PID与模糊PID控制的概述
【摘要】本文介绍了PID控制器、模糊整定PID控制原理及其在MATLAB中的具体实现法,并进行了MATLAB仿真,直观地对比出专家PID和模糊PID控制器的动态性能以及之间的关系。
【关键字】专家PID控制模糊PID控制matlab仿真
一、概述
它用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp,Ti和Td)即可。在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是必不可少的。
首先,PID应用范围广。虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了。
其次,PID参数较易整定,即整定PID控制器,参数Kp,Ti和Td可以根据过程的动态特性及时整定。
现在,自动整定或自身整定的PID控制器已是商业单回路控制器和分散控制系统的一个标准。
在一些情况下针对特定的系统设计的PID控制器控制得很好,但它们仍存在一些问题需要解决:
如果自整定要以模型为基础,为了PID参数的重新整定在线寻找和保持好过程模型是较难的。闭环工作时,要求在过程中插入一个测试信号。这个方法会引起扰动,所以基于模型的PID参数自整定在工业应用不是太好。
如果自整定是基于控制律的,经常难以把由负载干扰引起的影响和过程动态特性变化引起的影响区分开来,因此受到干扰的影响控制器会产生超调,产生一个不必要的自适应转换。另外,由于基于控制律的系统没有成熟的稳定性分析方法,参数整定可靠与否存在很多问题。
因此,许多自身整定参数的PID控制器经常工作在自动整定模式而不是连续的自身整定模式。自动整定通常是指根据开环状态确定的简单过程模型自动计算PID参数。
二、专家整定PID控制系统的实现原理
专家控制的实质是基于受控对象和控制规律的各种知识,并以智能的方式利用这些知识来设计控制器。利用专家经验来设计PID参数便构成专家PID控制。
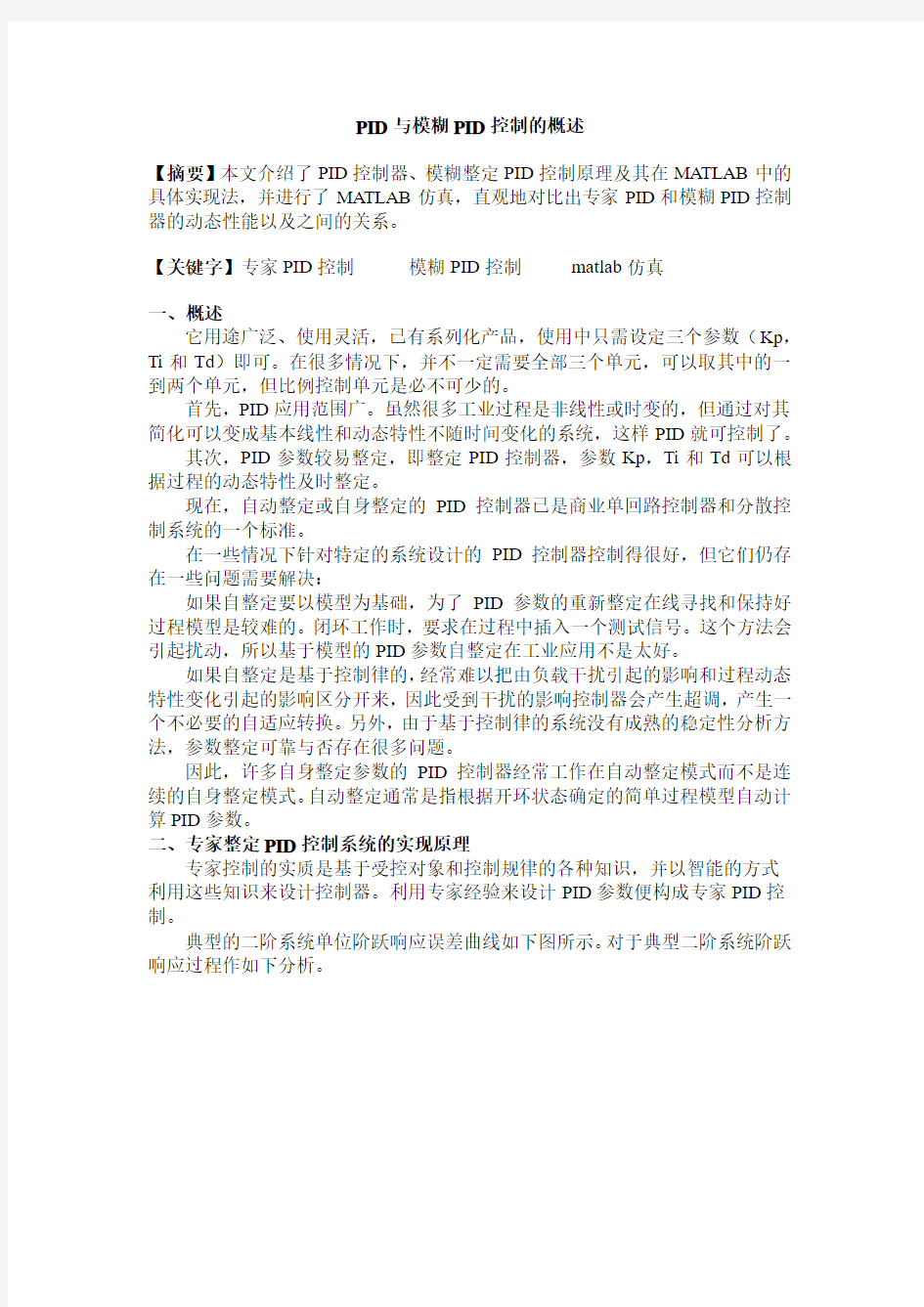
典型的二阶系统单位阶跃响应误差曲线如下图所示。对于典型二阶系统阶跃响应过程作如下分析。
令e(k)表示离散化的当前采样时刻的误差值,e(k-1)、e(k-2)分别表示前一个和前
两个采样时刻的误差值,则有
)1()()(--=?k e k e k e
)2()1()1(---=-?k e k e k e
根据误差及其变化,可设计专家PID 控制器,该控制器可分为以下五种情况进行设计:
(1) 当1|)(|M k e >时,说明误差的绝对值已经很大了。无论误差变化趋势如何,都应考虑控制器的输出应按最大或最小输出,以达到迅速调整误差,使得误差绝对值以最大速度减小。此时,它相当于开环控制。
(2) 当0)()(>?k e k e 时,说明误差在朝误差对值增大方向变化,或误差为某一常值,未发生变化。此时,如果2|)(|M k e >,说明误差也较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小误差的绝对值,控制器输出可为
)]}2()1(2)([)()]1()([{)1()(1-+--++--+-=k e k e k e k k e k k e k e k k u k u d i
(3.2)2|)(|M k e <,说明尽管误差朝绝对值增大方向变化,但是误差绝对值本身并不很大,可考虑控制器实施一般的控制作用,只要扭转误差趋势,使其朝误差绝对值减小方向变化,控制器输出为
)]2()1(2)([)()]1()([)1()(-+--++--+-=k e k e k e k k e k k e k e k k u k u d I p
(3.3) (3)当0)1()(,0)()(>-??
(4)当0)1()(,0)()(<-??
)()1()(k e k k k u k u m p I +-= (3.4)
如果此时误差的绝对值很小,即2|)(|M k e <,可考虑实施较弱的控制作用
)()1()(2k e k k k u k u m p +-= (3.5)
(5)当ε≤|)(|k e 时说明误差的绝对值很小,此时加入积分,减小稳态误差。式中,)(k e m ——误差e 的第k 个极值;
)(k u ——第k 次控制器的输出;
)1(-k u ——第k-1次控制器的输出; I k ——增益放大系数,I k >1;
2k ——抑制系数,0<2k <1;
21,M M ——设定的误差极限,21M M >;
k ——控制周期的序号(自然数);
ε——任意小的正实数。
在上图中,I 、III 、V 、VII 、…区域,误差朝绝对值减小的方向变化。此时,可采取保持等待措施,相当于实施开环控制;II 、IV ,VI 、VIII 、…区域,误差绝对值朝增大的方向变化。此时,可根据误差的大小分别实施较强或一般的控制作用,以抑制动态误差。
三、整定PID 仿真实例
三阶传递函数的阶跃响应
s
s s s G p 1047035.87523500)(23++= 其中对象采样时间为lms 。
采用专家PID 设计控制器。在仿真过程中,ε取0.001,程序中的五条规则与控制算法的五种情况相对应,其结果如下
实现代码附录1.
四、模糊整定PID 控制系统的原理
在工业生产过程中,许多被控制对象随着负荷变化或干扰因素影响,其对象特性参数或结构发生改变。自适应控制运用现代控制理论在线辨识对象特征参数,实时改变其控制策略,是控制系统品质指标保持在最佳范围内,但其控制效果的好坏取决于辨识模型的精确度,这对于复杂系统是非常困难的。因此,在工业生产过程中,大量采用的任然是PID 算法,PID 参数的整定方法很多,但大多数都以对象特性为基础。
随着计算机技术的发展,人们利用人工智能的方法将操作人员的调整经验最为只是存入计算机中,根据现场实际情况,计算机能自动调整PID 参数,这样就出现了智能PID 控制器。这种控制器把古典的PID 控制与先进的专家系统相结合,实现系统的最佳控制。这中控制必须精确的确定对象模型,首先将操作人员长期实践积累的经验只是用控制规则模型化,然后运用推理便可对PID 参数实现最佳调整。
由于操作者经验不易精确描述,控制过程中各种信号量以及评价指标不一定量表示,模糊理论是解决这一问题的有效途径,所以人们运用模糊数学的基本理论和方法,把过则的条件、操作用模糊集表示,并把这些模糊控制规则以及有关信息最为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理,即可自动实现对PID 参数的最佳调整,这就是模糊自适应PID 控制。模糊自适应PID 控制器目前有多种结构形式,可以满足不同时刻的e 和ec 对PID 参数自整定的要求。利用模糊控制规则在线对PID 参
数进行修改,便构成了自适应模糊PID 控制器,其结构如下图
PID 参数模糊自整定是找出PID 三个参数与e 和ec 之间的模糊关系,在运
行中通过不断检测e 和ec ,根据模糊控制原理来对3个参数进行在线修改,以满足不同e 和ec 时对控制参数的不同要求,而使被控制对象有良好的动、静态性能。
从系统的稳定性、响应速度、超调量和稳态精度等各方面来考虑,d i p k k k ,,,的作用如下:
(1)比例系数p k 的作用是加快系统地响应速度,提高系统的调节精度。p k 越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定。p k 取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变差。
(2)积分作用系数,i k 的作用是消除系统的稳态误差。,i k 越大,系统的静态误差消除越快,但,i k 越大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。若,i k 过小,将使系统静态误差难以消除,影响系统的调节精度。
(3)微分作用系数d k 的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但d k 过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。
PID 参数的整定必须考虑到在不同时刻三个参数的作用以及相互之间的互联关系。 在线时实模糊自整定PID 控制器控制方案原理如上图。
模糊自整定PID 是在PID 算法的基础上,通过计算当前系统误差e 和误差变化率ec ,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数整定。
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对d i p k k k ,,,三个参数分别整定的模糊控制表。
(1)p k 的模糊规则表,如下图
(2),i k 的模糊规则表如下
(3)d k 的模糊控制规则表如下
d i p k k k ,,,的模糊控制规则表建立好后,可根据如
下方法进行d i p k k k ,,,的自适应校正。
将系统误差e 和误差变化率ec 变化范围定义为模
糊集上的论域。
}5,4,3,2,1,0,1,2,3,4,5{,-----=ec e (3.6)
其模糊子集为
},,,,,,{,PB PM PS O NS NM NB ec e =,子集中元素分别
代表负大,负中,负小,零,正小,正中,正大。设
e ,ec 和d i p k k k ,,,均服从正态分布,因此可得出各模
糊子集的隶属度,根据个各模糊子集的隶属度赋值表
和各参数模糊控制模型,应用模糊合成推理设计PID
参数的模糊矩阵表,查处修正参数带入下式计算
p i i p p ec e k k },{+= i i i i i ec e k k },{+= (3.7)
d i i d d ec
e k k },{+=
在线运行过程中,控制系统通过对模糊逻辑规则的结
果处理、查表和运算,完成对PID 参数的在线校正。其工作
流程图如左图
五、基于MATLAB 的模糊整定PID 控制系统仿真
被控对象为
s
s s s G p 1047035.87523500)(23++= 采样时间为1ms ,采用模糊PID 控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,相应的响应结果如下图
Fuzzy Logic Based Autonomous Skid Steering Vehicle Navigation L.Doitsidis,K.P.Valavanis,N.C.Tsourveloudis Technical University of Crete Department of Production Engineering and Management Chania,Crete,Greece GR-73100 {Idoitsidis ,kimonv,nikost}@dpem.tuc.gr Abstract-A two-layer fuzzy logic controller has been designed for 2-D autonomous Navigation of a skid steering vehicle in an obstacle filled environment. The first layer of the Fuzzy controller provides a model for multiple sonar sensor input fusion and it is composed of four individual controllers, each calculating a collision possibility in front, back, left and right directions of movement. The second layer consists of the main controller that performs real-time collision avoidance while calculating the updated course to be applicability and implementation is demonstrated through experimental results and case studies performed o a real mobile robot. Keywords - Skid steering, mobile robots, fuzzy navigation. Ⅰ.INTRODUCTION The exist several proposed solutions to the problem of autonomous mobile robot navigation in 2-D uncertain environments that are based on fuzzy logic[1],[2],evolutionary algorithms [3],as well as methods combining fuzzy logic with genetic algorithms[4] and fuzzy logic with electrostatic potential fields[5]. The paper is the outgrowth of recently published results [9],[10],but it studies 2-D environments navigation and collision avoidance of a skid steering vehicle. Skid steering vehicles are compact, light, require few parts to assemble and exhibit agility from point turning to line driving using only the motions, components, and swept volume needed for straight line driving. Skid steering vehicle motion differs from explicit steering vehicle motion in the way the skid steering vehicle turns. The wheels rotation is limited around one axis and the back of steering wheel results in navigation determined by the speed change in either side of the skid steering vehicle. Same speed in either side results in a straight-line motion. Explicit steering vehicles turn differently since the wheels are moving around two axes. The geometric configuration of a skid steering vehicle in the X-Y plane is shown in Fig1,while a t is the heading angle, W is the robot width, θthe sense of rotation and S1, S2 are the speeds in the either side of the robot. The derived and implemented planner a two-layer fuzzy logic based controller that provides purely” reactive behavior” of the vehicle moving in a 2-D obstacle filled environment, with inputs readings from a ring of 24 sonar sensors and angle errors, and outputs the updated rotational and translational velocities of the vehicle. Ⅱ.DESIGN OF THE FUZZY LOGIC CONTROL SYSTEM
模糊PID 控制器的设计与仿真 设计模糊PID 控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。 本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔK P ,ΔK D ,ΔK I ,在设计模糊PID 的过程中,需要 将这些精确量转换成为模糊论域上的模糊值。本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6]。 模糊PID 控制器的设计选用二维模糊控制器。以给定值的偏差e 和偏差变化ec 为输入;ΔK P ,ΔK D ,ΔK I 为输出的自适应模糊PID 控制器,见图1。 图1模糊PID 控制器 (1)模糊变量选取 输入变量E 和EC 的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。就本系统而言,设置语言变量取七个,分别为 NB ,NM ,NS ,ZO ,PS ,PM ,PB 。 (2)语言变量及隶属函数 根据控制要求,对各个输入,输出变量作如下划定: e ,ec 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} ΔK P ,ΔK D ,ΔK I 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} 应用模糊合成推理PID 参数的整定算法。第k 个采样时间的整定为 ).()(,)()(,)()(000k K K k K k K K k K k K K k K D D D I I I P P P ?+=?+=?+= 式中000,,D I P K K K 为经典PID 控制器的初始参数。
1998年的IEEE 国际会议上机器人及自动化 Leuven ,比利时1998年5月 一种实用的办法--带拖车移动机器人的反馈控制 F. Lamiraux and J.P. Laumond 拉斯,法国国家科学研究中心 法国图卢兹 {florent ,jpl}@laas.fr 摘要 本文提出了一种有效的方法来控制带拖车移动机器人。轨迹跟踪和路径跟踪这两个问题已经得到解决。接下来的问题是解决迭代轨迹跟踪。并且把扰动考虑到路径跟踪内。移动机器人Hilare的实验结果说明了我们方法的有效性。 1引言 过去的8年,人们对非完整系统的运动控制做了大量的工作。布洛基[2]提出了关于这种系统的一项具有挑战性的任务,配置的稳定性,证明它不能由一个简单的连续状态反馈。作为替代办法随时间变化的反馈[10,4,11,13,14,15,18]或间断反馈[3]也随之被提出。从[5]移动机器人的运动控制的一项调查可以看到。另一方面,非完整系统的轨迹跟踪不符合布洛基的条件,从而使其这一个任务更为轻松。许多著作也已经给出了移动机器人的特殊情况的这一问题[6,7,8,12,16]。 所有这些控制律都是工作在相同的假设下:系统的演变是完全已知和没有扰动使得系统偏离其轨迹。很少有文章在处理移动机器人的控制时考虑到扰动的运动学方程。但是[1]提出了一种有关稳定汽车的配置,有效的矢量控制扰动领域,并且建立在迭代轨迹跟踪的基础上。 存在的障碍使得达到规定路径的任务变得更加困难,因此在执行任务的任何动作之前都需要有一个路径规划。 在本文中,我们在迭代轨迹跟踪的基础上提出了一个健全的方案,使得带拖车的
机器人按照规定路径行走。该轨迹计算由规划的议案所描述[17],从而避免已经提交了输入的障碍物。在下面,我们将不会给出任何有关规划的发展,我们提及这个参考的细节。而且,我们认为,在某一特定轨迹的执行屈服于扰动。我们选择的这些扰动模型是非常简单,非常一般。它存在一些共同点[1]。 本文安排如下:第2节介绍我们的实验系统Hilare及其拖车:两个连接系统将被视为(图1)。第3节处理控制方案及分析的稳定性和鲁棒性。在第4节,我们介绍本实验结果。 图1带拖车的Hilare 2 系统描述 Hilare是一个有两个驱动轮的移动机器人。拖车是被挂在这个机器人上的,确定了两个不同的系统取决于连接设备:在系统A的拖车拴在机器人的车轮轴中心线上方(图1 ,顶端),而对系统B是栓在机器人的车轮轴中心线的后面(图1 ,底部)。A l= 0 。这个系统不过单从控制的角度来看,需要更对B来说是一种特殊情况,其中 r 多的复杂的计算。出于这个原因,我们分开处理挂接系统。两个马达能够控制机器人的线速度和角速度(v r,r ω)。除了这些速度之外,还由传感器测量,而机器人和拖车之间的角度?,由光学编码器给出。机器人的位置和方向(x r,y r,rθ)通过整合前的速度被计算。有了这些批注,控制系统B是:
摘要 交流伺服电机现广泛应用于机械结构的驱动部件和各种数控机床。PID控制是伺服系统中使用最多的控制模式之一。尽管传统的PID控制系统构造简单、运转稳定,但交流伺服电机存在非线性的、强耦合。当参数变动或非线性因素的影响发生变化时,控制不能实时改动,不能满足系统高性能、高精度的要求。结合模糊控制和传统PID控制成一种新的控制方法--模糊PID控制是解决上述问题的一种很好的途径。模糊控制器不需要被控对象的数学模型,而是根据之前人为设定的控制要求设计用来控制的决策算法,使用此方式确定控制量。模糊控制和传统PID控制融合的结果,不单具有模糊控制的高性能,还具备传统PID控制精准度高的长处。 本文对PID控制算法的原理和模糊控制算法作了简要的描述和比较。指出模糊PID混合控制法,在误差很大时使用模糊控制,在不大时使用PID控制,在MATLAB软件中,对交流伺服系统的位置控制进行了仿真。结果表明,该控制系统仿真结果与理论上差距较小。 关键词:PID控制;模糊控制;模糊PID控制器;MATLAB 第1章绪论 1.1 研究课题的任务 本课题的任务是了解交流伺服系统,比较并结合两种控制的优点,结合成一种新的控制方式--模糊PID控制。该控制法在系统输出差距大时采用模糊控制,而在差距较小时采用PID控制。文章最后给出了模糊PID位置控制的MATLAB响应图,同时给出了常规PID控制下的效果图,并比较分析。 1.3 交流伺服系统工作原理 相对单一的系统,其一般是根据位置检测反馈组成闭环位置伺服系统。其组成框图参考图1-1内容[14]。 此类系统主要原理是对比输入的目标位置信号和位置检测设备测试的真实位置信号统计其偏差且使用功率变换器的输入端弱化误差。控制量被信号转换和功率放大驱动,驱动伺服组织,促使误差不断缩减少,一直到最佳值。 (1)位置检测装置是此类系统的关键构成方面,完整系统的动态功能是否可以满足需求,关键的是位置检测传感器的科学选择以及精度。当前普遍使用的位置传感器主要是接触式,接近式,曲轴位置,节气门位置等多种类型的传感器。 (2)在此类系统中,功率变换器是完成此类电机高性能调速的关键。此外,它应该具备较稳定的输出功率和较高的调频电压精度,而且还需要在有温差是稳定运行的能力、较强的电磁抗干扰能力、系统异常保护的功能。 (3)伺服电机是伺服系统的主要组成部分。伺服电机具有良好的低速特性是伺服电机具有高精度的关键。伺服系统的快速响应(急停,启动)也指出此类电机需要具备更小的转动惯量、较高加速转矩(过载转矩)、相对平稳性等。当前被普遍使用的主要是感应式交流异步电动机等类型。 (4)控制器其一般包含微处理芯片,比如微处理器以及数字信号处理器(DSP)等部分。 一般闭环控制系统的功能更加完善,具备方位、速度与电流反馈等功能。参考图1-2可知。 图1-2 交流伺服系统的三闭环结构 电流环和速度环全部是内环。前者的功能是: 提升内环控制主体的传递函数的精准性,促进系统的平稳运作。 避免电流环内部的干扰; 防止发生电路内电流超出额定数值的问题,保证系统的安全运行。
译文 流体传动及控制技术已经成为工业自动化的重要技术,是机电一体化技术的核心组成之一。而电液比例控制是该门技术中最具生命力的一个分支。比例元件对介质清洁度要求不高,价廉,所提供的静、动态响应能够满足大部分工业领域的使用要求,在某些方面已经毫不逊色于伺服阀。比例控制技术具有广阔的工业应用前景。但目前在实际工程应用中使用电液比例阀构建闭环控制系统的还不多,其设计理论不够完善,有待进一步的探索,因此,对这种比例闭环控制系统的研究有重要的理论价值和实践意义。本论文以铜电解自动生产线中的主要设备——铣耳机作为研究对象,在分析铣耳机组各构成部件的基础上,首先重点分析了铣耳机的关键零件——铣刀的几何参数、结构及切削性能,并进行了实验。用电液比例方向节流阀、减压阀、直流直线测速传感器等元件设计了电液比例闭环速度控制系统,对铣耳机纵向进给装置的速度进行控制。论文对多个液压阀的复合作用作了理论上的深入分析,着重建立了带压差补偿型的电液比例闭环速度控制系统的数学模型,利用计算机工程软件,研究分析了系统及各个组成环节的静、动态性能,设计了合理的校正器,使设计系统性能更好地满足实际生产需要 水池拖车是做船舶性能试验的基本设备,其作用是拖曳船模或其他模型在试验水池中作匀速运动,以测量速度稳定后的船舶性能相关参数,达到预报和验证船型设计优劣的目的。由于拖车稳速精度直接影响到模型运动速度和试验结果的精度,因而必须配有高精度和抗扰性能良好的车速控制系统,以保证拖车运动的稳速精度。本文完成了对试验水池拖车全数字直流调速控制系统的设计和实现。本文对试验水池拖车工作原理进行了详细的介绍和分析,结合该控制系统性能指标要求,确定采用四台直流电机作为四台车轮的驱动电机。设计了电流环、转速环双闭环的直流调速控制方案,并且采用转矩主从控制模式有效的解决了拖车上四台直流驱动电机理论上的速度同步和负载平衡等问题。由于拖车要经常在轨道上做反复运动,拖动系统必须要采用可逆调速系统,论文中重点研究了逻辑无环流可逆调速系统。大型直流电机调速系统一般采用晶闸管整流技术来实现,本文给出了晶闸管整流装置和直流电机的数学模型,根据此模型分别完成了电流坏和转速环的设计和分析验证。针对该系统中的非线性、时变性和外界扰动等因素,本文将模糊控制和PI控制相结合,设计了模糊自整定PI控制器,并给出了模糊控制的查询表。本文在系统基本构成及工程实现中,介绍了西门子公司生产的SIMOREGDC Master 6RA70全数字直流调速装置,并设计了该调速装置的启动操作步骤及参数设置。完成了该系统的远程监控功能设计,大大方便和简化了对试验水池拖车的控制。对全数字直流调速控制系统进行了EMC设计,提高了系统的抗干扰能力。本文最后通过数字仿真得到了该系统在常规PI控制器和模糊自整定PI控制器下的控制效果,并给出了系统在现场调试运行时的试验结果波形。经过一段时间的试运行工作证明该系统工作良好,达到了预期的设计目的。 提升装置在工业中应用极为普遍,其动力机构多采用电液比例阀或电液伺服阀控制液压马达或液压缸,以阀控马达或阀控缸来实现上升、下降以及速度控制。电液比例控制和电液伺服控制投资成本较高,维护要求高,且提升过程中存在速度误差及抖动现象,影响了正常生产。为满足生产要求,提高生产效率,需要研究一种新的控制方法来解决这些不足。随着科学技术的飞速发展,计算机技术在液压领域中的应用促进了电液数字控制技术的产生和发展,也使液压元件的数字化成为液压技术发展的必然趋势。本文以铅电解残阳极洗涤生产线中的提升装置为研究
模糊控制理论 概述 模糊逻辑广泛适用于机械控制。这个词本身激发一个一定的怀疑,试探相当于“仓促的逻辑”或“虚假的逻辑”,但“模糊”不是指一个部分缺乏严格性的方法,而这样的事实,即逻辑涉及能处理的概念,不能被表达为“对”或“否”,而是因为“部分真实”。虽然遗传算法和神经网络可以执行一样模糊逻辑在很多情况下,模糊逻辑的优点是解决这个问题的方法,能够被铸造方面接线员能了解,以便他们的经验,可用于设计的控制器。这让它更容易完成机械化已成功由人执行。 历史以及应用 模糊逻辑首先被提出是有Lotfi在加州大学伯克利分校在1965年的一篇论文。他阐述了他的观点在1973年的一篇论文的概念,介绍了语言变量”,在这篇文章中相当于一个变量定义为一个模糊集合。其他研究打乱了,第二次工业应用中,水泥窑建在丹麦,即将到来的在线1975。 模糊系统在很大程度上在美国被忽略了,因为他们更多关注的是人工智能,一个被过分吹嘘的领域,尤其是在1980年中期年代,导致在诚信缺失的商业领域。 然而日本人对这个却没有偏见和忽略,模糊系统引发日立的Seiji Yasunobu和Soji Yasunobu Miyamoto的兴趣。,他于1985年的模拟,证明了模糊控制系统对仙台铁路的控制的优越性。他们的想法是被接受了,并将模糊系统用来控制加速、制动、和停车,当线于1987年开业。 1987年另一项促进模糊系统的兴趣。在一个国际会议在东京的模糊研究那一年,Yamakawa论证<使用模糊控制,通过一系列简单的专用模糊逻辑芯片,在一个“倒立摆“实验。这是一个经典的控制问题,在这一过程中,车辆努力保持杆安装在顶部用铰链正直来回移动。 这次展示给观察者家们留下了深刻的印象,以及后来的实验,他登上一Yamakawa酒杯包含水或甚至一只活老鼠的顶部的钟摆。该系统在两种情况下,保持稳定。Yamakawa最终继续组织自己的fuzzy-systems研究实验室帮助利用自己的专利在田地里的时候。
模糊PID控制器 o引言: PID控制作为一种典型的传统反馈控制器,以其结构简单,易于实现和鲁棒性好等特点 在工业过程控制中广泛应用。但是传统PID控制器的参数需要被控对象的数学模型来进行调整,而控制过程中的滞后性、控制参数的非线性和高阶陛增加了对Kp、Ki、Kd三个参数的 调整难度。所以对确定的控制系统通过复杂的计算后,其三个参数的值在控制运行中一般是 固定的,不易进行在线的调整。而在实际的工业生产过程中,许多被控对象受到负荷变化和 干扰因素的作用,其对象参数的特征和结构易发生改变,这就需要对参数进行动态的调整。同样因为被控系统的复杂性和不确定性,其精确的数学模型难以建立,甚至无法建立模型,所以需要利用模糊控制技术等方法来解决。模糊PID无需考虑被控系统的模型,而只根据其 误差e和误差变化ec等检测数据来自适应调整Kp、Ki、Kd的值,最终使被控系统处于稳定工作态。1、传统PID控制器: PID参数模糊自整定是找出PID中3个参数与e和ec之间的模糊关系,在运行中通过 不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,而使被控对象有良好的动稳态性能。从系统的稳定性、响应速度、超调量和稳态精度等方面来考虑Kp,Ki,Kd的作用如下: (1)比例系数Kp的作用是:加快系统的响应速度,提高系统的调节精度。Kp越大,系统的响 应速度越快,系统的调节精度越高,但易产生超调,甚至导致系统不稳定;Kp取值过小, 则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏。 ⑵积分作用系数Ki的作用是:消除系统的稳态误差。Ki越大,系统的稳态误差消除越快, 但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调;若Ki 过小,将使系统稳态误差难以消除,影响系统的调节精度。 (3)微分作用系数Kd的作用是:改善系统的动态特性。其作用主要是能反应偏差信号的变化趋势,并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。 2、模糊PID参数自整定控制器设计 2.1控制器结构: 2.2模糊化 由PID各个参数对系统的影响得到:
基于模糊控制的matlab simulink仿真 摘要:为提高工业上所需温度的控制精度,在本文中详细介绍如何设计模糊控制器,以及如何在在MA TLAB中建立模型,并使用模糊工具箱和SIMULINK在Matlab中实现参数的计算机模拟控制系统。在该系统中,通过采用模糊控制算法对温度实现了很好的控制,并且该系统正处于实际工业电阻炉温度控制的应用和试行阶段,也达到了满意的控制效果。实践表明,模糊控制方法提高了控制的实时性,稳定性和精确度,并且实现了操作过程的简化,对于工程实际应用具有较强的借鉴意义。 关键词:模糊控制,SIMULINK,MATLAB,仿真 1介绍系统 MATLAB / Simulink是一种世界通用的科学计算和仿真的语言, Simulink则是一个以系统级仿真环境为基础的系统框图和程序框图,这个环境提供了很多的专业模块库:如CDMA参考仿真、数字信号处理器(DSP)模块库等。它是一个动态的系统建模,仿真和仿真结果具有以下特点: (1)调用代理模块框图是连接到系统的工程,使建模和仿真系统的框图,更全面,研究信息系统具有高的开放性。 (2)使用户可以自由修改模块的参数,并可以无限的使用所有的MATLAB分析工具,因此MATLAB具有高互动性。 (3)仿真结果可以几乎跟在实验室里显示的图形或数据是一样的。 模糊逻辑控制、自动化的发展和它们未来的发展策略,是一种智能控制系统,已经受到了极大的关注。它使用语言规则和模糊集进行模糊推理。为了解决复杂的系统,包括非线性、不确定性和精确的数学模型难以建立的问题,就可以采用模糊控制技术,目前,此技术被广泛使用。温度控制通常采用传统的PID控制算法,但是控制效果较不明显的。当情况的变化时将改变系统参数,PID参数也需要及时调整,否则会产生更糟糕的动态特性,使控制精度下降。当温度偏差太大时,容易导致积分饱和的现象,导致控制时间太久和其他的问题。在同一时间,模糊工具箱和SIMULINK在用MATLAB来实现参数控制系统的计算机仿真技术,能提高效率和系统设计的精度。 整个系统以AT89S51单片机为核心、以温度数据采集电路,过零检测和触发电路、键盘和显示电路、记忆电路(CF卡)、声光报警电路、复位电路等组成硬件部分,还有相应的控制软件等构成了完整电阻炉温度控制系统,其系统框图如图1-1所示。
常规PID和模糊PID算法的分析比较 摘要:模糊PID控制器实际上跟传统的PID控制器有很大联系。区别在于传统的控制器的控制前提必须是熟悉控制对象的模型结构,而模糊控制器因为它的非线性特性,所以控制性能优于传统PID控制器。对于时变系统,如果能够很好地采用模糊控制器进行调节,其控制结果的稳定性和活力性都会有改善。但是,如果调节效果不好,执行器会因为周期振荡影响使用寿命,特别是调节器是阀门的场合,就必须考虑这个问题。为了解决这个问题,出现了很多模糊控制的分析方法。本文提出的方法采用一个固定的初始域,这样相当程度上简化了模糊控制的设定问题以及实现。文中分析了振荡的原因并分析如何抑制这种振荡的各种方法,最后,还给出一种方案,通过减少隶属函数的数量以及改善解模糊化的方法缩短控制信号计算时间,有效的改善了控制的实时性。 1 引言 模糊控制器的一个主要缺陷就是调整的参数太多。特别是参数设定的时候,因为没有相关的书参考,所以它的给定非常困难。众所周知,优化方法的收敛性跟它的初始化设定有很大关联,如果模糊控制器的初始域是固定的,那么它的控制就明显的简化了。而且我们要控制的参数大多有其实际的物理意义,所以模糊控制器完全可以利用PID算法的控制规律进行近似的调整。也就是说最简单的模糊PID控制器就是同时采用几种基本模糊控制算法(P+I+D或者PI+D),控制过程中它会根据控制要求,做出适当的选择,保证在处理跟踪以抗阶跃干扰问题上,其控制性能接近于任何一种PID控制。假设模糊集的初始域是对称的,两个调节器的参数采用Ziegler-Nichols方法。 为了改善上述设计的模糊控制器,我们有必要考模糊控制器的参数问题,有两种方法可以采纳,一种采用手动的方法改变,另一种就是采用一些相关的优化算法。其中遗传算法就是一种。控制器采用的参数不同,其收敛的优化值也会不一样。这些参数包括模糊集的分布,模糊集的个数,映射规则,基本模糊控制器的参数和不同的算法组合等。要注意的是在优化前必须选定模糊推理及解模糊的方法。很明显,优化过程很耗时,更有甚者,有些优化方法要已知系统的精确模型,但是实际过程中难以得到系统的精确模型,所以在大多数情况下,这些优化算法不能直接应用在实际过程。也就是说模型不精确直接影响优化成败。模糊控制的主要思想就是针对那些传递函数未知的或者结构难以辨识的系统进行控制,这也是模糊控制的性能为什么优于传统方法的原因。同时,把模糊控制和传统的PID控制算法结合起来,更能体现这种算法的优点,因为它大大简化实际过程的调整。 图1 隶属函数图图2映射规则图参数集的启发式优化法也适用于模糊PI控制器,它采用固定的定义域,其参数的选取和
LED点阵显示屏中英文对照外文翻译文献(文档含英文原文和中文翻译)
译文: 基于AT89C52单片机的LED显示屏控制系统的设计 摘要这篇文章介绍了基于AT89C52单片机的LED点阵显示屏的软件和硬件开发过程。使用一个简单的外部电路来控制像素是32×192的显示屏。用动态扫描,显示屏可以显示6个32×32的点阵汉字。显示屏也可以分为两个小的显示屏,它可以显示24个像素是16×16的汉字。可以通过修改代码来改变显示的内容和字符的滚动功能,而且可以根据需要调整字符的滚速或者暂停滚动。中文字符代码存储在外部存储寄存器中,内存的大小由需要显示的汉字个数决定。这种显示屏具有体积小,硬件和电路结构简单的优点。 关键词发光二极管汉字显示AT89C52单片机 1.导言 随着LED显示屏不断改善和美化人们的生活环境,LED显示屏已经成为城市明亮化,现代化、信息化的一项重要标志。在大的购物商场,火车站,码头,地铁,大量的管理窗口等,我们经常可以看到LED灯光。LED商业已成为一个快速增长的新产业,拥有巨大的市场空间和光明前景。文章,图片,动画和视频通过LED发光显示,并且内容可以变换。一些显示设备的模块化结构,通常有显示模块,控制系统和电源系统。显示模块是由LED管组成的点阵结构,进行发光显示,可以显示文章,图片,视频等。控制系统可以控制区域里LED的亮灭,电源系统为显示屏提供电压和电流。用电脑,取出字符字节,传送到微控制器,然后送到LED点阵显示屏上进行显示,很多室内和室外显示屏都是通过这个方法进行显示的。按显示的内容区分,LED点阵屏的显示可分为图形显示、图片显示和视频显示三个部分。与图片显示屏比较,不管是单色或者彩色的图形显示屏,都没有灰色色差,所以,图形显示不能反映丰富的色彩。视频显示屏不但可以显示运动、清楚和全彩的图像,也可以显示电视和计算机信号。虽然三者
上机实验 已知系统的传递函数为G(S)=1/(10S+1)e-0.5s。假设系统给定为阶跃值r=30,系统的初始值r(0)=0试分别设计常规PID控制器和模糊控制器。 常规PID控制器的设计: 利用Ziegler-Nichols整定公式整定PID调节器的初始参数 由公式可得 P=18 Ti=1.65 Td=0 SIMULINK仿真图 设定仿真时间为10s 仿真结果 模糊控制器的设定 1在matlab命令窗口输入“fuzzy”确定模糊控制器结构:即根据具体的系统确定输入、输出量。选取二维控制结构,即输入为误差e和误差变化ec,输出为u如下图所示 2输入输出变量的模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。首先我们要确定描述输入输出变量语言值的模糊子集,如{NB,NM,NS,ZO,PS,PM,PB},并设置输入输出变量的论域,然后我们为模糊语言变量选取相应的隶属度函数。如下图所示 3模糊推理决策算法设计:即根据模糊控制规则进行模糊推理,并决策出模糊输出量。首先要确定模糊规则,即专家经验。如图。
制定完之后,会形成一个模糊控制规则矩阵,然后根据模糊输入量按照相应的模糊推理算法完成计算,并决策出模糊输出量。 4.对输出模糊量的解模糊:模糊控制器的输出量是一个模糊集合,通过反模糊化方法判决出一个确切的精确量,反模糊化方法很多,我们这里选取重心法。 SIMULINK仿真图 在模糊控制器的输入和输出均有一个比例系数,我们叫它量化因子,它反映的是模糊论域范围与实际范围之间的比例关系,这里模糊控制器输入的论域范围均为[-6,6],假设误差的范围是[-10,10],误差变化率范围是[-100,100],控制量的范围是[-24,24],那么我们就可以算出量化因子分别为0.6,0.06,8。量化因子的选取对于模糊控制器的控制效果有很大的影响,当输出量化因子调为10控制效果更好。 仿真曲线 常规PID控制器和模糊控制器的比较 由仿真结果可见两种控制器对系统的各项性能指标都有了改进,常规PID还是有超调量,模糊控制器的超调量几乎为零。
CONTROL, PID CONTROL, AND ADVANCED FUZZY CONTROL FOR SIMULATING A NUCLEAR REACTOR OPERATION XIAOZHONG LI and DA RUAN* elgian Nuclear Research Centre (SCKoCEN Boeretang 200, 8-2400 Mol, Belgium (Received 15 March 1999) Based on the background of fuzzy control applications to the first nuclear reactor in Belgium (BRI) at the Belgian Nuclear Research Centre (SCK.CEN), we have made a real fuzzy logic control demo model. The demo model is suitable for us to test and com- pare some new algorithms of fuzzy control and intelligent systems, which is advantageous because it is always difficult and time-consuming, due to safety aspects, to do all experiments in a real nuclear environment. In this paper, we first report briefly on the construction of the demo model, and then introduce the results of a fuzzy control, a proportional-integral-derivative (PID) control and an advanced fuzzy control, in which the advanced fuzzy control is a fuzzy control with an adaptive function that can Self-regulate the fuzzy control rules. Afterwards, we present a comparative study of those three methods. The results have shown that fuzzy control has more advantages in terms of flexibility, robustness, and easily updated facilities with respect to the PID control of the demo model, but that PID control has much higher regulation resolution due to its integration term. The adaptive fuzzy control can dynamically adjust the rule base, therefore it is more robust and suitable to those very uncertain occasions. Keywords: Fuzzy control; PID control; fuzzy adaptive control; nuclear reactor I INTRODUCTION Today the techniques of fuzzy logic control are very mature in most engineering areas, but not in nuclear engineering, though some research has been done (Bernard, 1988; Hah and Lee, 1994; Lin et al. 1997; Matsuoka, 1990). The main reason is that it is impossible to do experiments in nuclear engineering as easily as in other industrial areas. For example, a reactor is usually not available to any individual. Even for specialists in nuclear engineering, an official licence for doing any on-line test is necessary. That is why we are still
基于神经网络和遗传算法的模糊系统的自动设计摘要 本文介绍了基于神经网络和遗传算法的模糊系统的设计,其目的在于缩短开发时间并提高该系统的性能。介绍一种利用神经网络来描绘的多维非线性隶属函数和调整隶属函数参数的方法。还提及了基于遗传算法的集成并自动化三个模糊系统的设计平台。 1 前言 模糊系统往往是人工手动设计。这引起了两个问题:一是由于人工手动设计是费时间的,所以开发费用很高;二是无法保证获得最佳的解决方案。为了缩短开发时间并提高模糊系统的性能,有两种独立的途径:开发支持工具和自动设计方法。前者包括辅助模糊系统设计的开发环境。许多环境已具有商业用途。后者介绍了自动设计的技术。尽管自动设计不能保证获得最优解,他们仍是可取的手工技巧,因为设计是引导走向和依某些标准的最优解。 有三种主要的设计决策模糊控制系统设计: (1)确定模糊规则数, (2)确定隶属度函数的形式。 (3)确定变化参数 再者,必须作出另外两个决定: (4)确定输入变量的数量 (5)确定论证方法 (1)和(2)相互协调确定如何覆盖输入空间。他们之间有高度的相互依赖性。(3)用以确定TSK(Takagi-Sugeno-Kang)模式【1】中的线性方程式的系数,或确定隶属度函数以及部分的Mamdani模型【2】。(4)符合决定最低套相关的输入变量,计算所需的目标决策或控制的价值观。像逆向消除(4)和信息标准的技术在此设计中经常被利用。(5)相当于决定使用哪一个模糊算子和解模糊化的方法。虽然由数种算法和模糊推理的方法已被提出,仍没有选择他们标准。[5]表明动态变化的推理方法,他依据这个推理环境的结果在性能和容错性高于任何固定的推理的方法。 神经网络模型(以更普遍的梯度)和基于遗传算法的神经网络(最常见的梯度的基础)和遗传算法被用于模糊系统的自动设计。基于神经网络的方法主要是用来设计模糊隶属度函数。这有两种主要的方法; (一)直接的多维的模糊隶属度函数的设计: 该方法首先通过数据库确定规则的数目。然后通过每个簇的等级的训练来确定隶属函数的形式。更多细节将在第二章给出。 (二)间接的多维的模糊隶属度函数的设计: 这种方法通过结合一维模糊隶属函数构建多维的模糊隶属度函数。隶属度函数梯度技术被用于调节试图减少模糊系统的期望产量和实际生产所需的产出总量的误差。 第一种方法的优点在于它可以直接产生非线性多维的模糊隶属度函数;没有必要通过结合一维模糊隶属函数构建多维的模糊隶属度函数。第二种方法的优点在于可通过监测模糊系统的最后性能来调整。这两种方法都将在第二章介绍。 许多基于遗传算法的方法与方法二在本质上一样;一维隶属函数的形式利用遗传算法
温度单向输入系统增益调整模糊控制器 Shiuh-jer huang and chen-chuan wang 1,台北国立科技大学,车辆工程部,台湾省台北市106号,chung-hsiao 东路1号。 2,台湾国立科技大学,机械工程部,台湾省台北市106号,keelung路43号。 在很多化工和半导体制造过程中,温度是控制所需产品质量的重要参数。一般来说,温度控制系统具有响应速度慢,时滞,和单向控制输入特性等非线性的时变特征。很难估计出准确的动力学模型和设计出一种能够取得良好的控制特性的温度控制器。在这里提出了一种针对密闭铁腔单向加热输入控制器的无模型智能模糊增益调整控制策略。这个概念在控制过程中被用来调整增益调度的模拟隶属函数映射的适用范围从而改善控制性能。实验表明该控制方案无超调,并且稳态误差的阶跃输入响应总小于0.28℃。该方案适用于工业温度控制系统。 关键词:模糊控制温度控制和增益调度单向输入 1简介 在化学,材料,半导体制造过程中,温度是一个重要的控制参数。例如:退火,薄膜材料玻璃熔化炉沉积和电视都需要适当的温度控制系统。一些温度控制系统具有加热和冷却控制阶段,而其他系统只有加热输入控制阶段。他们的动态特性有着显著差异。加热器输入的温度控制系统比有两个阶段的控制系统更难以取得良好的控制效果。如何设计一种具有响应速度快,稳态误差小,无超调的特点的通用温度控制器在工业实施控制研究领域仍然是一种挑战。目前,开关控制和PID控制方案用于商业产品。在1936年,一种PID控制器被设计出来。目前,PID控制器已经广泛应用于工业自动化的控制系统。然而,如何调整控制增益因素是实施PID控制器的关键。如果精确的动态模型对于控制系统是有效的,nichols和ziegler规则(nichols和ziegler,1942年),和IMC控制策略(chien和fruehauf,1990;rivera等人1986年)可以计算出适当的收益。然而,供热厂有延时和温度依赖的非线性特性。对于一个PID控制器的设计很难建立精确的动态模型。一般来说,系统需要一个实验的过程来获得好的控制响应。当该系统具有外部干扰或设定值发生变化时,其瞬态响应也会变坏。这样的系统需要一个网络在线的工作人员来调整它或者切换到手动控制。然而这是一个不方便的应用,而且生产参数可能不保持在一个良好的成产水平上。因此,无模型智能控制方案已经得到了关注。 基于控制水浴加热温度提出了一种自整定PID控制策略(Yusof 等人,1994年)。采用频率loop-shaping技术来调整PID温度控制器的增益的一种化学气相
模糊控制 与传统PID控制比较
引言: 模糊控制不需要确定系统的精确数学模型,是一种基于规则的控制。模糊控制在智能控制领域由于理论研究比较成熟、实现相对比较简单、适应面宽而得到广泛的应用。不论是对复杂的水泥回转窑的控制,还是在智能化家用电器中的应用,模糊控制都充当着重要的角色。 一个典型工业过程通常可以等效为二阶系统加上一个非线性环节(如纯滞后),给出如下典型控制对象传递函数的一般形式: Gp(s)=K*e-τs/(T1s+1)(T2s+1) PID控制: PID控制是自动控制领域产生最早、应用最广的一种控制方法。 PID控制原理图:
PID控制器传递函数的一般表达式为: Gc(s)=kp+ki/s+kd*s kp为比例增益;ki为积分增益;kd为微分增益 控制器的关键是确定三个增益值,在simulink中搭建PID系统控制模型如下图示: PID仿真结果:
模糊控制: 模糊控制是运用语言归纳操作人员的控制策略,运用变量和模糊集合理论形成控制算法的一种控制。 模糊控制原理框图: 一个基本模糊控制器主要有三个功能: (1)模糊化:把精确量(如偏差e和偏差变化ec)转化为相应的模糊量(E、EC); (2)模糊推理:按总结的语言规则(模糊控制规则表)进行模糊推理; (3)模糊判决:把推理结果(U)从模糊量转化为可以用于实际控制的精确量(u) 模糊控制器的基本机构
设计模糊控制器主要步骤: 1.选择偏差e、偏差变化ec和控制量u的模糊语言变量为E、 EC和U。根据e、ec和u实际的基本论域,设定E、EC 和U论域都为[-6,6],可以确定出量化因子Ke、Kc和比例因子Ku。。 2.选取E、EC和U的各语言变量直,正大PB,正中PM,正小 PS,零ZE,负小NS,负中NM,负大NB,它们各自在论域上的模糊子集隶属度函数均为三角形, 3.根据总结的人工操作策略设计出模糊控制策略表: ek=yr-yk △ek=ek-ek-1