基于模糊控制的matlab simulink仿真
摘要:为提高工业上所需温度的控制精度,在本文中详细介绍如何设计模糊控制器,以及如何在在MA TLAB中建立模型,并使用模糊工具箱和SIMULINK在Matlab中实现参数的计算机模拟控制系统。在该系统中,通过采用模糊控制算法对温度实现了很好的控制,并且该系统正处于实际工业电阻炉温度控制的应用和试行阶段,也达到了满意的控制效果。实践表明,模糊控制方法提高了控制的实时性,稳定性和精确度,并且实现了操作过程的简化,对于工程实际应用具有较强的借鉴意义。
关键词:模糊控制,SIMULINK,MATLAB,仿真
1介绍系统
MATLAB / Simulink是一种世界通用的科学计算和仿真的语言, Simulink则是一个以系统级仿真环境为基础的系统框图和程序框图,这个环境提供了很多的专业模块库:如CDMA参考仿真、数字信号处理器(DSP)模块库等。它是一个动态的系统建模,仿真和仿真结果具有以下特点:
(1)调用代理模块框图是连接到系统的工程,使建模和仿真系统的框图,更全面,研究信息系统具有高的开放性。
(2)使用户可以自由修改模块的参数,并可以无限的使用所有的MATLAB分析工具,因此MATLAB具有高互动性。
(3)仿真结果可以几乎跟在实验室里显示的图形或数据是一样的。
模糊逻辑控制、自动化的发展和它们未来的发展策略,是一种智能控制系统,已经受到了极大的关注。它使用语言规则和模糊集进行模糊推理。为了解决复杂的系统,包括非线性、不确定性和精确的数学模型难以建立的问题,就可以采用模糊控制技术,目前,此技术被广泛使用。温度控制通常采用传统的PID控制算法,但是控制效果较不明显的。当情况的变化时将改变系统参数,PID参数也需要及时调整,否则会产生更糟糕的动态特性,使控制精度下降。当温度偏差太大时,容易导致积分饱和的现象,导致控制时间太久和其他的问题。在同一时间,模糊工具箱和SIMULINK在用MATLAB来实现参数控制系统的计算机仿真技术,能提高效率和系统设计的精度。
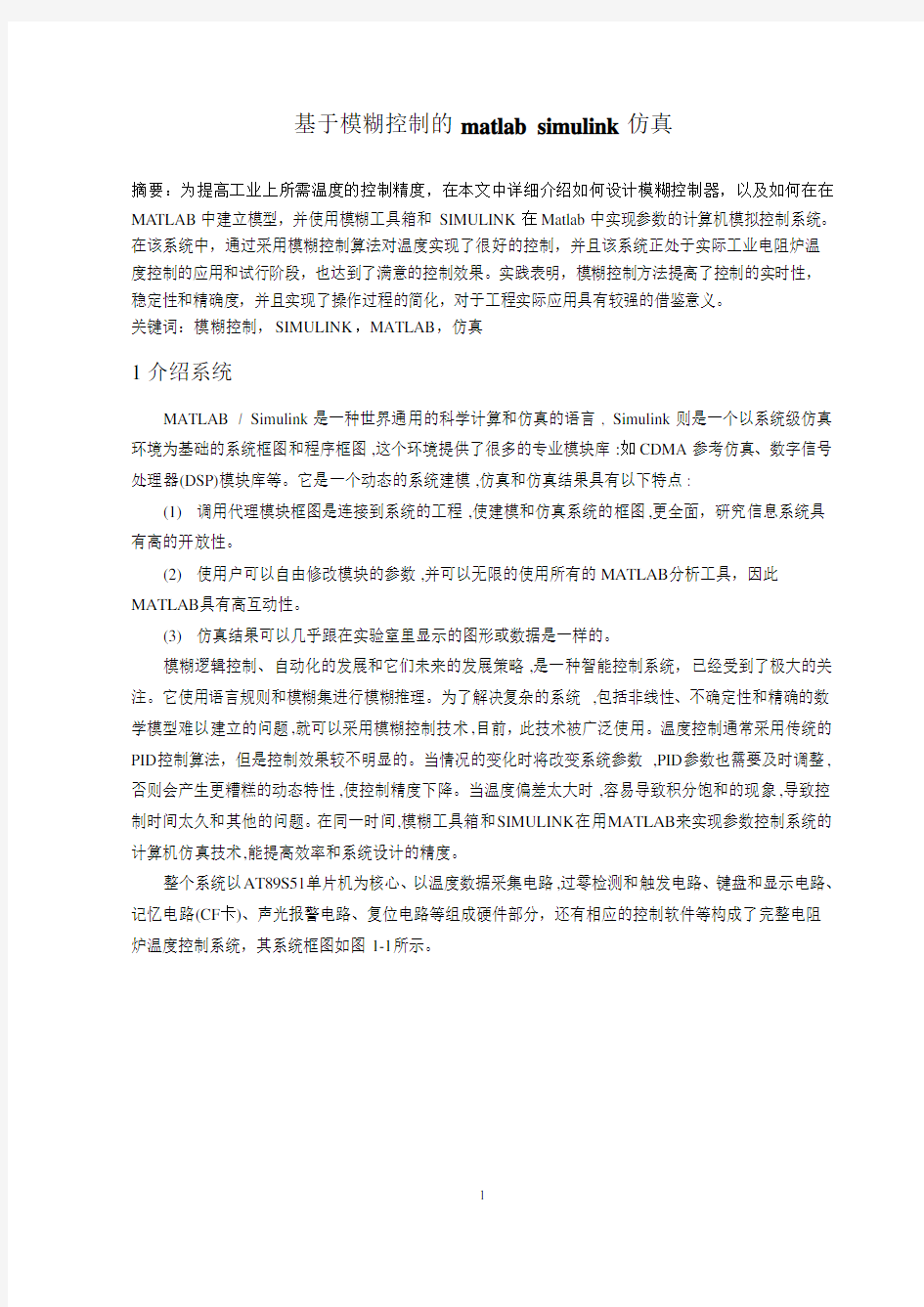
整个系统以AT89S51单片机为核心、以温度数据采集电路,过零检测和触发电路、键盘和显示电路、记忆电路(CF卡)、声光报警电路、复位电路等组成硬件部分,还有相应的控制软件等构成了完整电阻炉温度控制系统,其系统框图如图1-1所示。
图1-1 系统的框图
2 控制器设计
理论上,较高维度的模糊控制器,其控制精度也较高。但较高的维度会使控制算法也变得困难。目前广泛使用的非线性控制规律的二维模糊控制器有助于确保系统的稳定性,降低系统响应过程的超调量。模糊控制器的核心部分包括模糊化、模糊推理、反模糊化、知识库四个部分。
在工程实际应用中,二维模糊控制器的控制性能和控制复杂性较好,是目前较为广泛采用的一种形式。本文也设计一个二维模糊控制器,以温度的偏差e 和偏差的变化ec 作为输入量,其相应的语言变量为E 和EC ,输出量为PID 控制参数P K ,I K ,D K ,其相应的语言变量为P K ,I K ,D K .输入输出分别采用正态分布函数的隶属度。
首先将系统的输入温度以及炉温变化的精确量转化为模糊量,该过程称为模糊化,或称为模糊量化。模糊化的作用是把一个精确的输入变量通过定义在其论域上的隶属度函数计算出其属于各模糊集合的隶属度,从而将其转化为一个模糊变量。电阻炉模糊PID 控制器输入输出变量的模糊化分为以下几个步骤:
(l)论域的选择
通过分析炉温度变化的特点,选取误差。误差的基本论域为:{-50,50}设其量化论域为{3,3},则量化因子Ke=3/50=0.06。电阻炉炉温度变化速率为ec 的基本论域,取为:{一12,12},其量化论域为{-3,3},则量化因子 Kec=3/12=0.25。 (2)量化因子的选择
P K 的基本论域为{-0.3,0.3},其量化论域为{-0.3,0.3},则量化因子1。I K 的基本论域为{-0.06,
0.06},其量化论域为{-0.06,0.06},则量化因子l 。D K 的基本论域为{-3,3},其量化论域为{-3,3},则量化因子1
(3)确定隶属度函数
根据温度的控制的特性分别将输入和输出的三角形隶属度函数曲线,进行离散化处理,分别得到
温度偏差,偏差变化,P K ,I K ,D K 的各个模糊集合的隶属度函数表。E ,EC ,P K ,I K ,D K 的隶属度函数表,表2-1中值表示论域中的值对应每个模糊集的隶属度。
表2-1 E,EC 和Kp,Ki,Kd 的隶属度表
-3 -2 -1 0 1 2 3 NB 1.0 0.3 0 0 0 0 0 NM 0.3 1 0.3 0 0 0 0 NS 0 0.3 1 0.3 0 0 0 0 0 0 0.3 1 0.3 0 0 PS 0 0 0 0.3 1 0.3 0 PM 0 0 0 0 0.3 1 0.3 PB
0.3
1
模糊控制规则库由一系列“IF —THEN ”型的模糊条件句所构成。条件句的前提部分为输入和状态,而结论部分为控制变量。模糊控制规则是基于手动控制策略而建立的,而手动控制策略又是人们通过学习、试验以及长期经验积累逐渐形成的,存储在操作者或专家中的一种技术知识集合。模糊控制规则的生成大致有以下四种方法,即
①根据专家经验或过程控制知识生成模糊规则; ②根据过程模糊型生成控制规则;
③根据对手工控制操作的系统观察和测量生成控制规则; ④根据学习算法生成控制规则。
PID 参数模糊自整定是找出PID 三个参数与电阻炉温度偏差和温度偏差变化之间的模糊关系,在运行中通过不断检测温度偏差和计算偏差的变化,根据模糊控制原理来对3个参数进行在线修改,以满足不同温度设定和温度偏差及偏差变化时对控制参数的不同要求,从而使被控对象有良好的动、静态性能。从系统温度控制的稳定性、响应速度、超调量等各方面来考虑,P K ,I K ,D K 的作用如下:
①比例系数P K 的作用是加快系统的响应速度,提高系统的调节精度。P K 越大,系统的响应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统不稳定。P K 取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏。
②积分作用系数I K 的作用是消除系统的稳态误差。I K 越大,系统的静态误差消除越快,但I K 过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。若I K 过小,将使系统静态误差难以消除,影响系统的调节精度。
③微分作用系统D K 的作用是改善系统温度相应的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行进行提前预报。但D K 过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。
由以往的经验和温度控制的特殊性得知PID 控制P K ,I K ,D K 参数调整有如下的规律:
①当温度偏差|e|较大时,为了加快温度控制的响应速度,应取较大的P K 同时为了避免由于开始
时温度偏差e 的瞬时变大可能出现的微分过饱和而使控制作用超出许可的范围,导致超调的发生,应取较小的P K ,同时为了防止系统响应出现较大的超调,产生积分饱和,对积分作用加以限制,通常取P K =0即去掉积分作用。
②当温度偏差|e|和偏差变化|ec|处于中等大小时,为使系统响应具有较小的超调,P K 应取得小些,
I K 和D K 取值要适当,这时D K 的取值对系统响应的影响较大。
③当|e|较小即接近于设定值时,为使系统有良好的稳态性能,P K 和I K 均取大些。同时为了避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,一般是当|ec|较小时,D K 可大些;当|ec|较大时,D K 取小些。
④偏差变化量|ec|的物理意义是表明温度偏差变化的快慢速率,|ec|值越大, P K 的取值越小,I K 取值越大。
根据以上已有的PID 调节规律,结合本设计中实际电阻炉温度对象的控制特点,分别建立了如下针对△P K ,△I K ,△D K 三个参数整定的控制规则表,如表2-2,表2-3,表2-4所示。
表2-2 模糊变量△Kp 的模糊规则表
E EC
NB NM NS 0 PS PM PB NB PB PB PM PM PS 0 0 NM PB PB PM PS PS 0 NS NS PM PM PM PS 0 NS NS 0 PM PM PS 0 NS NM NM PS PS PS 0 NS NS NM NM PM PS 0 NS NM NM NM NB PB
NM
NM
NM
NB
NB
表2-3 模糊变量△Ki 的模糊规则表
E EC
NB NM NS 0 PS PM PB NB NB NB NM NM NS 0 0 NM NB NB NM NS NS 0 0 NS NB NM NS NS 0 PS PS 0 NM NM NS 0 PS PM PB PS NS NS 0 PS PS PM PB PM 0 0 PS PS PM PB PB PB
PS
PM
PM
PB
PB
表2-4 模糊变量△Kd 的模糊规则表
E EC
NB NM NS 0 PS PM PB NB PS NS NB NB NB NM PS NM PS NS NB NM NM NS 0 NS 0 NS NM NM NS NS 0 0 0 NS NS NS NS NS 0 PS 0 0 0 0 0 0 0 PM PB NS PS PS PS PS PB PB
PB
PM
PM
PM
PS
PS
PB
查询模糊控制表得到三个PID 控制参数的修正量即△Kp ,△Ki 和△Kd,则P K ,I K ,D K 参数按如下式计算。
Kd
Kd K Ki Ki K Kp Kp Kp 0D 0I 0?+=?+=?+= 上式中0Kp ,0Ki ,0Kd 是PID 控制器的原始值,一般根据现场调试由经验值设定。△Kp ,△Ki 和△Kd 为模糊控制器的输出值即PID 的修正量P K ,I K ,D K 为PID 实际控制量。
3 仿真结果
使用模糊控制器在Simulink 中构建整个控制系统,如下图所示
图3-1自适应模糊PID 控制系统仿真结构图
对应的仿真曲线结果如下面各图:
图3-2 自适应模糊PID控制系统的响应曲线
由上面个图看出性能指标:调节时间t s最大约为180s,超调量σ%=0,稳态误差e ss=0。
4 结论
本文介绍了模糊控制的电阻炉的温度控制系统,通过仿真表明,该模糊控制方法可提高系统的稳定性和准确性,并简化了操作过程。目前,该系统在工业应用的温度控制和试验阶段也已取得取得了较好效果。
5 参考文献
[1]潘新民, 王艳芳. 微机控制技术[M].北京:电子工业出版社。2003. 278-299
[2]唐向红,薛恒丽,郑雪峰.MATLAB在电子信息中的应用[M].北京:电子工业出版社,2006年版, 275-291.
[3]朱靓.模糊控制系统理论[M].北京:机械工业出版社,2005. 209-211。
[4]李颖,朱立波,张玮.基于SIMULINK的动态系统建模与仿真[M].西安:西安电子科技大学出版社,2004
Based On Fuzzy Controler On MATLAB Simulink Simulation
HE Jiall-jull,YU Shou-yi
(College of Information Science and Engineering,Central South UniverSity Changsha 410083 China)
Abstract:For improving the temperature control precision as the industry require. In this paper we introduce how to design Fuzzy controller in detail and how to make a model in MATLAB and use Fuzzy Toolbox and SIMULINK in MATLAB to realize the computer simulation of parameters control system. Using the algorithm of Fuzzy control in the system, the temperature was controlled in good state. At present, the system has been used in the phase of the application and the pilot of the resistance furnace temperature in the actual industrial and satisfying results were achieved. Practice shows that Fuzzy control method improves the leal—time performance、stability and accuracy of controlling and makes the operation simplified.The use for reference of the method was obviously in industrial application.
Keywords: Fuzzy Controler; MATLAB; SIMUL INK;simulation;
1 Introduction
MATLAB / Simulink is a universal language of scientific computing and simulation, and the establishment of MATLAB, Simulink is a system block diagram and block diagram-based system-level simulation environment, the environment provides a number of specialized modules library: such as CDMA Reference Blockset, DSP (Digital Signal Processor) module library and so on. It is a dynamic system modeling, simulation and analysis of simulation results package has the following characteristics:
(1) to invoke the preparation of the agent module to the module block diagram of the system is connected into, making the modeling and engineering simulation system block diagram of unified, more comprehensive research communication systems with high openness.
(2) allows the user to freely modify the module parameters, and can seamlessly use all the analysis tool MATLAB with high interactivity.
(3) simulation results can be almost "real time " to be displayed in graphical or data, which is the same laboratory.
Fuzzy logic control, automation development and the future strategy, in which great attention has been paid, is an Intelligent Control Department. It uses linguistic rules and fuzzy sets for fuzzy reasoning. In order to solve complex systems, including nonlinearity, uncertainty and accurate mathematical model is difficult to establish the problem, fuzzy control technology to become widely used. Temperature, often using the traditional PID control algorithm is less obvious: conditions change. Also will change the system parameters, PID parameters need to be adjusted, otherwise it would be worse dynamic characteristics, control accuracy decreased: the temperature deviation is large, prone to the phenomenon of integral saturation, resulting in
control for too long and so on. in the same Time, fuzzy toolbox and SIMULINK in MATLAB to achieve the parameter control system computer simulation, to promote efficiency and system design [2] for accuracy. The whole system mainly by the AT89S51 microcontroller, temperature data acquisition circuit, the zero crossing detection and trigger circuit, keyboard and display circuit, memory circuit (CF card), sound and light alarm circuit, reset circuit and the corresponding control software of several parts.
2 Controller Design
In practical engineering applications, the two-dimensional fuzzy controller has good control performance and complexity of control, this form is more widely used. This paper also designs a two-dimensional fuzzy controller, withing the temperature deviation e and the change of the deviation ec as input, the corresponding linguistic variables for E and EC, the output of PID control parameters P K ,I K ,D K . Its corresponding linguistic variables for P K ,I K ,D K . input and output by using normal distribution function of membership degree respectively
First changing to input temperature and furnace temperature system of gauged into fuzzy quantity, the process is called blurred, or called fuzzy quantification. V ague role is to put a precise input variables by defining the membership function on the theory of domain to calculate its belongs to the membership degree of fuzzy set, which is transformed into a fuzzy variables. Resistance furnace fuzzy PID controller input and output variables of the fuzzy classified as the following steps (1)The choice of the theory of domain
Through the analysis of the characteristic of furnace temperature, selecting error. Error of the basic theory of domain as: {- 50, 50}. Quantitative theory domain to {- 3, 3}, then the quantization factor Ke = 3/50 = 0.06. Resistance furnace temperature change rate to be the basic theory of ec domain as: {-12, 12} .the quantitative theory of domain for {- 3, 3}, the quantization factor Kec = 3/12 = 0.25. (2) quantitative factor selection
KP basic theory of domain for {0.3, 0.3}, the quantitative theory of domain for {0.3, 0.3}, the quantitative factor is 1. Ki basic theory of domain for {0.06, 0.06}, the quantitative theory of domain for {0.06, 0.06}, the quantization factor is l. Kd the basic theory of domain for {- 3, 3}, the quantitative theory of domain for {- 3, 3}, the quantitative factor is 1 (3) determining the membership function
According to the characteristics of temperature control, respectively, the input and output of the triangular membership function curve, discretization processing, temperature deviation value respectively, deviation rate, KP, ki, kd of each membership function of fuzzy set table. E, EC, KP, ki, kd membership function table, table in the theory of value in the domain values corresponding to each of the membership degree of fuzzy sets.
Table 2-1 The assignment table of Linguistic variable E,EC and Kp
Designing of fuzzy control rules
Fuzzy control rule base consists of a series of "IF THEN" a type of fuzzy conditional sentences. Part for input and state the premise of conditional sentences, and the conclusion part is the control variable. Fuzzy control rules are built based on manual control strategy, and manual control strategy is people through learning, experiment and experience gradually formed over a long period of time, stored in the operator or a collection of technical knowledge of experts. Of the fuzzy control rules generated to roughly the following four methods, namely
(1) according to the experience of the experts or process control knowledge to generate fuzzy rules;
(2) according to the process of the fuzzy model generated control rules;
(3) according to the observation and measurement of manual control operation system to generate control rules;
(4) according to the control rule learning algorithm.
Fuzzy PID parameters self-tuning is to find out the three parameters of PID and the resistance furnace temperature deviation and deviation, fuzzy relationship between temperature change in running through continuous test temperature deviation, and calculate the change of the deviation, according to the principle of fuzzy control to on-line modification of three parameters, in order to meet the different temperature setting and a change in temperature deviation and deviation of the different requirements of control parameters, so that the controlled object has a good dynamic and static performance. From the temperature control system of the stability, response speed, overshoot and steady state accuracy and so on various aspects to consider,,, the effect is as follows:
(1) the role of the proportional coefficient is to accelerate the response speed of system, improve the accuracy of the system. The faster, the greater the response speed of system, the system of regulation accuracy is higher, but prone to overshoot, and even lead to system instability. Value is too small, can reduce the accuracy, the response speed is slow, extending to adjust time, make the system static and dynamic characteristics of worse.
(2) the function of integral action coefficient is to eliminate the steady-state error of the system. The faster, the greater the system to eliminate static error, but is too big, in the early stages of the response process, produces the integral saturation phenomenon, leading to a larger overshoot in the process of response. If it is too small, will make the system difficult to eliminate static error, affect the adjustment precision of the system.
(3) the effect of derivative action system is to improve the system temperature corresponding dynamic characteristics, the main role is in the process of response inhibition the change of the deviation in any direction, to advance forecast deviation changes. But is too big, can make the response process of braking in advance, thus to extend the time of adjustment, but also reduce the anti-interference performance of the system.
Informed by the experience and the particularity of the temperature control of PID control KP, ki, kd parameter adjustment has the following rules:
(1) When the temperature deviation |e| is large, in order to speed up the response speed of the temperature control, should take a larger at the same time in order to avoid because of instantaneous temperature deviation e at the beginning of larger possible differential supersaturated and make the control effect beyond the range of permission, lead to overshoot, and should take smaller KP, at the same time to prevent the system response to appear larger overshoot, produce integral saturation, the integral action limits, KP = 0 that usually remove the integral action.
(2) When the temperature deviation |e| and the deviation change rate |ec| in medium size, to make the system response has smaller overshoot, KP should get smaller, ki and kd values should be appropriate, then the kd values have bigger influence on the system response.
(3) When |e| smaller is close to the set value, to make the system has good steady-state performance, KP and ki are larger. At the same time in order to avoid the system oscillation near the set point, and consider the anti-jamming performance of the system, usually when |ec| is smaller, kd is larger; When |ec| is bigger, kd get smaller.
(4)When |ec| deviation variation of physical meaning is that temperature deviation rate of speed, |ec| value, the greater the KP, the smaller the value of ki value.
According to the law more than the existing PID, combined with the design of the actual object of resistance furnace temperature control
Respectively, set up the following according to △P K ,△I K ,△D K three parameter setting of control rules table.
Table 2-2the fuzzy control rule of △Kp
Table 2-3the fuzzy control rule of △Ki
Table 2-4the fuzzy control rule of △Kd
Fuzzy control query table to get three of PID control parameter correction the △P K ,△I K ,△D K , Kp, Ki, Kd parameter press type calculation.
Kd
Kd K Ki Ki K Kp Kp Kp 0D 0I 0?+=?+=?+= On the type of Kp, Ki, Kd is the original value of the PID controller, general experience value according to the scene debugging is set. △P K ,△I K ,△D K for the output value of the fuzzy controller of PID correction Kp, Ki, Kd for PID control.
3 the results of simulation
Using the fuzzy controller in Simulink to build the whole control system, as shown in the figure below
Figure3-1 The adaptive fuzzy PID control system simulation diagram
The corresponding simulation curve results such as the following figure:
Figure 3-2 the response curve of the adaptive fuzzy PID control system
See from the above figure performance indicators: adjust time ts is about 180 s, most overshoot σ% = 0, steady-state error ess = 0.
4 Result and Conclusion
This paper introduces the fuzzy control of the resistance furnace with a temperature control system,practice shows that the fuzzy control method can improve the real-time control, stability and accuracy, and simplify the process of realization of the operation. Currently, the system is in practical industrial application of Temperature Control and the pilot phase. Achieved good results.
5 Rerences
[1] Pan Xinmin, Wang Yanfang. Micro-computer control technology [M]. Beijing: Electronic Industry Press.
2003.pp:278-299
[2]Xianghong Tang, Hengli Xue,Xuefeng Zheng, MA TLAB and application in the course of electronic
information, Beijing: Electronic Industry Press,2006,pp. 275-291.
[3] Zhu Jing. Fuzzy control theory and system theory [M]. Beijing: Mechanical Industry Press,
2005.pp:209-211.
[4]Ying Li,Boli Zhu,Wei Zhang,The modeling and simulation of dynamic system based on
SIMULINK,Xian:Xian University of Electronic Science & Technology Press,2004
模糊控制查询表的MATLAB 实现 叶高文(厦门海洋职业技术学院,福建厦门361012) MATLAB realization of Fuzzy Control Query Table 在运用模糊控制技术进行工业控制时,为了减少在线计算量,节省内存,提高PLC 等控制器的运行效率,通常根据隶属度函数和模糊控制规则表离线计算对应的模糊控制表,并将该表置于PLC 等控制器中,供实时控制时使用。在实时控制过程中,根据模糊量化后的偏差值e 和偏差变化率ec 直接查询控制表以获得模糊控制输出量,再转换为精确输出控制量。在实际的控制过程中由于微分作用的效果不是很明显,故很多实际情况中只采用PI 控制。本文论述的对象是常用PLC 的模糊PI 控制。不是PLC 的系统,可将积分时间转换为积分系数。 1模糊PI 控制模型说明 本文提供一个实际工业控制的模糊查询表的MATLAB 实 现过程,模糊PI 模型如图1。 图1模糊PI 控制器模型 如图1,模糊控制器的输入量采用实际被控制量与给定量的偏差e 和偏差变化率ec ,参数整定机构采用增量型调整原理,输出为比例系数增量ΔK P 和积分时间增量ΔTi ,再经式K P = K P0+ΔK P 和式T I =T I0+ΔTi 计算得到PI 控制器的比例系数KP 和积分时间值TI 。 2模型输入输出模糊控制规则表 2.1定义输入输出变量的隶属度矢量表 一般情况下,输入量偏差e 和偏差变化率△e 以及输出变量ΔKP 和ΔTi 的离散论域都设定为13个量化等级邀-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6妖。为方便MATLAB 编程,对相关的变量选择进行一些改变。原先的输入变量偏差e 和偏差变化率ec 的量化等级邀-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6妖改写为邀1,2,3,4,5,6,7,8,9,10,11,12,13妖。而输出变量ΔKP 和ΔTi 得量化等 级保持为邀-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6妖。 输入变量偏差e 和偏差变化率ec 和输出变量ΔKP 、ΔTi 的模糊语言值均为邀NB ,NM ,NS ,ZO ,PS ,PM ,PB妖。为了编程方便,将语言值用数字表示为邀1,2,3,4,5,6,7妖,与模糊语言值相对应,比如:模糊语言值NB 的模糊数字值为1,其他类似。根据以上的规定,产生用数字语言值表示输入变量x1及x2的隶属度矢量表,见表1所示。其中,变量x1表示模糊控制器的偏差输入e ,变量x2表示模糊控制器的偏差输入ec ;f1(i )、f2(j )表示第一输入x1和第二输入x2的隶属度,而i 、j 表示语言变量数字值,即为1,2,3,4…7。 表1用数字语言值表示输入变量x1及x2的隶属度矢量表 2.2模糊控制规则表 该控制系统为一实际工业控制模型,其用数字语言值表示的比例系数增量ΔKP 和积分时间ΔTI 模糊控制规则表如表2和表3所示。 表2 用数字语言值表示的ΔKP 模糊控制规则 摘 要 通过建立一个工业自动化控制中经常使用的模糊PI 控制器模型,详细论述了运用MATLAB 语言编写模糊控制查询表的方法,该控制表可以表格形式存放于计算机,从而大大提高了如PLC 等内存小的工业控制器的运行效率,也可实现在线推理控制。 关键词:模糊控制查询表,MATLAB ,PI 控制,在线推理 Abstract Through the establishmengt of Fuzzy-PI controller model which is applied in the industrial automation control,This pa-per describes in detail the way how to get a fuzzy -control-query table by the MATLAB programming.This cotrol-table may be stored in the compute with the form of a table,Which can improe greatly the operational efficiency,Such as PLC controller,etc.whose memory is very little,and on-line reasoning can also be realized. Keywords :fuzzy control query table,MATLAB,PI control,on-line reasoning 模糊控制查询表的MATLAB 实现 64
基于模糊控制的智能车寻迹算法研究 摘要:与传统的自动控制相比,模糊控制不用建立在被控对象准确的数学模型的基础上。这一特点在非常适用于实际运用中影响因素很多、结构十分复杂系统。其系统有易于接受,设计简单,维护方便,而且比常规控制系统稳定性好,鲁棒性高等特点。因其与本设计实际条件相似,所以选其做智能小车的寻迹算法研究。 关键词智能小车;模糊控制;寻迹算法 ABSTRACT Compared with the traditional automatic control,fuzzy control without based on a accurate mathematical model of controlled object. This feature is suitable for the systems which have many influencing factors and a very complex structure in the practical application. There are many feature in this system:such as easy to accept, the design is simple, convenient maintenance, more stability and robustness than conventional control system,and so on. Because it is similar to the actual conditions of our design, so we choose it for the smart car tracing algorithm. KEY WORDS smart car;fuzzy control;tracing algorithm
1998年的IEEE 国际会议上机器人及自动化 Leuven ,比利时1998年5月 一种实用的办法--带拖车移动机器人的反馈控制 F. Lamiraux and J.P. Laumond 拉斯,法国国家科学研究中心 法国图卢兹 {florent ,jpl}@laas.fr 摘要 本文提出了一种有效的方法来控制带拖车移动机器人。轨迹跟踪和路径跟踪这两个问题已经得到解决。接下来的问题是解决迭代轨迹跟踪。并且把扰动考虑到路径跟踪内。移动机器人Hilare的实验结果说明了我们方法的有效性。 1引言 过去的8年,人们对非完整系统的运动控制做了大量的工作。布洛基[2]提出了关于这种系统的一项具有挑战性的任务,配置的稳定性,证明它不能由一个简单的连续状态反馈。作为替代办法随时间变化的反馈[10,4,11,13,14,15,18]或间断反馈[3]也随之被提出。从[5]移动机器人的运动控制的一项调查可以看到。另一方面,非完整系统的轨迹跟踪不符合布洛基的条件,从而使其这一个任务更为轻松。许多著作也已经给出了移动机器人的特殊情况的这一问题[6,7,8,12,16]。 所有这些控制律都是工作在相同的假设下:系统的演变是完全已知和没有扰动使得系统偏离其轨迹。很少有文章在处理移动机器人的控制时考虑到扰动的运动学方程。但是[1]提出了一种有关稳定汽车的配置,有效的矢量控制扰动领域,并且建立在迭代轨迹跟踪的基础上。 存在的障碍使得达到规定路径的任务变得更加困难,因此在执行任务的任何动作之前都需要有一个路径规划。 在本文中,我们在迭代轨迹跟踪的基础上提出了一个健全的方案,使得带拖车的
机器人按照规定路径行走。该轨迹计算由规划的议案所描述[17],从而避免已经提交了输入的障碍物。在下面,我们将不会给出任何有关规划的发展,我们提及这个参考的细节。而且,我们认为,在某一特定轨迹的执行屈服于扰动。我们选择的这些扰动模型是非常简单,非常一般。它存在一些共同点[1]。 本文安排如下:第2节介绍我们的实验系统Hilare及其拖车:两个连接系统将被视为(图1)。第3节处理控制方案及分析的稳定性和鲁棒性。在第4节,我们介绍本实验结果。 图1带拖车的Hilare 2 系统描述 Hilare是一个有两个驱动轮的移动机器人。拖车是被挂在这个机器人上的,确定了两个不同的系统取决于连接设备:在系统A的拖车拴在机器人的车轮轴中心线上方(图1 ,顶端),而对系统B是栓在机器人的车轮轴中心线的后面(图1 ,底部)。A l= 0 。这个系统不过单从控制的角度来看,需要更对B来说是一种特殊情况,其中 r 多的复杂的计算。出于这个原因,我们分开处理挂接系统。两个马达能够控制机器人的线速度和角速度(v r,r ω)。除了这些速度之外,还由传感器测量,而机器人和拖车之间的角度?,由光学编码器给出。机器人的位置和方向(x r,y r,rθ)通过整合前的速度被计算。有了这些批注,控制系统B是:
一.模糊数学的基础知识 1.模糊集、隶属函数及模糊集的运算。 普通集合A,对,有或。 如果要进一步描述一个人属于年轻人的程度大小时,仅用特征函数就不够了。模糊集理论将普通集合的特征函数的值域推广到[0,1]闭区间内,取值的函数以度量这种程度的大小,这个函数(记为)称为集合的隶属函数。即对于每一个元素,有[0,1]内的一个数与之对应。 (1)模糊子集的定义:射给定论域U,U到[0,1]上的任一映射: 都确定了U上的一个模糊集合,简称为模糊子集。称为元素属于模糊集的隶属度。映射所表示的函数称为隶属函数。 例如:设论域U=[0,100],U上的老年人这个集合就是模糊集合: 若在集合U上定义了一个隶属函数,则称为模糊集。 (2)模糊集合的表示:,称为元素属于模糊集的隶 属度;则模糊集可以表示为:。 或,, (3)模糊集合的运算: ,, 并集: , 交集: , 补集:, 包含:, 2.模糊集的截集
已知U上模糊子集 对,则称为模糊集的-截集; 称为模糊集的-强截集;称为、的置信水平或阀值。 二.模糊数学的基本定理 1.模糊截积: 已知U上模糊子集 对,也是U上模糊集,其隶属函数为: ; 称为为与的模糊截积。 2.分解定理1:已知模糊子集,则 推论1:对 3.分解定理2:已知模糊子集,则 推论2:对 三.模糊关系与模糊聚类 1.模糊关系与模糊关系的合成 (1)模糊关系 普通集合的经典关系, 模糊关系:从U到V 上的一个模糊关系:,表示具有的关系程度,。(满足01)称为U 到V 上的一个模糊关系的模糊矩阵。 (2).设=和=为两个模糊矩阵,令
=,=1,2,…,,=1,2,…,。 则称矩阵=为模糊矩阵与的褶积,记为 =, 其中“”和“”的含义为 显然,两个模糊矩阵的褶积仍为模糊矩阵 2. 模糊等价矩阵及其矩阵 设方阵为以模糊矩阵,若满足 = 则称为模糊等价矩阵。 模糊等价矩阵可以反映模糊分类关系的传递性,即描述诸如“甲像乙,乙像丙,则甲像丙”这样的关系。 设=为一个模糊等价阵,01为一个给定的数,令 则称矩阵为的截阵 例如, = 为一个模糊等价阵,取0.4<,则 = 若取,则 =
模糊控制表推导过程
一、模糊划分及模糊化 对于偏差e的模糊划分取NB、NS、ZE、PS、 PB五个模糊量,并且在相邻的模糊量中,存 在如下关系: 1)、本模糊量的隶属度最大的元素,是相邻模 糊量的隶属度为0的元素。 2)、模糊量的形状是等腰三角形。 3)、论域为[-X,X]. 下图是隶属函数图象 NB NS 1 ZE PS PB -X -2X/3 -X/3 0 X/3 2X/3 X 图1 隶属函数图象 二、论域变换 1、偏差e的论域变换
偏差e的论域是[-X,X],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qe: qe=6/2X=3/X 显然,对于元素-X、-2X/3、-X/3、0、X/3、2X/3、X,则有相应的离散论域元素ei: e1=qe*(-X-0)=-3 e2=qe*(-2X/3-0)=-2 e3=qe*(-X/3-0)=-1 e4=qe*(0-0)=0 e5=qe*(X/3-0)=1 e6=qe*(2X/3-0)= 2 e7=qe*(X-0)=3 1、偏差变化率de的论域变换 偏差变化率de的论域是[-Y,Y],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qde: qde=6/2Y=3/Y 显然,对于元素-Y、-2Y/3、-Y/3、0、Y/3、2Y/3、Y,则有相应的离散论域元素dei:
de1=qde*(-Y-0)=-3 de2=qde*(-2Y/3-0)=-2 de3=qde*(-Y/3-0)=-1 de4=qde*(0-0)=0 de5=qde*(Y/3-0)=1 de6=qde*(2Y/3-0)= 2 de7=qde*(Y-0)=3 2、控制量C的论域变换 偏差C的论域是[-W,W],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qC: qC=6/2W=3/W 显然,对于元素-W、-2W/3、-W/3、0、W/3、2W/3、W,则有相应的离散论域元素Ci: C1=qC*(-W-0)=-3 C2=qC*(-2W/3-0)=-2 C3=qC*(-W/3-0)=-1 C4=qC*(0-0)=0 C5=qC*(W/3-0)=1 C6=qC*(2W/3-0)= 2
由于项目需要,需要模糊控制算法,之前此类知识为0,经过半个多月的研究,终于有的小进展。开始想从强大的互联网上搜点c代码来研究下,结果搜遍所有搜索引擎都搜不到,以下本人从修改的模糊控制代码,经过自己修改后可在 vc6.0,运行!输入e表示输出误差,ec表示误差变化率,经过测试具有很好的控制效果,对于非线性系统和数学模型难以建立的系统来说有更好的控制效果!现将其公开供大家学习研究! #include
译文 流体传动及控制技术已经成为工业自动化的重要技术,是机电一体化技术的核心组成之一。而电液比例控制是该门技术中最具生命力的一个分支。比例元件对介质清洁度要求不高,价廉,所提供的静、动态响应能够满足大部分工业领域的使用要求,在某些方面已经毫不逊色于伺服阀。比例控制技术具有广阔的工业应用前景。但目前在实际工程应用中使用电液比例阀构建闭环控制系统的还不多,其设计理论不够完善,有待进一步的探索,因此,对这种比例闭环控制系统的研究有重要的理论价值和实践意义。本论文以铜电解自动生产线中的主要设备——铣耳机作为研究对象,在分析铣耳机组各构成部件的基础上,首先重点分析了铣耳机的关键零件——铣刀的几何参数、结构及切削性能,并进行了实验。用电液比例方向节流阀、减压阀、直流直线测速传感器等元件设计了电液比例闭环速度控制系统,对铣耳机纵向进给装置的速度进行控制。论文对多个液压阀的复合作用作了理论上的深入分析,着重建立了带压差补偿型的电液比例闭环速度控制系统的数学模型,利用计算机工程软件,研究分析了系统及各个组成环节的静、动态性能,设计了合理的校正器,使设计系统性能更好地满足实际生产需要 水池拖车是做船舶性能试验的基本设备,其作用是拖曳船模或其他模型在试验水池中作匀速运动,以测量速度稳定后的船舶性能相关参数,达到预报和验证船型设计优劣的目的。由于拖车稳速精度直接影响到模型运动速度和试验结果的精度,因而必须配有高精度和抗扰性能良好的车速控制系统,以保证拖车运动的稳速精度。本文完成了对试验水池拖车全数字直流调速控制系统的设计和实现。本文对试验水池拖车工作原理进行了详细的介绍和分析,结合该控制系统性能指标要求,确定采用四台直流电机作为四台车轮的驱动电机。设计了电流环、转速环双闭环的直流调速控制方案,并且采用转矩主从控制模式有效的解决了拖车上四台直流驱动电机理论上的速度同步和负载平衡等问题。由于拖车要经常在轨道上做反复运动,拖动系统必须要采用可逆调速系统,论文中重点研究了逻辑无环流可逆调速系统。大型直流电机调速系统一般采用晶闸管整流技术来实现,本文给出了晶闸管整流装置和直流电机的数学模型,根据此模型分别完成了电流坏和转速环的设计和分析验证。针对该系统中的非线性、时变性和外界扰动等因素,本文将模糊控制和PI控制相结合,设计了模糊自整定PI控制器,并给出了模糊控制的查询表。本文在系统基本构成及工程实现中,介绍了西门子公司生产的SIMOREGDC Master 6RA70全数字直流调速装置,并设计了该调速装置的启动操作步骤及参数设置。完成了该系统的远程监控功能设计,大大方便和简化了对试验水池拖车的控制。对全数字直流调速控制系统进行了EMC设计,提高了系统的抗干扰能力。本文最后通过数字仿真得到了该系统在常规PI控制器和模糊自整定PI控制器下的控制效果,并给出了系统在现场调试运行时的试验结果波形。经过一段时间的试运行工作证明该系统工作良好,达到了预期的设计目的。 提升装置在工业中应用极为普遍,其动力机构多采用电液比例阀或电液伺服阀控制液压马达或液压缸,以阀控马达或阀控缸来实现上升、下降以及速度控制。电液比例控制和电液伺服控制投资成本较高,维护要求高,且提升过程中存在速度误差及抖动现象,影响了正常生产。为满足生产要求,提高生产效率,需要研究一种新的控制方法来解决这些不足。随着科学技术的飞速发展,计算机技术在液压领域中的应用促进了电液数字控制技术的产生和发展,也使液压元件的数字化成为液压技术发展的必然趋势。本文以铅电解残阳极洗涤生产线中的提升装置为研究
4模糊控制器的设计 4 Design of Fuzzy Controllor 4.1概述(Introduction) 随着PLC在自动控制领域内的广泛应用及被控对象的日趋复杂化,PLC控制软件的开发单纯依靠工程人员的经验显然是行不通的,而必须要有科学、有效的软件开发方法作为指导。因此,结合PLC可编程逻辑控制器的特点,应用最新控制理论、技术和方法,是进一步提高PLC软件开发效率及质量的重要途径。 系统设计的目标之一就是要提高装车的均匀性,车厢中煤位的高度变化直接影响装车的均匀性,装车不均匀对车轴有很大的隐患。要保持高度值不变就必须不断的调整溜槽的角度,但是,在装车过程中,煤位的高度和溜槽角度之间无法建立精确的数学模型。模糊控制它最大的特点是[43-45]:不需建立控制对象精确数学模型,只需要将操作人员的经验总结描述成计算机语言即可,因此采用模糊控制思想实现均匀装车是行之有效的方法。虽然很多PLC生产厂家推出FZ模糊推理模块,但这些专用模块价格昂贵,需使用专门的编程设备,成本高通用性差,所以自主开发基于模糊控制理论的PLC控制器有很大的工程价值。 本章首先介绍了模糊控制的基本原理、模糊控制系统及模糊控制器的设计步骤;然后在对煤位高度控制系统分析的基础上,设计基于模糊理论的PLC控制,分别从查询表计算生成和PLC程序查询两个部分进行设计。 4.2模糊控制原理(Fuzzy Control Principle) 4.2.1模糊控制理论(Fuzzy Control Theory) 模糊控制理论是由美国加利福尼亚大学的自动控制理论专家L.A.Zadch教授首次提出,由英国的Mamdani首次用于工业控制的一种智能控制技术[46]。模糊控制(FUZZY)技术是一种由数学模型、计算机、人工智能、知识工程等多门科学领域相互渗透、理论性很强的科学技术。 模糊控制是以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的数学工具,用计算机来实现的一中计算机智能控制[47-48]。它的基本思想是:把人类专家对待特定的被控对象或过程的控制策略总结成一系列以“IF…THEN…”形式表示的控制规则,通过模糊推理得到控制作用集,作用与被控对象或过程。与传统的控制方法相比,它具有以下优点[48]:无需知道被控对象的数学模型;是一种反映人类智慧思维的智能控制;易被人们所接受;构造容易;鲁棒性好。
模糊控制的基本原理 模糊控制是以模糊集合理论、模糊语言及模糊逻辑为基础的控制,它是 模糊数学在控制系统中的应用,是一种非线性智能控制。 模糊控制是利用人的知识对控制对象进行控制的一种方法,通常用“if条件,then结果”的形式来表现,所以又通俗地称为语言控制。一般用于无法以 严密的数学表示的控制对象模型,即可利用人(熟练专家)的经验和知识来很好 地控制。因此,利用人的智力,模糊地进行系统控制的方法就是模糊控制。模 糊控制的基本原理如图所示: 模糊控制系统原理框图 它的核心部分为模糊控制器。模糊控制器的控制规律由计算机的程序实现,实现一步模糊控制算法的过程是:微机采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E;一般选误差信号E作为模糊控制器的一个输入量,把E的精确量进行模糊量化变成模糊量,误差E的模糊量可用相应的模糊语言表示;从而得到误差E的模糊语言集合的一个子集e(e实际上是一个模糊向量); 再由e和模糊控制规则R(模糊关系)根据推理的合成规则进行模糊决策,得到模糊控制量u为: 式中u为一个模糊量;为了对被控对象施加精确的控制,还需要将模糊量u 进行非模糊化处理转换为精确量:得到精确数字量后,经数模转换变为精确的模拟量送给执行机构,对被控对象进行一步控制;然后,进行第二次采样,完成第二步控制……。这样循环下去,就实现了被控对象的模糊控制。 模糊控制(Fuzzy Control)是以模糊集合理论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制。模糊控制同常规的控制方案相比,主要特点有: (1)模糊控制只要求掌握现场操作人员或有关专家的经验、知识或操作数据,不需要建立过程的数学模型,所以适用于不易获得精确数学模型的被控过程,或结构参数不很清楚等场合。 (2)模糊控制是一种语言变量控制器,其控制规则只用语言变量的形式定性的表达,不用传递函数与状态方程,只要对人们的经验加以总结,进而从中提炼出规则,直接给出语言变量,再应用推理方法进行观察与控制。 (3)系统的鲁棒性强,尤其适用于时变、非线性、时延系统的控制。 (4)从不同的观点出发,可以设计不同的目标函数,其语言控制规则分别是独立的,但是整个系统的设计可得到总体的协调控制。 它是处理推理系统和控制系统中不精确和不确定性问题的一种有效方法,同时也构成了智能控制的重要组成部分。 模糊控制器的组成框图主要分为三部分:精确量的模糊化,规则库模糊推理,
一、速度控制算法: 首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec (i )= e (k )- e (k-1)≤20,阀值e swith =10km/h 设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e (k )<0 ① e (k )>- e swith and throttlr_1≠0 选择油门控制 ② 否则:先将油门控制量置0,再选择刹车控制 0 模糊控制算法的研究 0842812128夏中宇 模糊控制概述 “模糊”是人类感知万物,获取知识,思维推理,决策实施的重要特征。“模糊”比“清晰”所拥有的信息容量更大,内涵更丰富,更符合客观世界。 在日常生活中,人们的思维中有许多模糊的概念,如大、小、冷、热等,都没有明确的内涵和外延,只能用模糊集合来描述。人们常用的经验规则都是用模糊条件语句表达,例如,当我们拧开水阀往水桶里注水时,有这样的经验:桶里没水或水较少时,应开大水阀;桶里水较多时,应将水阀关小些;当水桶里水快满时,则应把阀门关得很小;而水桶里水满时应迅速关掉水阀。其中,“较少”、“较多”、“小一些”、“很小”等,这些表示水位和控制阀门动作的概念都具有模糊性。即有经验的操作人员的控制规则具有相当的模糊性。模糊控制就是利用计算机模拟人的思维方式,按照人的操作规则进行控制,实现人的控制经验。 模糊控制理论是由美国著名的学者加利福尼亚大学教授Zadeh·L·A于1965年首先提出,它以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策略。 1974年,英国伦敦大学教授Mamdani·E·H研制成功第一个模糊控制器,充分展示了模糊技术的应用前景。 模糊控制概况 模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。1965年,美国的L.A.Zadeh 创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。1974年,英国的E.H.Mamdani首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功。这一开拓性的工作标志着模糊控制论的诞生。 模糊控制实质上是一种非线性控制,从属于智能控制的范畴。模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是在日本,却得到了迅速而广泛的推广应用。近20多年来,模糊控制不论从理论上还是技术上都有了长足的进步,成为自动控制领域中一个非常活跃而又硕果累累的分支。其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等。 模糊控制的基本理论 所谓模糊控制,就是在控制方法上应用模糊集理论、模糊语言变量及模糊逻辑推理的知识来模拟人的模糊思维方法,用计算机实现与操作者相同的控制。该理论以模糊集合、模糊语言变量和模糊逻辑为基础,用比较简单的数学形式直接将人的判断、思维过程表达出来,从而逐渐得到了广泛应用。应用领域包括图像识别、自动机理论、语言研究、控制论以及信号处理等方面。在自动控制领域,以模糊集理论为基础发展起来的模糊控制为将人的控制经验及推理过程纳入自动控制提供了一条便捷途径。 1.知识库 基于模糊控制的matlab simulink仿真 摘要:为提高工业上所需温度的控制精度,在本文中详细介绍如何设计模糊控制器,以及如何在在MA TLAB中建立模型,并使用模糊工具箱和SIMULINK在Matlab中实现参数的计算机模拟控制系统。在该系统中,通过采用模糊控制算法对温度实现了很好的控制,并且该系统正处于实际工业电阻炉温度控制的应用和试行阶段,也达到了满意的控制效果。实践表明,模糊控制方法提高了控制的实时性,稳定性和精确度,并且实现了操作过程的简化,对于工程实际应用具有较强的借鉴意义。 关键词:模糊控制,SIMULINK,MATLAB,仿真 1介绍系统 MATLAB / Simulink是一种世界通用的科学计算和仿真的语言, Simulink则是一个以系统级仿真环境为基础的系统框图和程序框图,这个环境提供了很多的专业模块库:如CDMA参考仿真、数字信号处理器(DSP)模块库等。它是一个动态的系统建模,仿真和仿真结果具有以下特点: (1)调用代理模块框图是连接到系统的工程,使建模和仿真系统的框图,更全面,研究信息系统具有高的开放性。 (2)使用户可以自由修改模块的参数,并可以无限的使用所有的MATLAB分析工具,因此MATLAB具有高互动性。 (3)仿真结果可以几乎跟在实验室里显示的图形或数据是一样的。 模糊逻辑控制、自动化的发展和它们未来的发展策略,是一种智能控制系统,已经受到了极大的关注。它使用语言规则和模糊集进行模糊推理。为了解决复杂的系统,包括非线性、不确定性和精确的数学模型难以建立的问题,就可以采用模糊控制技术,目前,此技术被广泛使用。温度控制通常采用传统的PID控制算法,但是控制效果较不明显的。当情况的变化时将改变系统参数,PID参数也需要及时调整,否则会产生更糟糕的动态特性,使控制精度下降。当温度偏差太大时,容易导致积分饱和的现象,导致控制时间太久和其他的问题。在同一时间,模糊工具箱和SIMULINK在用MATLAB来实现参数控制系统的计算机仿真技术,能提高效率和系统设计的精度。 整个系统以AT89S51单片机为核心、以温度数据采集电路,过零检测和触发电路、键盘和显示电路、记忆电路(CF卡)、声光报警电路、复位电路等组成硬件部分,还有相应的控制软件等构成了完整电阻炉温度控制系统,其系统框图如图1-1所示。 管理学基本知识 内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128) 管理科学 管理科学是研究管理理论、方法和管理实践活动的一般规律的科学。管理科学的初创阶段,始于19世纪末至20世纪初。首先,由美国工程师费雷德里克·泰罗创造出"标准劳动方法"和劳动定额,被称为"泰罗制",并于1911年发表了他的代表作《科学管理原理》,泰罗被誉为"科学管理之父"。与"科学管理理论"同期问世的还有法约尔的"管理过程理论"和韦伯的"行政组织理论。"这三种理论统称为"古典管理理论。" 管理的概念:一个组织有计划、组织、领导、控制、对资源进行合理配置和使用以实现目标的过程,就叫管理。 管理科学的第二个里程碑是""。它产生于本世纪20年代,创始人是美国哈佛大学教授乔治·奥尔顿·梅奥和茨·罗特利斯伯格等。后来,行为科学在其发展过程中,又形成一些新的理论分支。现代管理理论是以"系统理论"、""、"管理科学理论"等学派为代表,其特点是以、、为其理论基础,模型和手段来研究解决各种管理问题。 管理学的分类 管理学是一门多分枝的学科体系.按照不同的研究对象,管理学细分为很多分枝学科。按照教育部学科分类目录,管理学下设管理科学与工程(可授管理学、工学学位), 工商管理(会计学,企业管理,财务管理、市场营销、人力资源管理,旅游管理,技术经济及管理), 农林经济管理(农业经济管理,林业经济管理) 公共管理(行政管理,社会医学与卫生事业管理,教育经济与管理,社会保障,土地资源管理(图书馆、情报与档案管理,图书馆学,情报学,档案学)。 我国着名学者提出了中国管理科学“三个基础,三个层次和三个领域”的学科结构理论。即 三个基础 三个基础是数学、经济学和心理学.数学是管理科学中数量分析方法的基础,最常使用的是统计学(包括数理统计、回归分析、非参数统计等)、组合数学(主要研究存在性、计数、优化等问题)、数学规划(包括线性规划、非线性规划、整数规划、动态规划、目标规划等)、随机过程、离散数学及模糊数学等。 经济学是管理科学中各类决策的出发点和依归,最常使用的是理论经济学(主要包括微观经济学和宏观经济学)、应用经济学(例如工业经济学、劳动经济学、区域经济学、国际经济学等)及计量经济学等。 心理学是研究人的心理活动和行为表现的科学,它是管理科学中研究人际关系、调动人的积极性的依据。最常使用的是工业心理学、社会心理学及认知心理学等。 三个层次 三个层次是基础管理、职能管理和战略管理。 基础管理是管理中带有共性的基础理论和基本技术,主要包括管理数学、管理经济学、管理心理学、管理会计学、管理组织学、管理决策学、管理史学,等等。职能管理是将管理基础与特定的管理职能相结合,例如计划管理、财务管理、人事管理、生产管理、营销管理、科技管理、国际贸易管理,公共行政管理,等等。 非线性系统模糊控制算法研究 摘要:随着社会科技的进步,系统自动化越来越强,而要强化系统的自动化,就需要对系统控制进行深入的研究。系统控制是我国目前科学研究的一个重要方向,通过基本结构的建立和仿真实验,控制分析的深度会有明显的增加。在系统控制当中,非线性系统的模糊控制是一项重要的内容,通过对此中控制的算法进行分析和研究,可以提供非线性系统模糊控制的有效性。该文就非线性系统控制算法进行研究,旨在分析此系统算法的应用优势,从而强化其在实践中的应用水平。 关键词:非线性系统模糊控制算法研究 中图分类号:TP273.4 文献标识码:A 文章编号:1672-3791(2017)04(c)-0196-02 在控制研究中,比较典型的基于受控对象精确模型的控制是古典控制和状态空间模型控制。在实际研究中发现,除去受控对象比较精确的控制外,还存在比较复杂的控制,这种控制的受控对象不明确,所以数学模型的建立相对困难。为了对这种控制进行有效的利用,采用模糊控制算法进行数学模型的建立是主要的方法。因此,积极的对非线性系统模糊控制算法进行研究意义重大。 1 模糊控制的数学描述 模糊控制是控制研究中的重要类别,这种控制不仅是一种实时控制,而且不依赖于受控对象的精确模型,所以说它是一种打破了传统束缚的新型计算机控制。此种控制的产生为解决更加复杂的计算机问题带来了全新的方法。从特征上来看,此种方法对于模型的要求比较低,而且在实际利用中的计算非常简便,控制性能也比较优良。该文在非线性系统中进行模糊控制算法的研究,为了使得研究简便,利用了一个非线性系统的式子: 在这个式子当中,u表示的是输入量,而y则表示输出量,整个式子代表是就是工程实际当中难于建模的一大类复杂受控对象。根据这个式子,确定合适的参考轨迹,控制公式便可以得到书写。 2 模糊控制的算法原理 模糊控制的算法原理是研究的重点内容,在实际分析的过程中主要包括了四个方面:第一是进行非线性系统的模糊模型建立,然后对其进行规范化,使其转变为参数辨识问题。比如在考虑一个SISO非线性系统的时候,将系统的输入空间和输出空间按照精度进行分别的量化,那么系统的特性便会转变为一个特定的公式,整个公式反应了系统的条件,也构成了系统的模糊模型。第二是对模型的在线递推进行修正。为了使得整个控制测算更加的精确,利用全新的信息结 LED点阵显示屏中英文对照外文翻译文献(文档含英文原文和中文翻译) 译文: 基于AT89C52单片机的LED显示屏控制系统的设计 摘要这篇文章介绍了基于AT89C52单片机的LED点阵显示屏的软件和硬件开发过程。使用一个简单的外部电路来控制像素是32×192的显示屏。用动态扫描,显示屏可以显示6个32×32的点阵汉字。显示屏也可以分为两个小的显示屏,它可以显示24个像素是16×16的汉字。可以通过修改代码来改变显示的内容和字符的滚动功能,而且可以根据需要调整字符的滚速或者暂停滚动。中文字符代码存储在外部存储寄存器中,内存的大小由需要显示的汉字个数决定。这种显示屏具有体积小,硬件和电路结构简单的优点。 关键词发光二极管汉字显示AT89C52单片机 1.导言 随着LED显示屏不断改善和美化人们的生活环境,LED显示屏已经成为城市明亮化,现代化、信息化的一项重要标志。在大的购物商场,火车站,码头,地铁,大量的管理窗口等,我们经常可以看到LED灯光。LED商业已成为一个快速增长的新产业,拥有巨大的市场空间和光明前景。文章,图片,动画和视频通过LED发光显示,并且内容可以变换。一些显示设备的模块化结构,通常有显示模块,控制系统和电源系统。显示模块是由LED管组成的点阵结构,进行发光显示,可以显示文章,图片,视频等。控制系统可以控制区域里LED的亮灭,电源系统为显示屏提供电压和电流。用电脑,取出字符字节,传送到微控制器,然后送到LED点阵显示屏上进行显示,很多室内和室外显示屏都是通过这个方法进行显示的。按显示的内容区分,LED点阵屏的显示可分为图形显示、图片显示和视频显示三个部分。与图片显示屏比较,不管是单色或者彩色的图形显示屏,都没有灰色色差,所以,图形显示不能反映丰富的色彩。视频显示屏不但可以显示运动、清楚和全彩的图像,也可以显示电视和计算机信号。虽然三者 《智能控制》 课程设计报告 专业:自动化 班级:学号: 学生: 时间:13年12月30日~13年1月3日 ―――――――以下指导教师填写――――― 分项成绩:出勤设计报告 总成绩: 指导教师: 设计报告要求和成绩评定 1 报告容 设计任务书(设计计划),正文,参考资料。 设计任务书(设计计划)由学生所在系安排指导教师编写,容包括设计地点、时间、安排和设计容和要求等。 正文容一般包括:(1)设计简述(设计时间、设计地点,设计方式等);(2)设计容叙述;(3)设计成品(图纸、表格或计算结果等);(4)设计小结和建议。 参考资料包括参考书和现场技术资料等。 2 书写用纸 A4复印纸;封面、设计任务书要求双面打印。 3 书写要求 正文容手工双面或单面书写,字迹清楚,每页20行左右,每行30字左右,排列整齐;页码居中写在页面下方;纸面上下左右4侧边距均为2厘米。 公式单占一行居中书写;插图要有图号和图题,图号和图题书写在插图下方;表格要有表号和表题,表号和表题在表格上方书写;物理量单位和符号、参考文献引用和书写以及图纸绘制要符合有关标准规定;有关细节可参考我院《毕业设计成品规》。 4 装订 装订顺序:封面,设计任务书,正文及参考资料,封底;左边为装订边,三钉装订,中间钉反向装订。 5 成绩评定 设计成绩一般由出勤(10分)、报告书写规性及成品质量(50分)、考核(40分)三部分成绩合成后折合为优秀(90-100分)、良好(80-89分)、中(70-79分)、及格(60-69分)或不及格(60分以下)。设计考核可采取笔试、机试或其它合适的方式;不参加考核或不交报告者成绩为零分。 CONTROL, PID CONTROL, AND ADVANCED FUZZY CONTROL FOR SIMULATING A NUCLEAR REACTOR OPERATION XIAOZHONG LI and DA RUAN* elgian Nuclear Research Centre (SCKoCEN Boeretang 200, 8-2400 Mol, Belgium (Received 15 March 1999) Based on the background of fuzzy control applications to the first nuclear reactor in Belgium (BRI) at the Belgian Nuclear Research Centre (SCK.CEN), we have made a real fuzzy logic control demo model. The demo model is suitable for us to test and com- pare some new algorithms of fuzzy control and intelligent systems, which is advantageous because it is always difficult and time-consuming, due to safety aspects, to do all experiments in a real nuclear environment. In this paper, we first report briefly on the construction of the demo model, and then introduce the results of a fuzzy control, a proportional-integral-derivative (PID) control and an advanced fuzzy control, in which the advanced fuzzy control is a fuzzy control with an adaptive function that can Self-regulate the fuzzy control rules. Afterwards, we present a comparative study of those three methods. The results have shown that fuzzy control has more advantages in terms of flexibility, robustness, and easily updated facilities with respect to the PID control of the demo model, but that PID control has much higher regulation resolution due to its integration term. The adaptive fuzzy control can dynamically adjust the rule base, therefore it is more robust and suitable to those very uncertain occasions. Keywords: Fuzzy control; PID control; fuzzy adaptive control; nuclear reactor I INTRODUCTION Today the techniques of fuzzy logic control are very mature in most engineering areas, but not in nuclear engineering, though some research has been done (Bernard, 1988; Hah and Lee, 1994; Lin et al. 1997; Matsuoka, 1990). The main reason is that it is impossible to do experiments in nuclear engineering as easily as in other industrial areas. For example, a reactor is usually not available to any individual. Even for specialists in nuclear engineering, an official licence for doing any on-line test is necessary. That is why we are still模糊控制算法的研究
模糊控制外文翻译
管理学基本知识
非线性系统模糊控制算法研究
LED点阵显示屏中英文对照外文翻译文献
模糊控制算法研究报告
模糊控制 英文文献
相关主题
文本预览