现代控制理论(第三章)
- 格式:ppt
- 大小:10.78 MB
- 文档页数:60

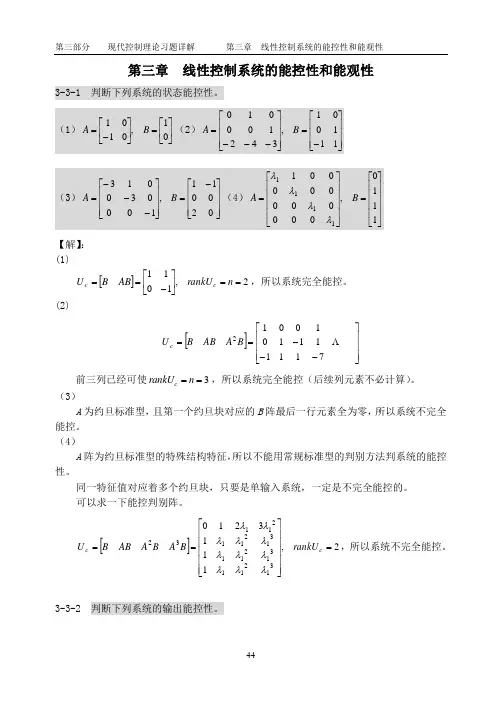
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。