异,系统可自动调整灯光的照射范围和照明强度,以提供更好的安全性和舒适性。
车辆前照灯的自适应照明技术的研究对行车安全性有着积极的影响。
首先,它可以提供更佳的照明效果,增强驾驶员对前方道路状况的感知能力,从而减少夜间驾驶中的事故风险。
其次,自适应照明系统可以根据车辆的行驶状况和道路情况进行自动调整,避免了驾驶员频繁地手动切换灯光模式,减轻了驾驶员的疲劳感。
最后,自适应照明技术与其他驾驶员辅助功能的结合使用,为驾驶员提供了更全面的行车辅助,提高了驾驶的便利性和安全性。
汽车自适应前照灯系统的设计摘要传统的汽车照明系统主要由前照灯系统,信号照明系统,车内照明系统三大部分组成。
随着科技的进步,传统照明系统也经历了长足的发展,但是实际的使用中,传统的前照灯系统依然存在着诸多问题,在面对复杂的道路条件和行车状况时,交通安全仍然存在巨大的隐患。
因此,如何使传统汽车照明智能化,驾车更安全,更舒适就成为一个十分紧迫而又有重大现实意义的课题。
针对传统的汽车照明灯夜间行驶在弯道时无法调节照明角度、在弯道内侧易出现盲区,在坡道无法调节照明角度等情况,提出了一种前照灯弯道自适应照明控制系统,以提高夜间行车安全性。
本文主要介绍了一种以单片机STC90C51为核心设计的汽车自适应前照灯计算机控制系统。
简要的介绍汽车自适应前照灯的产生的背景、当今国内外发展现状及趋势。
分析了该系统的组成、功能和工作原理。
在文章硬件部分,详细设计了汽车自适应前照灯左右转向计算机控制系统的主控制器及外围电路。
在软件部分,设计了系统软件的整体流程,算法程序,实现了一个可根据道路以及方向盘转角信号随动转向的控制系统。
通过最后的系统调试,保证了车辆在弯道行驶时,前照灯能根据路况调整到合适的位置给驾驶者提供照明。
表明了本设计方案的可行性和正确性。
在论文的最后,对本次毕业设计进行了总结,提出了一些尚待解决的问题,为今后的进一步完善提出了参考意见。
关键词:自适应照明,随动转向,安全驾驶,STC90C51A PROJECT OF AUTOMOTIVE ADAPTIVE FRONTLIGHTING SYSTEMABSTRACTTraditional automotive lighting system consists of three major components: headlamp system, signal lighting and interior lighting system. As technology advances, the traditional lighting system also continues to develop, but in practice, there are still many problems in the traditional headlamp system. Facing complex road conditions and driving conditions, there are colossal security bungles in the traffic safety. Therefore, how to make the traditional automotive lighting intelligent, and how to make the driving more secure and more comfortable have become a very urgent and great practically significant issue.The traditional automotive lighting drive at night may be faced some conditions, for example, inability of adjusting illumination angels at the curve, the appearance of blind section at the clip, inability of adjusting illuminati on angels at the ramp, based on which, a headlamp adaptive lighting control system at the curve is put forward in order to improve the driving safety at night. This paper introduces a Computer control system of the automotive adaptive headlamps with STC90C51 microcontroller core design. The paper will briefly introduce the background of the appearance of auto-adaptive headlamps, and its current development situations and trends at home and abroad. It will also analyze the composition, function and working theory of the system. The hardware part in the paper detailed designs the host controller and peripheral circuits of the auto adaptive headlamps left and right tuning computer control system. The software part projects the overall process of system software, algorithms program, finishing a control system that canoptional turn according to vehicle speed and steering angle signals. The final system debugging ensures that when the vehicles are driving at the curve, the headlamps can adjust itsel according to road conditions to a suitable position to light for the drivers. The project is of feasibility and correctness.At the end of the paper, a conclusion of the project is drawn to put forward some problems waiting for solving and to come up with some idea about the later improvement.Key words: adaptive lighting, tracking turning, safe driving,STC90C5目录第1章绪论 (1)§1.1 课题背景 (1)§1.2 国内外发展现状及发展趋势 (3)§1.3本课题的研究意义与主要内容 (5)第2章系统整体方案设计 (6)§2.1 系统的功能及构成 (6)§2.2 系统基本功能 (8)§2.3 系统的工作原理 (8)§2.3.1 随动转弯角度 (9)§2.3.2 车身纵倾调光 (10)§2.4本章小结 (10)第3章系统硬件设计 (11)§3.1 AFS主控制器设计 (11)§3.1.1 微控制芯片的选型 (11)§3.1.2 信号处理电路设计 (13)§3.1.3 电源电路设计 (15)§3.1.4 电机控制电路设计 (15)§3.2 执行器选择 (17)§3.3 传感器模块选择 (17)§3.4本章小结 (19)第4章系统软件设计 (20)§4.1程序思路 (20)§4.2系统分块程序设计 (21)§4.2.1 随动转弯程序 (22)§4.2.2 倾角转动程序 (23)§4.3 本章小结 (24)第5章系统调试 (25)§5.1 系统硬件调试 (25)§5.1.1 常见的硬件故障 (25)§5.1.2 硬件调试方法 (25)§5.2 系统软件调试 (26)§5.3 基于PROE的运动建模 (27)§5.4 本章小结 (28)结论 (29)参考文献 (30)致谢 (31)附录 (32)附录1原理图 (32)附录2 PCB (33)附录3 实物图 (34)附录4程序代码 (35)第1章绪论§1.1 课题背景自19世纪汽车诞生以来,已经历了一个多世纪的风雨。
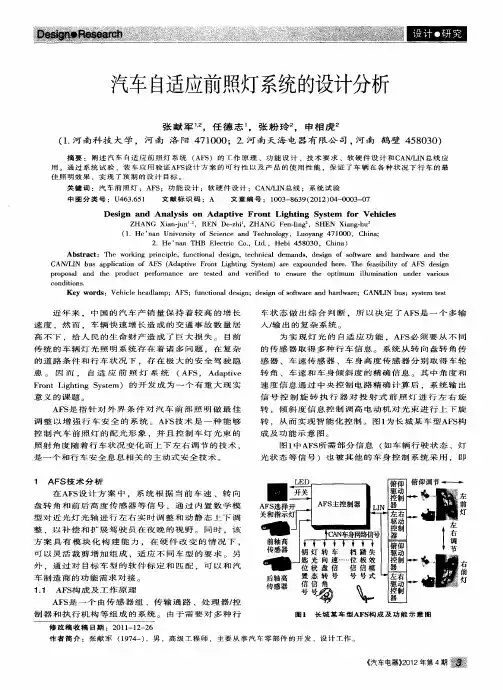
汽车自适应前照灯的功能设计及实现(1)介绍自适应前照灯系统(Adaptive Front-lighting System,AFS) 的产生背景、国内外发展概况;详细分析AFS 的6 种不同的照明模式:默认照明模式、高速公路照明模式、乡村照明模式、城市照明模式、弯道照明模式和恶劣天气照明模式; 就AFS 的以上功能,给出控制电路的硬件构成,系统由传感器组、传输通路、处理单元和执行机构4 部分组成。
通过对AFS 的理论阐述和实践分析,为国内在AFS技术上的进一步发展探索提供参考。
引言汽车介绍自适应前照灯系统(Adaptive Front-lightingSystem,AFS) 的产生背景、国内外发展概况;详细分析AFS 的6 种不同的照明模式:默认照明模式、高速公路照明模式、乡村照明模式、城市照明模式、弯道照明模式和恶劣天气照明模式; 就AFS 的以上功能,给出控制电路的硬件构成,系统由传感器组、传输通路、处理单元和执行机构4 部分组成。
通过对AFS 的理论阐述和实践分析,为国内在AFS技术上的进一步发展探索提供参考。
引言汽车前照灯是安全驾驶重要的一环,人们对前照灯的各方面要求越来越高,然而传统的前照灯只具有近光和远光2 种固定照明模式,不能满足客户需求。
如汽车在转弯时,由于传统前照灯的照明角度限制,存在照明暗区,会影响司机对弯道上障碍物的判断;雨天行驶时,地面的积水会反射迎面车辆前照灯的光线,造成司机眩目等。
由于这些问题的存在,使得夜间发生车祸的概率是白天的2 倍。
为了解决现存的这些问题,一种新的前照灯系统———自适应前照灯系统(AFS) 被提上开发日程。
该系统能够根据周边环境的变化适时自动地调整自身的配光方式,提供更适合的照明范围、照明距离和照明角度,提高驾驶的安全性及舒适度。
AFS 自1992年起被列为欧共体尤尼卡(EUREKA) 的1403号项目,欧洲的各大汽车公司和美国、日本的部分公司都参与了此项目。

汽车自适应前照明系统设计实现-设计管理论文-设计论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——摘要:主要讨论汽车自适应前照明系统设计与研究。
在对AFS系统现状及相关法规对AFS的规定进行分析说明的基础上,阐述了在C、V、E、W几种不同照明条件下的试验方法以及配光要求,以汽车前照灯照明需求为依据完成了自适应前照灯系统控制模型的构建,并在此基础上完成了一种自适应前照灯控制系统的设计,实验测试结果表明该控制模型具有较高的控制精度,可有效满足车辆对自适应前照明系统的控制需求。
关键词:汽车前照灯;照明系统;设计分析;控制模型引言随着经济社会的快速发展,在人们生活水平逐渐提高的基础上,汽车的保有量在呈不断上升的趋势,导致交通环境越来越复杂,交通事故频频发生,直接影响到人们的生命财产安全。
在众多的交通事故中,夜间行驶汽车很容易由于光线问题而发生交通事故,而光照主要由汽车前照灯所负责,在路况比较复杂的状态下,传统的汽车前照灯设计还不能够完全满足汽车的安全行驶。
如何设计并完善汽车前照明系统以提高驾驶的舒适性和安全性仍然是目前研究的重点之一[1]。
为此本文主要对汽车前照灯自适应系统进行了研究。
1需求分析安全是车辆行驶过程中的首要需求,一个先进、有效的前照灯已经成为保证驾驶人人身安全及汽车安全的必要前提,随着交通环境的日益复杂多变,传统的汽车前照灯必须进行优化与完善,从而产生了可以对汽车行驶状况自动匹配的新型前照灯,在现今技术的支撑下使汽车的安全系数得到显著提升。
汽车自适应前照灯可以根据车辆运行参数,对光线进行适当调整,满足驾驶员夜间行驶的安全需求,在确保汽车夜间行车安全方面起到重要作用。
汽车自适应前照灯相关研究已经取得了一定的成果,根据模型种类的不同,自适应前照灯控制研究可以分为关系模型,主要以前照灯转角和车辆运动参数进行建立。
通过微型相机对路况进行分析,对光照进行实时调整2类;根据不同的执行机构可分为:通过步进/直流电机对车灯旋转进行驱动、通过数字反光镜阵列的使用改变光型、通过LED阵列调整光型3类。
科技与创新┃Science and Technology&Innovation ·60·2022年第08期文章编号:2095-6835(2022)08-0060-03汽车自适应前照灯控制系统的设计*郭海,闻士硕,董高越,陈佩江(临沂大学机械与车辆工程学院,山东临沂276002)摘要:现在市场上汽车车灯照射范围和角度很多都是固定的,当汽车夜间在弯道上行驶时,前照灯无法调节前照灯光轴方向,由于灯光无法探测到弯道内侧从而出现“视野盲区”,驾驶员只能观察到前方灯光照射的地方,而弯道另一侧的情况信息不能及时获取,从而带来交通安全隐患。
基于方向盘转角等信息,设计了汽车自适应前照灯照明系统,根据前照灯转弯水平方向偏转模型,制定了自适应前照灯系统的控制策略。
汽车自适应前照灯控制系统能够根据车辆行驶状态、方向盘转角提供更加合理的照射范围,为驾驶员的行车安全提供更有力的保障。
关键词:自适应;前照灯;方向转角;控制策略中图分类号:TP273文献标志码:A DOI:10.15913/ki.kjycx.2022.08.018汽车前照灯自适应控制系统是现今汽车电子产业的必然产物,它通过对车速、方向盘转角信号的采集然后进行数据分析,从而实时调整两侧大灯的照射范围,使得灯光与汽车的前进方向始终保持一致,使驾驶员有更为合适的视野范围,确保了驾驶员在任何时刻都拥有最佳可见度,大大提高了夜间行车的安全[1]。
汽车自适应照明系统目前正处于迅速发展时期,国内研究尚处于起步阶段,基础理论还不完善,这给研究工作带来很大的机遇和挑战。
本项目针对传统汽车照明系统光型单一、无法进行故障预知、安全系数不高的现状,整合了全车灯光系统,设计了一种自适应的照明系统。
以最简单的方式实现了汽车的低成本、智能化照明。
1汽车自适应前照灯控制系统的总体设计汽车自适应前照灯控制系统主要由获取必要汽车行驶信息的各传感器(包括车速和方向盘转角等)、信号采集处理电路、驱动电路、执行电机等部分组成[2],系统主要可分为以下几个模块,如图1所示。
自适应前照明系统的探讨摘要随着科学技术的发展,汽车行驶去安全已经成为当今世界研究的一大主题,而夜间行车照明不佳是导致交通高事故率的重要原因。
为了改善汽车照明状况智能化的照明系统投入了使用,以减轻驾驶员的负担,并进一步提高汽车行驶的安全性。
自适应前照明系统(Adaptive Front-Lighting,简称AFS),是最近推出的一项主动安全技术,出现在了很多新上市的车型上。
它的功能伸缩性很大,根据在车辆照明实际使用过程中所遇到的所有问题而采取的技术革新,就目前能够实现的功能可以根据车辆的行驶状况、路况,以及天气等来适时自动的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优光照表现。
本文介绍了目前自适应前照明系统的技术和原理,通过分析自适应照明系统在各种工作环境下的功能和模式,对自适应照明系统的发展趋势进行了论述,指明了自适应照明系统前景广阔。
关键字:照明,自适应,安全,LED目录第一章绪论 (3)1.引言 (3)2.自适应前照明系统原理 (3)3.自适应前照明系统技术现状 (4)第二章自适应前照明系统的功能与原理 (5)1.默认照明模式 (5)2.乡村道路模式 (5)3.城市照明模式 (6)4.高速公路照明模式 (7)5.弯道照明模式 (8)6.恶劣天气照明模式 (9)第三章自适应前照明系统的发展趋势 (11)1.预见型AFS (11)2.传感器 (11)3.ECU的算法 (11)4.AFS光源 (12)结束语 (13)参考文献 (14)致谢 (15)桂林航天工业学院毕业设计(论文)第一章绪论1.引言随着社会的发展和技术的进步,汽车行驶的周边环境越来越复杂多样。
道路的限速不同、路面的照明不同、行人的密度不同、天气条件的环境不同,传统上只具有近光和远光两种照明模式的普通前照灯,已经无法满足人民日益增长的行驶安全需要。
因为汽车上安装的普通前照灯具有固定的照射范围,当夜间汽车在转弯时,由于普通前照灯无法改变调节照明角度的方向,常常会在弯道内侧出现“盲区”,司机的视线被禁锢在大灯光束照射的直线范围内,这对汽车夜间在弯道行驶时非常危险,极大地影响了夜间行车的安全性[1]。
车用自适应前照灯系统设计与研究
钱向明
【期刊名称】《机电工程》
【年(卷),期】2010(027)007
【摘要】为了实现前照灯系统能够自动根据车辆行驶状态灵活调整光轴位置和光照形式,结合车辆行驶特点,以国标GB7454-1987和CAN2.0通讯协议为设计准则,综合采用了控制器局域网(CAN)总线技术、传感器技术、控制技术,完成了自适应前照灯系统硬件及软件设计,并进行了实验室CAN/LIN台架试验和实车试验.台架试验表明,该系统的测试精度满足国标规定的使用要求,实车试验也表明,装配有自适应前照灯系统比未装配自适应前照灯系统的光照区域范围更加合理,极大地提高了行车安全性.
【总页数】4页(P104-107)
【作者】钱向明
【作者单位】金华职业技术学院,机电工程学院,浙江,金华,321017
【正文语种】中文
【中图分类】TH69;U463.65
【相关文献】
1.嵌入式系统的自适应前照灯系统设计 [J], 赵剑鹏;钟洪声
2.CAMERY自适应前照灯控制系统功能与检修 [J], 王文涛;汪俊;高波;黄建龙
3.基于环境的可调亮度汽车自适应前照灯系统 [J], 兰金耀;杨才生
4.自适应前照灯车灯模糊控制系统 [J], 郭青杰
5.汽车前照灯自适应系统的控制研究设计 [J], 朱丹;朱熀秋
因版权原因,仅展示原文概要,查看原文内容请购买。