
Freescale Semiconductor Document Number: MMA8451Q
Data Sheet: Technical Data
Rev. 9.1, 06/2015
An Energy Efficient Solution by Freescale
? 2010-2015 Freescale Semiconductor, Inc. All rights reserved.
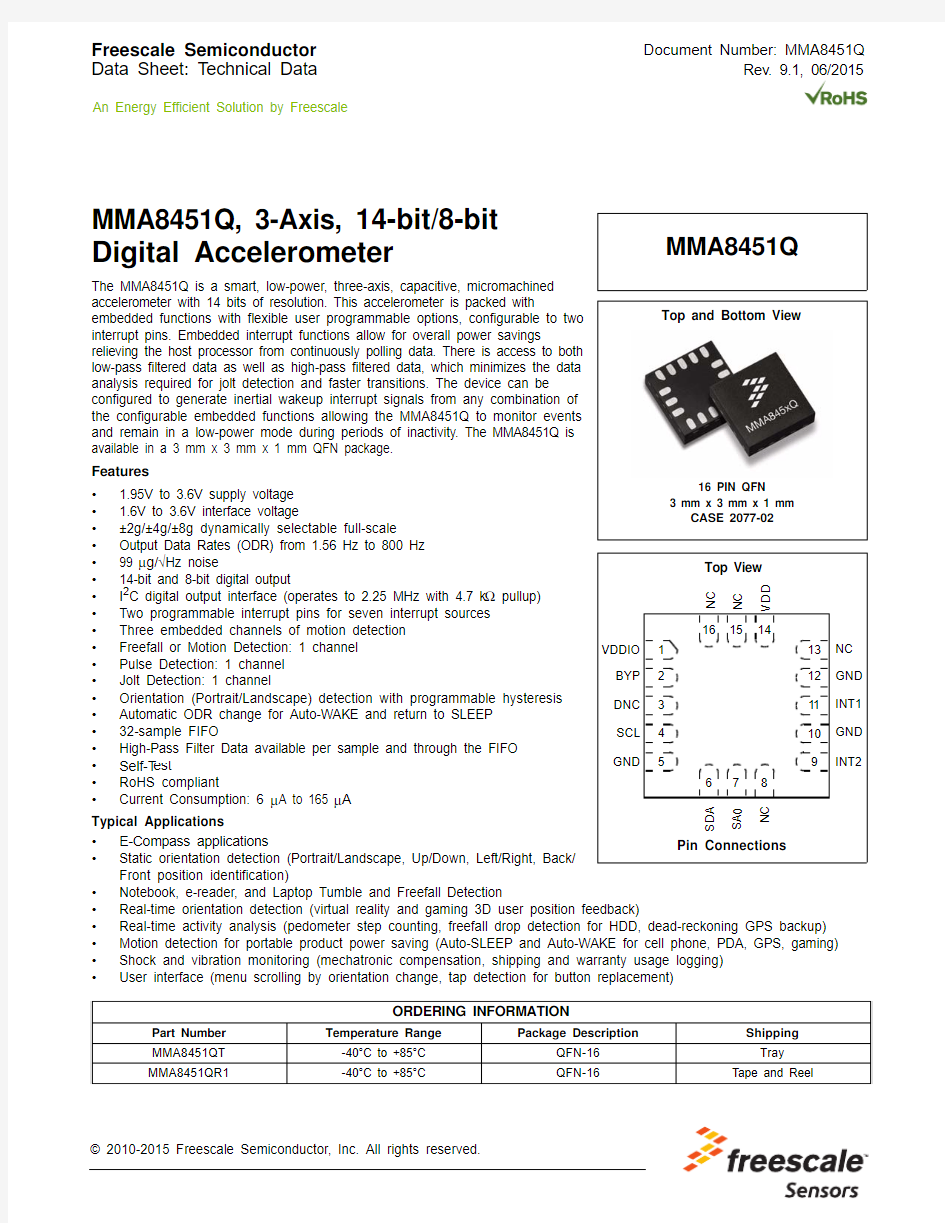
MMA8451Q, 3-Axis, 14-bit/8-bit
Digital Accelerometer
The MMA8451Q is a smart, low-power, three-axis, capacitive, micromachined accelerometer with 14 bits of resolution. This accelerometer is packed with
embedded functions with flexible user programmable options, configurable to two interrupt pins. Embedded interrupt functions allow for overall power savings
relieving the host processor from continuously polling data. There is access to both low-pass filtered data as well as high-pass filtered data, which minimizes the data analysis required for jolt detection and faster transitions. The device can be
configured to generate inertial wakeup interrupt signals from any combination of the configurable embedded functions allowing the MMA8451Q to monitor events and remain in a low-power mode during periods of inactivity . The MMA8451Q is available in a 3 mm x 3 mm x 1 mm QFN package. Features ? 1.95V to 3.6V supply voltage ? 1.6V to 3.6V interface voltage
?±2g/±4g/±8g dynamically selectable full-scale ?Output Data Rates (ODR) from 1.56 Hz to 800 Hz ?99 μg/√Hz noise
?14-bit and 8-bit digital output
?I 2C digital output interface (operates to 2.25 MHz with 4.7 k Ω pullup)?Two programmable interrupt pins for seven interrupt sources ?Three embedded channels of motion detection ?Freefall or Motion Detection: 1 channel ?Pulse Detection: 1 channel ?Jolt Detection: 1 channel
?Orientation (Portrait/Landscape) detection with programmable hysteresis ?Automatic ODR change for Auto-WAKE and return to SLEEP ?32-sample FIFO
?High-Pass Filter Data available per sample and through the FIFO ?Self-T est
?RoHS compliant
?
Current Consumption: 6 μA to 165 μA
Typical Applications ?E-Compass applications ?Static orientation detection (Portrait/Landscape, Up/Down, Left/Right, Back/
Front position identification)?Notebook, e-reader, and Laptop Tumble and Freefall Detection ?Real-time orientation detection (virtual reality and gaming 3D user position feedback)?Real-time activity analysis (pedometer step counting, freefall drop detection for HDD, dead-reckoning GPS backup)?Motion detection for portable product power saving (Auto-SLEEP and Auto-WAKE for cell phone, PDA, GPS, gaming)?Shock and vibration monitoring (mechatronic compensation, shipping and warranty usage logging)?User interface (menu scrolling by orientation change, tap detection for button replacement)
ORDERING INFORMATION
Part Number Temperature Range Package Description
Shipping MMA8451QT -40°C to +85°C QFN-16Tray MMA8451QR1
-40°C to +85°C
QFN-16
Tape and Reel 16 PIN QFN
3 mm x 3 mm x 1 mm
CASE 2077-02
MMA8451Q
Top and Bottom View
Top View
Pin Connections 12345
9
1011121314
15
16
876N C V D D N C VDDIO BYP DNC SCL GND
NC GND INT1GND INT2
S A 0
N C
S D A
Contents
1Block Diagram and Pin Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2Mechanical and Electrical Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1Mechanical Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2Electrical Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3I2C interface characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4Absolute Maximum Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 3Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1Sensitivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2Zero-g Offset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3Self-Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 4System Modes (SYSMOD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 5Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.1Device Calibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.28-bit or 14-bit Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.3Internal FIFO Data Buffer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.4Low Power Modes vs. High Resolution Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.5Auto-WAKE/SLEEP Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.6Freefall and Motion Detection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.7Transient Detection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.8Tap Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.9Orientation Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.10Interrupt Register Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.11Serial I2C Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 6Register Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.1Data Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.232 Sample FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.3Portrait/Landscape Embedded Function Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.4Motion and Freefall Embedded Function Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6.5Transient (HPF) Acceleration Detection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.6Single, Double and Directional Tap Detection Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.7Auto-WAKE/SLEEP Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.8Control Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.9User Offset Correction Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 7Printed Circuit Board Layout and Device Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.1Printed Circuit Board Layout. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.2Overview of Soldering Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.3Halogen Content. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 8Package Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.1Product identification markings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.2Tape and reel information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.3Package Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 9Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Related Documentation
The MMA8451Q device features and operations are described in a variety of reference manuals, user guides, and application notes. To find the most-current versions of these documents:
1.Go to the Freescale homepage at:
https://www.doczj.com/doc/4c12761800.html,/
2.In the Keyword search box at the top of the page, enter the device number MMA8451Q.
3.In the Refine Your Result pane on the left, click on the Documentation link.
MMA8451Q
Sensors
MMA8451Q
Sensors
1Block Diagram and Pin Description
Figure 1. Block Diagram
Figure 2. Direction of the Detectable Accelerations
Auto-WAKE/SLEEP
ACTIVE Mode
SLEEP
MODE Options Low Power
Low Noise + Low Power High Resolution Normal
MODE Options Low Power
Low Noise + Low Power High Resolution Normal
ACTIVE Mode
WAKE
MMA8451Q Sensors
Figure 3 shows the device configuration in the 6 different orientation modes. These orientations are defined as the following: PU = Portrait Up, LR = Landscape Right, PD = Portrait Down, LL = Landscape Left, BACK and FRONT side views. There are several registers to configure the orientation detection and are described in detail in the register setting section.
Figure 3. Landscape/Portrait Orientation
Top View
PU
Earth Gravity
Pin 1
Xout @ 0g Yout @ -1g Zout @ 0g
Xout @ 1g Yout @ 0g Zout @ 0g
Xout @ 0g Yout @ 1g Zout @ 0g
Xout @ -1g Yout @ 0g Zout @ 0g
LL
PD
LR
Side View
FRONT
Xout @ 0g Yout @ 0g Zout @ 1g
BACK
Xout @ 0g Yout @ 0g Zout @ -1g
Table1. Pin Description
Pin #Pin Name Description
1VDDIO Internal Power Supply (1.62V - 3.6V)
2BYP Bypass capacitor (0.1 μF)
3DNC Do not connect to anything, leave pin isolated and floating.
4SCL I2C Serial Clock, open drain
5GND Connect to Ground
6SDA I2C Serial Data
7SA0I2C Least Significant Bit of the Device I2C Address, I2C 7-bit address = 0x1C (SA0=0), 0x1D (SA0=1).
8NC Internally not connected
9INT2Inertial Interrupt 2, output pin
10GND Connect to Ground
11INT1Inertial Interrupt 1, output pin
12GND Connect to Ground
13NC Internally not connected
14VDD Power Supply (1.95V to 3.6V)
15NC Internally not connected
16NC Internally not connected (can be GND or VDD)
The device power is supplied through VDD line. Power supply decoupling capacitors (100 nF ceramic plus 4.7 μF bulk, or a single 4.7 μF ceramic) should be placed as near as possible to the pins 1 and 14 of the device.
The control signals SCL, SDA, and SA0 are not tolerant of voltages more than VDDIO + 0.3V. If VDDIO is removed, the control signals SCL, SDA, and SA0 will clamp any logic signals with their internal ESD protection diodes.
The functions, the threshold and the timing of the two interrupt pins (INT1 and INT2) are user programmable through the I2C interface. The SDA and SCL I2C connections are open drain and therefore require a pullup resistor as shown in the application diagram in Figure 4.
MMA8451Q Sensors
MMA8451Q Sensors
2
Mechanical and Electrical Specifications
2.1
Mechanical Characteristics
Table 2. Mechanical Characteristics @ VDD = 2.5V, VDDIO = 1.8V, T = 25°C unless otherwise noted .
Parameter
Test Conditions Symbol
Min
Typ Max
Unit
Measurement Range (1)
1.Dynamic Range is limited to 4g when the Low Noise bit in Register 0x2A, bit 2 is set.
FS[1:0] set to 00
2g Mode
FS ±2
g
FS[1:0] set to 01
4g Mode ±4FS[1:0] set to 10
8g Mode ±8
Sensitivity
FS[1:0] set to 00
2g Mode
So 4096
counts/g
FS[1:0] set to 01
4g Mode 2048FS[1:0] set to 10
8g Mode
1024
Sensitivity Accuracy (2)
2.Sensitivity remains in spec as stated, but changing Oversampling mode to Low Power causes 3% sensitivity shift. This behavior is also seen when changing from 800 Hz to any other data rate in the Normal, Low Noise + Low Power or High Resolution mode.Soa
±2.64
%
Sensitivity Change vs. Temperature
FS[1:0] set to 00
2g Mode
TCSo ±0.008%/°C
FS[1:0] set to 01
4g Mode FS[1:0] set to 10
8g Mode
Zero-g Level Offset Accuracy (3)
3.Before board mount.
FS[1:0] 2g, 4g, 8g TyOff ±17mg Zero-g Level Offset Accuracy Post Board Mount (4)4.Post Board Mount Offset Specifications are based on an 8 Layer PCB, relative to 25°C.FS[1:0] 2g, 4g, 8g TyOffPBM ±20mg Zero-g Level Change vs. Temperature -40°C to 85°C
TCOff
±0.15
mg/°C
Self-Test Output Change (5)X Y Z
5.Self-Test is one direction only.
FS[1:0] set to 04g Mode
Vst
+181+255+1680
LSB
ODR Accuracy 2 MHz Clock
±2
%Output Data Bandwidth BW ODR/3
ODR/2
Hz Output Noise
Normal Mode ODR = 400 Hz Noise 126μg/√Hz Output Noise Low Noise Mode (1)Normal Mode ODR = 400 Hz
Noise 99
μg/√Hz Operating Temperature Range
Top
-40+85°C
MMA8451Q
Sensors
2.2Electrical Characteristics
Table 3. Electrical Characteristics @ VDD = 2.5V, VDDIO = 1.8V, T = 25°C unless otherwise noted .
Parameter
Test Conditions
Symbol Min Typ Max Unit Supply Voltage
VDD (1)1.There is no requirement for power supply sequencing. The VDDIO input voltage can be higher than the VDD input voltage.
1.95
2.5
3.6V Interface Supply Voltage
VDDIO (1)
1.62
1.8 3.6
V
Low Power Mode
ODR = 1.56 Hz I dd LP
6μA
ODR = 6.25 Hz 6ODR = 12.5 Hz
6
ODR = 50 Hz 14ODR = 100 Hz 24ODR = 200 Hz 44ODR = 400 Hz 85ODR = 800 Hz 165Normal Mode
ODR = 1.56 Hz I dd
24μA ODR = 6.25 Hz 24ODR = 12.5 Hz
24
ODR = 50 Hz 24ODR = 100 Hz 44ODR = 200 Hz 85ODR = 400 Hz 165ODR = 800 Hz
165
Current during Boot Sequence, 0.5 mSec max duration using recommended Bypass Cap VDD = 2.5V Idd Boot 1mA Value of Capacitor on BYP Pin -40°C 85°C
Cap 75
100470nF STANDBY Mode Current @25°C VDD = 2.5V, VDDIO = 1.8V
STANDBY Mode
I dd Stby
1.8
5
μA Digital High Level Input Voltage SCL, SDA, SA0
VIH 0.75*VDDIO
V Digital Low Level Input Voltage SCL, SDA, SA0
VIL
0.3*VDDIO
V High Level Output Voltage INT1, INT2
I O = 500 μA VOH 0.9*VDDIO
V Low Level Output Voltage INT1, INT2
I O = 500 μA VOL 0.1*VDDIO V Low Level Output Voltage SDA
I O = 500 μA
VOLS
0.1*VDDIO
V Power on Ramp Time
0.001
1000
ms Boot time
Time from VDDIO on and VDD > VDD min until I 2C is ready for operation, Cbyp = 100nF Tbt 350500 μs
Turn-on time Time to obtain valid data from STANDBY mode to ACTIVE mode.Ton12/ODR + 1 ms Turn-on time
Time to obtain valid data from valid
voltage applied.
Ton22/ODR + 2 ms
Operating Temperature Range
Top
-40
+85
°C
MMA8451Q Sensors
2.3
I 2C interface characteristics
Figure 5. I 2C slave timing diagram
Table 4. I 2C slave timing values (1)
1.All values referred to V IH(min) (0.3V DD ) and V IL(max) (0.7V DD ) levels.Parameter
Symbol I 2C Fast Mode Unit Min Max SCL clock frequency
f SCL 0400
kHz Bus-free time between STOP and START condition t BUF 1.3μs (Repeated) START hold time t HD;STA 0.6μs Repeated START setup time t SU;STA 0.6μs STOP condition setup time t SU;STO 0.6μs SDA data hold time t HD;DAT 0.050.9 (2)2.This device does not stretch the LOW period (t LOW ) of the SCL signal.μs SDA setup time t SU;DAT 100ns SCL clock low time t LOW 1.3μs SCL clock high time t HIGH 0.6μs SDA and SCL rise time t r 20 + 0.1 C b (3)3.C b = total capacitance of one bus line in pF.
300ns SDA and SCL fall time t f 20 + 0.1 C b (3)
300ns SDA valid time (4)
4.t VD;DAT = time for data signal from SCL LOW to SDA output (HIGH or LOW, depending on which one is worse).
t VD;DAT 0.9(2)μs SDA valid acknowledge time (5)
5.t VD;ACK = time for Acknowledgement signal from SCL LOW to SDA output (HIGH or LOW, depending on which one is worse).
t VD;ACK 0.9(2)μs Pulse width of spikes on SDA and SCL that must be suppressed by internal input filter
t SP 0
50ns Capacitive load for each bus line
Cb
400pF
V IL = 0.3V DD V IH = 0.7V DD
MMA8451Q
Sensors
2.4Absolute Maximum Ratings
Stresses above those listed as “absolute maximum ratings” may cause permanent damage to the device. Exposure to maximum rating conditions for extended periods may affect device reliability.Table 5. Maximum Ratings
Rating
Symbol Value Unit Maximum Acceleration (all axes, 100 μs)g max 5,000g Supply Voltage
VDD -0.3 to + 3.6V Input voltage on any control pin (SA0, SCL, SDA)Vin -0.3 to VDDIO + 0.3
V Drop Test
D drop 1.8m Operating Temperature Range T OP -40 to +85°C Storage Temperature Range
T STG
-40 to +125
°C
Table 6. ESD and Latchup Protection Characteristics
Rating
Symbol Value Unit Human Body Model HBM ±2000V Machine Model MM ±200V Charge Device Model CDM ±500V Latchup Current at T = 85°C
—
±100
mA
This device is sensitive to mechanical shock. Improper handling can cause permanent damage of the part or cause the part to otherwise fail.
This device is sensitive to ESD, improper handling can cause permanent damage to the part.
3Terminology
3.1Sensitivity
The sensitivity is represented in counts/g. In 2g mode the sensitivity is 4096 counts/g. In 4g mode the sensitivity is 2048 counts/
g and in 8g mode the sensitivity is 1024 counts/g.
3.2Zero-g Offset
Zero-g Offset (TyOff) describes the deviation of an actual output signal from the ideal output signal if the sensor is stationary. A sensor stationary on a horizontal surface will measure 0g in X-axis and 0g in Y-axis whereas the Z-axis will measure 1g. The output is ideally in the middle of the dynamic range of the sensor (content of OUT Registers 0x00, data expressed as 2's complement number). A deviation from ideal value in this case is called Zero-g offset. Offset is to some extent a result of stress on the MEMS sensor and therefore the offset can slightly change after mounting the sensor onto a printed circuit board or exposing it to extensive mechanical stress.
3.3Self-Test
Self-T est checks the transducer functionality without external mechanical stimulus. When Self-T est is activated, an electrostatic actuation force is applied to the sensor, simulating a small acceleration. In this case, the sensor outputs will exhibit a change in their DC levels which are related to the selected full scale through the device sensitivity. When Self-T est is activated, the device output level is given by the algebraic sum of the signals produced by the acceleration acting on the sensor and by the electrostatic test-force.
MMA8451Q
Sensors
MMA8451Q
Sensors
4System Modes (SYSMOD)
Figure 6. MMA8451Q Mode Transition Diagram
All register contents are preserved when transitioning from ACTIVE to STANDBY mode. Some registers are reset when transitioning from STANDBY to ACTIVE. These are all noted in the device memory map register table. The SLEEP and WAKE modes are ACTIVE modes. For more information on how to use the SLEEP and WAKE modes and how to transition between these modes, please refer to the functionality section of this document.
Table 7. Mode of Operation Description
Mode I 2C Bus State
VDD
Function Description
OFF
Powered Down
<1.8V
VDDIO Can be > VDD
?The device is powered off.
?All analog and digital blocks are shutdown.
?I 2C bus inhibited.
STANDBY
I 2C communication is possible
>1.8V
?Only digital blocks are enabled. Analog subsystem is disabled.?Internal clocks disabled.
?Registers accessible for Read/Write.?Device is configured in STANDBY mode.ACTIVE (WAKE/SLEEP)
I 2C communication is possible
>1.8V
?All blocks are enabled (digital, analog).
OFF
WAKE STANDBY OFF
ACTIVE
SYSMOD = 00
SYSMOD = 10
SYSMOD = 01
Auto SLEEP/WAKE
Condition
VDD > 1.8 V
VDD < 1.8 V
CTRL_REG1Active bit = 1CTRL_REG1Active bit = 0
CTRL_REG1Active bit = 0
MMA8451Q Sensors
5Functionality
The MMA8451Q is a low-power, digital output 3-axis linear accelerometer with a I 2C interface and embedded logic used to detect events and notify an external microprocessor over interrupt lines. The functionality includes the following:
?8-bit or 14-bit data, High-Pass Filtered data, 8-bit or 14-bit configurable 32 sample FIFO
?Four different oversampling options for compromising between resolution and current consumption based on application
requirements
?Additional Low Noise mode that functions independently of the Oversampling modes for higher resolution ?Low Power and Auto-WAKE/SLEEP modes for conservation of current consumption ?Single/Double tap with directional information 1 channel
?Motion detection with directional information or Freefall 1 channel
?Transient/Jolt detection based on a high-pass filter and settable threshold for detecting the change in acceleration above
a threshold with directional information 1 channel
?Flexible user configurable portrait landscape detection algorithm addressing many use cases for screen orientation All functionality is available in 2g, 4g or 8g dynamic ranges. There are many configuration settings for enabling all the different functions. Separate application notes have been provided to help configure the device for each embedded functionality .5.1Device Calibration
The device interface is factory calibrated for sensitivity and Zero-g offset for each axis. The trim values are stored in Non Volatile Memory (NVM). On power-up, the trim parameters are read from NVM and applied to the circuitry . In normal use, further calibration in the end application is not necessary . However, the MMA8451Q allows the user to adjust the Zero-g offset for each axis after power-up, changing the default offset values. The user offset adjustments are stored in 6 volatile registers. For more information on device calibration, refer to Freescale application note, AN4069.
Table 8. Features of the MMA845xQ devices
Feature List
MMA8451
MMA8452
MMA8453
Digital Resolution (Bits)141210Digital Sensitivity (Counts/g)40961024256Data-Ready Interrupt Yes Yes Yes Single-Pulse Interrupt Yes Yes Yes Double-Pulse Interrupt Yes Yes Yes Directional-Pulse Interrupt Yes Yes Yes Auto-WAKE Yes Yes Yes Auto-SLEEP Yes Yes Yes Freefall Interrupt Yes Yes Yes 32 Level FIFO Yes No No High-Pass Filter Yes Yes Yes Low-Pass Filter
Yes Yes Yes Orientation Detection Portrait/Landscape = 30°, Landscape to Portrait = 60°, and Fixed 45° Threshold
Yes Yes Yes Programmable Orientation Detection Yes No No Motion Interrupt with Direction
Yes Yes Yes Transient Detection with High-Pass Filter Yes Yes Yes Low Power Mode
Yes
Yes
Yes
5.28-bit or 14-bit Data
The measured acceleration data is stored in the OUT_X_MSB, OUT_X_LSB, OUT_Y_MSB, OUT_Y_LSB, OUT_Z_MSB, and OUT_Z_LSB registers as 2’s complement 14-bit numbers. The most significant 8-bits of each axis are stored in OUT_X (Y,
Z)_MSB,so applications needing only 8-bit results can use these 3 registers and ignore OUT_X,Y, Z_LSB. To do this, the
F_READ bit in CTRL_REG1 must be set. When the F_READ bit is cleared, the fast read mode is disabled.
When the full-scale is set to 2g, the measurement range is -2g to +1.99975g, and each count corresponds to 1g/4096
(0.25 mg) at 14-bits resolution. When the full-scale is set to 8g, the measurement range is -8g to +7.999g, and each count corresponds to 1g/1024 (0.98 mg) at 14-bits resolution. The resolution is reduced by a factor of 64 if only the 8-bit results are used. For more information on the data manipulation between data formats and modes, refer to Freescale application.
5.3Internal FIFO Data Buffer
MMA8451Q contains a 32 sample internal FIFO data buffer minimizing traffic across the I2C bus. The FIFO can also provide power savings of the system by allowing the host processor/MCU to go into a SLEEP mode while the accelerometer independently stores the data, up to 32 samples per axis. The FIFO can run at all output data rates. There is the option of accessing the full
14-bit data or for accessing only the 8-bit data. When access speed is more important than high resolution the 8-bit data read is a better option.
The FIFO contains four modes (Fill Buffer Mode, Circular Buffer Mode, Trigger Mode, and Disabled Mode) described in the F_SETUP Register 0x09. Fill Buffer Mode collects the first 32 samples and asserts the overflow flag when the buffer is full and another sample arrives. It does not collect any more data until the buffer is read. This benefits data logging applications where all samples must be collected. The Circular Buffer Mode allows the buffer to be filled and then new data replaces the oldest sample in the buffer. The most recent 32 samples will be stored in the buffer. This benefits situations where the processor is waiting for an specific interrupt to signal that the data must be flushed to analyze the event. The trigger mode will hold the last data up to the point when the trigger occurs and can be set to keep a selectable number of samples after the event occurs.
The MMA8451Q FIFO Buffer has a configurable watermark, allowing the processor to be triggered after a configurable number of samples has filled in the buffer (1 to 32).
For details on the configurations for the FIFO buffer as well as more specific examples and application benefits, refer to Freescale application note, AN4073.
5.4Low Power Modes vs. High Resolution Modes
The MMA8451Q can be optimized for lower power modes or for higher resolution of the output data. High resolution is achieved by setting the LNOISE bit in Register 0x2A. This improves the resolution but be aware that the dynamic range is limited to 4g when this bit is set. This will affect all internal functions and reduce noise. Another method for improving the resolution of the data is by oversampling. One of the oversampling schemes of the data can activated when MODS = 10 in Register 0x2B which will improve the resolution of the output data only. The highest resolution is achieved at 1.56 Hz.
There is a trade-off between low power and high resolution. Low Power can be achieved when the oversampling rate is reduced. The lowest power is achieved when MODS = 11 or when the sample rate is set to 1.56 Hz. For more information on how to configure the MMA8451Q in Low Power mode or High Resolution mode and to realize the benefits, refer to Freescale application note, AN4075.
5.5Auto-WAKE/SLEEP Mode
The MMA8451Q can be configured to transition between sample rates (with their respective current consumption) based on four of the interrupt functions of the device. The advantage of using the Auto-WAKE/SLEEP is that the system can automatically transition to a higher sample rate (higher current consumption) when needed but spends the majority of the time in the SLEEP mode (lower current) when the device does not require higher sampling rates. Auto-WAKE refers to the device being triggered by one of the interrupt functions to transition to a higher sample rate. This may also interrupt the processor to transition from a SLEEP mode to a higher power mode.
SLEEP mode occurs after the accelerometer has not detected an interrupt for longer than the user definable time-out period. The device will transition to the specified lower sample rate. It may also alert the processor to go into a lower power mode to save on current during this period of inactivity.
The Interrupts that can WAKE the device from SLEEP are the following: T ap Detection, Orientation Detection, Motion/Freefall, and Transient Detection. The FIFO can be configured to hold the data in the buffer until it is flushed if the FIFO Gate bit is set in Register 0x2C but the FIFO cannot WAKE the device from SLEEP.
The interrupts that can keep the device from falling asleep are the same interrupts that can wake the device with the addition of the FIFO. If the FIFO interrupt is enabled and data is being accessed continually servicing the interrupt then the device will remain in the WAKE mode. Refer to AN4074, for more detailed information for configuring the Auto-WAKE/SLEEP.
MMA8451Q Sensors
5.6Freefall and Motion Detection
MMA8451Q has flexible interrupt architecture for detecting either a Freefall or a Motion. Freefall can be enabled where the set threshold must be less than the configured threshold, or motion can be enabled where the set threshold must be greater than the threshold. The motion configuration has the option of enabling or disabling a high-pass filter to eliminate tilt data (static offset). The freefall does not use the high-pass filter. For details on the Freefall and Motion detection with specific application examples and recommended configuration settings, refer to Freescale application note, AN4070.
5.6.1Freefall Detection
The detection of “Freefall” involves the monitoring of the X, Y, and Z axes for the condition where the acceleration magnitude is below a user specified threshold for a user definable amount of time. Normally, the usable threshold ranges are between
±100 mg and ±500 mg.
5.6.2Motion Detection
Motion is often used to simply alert the main processor that the device is currently in use. When the acceleration exceeds a set threshold the motion interrupt is asserted. A motion can be a fast moving shake or a slow moving tilt. This will depend on the threshold and timing values configured for the event. The motion detection function can analyze static acceleration changes or faster jolts. For example, to detect that an object is spinning, all three axes would be enabled with a threshold detection of > 2g. This condition would need to occur for a minimum of 100 ms to ensure that the event wasn't just noise. The timing value is set by a configurable debounce counter. The debounce counter acts like a filter to determine whether the condition exists for configurable set of time (i.e., 100 ms or longer). There is also directional data available in the source register to detect the direction of the motion. This is useful for applications such as directional shake or flick, which assists with the algorithm for various gesture detections.
5.7Transient Detection
The MMA8451Q has a built-in high-pass filter. Acceleration data goes through the high-pass filter, eliminating the offset (DC) and low frequencies. The high-pass filter cutoff frequency can be set by the user to four different frequencies which are dependent on the Output Data Rate (ODR). A higher cutoff frequency ensures the DC data or slower moving data will be filtered out, allowing only the higher frequencies to pass. The embedded Transient Detection function uses the high-pass filtered data allowing the user to set the threshold and debounce counter. The transient detection feature can be used in the same manner as the motion detection by bypassing the high-pass filter. There is an option in the configuration register to do this. This adds more flexibility to cover various customer use cases.
Many applications use the accelerometer’s static acceleration readings (i.e., tilt) which measure the change in acceleration due to gravity only. These functions benefit from acceleration data being filtered with a low-pass filter where high frequency data is considered noise. However, there are many functions where the accelerometer must analyze dynamic acceleration. Functions such as tap, flick, shake and step counting are based on the analysis of the change in the acceleration. It is simpler to interpret these functions dependent on dynamic acceleration data when the static component has been removed. The Transient Detection function can be routed to either interrupt pin through bit 5 in CTRL_REG5 register (0x2E). Registers 0x1D – 0x20 are the dedicated Transient Detection configuration registers. The source register contains directional data to determine the direction of the acceleration, either positive or negative. For details on the benefits of the embedded Transient Detection function along with specific application examples and recommended configuration settings, please refer to Freescale application note, AN4071. 5.8Tap Detection
The MMA8451Q has embedded single/double and directional tap detection. This function has various customizing timers for setting the pulse time width and the latency time between pulses. There are programmable thresholds for all three axes. The tap detection can be configured to run through the high-pass filter and also through a low-pass filter, which provides more customizing and tunable tap detection schemes. The status register provides updates on the axes where the event was detected and the direction of the tap. For more information on how to configure the device for tap detection please refer to Freescale application note, AN4072.
MMA8451Q
Sensors
MMA8451Q
Sensors
5.9Orientation Detection
The MMA8451Q incorporates an advanced algorithm for orientation detection (ability to detect all 6 orientations) with configurable trip points. The embedded algorithm allows the selection of the mid point with the desired hysteresis value.
The MMA8451Q Orientation Detection algorithm confirms the reliability of the function with a configurable Z-lockout angle. Based on known functionality of linear accelerometers, it is not possible to rotate the device about the Z-axis to detect change in acceleration at slow angular speeds. The angle at which the device no longer detects the orientation change is referred to as the “Z-Lockout angle”. The device operates down to 14° from the flat position.
For further information on the configuration settings of the orientation detection function, including recommendations for configuring the device to support various application use cases, refer to Freescale application note, AN4068.
Figure 8 shows the definitions of the trip angles going from Landscape to Portrait (A) and then also from Portrait to Landscape (B).
Figure 7. Landscape/Portrait Orientation
Figure 8. Illustration of Landscape to Portrait Transition (A) and Portrait to Landscape Transition (B)
Top View
PU
Earth Gravity
Pin 1
Xout @ 0g Yout @ -1g Zout @ 0g
Xout @ 1g Yout @ 0g Zout @ 0g
Yout @ 1g Zout @ 0g
Xout @ -1g Yout @ 0g Zout @ 0g
LL
PD
LR
Side View
FRONT
Xout @ 0g Yout @ 0g Zout @ 1g
BACK
Xout @ 0g Yout @ 0g
Zout @ -1g PORTRAIT 90°0° Landscape PORTRAIT 90°
0° Landscape
MMA8451Q Sensors
Figure 9 illustrates the Z-angle lockout region. When lifting the device upright from the flat position it will be active for
orientation detection as low as14° from flat. This is user configurable. The default angle is 29° but it can be set as low as 14°.
.
Figure 9. Illustration of Z-Tilt Angle Lockout Transition
5.10Interrupt Register Configurations
There are seven configurable interrupts in the MMA8451Q: Data Ready , Motion/Freefall, T ap (Pulse), Orientation, Transient, FIFO and Auto-SLEEP events. These seven interrupt sources can be routed to one of two interrupt pins. The interrupt source must be enabled and configured. If the event flag is asserted because the event condition is detected, the corresponding interrupt pin, INT1 or INT2, will assert.
Figure 10. System Interrupt Generation Block Diagram
5.11
Serial I 2C Interface
Acceleration data may be accessed through an I 2C interface thus making the device particularly suitable for direct interfacing with a microcontroller. The MMA8451Q features an interrupt signal which indicates when a new set of measured acceleration data is available thus simplifying data synchronization in the digital system that uses the device. The MMA8451Q may also be configured to generate other interrupt signals accordingly to the programmable embedded functions of the device for Motion, Freefall, Transient, Orientation, and T ap.The registers embedded inside the MMA8451Q are accessed through the I 2C serial interface (Table 9). To enable the I 2C
interface, VDDIO line must be tied high (i.e., to the interface supply voltage). If VDD is not present and VDDIO is present, the
UPRIGHT 90°
0° FLAT
INTERRUPT CONTROLLER
Data Ready Motion/Freefall
Tap (Pulse)Orientation Transient FIFO Auto-SLEEP
INT ENABLE
INT CFG
INT1
INT2
7
7
MMA8451Q is in off mode and communications on the I2C interface are ignored. The I2C interface may be used for communications between other I2C devices and the MMA8451Q does not affect the I2C bus.
Table9. Serial Interface Pin Description
Pin Name Pin Description
SCL I2C Serial Clock
SDA I2C Serial Data
SA0I2C least significant bit of the device address
There are two signals associated with the I2C bus; the Serial Clock Line (SCL) and the Serial Data line (SDA). The latter is a bidirectional line used for sending and receiving the data to/from the interface. External pullup resistors connected to VDDIO are expected for SDA and SCL. When the bus is free both the lines are high. The I2C interface is compliant with Fast mode (400 kHz), and Normal mode (100 kHz) I2C standards (Table4).
5.11.1I2C Operation
The transaction on the bus is started through a start condition (ST ART) signal. ST ART condition is defined as a HIGH to LOW transition on the data line while the SCL line is held HIGH. After ST ART has been transmitted by the Master, the bus is considered busy. The next byte of data transmitted after ST ART contains the slave address in the first 7 bits, and the eighth bit tells whether the Master is receiving data from the slave or transmitting data to the slave. When an address is sent, each device in the system compares the first seven bits after a start condition with its address. If they match, the device considers itself addressed by the Master. The 9th clock pulse, following the slave address byte (and each subsequent byte) is the acknowledge (ACK). The transmitter must release the SDA line during the ACK period. The receiver must then pull the data line low so that it remains stable low during the high period of the acknowledge clock period.
A LOW to HIGH transition on the SDA line while the SCL line is high is defined as a stop condition (STOP). A data transfer is always terminated by a STOP. A Master may also issue a repeated ST ART during a data transfer. The MMA8451Q expects repeated ST ART s to be used to randomly read from specific registers.
The MMA8451Q's standard slave address is a choice between the two sequential addresses 0011100 and 0011101. The selection is made by the high and low logic level of the SA0 (pin 7) input respectively. The slave addresses are factory programmed and alternate addresses are available at customer request. The format is shown in Table10.
Table10. I2C Address Selection Table
Slave Address (SA0 = 0)Slave Address (SA0 = 1)Comment 0011100 (0x1C)0011101 (0x1D)Factory Default
Single Byte Read
The MMA8451Q has an internal ADC that can sample, convert and return sensor data on request. The transmission of an 8-bit command begins on the falling edge of SCL. After the eight clock cycles are used to send the command, note that the data returned is sent with the MSB first once the data is received. Figure 11shows the timing diagram for the accelerometer 8-bit I2C read operation. The Master (or MCU) transmits a start condition (ST) to the MMA8451Q, slave address ($1D), with the R/W bit set to “0” for a write, and the MMA8451Q sends an acknowledgement. Then the Master (or MCU) transmits the address of the register to read and the MMA8451Q sends an acknowledgement. The Master (or MCU) transmits a repeated start condition (SR) and then addresses the MMA8451Q ($1D) with the R/W bit set to “1” for a read from the previously selected register. The Slave then acknowledges and transmits the data from the requested register. The Master does not acknowledge (NAK) the transmitted data, but transmits a stop condition to end the data transfer.
Multiple Byte Read
When performing a multi-byte read or “burst read”, the MMA8451Q automatically increments the received register address commands after a read command is received. Therefore, after following the steps of a single byte read, multiple bytes of data can be read from sequential registers after each MMA8451Q acknowledgment (AK) is received until a no acknowledge (NAK) occurs from the Master followed by a stop condition (SP) signaling an end of transmission.
Single Byte Write
T o start a write command, the Master transmits a start condition (ST) to the MMA8451Q, slave address ($1D) with the R/W bit set to “0” for a write, the MMA8451Q sends an acknowledgement. Then the Master (MCU) transmits the address of the register to write to, and the MMA8451Q sends an acknowledgement. Then the Master (or MCU) transmits the 8-bit data to write to the designated register and the MMA8451Q sends an acknowledgement that it has received the data. Since this transmission is
MMA8451Q Sensors
MMA8451Q Sensors
complete, the Master transmits a stop condition (SP) to the data transfer. The data sent to the MMA8451Q is now stored in the appropriate register.
Multiple Byte Write
The MMA8451Q automatically increments the received register address commands after a write command is received.
Therefore, after following the steps of a single byte write, multiple bytes of data can be written to sequential registers after each MMA8451Q acknowledgment (ACK) is received.
Figure 11. I 2C Timing Diagram
Table 11. I 2C Device Address Sequence
Command [6:1]
Device Address
[0]SA0[6:0]
Device Address
R/W 8-bit Final Value
Read 00111000x1C 10x39Write 00111000x1C 00x38Read 00111010x1D 10x3B Write
001110
1
0x1D
0x3A
< Single Byte Read >Master
ST
Device Address[6:0]
W
Register Address[7:0]
SR
Device Address[6:0]
R
NAK SP
Slave
AK AK AK Data[7:0]
< Multiple Byte Read >Master
ST
Device Address[6:0]
W
Register Address[7:0]
SR Device Address[6:0]
R
AK
Slave AK AK AK Data[7:0]
Master
AK AK NAK SP
Slave
Data[7:0]Data[7:0]Data[7:0]
< Single Byte Write >Master
ST
Device Address[6:0]
W
Register Address[7:0]
Data[7:0]
SP
Slave AK AK AK
< Multiple Byte Write >Master
ST
Device Address[6:0]
W
Register Address[7:0]
Data[7:0]
Data[7:0]
SP
Slave AK AK AK AK
Legend
ST: Start Condition
SP: Stop Condition NAK: No Acknowledge W: Write = 0
SR: Repeated Start Condition
AK: Acknowledge
R: Read = 1
MMA8451Q
Sensors
6Register Descriptions
Table 12. Register Address Map
Name
Type
Register
Address Auto-Increment Address
Default
Hex Value
Comment
FMODE = 0F_READ = 0FMODE > 0F_READ = 0FMODE = 0F_READ = 1FMODE > 0
F_READ = 1
STATUS/F_STATUS (1)(2)
R 0x000x010********x00
FMODE = 0, real time status FMODE > 0, FIFO status OUT_X_MSB (1)(2)R 0x010x020x010x030x01Output —
[7:0] are 8 MSBs of 14-bit sample.Root pointer to XYZ FIFO data.OUT_X_LSB (1)(2)R 0x020x030x00Output —
[7:2] are 6 LSBs of 14-bit real-time
sample OUT_Y_MSB (1)(2)R 0x030x040x050x00Output —
[7:0] are 8 MSBs of 14-bit real-time
sample OUT_Y_LSB (1)(2)R 0x040x050x00Output —
[7:2] are 6 LSBs of 14-bit real-time
sample OUT_Z_MSB (1)(2)R 0x050x060x00Output —
[7:0] are 8 MSBs of 14-bit real-time
sample OUT_Z_LSB (1)(2)
R 0x060x00
Output —[7:2] are 6 LSBs of 14-bit real-time
sample Reserved R 0x07——————Reserved. Read return 0x00.Reserved R 0x08—
—
—
—
——Reserved. Read return 0x00.
F_SETUP (1)(3)R/W 0x090x0A 000000000x00FIFO setup
TRIG_CFG (1)(4)R/W 0x0A 0x0B 000000000x00Map of FIFO data capture events
SYSMOD (1)(2)R 0x0B 0x0C 000000000x00Current System Mode
INT_SOURCE (1)(2)R 0x0C 0x0D 000000000x00Interrupt status WHO_AM_I (1)R 0x0D 0x0E 000110100x1A Device ID (0x1A)XYZ_DATA_CFG (1)(4)R/W 0x0E 0x0F 000000000x00Dynamic Range Settings HP_FILTER_CUTOFF (1)(4)
R/W
0x0F
0x10
00000000
0x00
Cutoff frequency is set to 16Hz @
800Hz PL_STATUS (1)(2)R 0x100x11000000000x00Landscape/Portrait orientation
status PL_CFG (1)(4)R/W 0x110x12100000000x80Landscape/Portrait configuration.PL_COUNT (1)(3)R/W 0x120x130********x00Landscape/Portrait debounce
counter PL_BF_ZCOMP (1)(4)R/W 0x130x14010001000x44Back/Front, Z-Lock Trip threshold P_L_THS_REG (1)(4)R/W
0x14
0x15
10000100
0x84
Portrait to Landscape Trip Angle is
29°FF_MT_CFG (1)(4)R/W 0x150x16000000000x00
Freefall/Motion functional block
configuration FF_MT_SRC (1)(2)R 0x160x17000000000x00Freefall/Motion event source
register FF_MT_THS (1)(3)R/W 0x170x180********x00Freefall/Motion threshold register FF_MT_COUNT (1)(3)
R/W 0x180x19
00000000
0x00Freefall/Motion debounce counter Reserved R 0x19——————Reserved. Read return 0x00.Reserved R 0x1A ——————Reserved. Read return 0x00.Reserved R 0x1B ——————Reserved. Read return 0x00.Reserved
R 0x1C —
—
—
—
——Reserved. Read return 0x00.TRANSIENT_CFG (1)(4)R/W 0x1D 0x1E 000000000x00Transient functional block
configuration TRANSIENT_SCR (1)(2)
R
0x1E
0x1F
00000000
0x00
Transient event status register
MMA8451Q Sensors
Note :Auto-increment addresses which are not a simple increment are highlighted in bold . The auto-increment addressing is only enabled when
device registers are read using I 2C burst read mode. Therefore the internal storage of the auto-increment address is cleared whenever a stop-bit is detected.
6.1Data Registers
The following are the data registers for the MMA8451Q. For more information on data manipulation of the MMA8451Q, refer to application note, AN4076.
When the F_MODE bits found in Register 0x09 (F_SETUP), bits 7 and 6 are both cleared (the FIFO is not on). Register 0x00 reflects the real-time status information of the X, Y and Z sample data. When the F_MODE value is greater than zero the FIFO is on (in either Fill, Circular or Trigger mode). In this case Register 0x00 will reflect the status of the FIFO. It is expected when the FIFO is on that the user will access the data from Register 0x01 (X_MSB) for either the 14-bit or 8-bit data. When accessing the 8-bit data the F_READ bit (Register 0x2A) is set which modifies the auto-incrementing to skip over the LSB data. When F_READ bit is cleared the 14-bit data is read accessing all 6 bytes sequentially (X_MSB, X_LSB, Y_MSB, Y_LSB, Z_MSB, Z_LSB).
TRANSIENT_THS (1)(3)R/W 0x1F 0x20000000000x00Transient event threshold TRANSIENT_COUNT (1)(3)
R/W 0x200x21000000000x00Transient debounce counter PULSE_CFG (1)(4)R/W 0x210x22000000000x00ELE, Double_XYZ or Single_XYZ PULSE_SRC (1)(2)R 0x220x23000000000x00EA, Double_XYZ or Single_XYZ
PULSE_THSX (1)(3)R/W 0x230x24000000000x00X pulse threshold PULSE_THSY (1)(3)R/W 0x240x25000000000x00Y pulse threshold PULSE_THSZ (1)(4)R/W 0x250x26000000000x00Z pulse threshold PULSE_TMLT (1)(4)R/W 0x260x27000000000x00Time limit for pulse PULSE_LTCY (1)(4)R/W 0x270x28000000000x00Latency time for 2nd pulse PULSE_WIND (1)(4)R/W 0x280x29000000000x00Window time for 2nd pulse ASLP_COUNT (1)(4)R/W 0x290x2A 000000000x00Counter setting for Auto-SLEEP CTRL_REG1(1)(4)R/W 0x2A 0x2B 000000000x00ODR = 800 Hz, STANDBY Mode.
CTRL_REG2(1)(4)R/W 0x2B 0x2C 000000000x00Sleep Enable, OS Modes,
RST, ST CTRL_REG3(1)(4)R/W 0x2C 0x2D 000000000x00Wake from Sleep, IPOL, PP_OD
CTRL_REG4(1)(4)R/W 0x2D 0x2E 000000000x00Interrupt enable register CTRL_REG5(1)(4)
R/W 0x2E 0x2F 000000000x00Interrupt pin (INT1/INT2) map
OFF_X (1)(4)R/W 0x2F 0x30000000000x00X-axis offset adjust OFF_Y (1)(4)R/W 0x300x31000000000x00Y-axis offset adjust OFF_Z (1)(4)
R/W
0x310x0D 00000000
0x00Z-axis offset adjust Reserved (do not modify)
0x40 – 7F
—
—
—
Reserved. Read return 0x00.
1.Register contents are preserved when transition from ACTIVE to STANDBY mode occurs.
2.Register contents are reset when transition from STANDBY to ACTIVE mode occurs.
3.Register contents can be modified anytime in STANDBY or ACTIVE mode. A write to this register will cause a reset of the corresponding internal system debounce counter.
4.Modification of this register’s contents can only occur when device is STANDBY mode except CTRL_REG1 ACTIVE bit and CTRL_REG2 RST bit. F_MODE = 00: 0x00 STATUS: Data Status Register (Read Only)
Bit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0ZYXOW
ZOW
YOW
XOW
ZYXDR
ZDR
YDR
XDR
Table 12. Register Address Map
角的比较和运算典型题 例1 如图:∠AOB是哪两个角的和?∠DOC是哪两个角的和?若∠AOB=∠COD,则还有哪两个角相等? (独立完成,个别回答,教师点评) 例2 如图: AOB是一条直线,∠AOC=900,∠DOE=900, 写出∠AOD、∠COD、∠AOC、∠AOB、∠BOD中某些角 之间的两个等量关系。 (小组讨论,代表发言,学生点评) 例 3 已知:一条射线OA,若从点O再引两条射线OB、OC,使∠AOB=600,∠BOC=200,求∠AOC的度数? 如图所示,如果∠AOB=∠BOC,则∠AOC= ∠AOB +∠BOC=2∠AOB =2∠BOC,即∠AOB=∠BOC=1/2∠AOC 如这种从一个角的顶点出发,把这个角分成相等的两角的射线,叫做这个角的平分线,类似地还有角的三等分线等。 例4 如图:已知O为直线AB上一点,∠AOC的平分线OM,∠BOC的平分线为ON,求∠MON的度数? 例5 如图所示,OM为∠AOB的平分线,射线OC在∠BOM 内,ON为∠BOC的平分线,已知∠AOC=800,求∠MON? 练习:1、如图所示:(1)∠COD= - ,或 - 。 (2)如果∠AOB=∠COD,则∠AOC与∠BOD的大小关系如何?
2、如图所示:∠1:∠2:∠3:∠4=1:2:3:4,求∠1、∠2、∠ 3、∠4的度数? 3、已知一条直线OA,若从点O再引两条射线OB和OC,使角AOB为60度,角BOC为20度,求角AOC的度数。 4、如图,已知:∠BOC=2∠AOB,OD平分∠AOC,∠BOD=140求:∠AOB的度数。 5.如图,OB是∠AOC的平分线,OD是∠COE的平分线。 (1)若∠AOC=800 ,求∠BOC的度数; (2)若∠AOC=800 ,∠COE=500,求∠BOD的度数。 E D C B O A (3).若∠AOB=390,∠BOC=210,则∠AOC的度数是多少?为什么? 提高训练 一、填空: 1.如图1,∠AOB______∠AOC,∠AOB_______∠BOC(填>,=,<); O C (1) A B O D C (2) A B O D C (3) A B 2.如图2,∠AOC=______+______=______-______;∠BOC=______-______= _____-________. 3.OC是∠AOB内部的一条射线,若∠AOC= 1 2 ________,则OC平分∠AOB;若OC 是∠AOB 的角平分线,则_________=2∠AOC. 二、选择: 4.下列说法错误的是( ) A.角的大小与角的边画出部分的长短没有关系; B.角的大小与它们的度数大小是一致的; C.角的和差倍分的度数等于它们的度数的和差倍分; D.若∠A+∠B>∠C,那么∠A一定大于∠C。 5.用一副三角板不能画出( ) A.75°角 B.135°角 C.160°角 D.105°角 6.如图3,若∠AOC=∠BOD,那么∠AOD与∠BOC的关系是( ) A.∠AOD>∠BOC B.∠AOD<∠BOC; C.∠AOD=∠BOC D.无法确定 7.如果∠1-∠2=∠3,且∠4+∠2=∠1,那么∠3和∠4间的关系是( ) A.∠3>∠4 B.∠3=∠4; C.∠3<∠4 D.不确定
第二节应纳税所得额的计算 三、扣除原则和范围(掌握,能力等级3) 14.有关资产的费用 (1)企业转让各类固定资产发生的费用:允许扣除; (2)企业按规定计算的固定资产折旧费、无形资产和递延资产的摊销费:准予扣除。 15.总机构分摊的费用 非居民企业在中国境内设立的机构、场所,就其中国境外总机构发生的与该机构、场所生产经营有关的费用,能够提供总机构出具的费用汇集范围、定额、分配依据和方法等证明文件,并合理分摊的,准予扣除。 16.资产损失 (1)企业当期发生的固定资产和流动资产盘亏、毁损净损失,由其提供清查盘存资料经主管税务机关审核后,准予扣除; (2)企业因资产盘亏、毁损、报废等原因不得从销项税金中抵扣的进项税金,应视同企业资产损失,准予与资产损失—起在所得税前按规定扣除。 【例题·计算问答题】某企业(增值税一般纳税人)2014年毁损一批库存材料,账面成本10120元(含运费120元),保险公司审理后同意赔付8000元,该企业的损失已向税务机关进行了专项申报,其在所得税前可扣除的损失金额为多少。 【答案及解析】不得抵扣的进项税额=(10120-120)×17%+120×11%=1700+13.2=1713.2(元) 在所得税前可扣除的损失金额为:10120+1713.2-8000=3833.2(元)。 17.其他项目 如会员费、合理的会议费、差旅费、违约金、诉讼费用等,准予扣除。 【例题·多选题】下列支出中,在符合真实性原则的前提下,可以从应纳税所得额中直接据实扣除的有()。 A.违约金 B.诉讼费用 C.提取未支付的职工工资 D.实际发生的业务招待费 【答案】AB 18.手续费及佣金支出(P274) 【解释】对于与生产经营有关的手续费、佣金支出有五个方面的限制: 第一,手续费、佣金有支付对象的限制——不能是交易双方人员(含代理人、代表人)。手续费、佣金的支付对象应该是具有合法经营资格的中介服务企业或个人。 第二,手续费及佣金支出有计算基数和开支比例限制。 ①对于保险企业,财产保险企业按当年全部保费收入扣除退保金等后余额的15%(含本数,下同)计算限额;人身保险企业按当年全部保费收入扣除退保金等后余额的10%计算限额。 ②对于其他企业,按与具有合法经营资格中介服务机构或个人(不含交易双方及其雇员、代理人和代表人等)所签订服务协议或合同确认的收入金额的5%计算限额。 ③电信企业在发展客户、拓展业务等过程中(如委托销售电话入网卡、电话充值卡等),需向经纪人、代办商支付手续费及佣金的,其实际发生的相关手续费及佣金支出,不超过企业当年收入总额5%的部分,准予在企业所得税前据实扣除。(注意:比例是5%,但是计算限额的基数是年收入总额) ④从事代理服务、主营业务收入为手续费、佣金的企业(如证券、期货、保险代理等企业),其为取得该类收入而实际发生的营业成本(包括手续费及佣金支出),准予在企业所得税前据实扣除。(注意:无比例限制)第三,手续费及佣金支出既不能变换名目计入回扣、业务提成、返利、进场费等费用;也不能坐冲收入。 第四,手续费和佣金有支付方式限制。 除委托个人代理外,企业以现金等非转账方式支付的手续费及佣金不得在税前扣除。 第五,企业为发行权益性证券支付给有关证券承销机构的手续费及佣金不得在税前扣除。 【例题·单选题】下列符合企业所得税佣金扣除规定,可以在所得税前扣除的佣金是()。 A.甲企业销售给乙企业1000万元货物,签订合同并收取款项后,甲企业支付乙企业采购科长40万元 B.甲企业委托丁中介公司介绍客户,成功与丁介绍的客户完成交易,交易合同表明交易金额300万元,甲企
初中数学角度计算中11个经典模型(56页wo rd) 模型1猪脚模型 图1 图2 【条件】如图1 【结论】∠3=∠1+∠2 【证明】如图2,过拐点作平行线 ∠1=∠4,∠5=∠2 ∠3=∠4+∠5=∠1+∠2 即∠3=∠1+∠2 例题1 如图,∠BCD=70°,AB∥DE,则∠α与∠β满足() A.∠α+∠β=110°B.∠α+∠β=70°C.∠β﹣∠α=70°D.∠α+∠β=90° 【分析】过点C作CF∥AB,根据平行线的性质得到∠BCF=∠α,∠DCF=∠β,即可解答.【解析】如图,过点C作CF∥AB, ∵AB∥DE,∴AB∥CF∥DE,∴∠BCF=∠α,∠DCF=∠β, ∵∠BCD=70°,∴∠BCD =∠BCF+∠DCF=∠α+∠β=70°,∴∠α+∠β=70°.故选B.【小结】考查平行线性质,正确作出辅助线,掌握平行线的性质进行推理证明是解题关键.
变式1 如图,AB //EF ,∠D =90° ,则α,β,γ的大小关系是( ) A .βαγ=+ B .90βαγ=+-? C .90βγα=+?- D .90βαγ=+?- 【解析】如图,过点C 和点D 作CG //AB ,DH //AB , ∵CG //AB ,DH //AB ,∴CG //DH //AB ,∵AB //EF ,∴AB //EF //CG //DH , ∵CG //AB ,∴∠BCG =α,∴∠GCD =∠BCD -∠BCG =β-α,∵CG //DH ,∴∠CDH =∠GCD =β-α, ∵HD //EF ,∴∠HDE =γ,∵∠EDC =∠HDE +∠CDH =90°,∴γ+β-α=90°,∴β=α+90°-γ.故选:D . 模型2 铅笔模型 图1 图2 【条件】如图1 【结论】∠1+∠2+∠3=360° 【证明】如图2,过拐点作平行线 根据同旁内角互补得,∠1+∠4=180°,∠2+∠5=180° 又∠3=∠4+∠5 所以∠1+∠2+∠3=∠1+∠2+∠4+∠5=360° 【推广】∠1+∠2+∠3+…+∠n = 180°(n -1)【即变异铅笔模型】
1 三角形中相关角度的计算规律及应用 淮南市谢家集区杨公中学 夏明海 三角形是最简单的多边形,初中几何教学中常通过对角线或添加辅助线把复杂的图形转化为三角形来研究和讨论,使问题简化后得以解决,可见三角形是初中几何的最基础的内容,在几何教学中尤显重要。三角形内角和定理与角平分线、高线是探索和研究三角形问题的重要知识点。在教学实践中把他们巧妙的结合起来,使得解决问题更为方便。 以素质教育为标准的新课标,对教材内容的深度、广度和难度都做了适当的调整,目前形势下,众多的教辅材料进入了学生的书包。其深度和难度明显超出了新课标的要求,如果学生不能很好的灵活应用基础知识,是很难完成作业的。为此对教师的课堂教学提出了新的要求。除要使学生对基础内容理解和掌握外,还要求教师把基本知识进行升华,教会学生准确、灵活的运用所学知识解决相应问题,同时要把基本内容进行归纳总结,抽象出规律性的东西。同时也培养了学生的综合分析能力和逻辑思维能力。 由于我在课堂教学中摸索出点滴的教学经验——三角形中相关角度的计算规律及其应用。愿和同行们进行交流,共同分享这份快乐,共同进步。 一、三角形内角和定理与角平分线规律及应用 例1:在△ABC 中,BO 与CO 分别是∠ABC 和∠ACB 的平分线,且相交于点O ,探究∠O 与∠A 是否有关系?若有关系,试分析有怎样的关系? 研究分析:∠O =180°- (∠1+∠2) 而∠1+∠2= 1 2 (180°-∠A) =90°- 1 2 ∠A ∴∠O=180°- (90°- 1 2 ∠A) =90°+ 1 2 ∠A 由例1总结出规律:三角形的两个内角平分线交 于一点,所形成角的度数等于90°加上第三角的一半,即为∠O = 90°+ 1 2 ∠A 。 例2:已知如图:在△ABC 中,BO 、CO 分别平分∠CBE 和∠BCF ,且交于点O ,则∠O 与 ∠A 的关系又如何呢? 分析:∠O = 180°-(∠1+∠2) 而∠1+∠2 = 1 2 (180°+ ∠A) ∴∠O =180°- [ 1 2 (180°+ ∠A)] = 180°- 90°- 1 2 ∠A = 90°- 1 2 ∠A B A O C 1 2 例1 E F
4-1-3.角度计算 知识点拨 一、角 1、角的定义:自一点引两条射线所成的图形叫角 2、表示角的符号:∠ 3、角的分类:锐角、直角、钝角、平角、周角、负角、正角、优角、劣角、0角这10种 (1)锐角:大于0°,小于90°的角叫做锐角。 (2)直角:等于90°的角叫做直角。 (3)钝角:大于90°而小于180°的角叫做钝角。 (4)平角:等于180°的角叫做平角。 (5)优角:大于180°小于360°叫优角。 (6)劣角:大于0°小于180°叫做劣角,锐角、直角、钝角都是劣角。 (7)周角:等于360°的角叫做周角。 (8)负角:按照顺时针方向旋转而成的角叫做负角。 (9)正角:逆时针旋转的角为正角。 (10)0角:等于零度的角。 4、角的大小:角的大小与边的长短没有关系;角的大小决定于角的两条边张开的程度,张开的越大, 角就越大,相反,张开的越小,角则越小。 二、三角形 1、三角形的定义:由三条边首尾相接组成的封闭图形叫做三角形 2、内角和:三角形的内角和为180度; 外角:(1)三角形的一个外角等于另外两个内角的和; (2)三角形的一个外角大于其他两内角的任一个角。 3、三角形的分类 (1)按角分:锐角三角形:三个角都小于90度。 直角三角形:有一个角等于90度。 钝角三角形:有一个角大于90度。 注:锐角三角形和钝角三角形可统称为斜三角形 (2)按边分:不等腰三角形;等腰三角形(含等边三角形)。 模块一、角度计算 【例 1】有下列说法: (1)一个钝角减去一个直角,得到的角一定是锐角, (2)一个钝角减去一个锐姥,得到的角不可能还是钝角. (3)三角形的三个内麓中至多有一个钝角.
角度计算中的经典模型【举一反三】 【模型1 双垂直模型】 【条件】∠B=∠D=∠ACE=90°. 【结论】∠BAC=∠DCE,∠ACB=∠CED. 【例1】(2019春?润州区校级月考)如图,在△ABC中,∠ACB=90°,F是AC延长线上一点,FD⊥AB,垂足为D,FD与BC相交于点E,∠BED=55°.求∠A的度数. 【变式1-1】(2019秋?凉州区校级期中)如图,△ABC中,∠B=∠C,FD⊥BC,DE⊥AB,∠AFD=152°,
求∠A的度数. 【变式1-2】(2019春?莲湖区期中)如图,在△ACB中,∠ACB=90゜,CD⊥AB于D. (1)求证:∠ACD=∠B; (2)若AF平分∠CAB分别交CD、BC于E、F,求证:∠CEF=∠CFE. 【变式1-3】(1)如图①,在Rt△ABC中,∠ACB=90°,CD⊥AB,垂足为D,∠ACD与∠B有什么关系?为什么? (2)如图②,在Rt△ABC中,∠C=90°,D、E分别在AC,AB上,且∠ADE=∠B,判断△ADE的形状是什么?为什么? (3)如图③,在Rt△ABC和Rt△DBE中,∠C=90°,∠E=90°,AB⊥BD,点C,B,E在同一直线上,∠A与∠D有什么关系?为什么? 【模型2 A字模型】
【结论】∠BDE+∠CED=180°+∠A 【例2】(2019春?资中县月考)如图所示,△ABC中,∠C=75°,若沿图中虚线截去∠C,则∠1+∠2等于多少度? 【变式2-1】(2019春?长沙县校级期中)如图,已知∠A=40°,求∠1+∠2+∠3+∠4的度数. 【变式2-2】(2019春?盱眙县期中)我们容易证明,三角形的一个外角等于它不相邻的两个内角的和,那么,三角形的一个内角与它不相邻的两个外角的和之间存在怎样的数量关系呢? Ⅰ.尝试探究: (1)如图1,∠DBC与∠ECB分别为△ABC的两个外角,试探究∠A与∠DBC+∠ECB之间存在怎样的数量关系?为什么?
角度计算中的动态问题1——射线的旋转 【导学提示】1.结合线段中的动点和动线段问题进行思考,类比的方法学习角的动态问题。 2.注意角的内部外部变化所带来的分类讨论问题。 例1. 如图1,∠AOB =120°,射线OP 以1°/秒的速度从OA 出发,射线OQ 以2°秒的速度从OB 出发,两条射线同时开始逆时针转动t 秒. (1)当t =10秒时,求∠POQ 的度数. (2)如图2,在射线OQ 、OP 转动过程中,射线OE 始终在∠BOQ 内部,且OF 平分∠AOP ,若∠EOF =120°不变,求EOQ BOE ∠∠的值. 练习1.(本题12分)(1) 已知:在∠AOB 内作射线OD 、OC 、OE ,如图1,∠AOB 是一个直角,任作射线OC ,再分别作∠AOC 和∠BOC 的平分线OD 、OE ,求∠DOE 的度数 (2) 已知:在∠AOB 内作射线OD 、OC 、OE 、OF ,如图2,∠AOB =140°,∠COD =16°,OE 平分∠BOD ,OF 平分∠AOC .当∠COD 绕点O 在∠AOB 内旋转时,求∠EOF 的大小 (3) 已知:∠AOB 是一个直角(如图3),作射线OC ,再分别作∠AOC 和∠BOC 的平分线OD 、OE .当射线OC 在∠AOB 外绕点O 旋转时,请直接写出∠DOE 的大小 练习3.(本题12分)已知∠AOB=150°,OC 为∠AOB 内部的一条射线,∠BOC=60°。 图2 图1 Q P O F E B A A B O P Q
(1)如图1,若OE 平分∠AOB,OD 为∠BOC 内部的一条射线,∠COD= 2 1 ∠BOD,求∠DOE 的度数; (2)如图2,若射线OE 绕着O 点从OA 开始以15度/秒的速度顺时针旋转至OB 结束、OF 绕着 O 点从OB 开始以5度秒的速度逆时针旋转至OA 结束,运动时间为t 秒,当∠EOC=∠FOC 时, 求t 的值: (3)若射线OM 绕着O 点从OA 开始以15度秒的速度逆时针旋转至OB 结束,在装转过程中,ON 平分∠AOM,试问2∠BON 一∠BOM 在某时间段内是否为定值,若不是,请说明理由;若是 请补全图形,求出这个定值并写出t 所在的时间段。(本题中的角均为大于0°且小于180°的角)
磁场综合训练(一) 1.弹性挡板围成边长为L = 100cm 的正方形abcd ,固定在光滑的水平面上,匀强磁场竖直向 下,磁感应强度为B = 0.5T ,如图所示. 质量为m =2×10-4kg 、带电量为q =4×10-3C 的小 球,从cd 边中点的小孔P 处以某一速度v 垂直于cd 边和磁场方向射入,以后小球与挡板 的碰撞过程中没有能量损失. (1)为使小球在最短的时间内从P 点垂直于dc 射出来,小球入射的速度v 1是多少? (2)若小球以v 2 = 1 m/s 的速度入射,则需经过多少时间才能由P 点出来? 2. 如图所示, 在区域足够大空间中充满磁感应强度大小为B 的匀强磁场,其方向垂直于纸面 向里.在纸面内固定放置一绝缘材料制成的边长为L 的等边三角形框架DEF , DE 中点S 处 有一粒子发射源,发射粒子的方向皆在图中截面内且垂直于DE 边向下,如图(a )所示. 发射粒子的电量为+q ,质量为m ,但速度v 有各种不同的数值.若这些粒子与三角形框架碰撞 时均无能量损失,并要求每一次碰撞时速度方向垂直于被碰的边.试求: (1)带电粒子的速度v 为多大时,能够打到E 点? (2)为使S 点发出的粒子最终又回到S 点,且运动时间最短,v 应为多大?最短时间为多少? (3)若磁场是半径为a 的圆柱形区域,如图(b )所示(图中圆为其横截面),圆柱的轴线 通过等边三角形的中心O ,且a =)10 1 33( L .要使S 点发出的粒子最终又回到S 点, 带电粒子速度v 的大小应取哪些数值? a b c d B P v L B v E S F D (a ) a O E S F D L v (b )
结构力学经典计算题 1. 对图 2.1a体系作几何组成分析。 图2.1 分析:图2.1a等效图2.1b(去掉二元体)。 对象:刚片Ⅰ、Ⅱ和Ⅲ; 联系:刚片Ⅰ、Ⅲ有虚铰A(杆、2);刚片Ⅱ、Ⅲ有虚铰C(无穷远)(杆3、4);刚片Ⅰ、Ⅱ有虚铰B(杆5、6); 结论:三铰共线,几何瞬变体系。 2. 对图2.2a体系作几何组成分析。 图2.1 分析:去掉二元体(杆12、杆34和杆56图2.1b),等效图2.1c。 对象:刚片Ⅰ和Ⅱ; 联系:三杆:7、8和9;
结论:三铰不共线,无多余约束的几何不变体系。 3. 对图2.3a体系作几何组成分析。 图2.3 分析:图2.3a 对象:刚片Ⅰ(三角形原则)和大地Ⅱ; 联系:铰A和杆1; 结论:无多余约束的几何不变体系。 对象:刚片Ⅲ(三角形原则)和大地Ⅱ; 联系:杆2、3和4; 结论:无多余约束的几何不变体系。
第3章静定结构的受力分析典型题1. 求图3.1结构的内力图。 图3.1 解(1)支座反力(单位:kN) 由整体平衡,得=100.= 66.67,=-66.67. (2)内力(单位:kN.m制) 取AD为脱离体: ,,; ,,。 取结点D为脱离体: ,, 取BE为脱离体:
,,。 取结点E为脱离体: ,, (3)内力图见图3.1b~d。 2. 判断图 3.2a和b桁架中的零杆。 图3.2 分析: 判断桁架零杆的常用方法是找出桁架中的L型结点和T型结点。如果这两种结点上无荷载作用.那么L型纪点的两杆及T型结点的非共线杆均为零杆。 解:图3.2a: 考察结点C、D、E、I、K、L,这些结点均为T型结点,且没有荷载作用,故杆件CG、DJ、EH、IJ、KH、LF 均为零杆。 考察结点G和H,这两个结点上的两竖向链杆均已判断为零杆,故这两个结点的受力也已成为T型结点的情形.由于没有荷载作用,故杆件AG、BH也为零杆。 整个结构共有8根零杆.如图3.2c虚线所示。 图3.2b:
七年级数学--角有关的计算问题 1、如图所示,AB 为一条直线,OC 是∠AOD 的平分线,OE 在∠BOD 内,∠DOE=3 1 ∠BOD ,∠COE=72°,求∠EOB 的度 数。 2、如图,已知∠AOB 是∠AOC 的余角,∠AOD 是∠AOC 的补角,且BOD BOC ∠= ∠2 1 求∠BOD 、∠AOC 的度数 3、一条射线OA ,若从点O 再引两条射线OB 、OC ,使∠AOB=60°,∠BOC=20°,求∠AOC 的度数。 4、已知∠AOB=100°,∠BOC=20°,若OM 平分∠AOB ,ON 平分∠BOC ,求∠MON 的度数。 5、已知,如图∠BOC 为∠AOC 内的一个锐角,射线OM 、ON 分别平分∠AOC 、∠BOC 。 (1)若∠AOB=90°,∠BOC=30°,求∠MON 的度数; (2)若∠AOB=α,∠BOC=30°,求∠MON 的度数; (3)若∠AOB=90°,∠BOC=β,还能否求 出∠MON 的度数?若 能,求出其值,若不能,说明理由。 (4)从前三问的结果你发现了什么规律? 6(2014?漳州)如图是一副学生用的三角形板摆放的位置,A 、O 、C 三点在同一直线上,则∠AOB 的度数是 度. B (第 13 题) A C O D O C B A
7、 点O 是直线AB 上一点,∠COD 是直角,OE 平分∠BOC 。 (1)如图1,若∠AOC=40°,求∠DOE 的度数; (2)在如1中,若∠AOC=α,直接写出∠DOE 的度数(用含α的代数式表示) 8如图,已知AB= 40,点C 是线段AB 的中点,点D 为线段CB 上的一点,点E 为线段DB 的中点,EB=6,求线段CD 的长。 A B C D E 9、如图,已知∠BOC =2∠AOC ,OD 平分∠AOB ,且∠COD =29°,求∠AOB 的度数。 10、如图,OB 平分∠AOC ,且∠2 : ∠3 : ∠4 = 1:3:4,求∠1、∠2、∠3、∠4。 11(如图,将一幅三角尺叠放在一起,使直角顶点重合于点O ,绕点O 任意转动其中一个三角尺,则与∠AOD 始终相等的角是 . C B A D O 3 D C B A 2 1 4 O
《圆中的角度计算》必考经典题型专项分类专题练习 题型一:垂径定理中的角度计算 1.如图,AB是☉O的直径,BC?=CD?=DE?,∠COD=34°,则∠AEO的度数是________. ?=AC?,∠A=30°,则∠B= ( ) 2.如图所示,在☉O中,AB A.150° B.75° C.60° D.15° 3.如图,在☉O中,直径AB∥弦CD,若∠COD=120°,则∠BOD=________°. ?=AC?,∠ACB=60°,求证:∠AOB=∠BOC=∠COA. 4.如图,在☉O中,AB
题型二:和圆周角、圆心角相关的角度计算 ?=AC?,∠AOB=40°,则∠ADC的度数是( ) 1.在☉O中,AB A.40° B.30° C.20° D.15° 2.如图,A,B,C是☉O上的三点,∠B=75°,则∠AOC的度数是( ) A.150° B.140° C.130° D.120° 3.如图,点A,B,C在☉O上,∠A=36°,∠C=28°,则∠B= 。 4.如图,已知经过原点的☉P与x,y轴分别交于A,B两点,点C是劣弧OB上一点,则∠ACB= 。
5.如图,已知AB=AC=AD,∠CBD=2∠BDC,∠BAC=44°,求∠CAD的度数。 题型三:和切线有关的角度计算 1.如图,AB是☉O的直径,AC切☉O于A,BC交☉O于点D,若∠C=70°,则∠AOD 的度数为( ) A.70° B.35° C.20° D.40° 2.在△ABC中,AB=AC,∠A为锐角,CD为AB边上的高,点I为△ACD的内切圆圆心,则∠AIB的度数是( ) A.120° B.125° C.135° D.150°
一、三角形内角和定理与角平分线规律及应用 例1:在△ABC 中,BO 与CO 分别是∠ABC 和∠ACB 的平分线,且相交于点O ,探究∠O 与∠A 是否有关系?若有关系,试分析有怎样的关系? 研究分析:∠O =180°- (∠1+∠2) 而∠1+∠2= 1 2 (180°-∠A) =90°- 1 2 ∠A ∴∠O=180°- (90°- 1 2 ∠A) =90°+ 1 2 ∠A 由例1总结出规律:三角形的两个内角平分线交 于一点,所形成角的度数等于90°加上第三角的一半, 即为∠O = 90°+ 1 2 ∠A 。 例 2:已知如图:在△ABC 中,BO 、CO 分别平分∠CBE 和∠BCF ,且交于点O ,则∠O 与 ∠A 的关系又如何呢? 分析:∠O = 180°-(∠1+∠2) 而∠1+∠2 = 1 2 (180°+ ∠A) ∴∠O =180°- [ 1 2 (180°+ ∠A)] = 180°- 90°- 1 2 ∠A = 90°- 1 2 ∠A 由例2总结出规律:三角形的两个外角平分线交于一点,所形成角的度数等于90°减去第三角的一半。即为∠O = 90°- 1 2 ∠A 。 例3:已知如图:PB 与PC 分别为内角∠ABC 和外角∠ACD 的平分线, 且交于点P , 探究:∠A 与∠P 的关系。 分析:∠P=∠2-∠1, ∠2= 1 2 (∠A+∠ABC) ∠1= 1 2 (180°-∠A - ∠BCA ) ∴∠P= 1 2 (∠A+∠ABC )- 1 2 (180°-∠A - ∠BCA ) = 1 2 ∠A + 1 2 ∠ABC - 90°+ 1 2 ∠A+ 1 2 ∠BCA =∠A - 90°- 1 2 (180°-∠A) = 1 2 ∠A 由例3总结出规律:三角形的一个内角平分线与一个外角平分线交于一点,所形成角的度数等于第三角的一半。即为∠P = 1 2 ∠A 。 规律的应用 B A O C 1 2 例1 E F
七年级数学--角有关的计算问题1、如图所示,AB为一条直线,OC是∠AOD的平分 线,OE在∠BOD内,∠DOE= 3 1∠BOD,∠COE=72°, 求∠EOB的度数。 2、如图,已知∠AOB是∠AOC的余角,∠AOD是∠AOC的补角,且BOD BOC∠ = ∠ 2 1 求∠BOD、∠AOC的度数 3、一条射线OA,若从点O再引两条射线OB、OC,使∠AOB=60°,∠BOC=20°,求∠AOC的度数。 4、已知∠AOB=100°,∠BOC=20°,若OM平分∠AOB,ON平分∠BOC,求∠MON 的度数。 5、已知,如图∠BOC为∠AOC内的一个锐角,射线OM、ON分别平分∠AOC、∠BOC。 (1)若∠AOB=90°,∠BOC=30°,求∠MON的度数; (2)若∠AOB=α,∠BOC=30°,求∠MON的度数; (3)若∠AOB=90°,∠BOC=β,还能否求出∠MON的度数若能,求出其值,若不能,说明理由。 (4)从前三问的结果你发现了什么规律 D O C B A
6(2014?漳州)如图是一副学生用的三角形板摆放的位置,A 、O 、C 三点在同一直线上,则∠AOB 的度数是 度. B (第 13 题) A C O 7、点O 是直线AB 上一点,∠COD 是直角,OE 平分∠BOC 。 (1)如图1,若∠AOC=40°,求∠DOE 的度数; (2)在如1中,若∠AOC=α,直接写出∠DOE 的度数(用含α的代数式表示) 8如图,已知AB= 40,点C 是线段AB 的中点,点D 为线段CB 上的一点,点E 为线段DB 的中点,EB=6,求线段CD 的长。 A B C D E
时针中的角度计算技巧 刘镇中学王欢 带有指针的钟表是生活中常用的工具之一,钟面上的时针、分针每时每刻都在忙碌地工作着。其实,这看似平常的钟面上蕴藏着大量的数学知识,时针、分针转动过程中所夹的角度问题就是其中之一。 众所周知,在钟面上分针每分钟转动一小格(共60小格),时针每小时转动一大格(12大格),所以在钟面上同一指针每转动一大格的夹角为30°,每转动一小格的夹角为6°,所以分针每分钟转动6°,时针每分钟转动0.5°。 例1 从8时25分到8时53分,时针与分针各转动了多少度? 解析:因为8时25分到8时53分,分针走了28分钟,所以分针转动的角度为6°×28=168°。同理,时针也走了28分钟,所以时针转动的角度为0.5°×28=14°。 此题属于不同时刻同一指针(分针或时针)转动角度的计算题,因此可直接用分针和时针每分钟各自转动的角度乘以转动的时间。 例2 在9时20分时,时针与分针的夹角是多少度? 解析1:把0时(12时)看成起点,那么到9时20分时,时针转动了0.5°×(60×9+20)=280°;由于分针每转动360°都与0°重合,使得最后显示在钟面上的分针与起点相比转动了6°×20=120°,所以分针与时针的夹角为280°-120°=160° 点评:本例属于同一时刻,不同指针(分针与时针)夹角的计算问题。解决此类问题应分别求出时针、分针从钟面0时(12时)到某一时刻所转动的角度,再求出这两个角度的差的绝对值,即为所求时刻两指针夹角的度数。此类问题可以推广为:在n时m分时,时针与分针的夹角的度数为︱10.5(60n+m)-6m︱°=︱30 n-5.5m︱° 解析2:先来出时针和分针所构成的图形(如图),从图中可以看出,它们 20 的夹角为5×30°+ ×30°=160° 60