现代控制理论离散系统
- 格式:pptx
- 大小:853.11 KB
- 文档页数:25

第二章 控制系统状态空间表达式的解建立了控制系统状态空间表达式之后,就是讨论求解的问题,本章重点讨论状态转移矩阵的定义,性质和计算方法,从而导出状态方程的求解公式并讨论连续时间系统状态方程的离散化的问题。
§2-1线性定常齐次状态方程的解(自由解)所谓自由解是指系统输入为零时,由初始状态引起的自由运动。
状态方程为齐次矩阵微分方程:AX X= (2-1)若初始时刻0t 时的状态给定为00)(x t x =,则式(2-1)有唯一确定解。
0)(0)(x e t x t t A -=,0t t ≥(2-2)若初始时刻从0=t 开始,即0)0(x x =,则其解为:0)(x e t x At =, 0t t ≥(2-3)证:先假设式(2-1)的解)(t x 为t 的矢量幂级数形式,即:+++++=k k t b t b t b b t x 2210)((2-4)对上式求导: ++++=-1232132)(k k t kb t b t b b t x代人式(2-1)得:A x= ( +++++kk t b t b t b b 2210) (2-5)既然式(2-4)是(2-1)的解,则式(2-5)对任意时刻t 都成立,故t 的同次幂项的系数应相等,有:01Ab b =,0212!2121b A Ab b ==,0323!3131b A Ab b ==,… 01!11b A k Ab kb k k k ==-,… 在式(2-4)中,令0=t ,可得:00)0(x x b == 将以上结果代人式(2-4),故得:022)!1!211()(x t A k t A At t x k k +++++= (2-6)括号内的展开式是n n ⨯矩阵,它是一个矩阵指数函数,记为At e221112!!At k ke At A t A t K =+++++ (2-7)式(2-6)可表示为:0()At x t e x =再用)(0t t -代替)0(-t ,即在代替t 的情况下,同样证明0)(0)(x e t x t t A -=的正确性。
前言本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。
本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。
由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。
书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。
由于时间比较仓促,可能存在错误,请读者批评、指正。
另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。
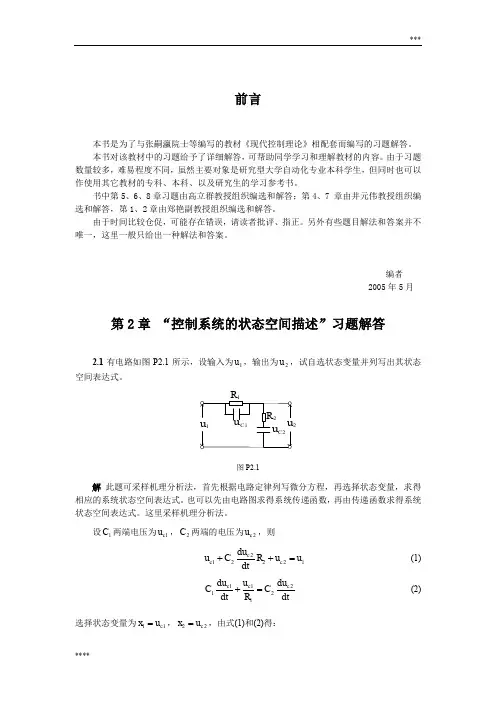
编者 2005年5月第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
《现代控制理论》MOOC课程1.5 离散时间系统、时变系统和非线性系统的状态空间表达式一. 时间离散系统离散系统的状态空间表达式可用差分方程组表示为x(k +1)=Gx(k)+Hu (k)y k =Cx k +Du(k)二. 线性时变系统其系数矩阵的元素中至少有一个元素是时间t 的函数;线性时变系统的状态空间表达式为:x =A t x +A t u y=C t x +D t u三. 非线性系统x =f (x,u , t )y=g (x,u,t)1.非线性时变系统的状态空间表达式式中,f ,g 为函数向量;x =f (x,u )y=g (x,u)2.非线性定常系统的状态空间表达式当非线性系统的状态方程中不显含时间t 时,则称为非线性定常系统3.非线性系统的线性化x =f (x,u )y =g (x,u)设是非线性系统x 0,u 0的一个平衡状态, 即。
f (x 0,u 0)=0 , y 0=g (x 0,u 0)若只考虑附近小范围的行为,则可将非线性系统取一次近似而予以线性化。
x 0,u 0,y 0将非线性函数f 、g 在附近作泰勒级数展开,并忽略高次项,仅保留一次项:x 0,u 0f x,u =f x 0,u 0+ðf ðx x 0,u 0δx +ðf ðu x 0,u 0δu g x,u =g x 0,u 0+ðg ðx x 0,u 0δx +ðg ðu x 0,u 0δu则非线性系统的一次线性化方程可表示为:δx =x −x 0=ðf ðx x 0,u 0δx +ðf ðu x0,u 0δu δy =y −y 0=ðg ðx x 0,u 0δx +ðg ðu x 0,u 0δu 将微增量用符号表示,线性化状态方程就表示为:δx ,δu ,δy x ,u ,y x=A x +B u y=C x +D u 其中,A =ðf ðx x 0,u 0,B =ðf ðu x 0,u 0,C =ðg ðx x 0,u 0,D =ðg ðu x 0,u 0第一章控制系统的状态空间表达式第一章小结状态变量、状态空间、状态空间表达式的定义建立系统状态空间表达式的方法,特别是状态变量选取的方法;状态空间表达式非奇异线性变换的方法;由状态空间表达式导出传递函数矩阵的方法;组合系统状态空间表达式的建立方法;离散系统、非线性系统状态空间的基本形式;。
第一章线性离散系统第一节概述随着微电子技术,计算机技术和网络技术的发展,采样系统和数字控制系统得到广泛的应用。
通常把采样系统,数字控制系统统称为离散系统。
一、举例自动测温,控温系统图;加热气体图解:1. 当炉温h变化时,测温电阻R变化→R∆,电桥失去平衡状态,检流计指针发生偏转,其偏转角度为)e;(t2. 检流计是个高灵敏度的元件,为防磨损不允许有摩擦力。
当凸轮转动使指针),接触时间为τ秒;与电位器相接触(凸轮每转的时间为T3. 当炉温h 连续变化时,电位器的输出是一串宽度为τ的脉冲信号e *τ(t);4.e *τ(t)为常值。
加热气体控制阀门角度调速器电动机放大器h →→→→→→ϕ 二、相关定义说明(通过上例来说明) 1. 信号采样偏差)(t e 是连续信号,电位器的输出的e *τ(t)是脉冲信号。
连续信号转变为脉冲信号的过程,成为采样或采样过程。
实现采样的装置成为采样器。
To —采样周期,f s =--To1采样频率,W s =2πf s —采样角频率 2.信号复现因接触时间很小,τo T 〈〈τ,故可把采样器的输出信号)(t e *近似看成是一串强度等于矩形脉冲面积的理想脉冲,为了去除采样本身带来的高额分量,需要把离散信号)(t e *恢复到原信号)(t e 。
实现方法:是在采样器之后串联一个保持器,及信号复现滤波器。
作用:是把)(t e *脉冲信号变成阶梯信号e h (t)3.采样系统结构图r(t),e(t),c(t),y(t)为连续信号,)(t e *为离散信号)(s G h ,)(s G p ,)(s H 分别为保持器,被控对象和反馈环节的传递函数。
(t)r4.采样系统工作过程⇒由保持器5. 采样控制方式采样周期To ⎪⎩⎪⎨⎧=≠=⇒相位不同步采样常数常数6. 采样系统的研究方法(或称使用的数字工具)因运算过程中出现s 的超越函数,故不用拉式变换法,二采用z 变换方法,状态空间法。
控制理论与控制系统的发展历史及趋势控制论一词Cybernetics,来自希腊语,原意为掌舵术,包含了调节、操纵、管理、指挥、监督等多方面的涵义。
因此“控制”这一概念本身即反映了人们对征服自然与外在的渴望,控制理论与技术也自然而然地在人们认识自然与改造自然的历史中发展起来。
根据控制理论的理论基础及所能解决的问题的难易程度,我们把控制理论大体的分为了三个不同的阶段。
这种阶段性的发展过程是由简单到复杂、由量变到质变的辩证发展过程。
一、经典控制论阶段(20世纪50年代末期以前)经典控制理论,是以传递函数为基础,在频率域对单输入---单输入控制系统进行分析与设计的理论。
1、控制系统的特点单输入---单输出系统的,线性定常或非线性系统中的相平面法也只含两个变量的系统。
2、控制思路基于频率域内传递函数的“反馈”和“前馈”控制思想,运用频率特性分析法、根轨迹分析法、描述函数法、相平面法、波波夫法,解决稳定性问题。
3、发展事件回顾1)我国古人发明的指南车就应用了反馈的原理2)1788年J.Watt在发明蒸汽机的同时应用了反馈思想设计了离心式飞摆控速器,这是第一个反馈系统的方案。
3)1868年J.C.Maxwell为解决离心式飞摆控速器控制精度和稳定性之间的矛盾,发表《论调速器》,提出了用基本系统的微分方正模型分析反馈系统的数学方法。
4)1868年,韦士乃格瑞斯克阐述了调节器的数学理论。
5)1875年E.J.Routh和A.Hurwitz提出了根据代数方程的系数判断线性系统稳定性方法6)1876年俄国学者N.A.维什涅格拉诺基发表著作《论调速器的一般理论》,对调速器系统进行了全面的理论阐述。
7)1895年劳斯与古尔维茨分别提出了基于特征特征根和行列式的稳定性代数判别方法。
8)1927年H.S.Black发现了采用负反馈线路的放大器,引入负反馈后,放大器系统对扰动和放大器增益变化的敏感性大为降低。
9)1932年H.Nyquest采用频率特性表示系统,提出了频域稳定性判据,很好地解决了Black 放大器的稳定性问题,而且可以分析系统的稳定裕度,奠定了频域法分析与综合的基础。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 控制理论的应用领域第二章:控制系统数学模型2.1 连续控制系统数学模型2.2 离散控制系统数学模型2.3 状态空间描述2.4 系统矩阵的性质与运算第三章:线性系统的时域分析3.1 系统的稳定性3.2 系统的瞬时性3.3 系统的稳态性能3.4 系统的动态性能第四章:线性系统的频域分析4.1 频率响应的概念4.2 频率响应的性质4.3 系统频率响应的求取方法4.4 系统频域性能指标第五章:线性系统的校正与设计5.1 系统校正的基本概念5.2 常用校正器及其特性5.3 系统校正的方法5.4 系统校正实例分析第六章:非线性控制系统分析6.1 非线性系统的基本概念6.2 非线性系统的数学模型6.3 非线性系统的稳定性分析6.4 非线性系统的控制策略第七章:状态反馈与观测器设计7.1 状态反馈控制的基本原理7.2 状态反馈控制器的设计方法7.3 观测器的设计与分析7.4 状态反馈控制系统应用实例第八章:先进控制策略8.1 鲁棒控制8.2 自适应控制8.3 最优控制8.4 智能控制第九章:最优控制理论9.1 最优控制的基本概念9.2 线性二次调节器(LQR)9.3 离散时间最优控制9.4 最优控制的应用第十章:现代控制理论在工程应用10.1 现代控制理论在自动化领域的应用10.2 现代控制理论在控制中的应用10.3 现代控制理论在航空航天领域的应用10.4 现代控制理论在其他领域的应用第十一章:鲁棒控制理论11.1 鲁棒控制的基本概念11.2 鲁棒控制的设计方法11.3 鲁棒控制的应用实例11.4 鲁棒控制在实际系统中的性能评估第十二章:自适应控制理论12.1 自适应控制的基本概念12.2 自适应控制的设计方法12.3 自适应控制的应用实例12.4 自适应控制在复杂系统中的应用与挑战第十三章:数字控制系统设计13.1 数字控制系统的概述13.2 数字控制器的设计方法13.3 数字控制系统的仿真与实验13.4 数字控制系统在实际应用中的案例分析第十四章:控制系统中的计算机辅助设计14.1 计算机辅助设计的基本概念14.2 控制系统CAD工具与方法14.3 基于软件的控制系统设计与仿真14.4 控制系统CAD在现代工程中的应用案例第十五章:现代控制理论的前沿与发展15.1 现代控制理论的最新研究动态15.2 控制理论与其他领域的交叉融合15.3 未来控制理论的发展趋势15.4 控制理论在解决现实世界问题中的潜力与挑战重点和难点解析本《现代控制理论》教案大纲涵盖了现代控制理论的基本概念、方法与应用,分为十五个章节。