高精度测温电路
- 格式:docx
- 大小:222.34 KB
- 文档页数:9
论述提高红外测温精度的温度补偿方法1 引言温度是表征物质状态的主要参数之一。
目前,测温方法主要分为接触式测温与非接触式测温。
后者主要以红外测温为主。
由于是非接触测温,故测温结果受到中间介质的影响比较大,当距离超过一定范围时,红外测温仪的测温精度将会降低,从而导致测量值不准确。
红外辐射在大气传播过程中,不可避免地要受到各种因素的干扰。
目前提高测温精度的方法主要通过搭建特定的测温系统和传感器后级补偿电路来实现,比如仪器内部的温度漂移和增益补偿、镜头视场外的辐射补偿以及不同季节下的操作温度补偿。
但此方法存在可变性差,只有在标称环境下使用才能达到较高精度的缺点。
进行温度补偿时,补偿公式与系统本身参数有关,导致补偿方法复杂难懂,适用条件苛刻,实用性不强。
为此,作者通过对影响红外测温精度的因素、红外辐射的基本原理进行分析和试验研究,提出了一种新的温度补偿方法。
通过实验,将所测温度与被测目标的真实参考温度做对比分析,并在不同的测温距离下,利用补偿公式得到一个相应的温度差值,使测温仪的精度得到提高。
相比目前的温度补偿方法,该方法具有简单易懂,应用方便,且不需要知道测量仪器的详细参数的优点,这对于工业测温应用领域获取设备运行精确温度参数具有重要意义。
2 红外测温原理自然界中任何高于绝对零度的物体都会向外界辐射红外电磁波。
通过对物体红外辐射能量的测量,来确定其表面温度,这就是红外测温仪测温的理论基础。
1900年,普朗克提出了黑体辐射量子假设后,利用谐振子能量分布应该满足麦克斯韦-波尔兹曼统计,求得普适函数表示如下,用波长可表示如下:(4)式(4)表示大气介质中辐射电磁波的衰减遵循指数衰减规律,称为波尔盖定律。
在接近地面的大气中,对红外辐射吸收起到了主导作用的是水蒸气和二氧化碳。
3.2 环境对红外辐射的散射作用当红外辐射在大气中传播时,大气分子会引起辐射散射。
散射可以看做是光子与大气分子发生弹性碰撞,改变了辐射方向,使得本应进入测量系统的能量并没有被吸收,从而造成误差。
常见热电阻测量电路的分析与比较摘要:在工业生产现场中,热电阻是一种重要的测量传感器,需要通过导线将测量信号传递到控制系统中,因此本文通过分析比较三种常见的接线方式,来说明导线对热电阻测量电路的影响。
关键词:接线方式;二线制;三线制;四线制一、背景介绍随着社会的发展,工业技术也不断进步。
在很多工业领域中,热电阻是一种将温度变化转化为电阻值变化的一次元件,在工业生产现场中,需要通过导线将电阻值信号传递到计算机控制系统中或其他仪表上。
由于其安装地与控制地存在一定的物理距离,不能忽视热电阻引线对其测量结果产生的较大影响,因此研究热电阻的接线方式具有重要意义。
二、常见测量电路的分析目前在生产中,常见的热电阻测量电路接线方式主要有三种:二线制、三线制和四线制。
这三种接线方式由于自身的优缺点应用于不同的场合,接下来将详细介绍这三种接线方式。
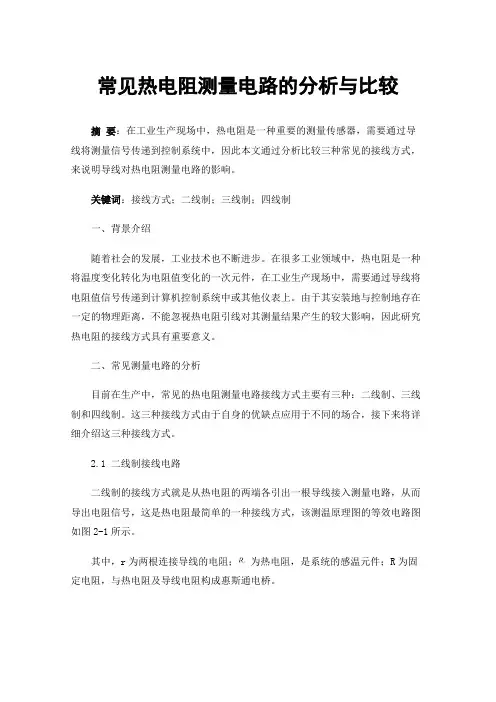
2.1 二线制接线电路二线制的接线方式就是从热电阻的两端各引出一根导线接入测量电路,从而导出电阻信号,这是热电阻最简单的一种接线方式,该测温原理图的等效电路图如图2-1所示。
其中,r为两根连接导线的电阻;为热电阻,是系统的感温元件;R为固定电阻,与热电阻及导线电阻构成惠斯通电桥。
图2-1 热电阻二线制等效电路图根据等效电路可以得出,显示仪表两端的电压:式2-1根据式2-1得出:式2-2在上式2-2中,R为测量电路中的已知量,可测量得出,因此,测量的距离较短或者在测量精度要求不高时,可以将导线电阻r忽略,视为r=0。
这时就可得出:式2-3采用二线制时,其一,并没有考虑导线电阻,但现实中导线电阻必然存在,导致较大的误差;其二,若采用这种电路进行精密温度测量,整个电路还必须在使用温度范围内。
因此这种接线方式只适合用于测量精度要求较低、传送距离较短的情况。
2.2 三线制接线电路三线制的接线方式是将一根导线从热电阻的根部引出,接到电桥的电源端;从另外一端引出两根导线,这两根导线分别接到热电阻所在的桥臂以及与其相邻的电桥桥臂上,等效电路图如图2-2所示。
热电偶温度ic全文共四篇示例,供读者参考第一篇示例:热电偶温度IC是一种用于测量温度的集成电路,它通过利用热电偶的热电效应将温度转换为电压信号,然后通过内部电路进行放大和处理,最终输出一个精确的数字温度值。
热电偶温度IC广泛应用在各种工业领域,如化工、冶金、医疗、食品等,其精准度和稳定性受到了广泛的认可。
热电偶是一种由两种不同金属线组成的传感器,当两种金属处于不同温度时,就会产生一个微小的电压信号。
热电偶的工作原理是基于塞贝克效应,即当两种金属的接触点处于不同温度时,会在接触点产生一个电动势。
热电偶温度IC通常包括一个热电偶传感器、一个放大器、一个模数转换器和一个数字信号处理单元。
热电偶传感器将温度转换为电压信号,放大器将电压信号放大到合适的范围,模数转换器将模拟信号转换为数字信号,数字信号处理单元进行数据处理和输出。
热电偶温度IC的优点之一是其精准度高,可以达到0.1°C的精度。
这种高精度使其在一些对温度要求苛刻的应用中得到广泛应用,比如医疗领域的体温测量、食品加工中的温度控制等。
热电偶温度IC还具有反应速度快、抗干扰能力强、体积小、功耗低等优点。
这些优点使得热电偶温度IC在工业自动化领域得到了广泛应用,能够满足各种复杂环境下的温度测量需求。
在选择热电偶温度IC时,需要考虑其测量范围、精确度、反应速度、抗干扰能力、封装形式等因素。
不同的应用场景需要不同的性能指标,因此在选择热电偶温度IC时需要根据实际需求进行综合考虑。
第二篇示例:热电偶温度IC(Integrated Circuit)是一种用于测量和控制温度的智能设备,它由热电偶传感器和集成电路组成,能够实现高精度的温度测量和信号处理。
热电偶是一种利用两种不同金属导体连接而成的传感器,通过测量两种导体之间的温差来获取环境温度信息。
热电偶因其简单、稳定和精准的特点被广泛应用于工业自动化、航空航天、医疗仪器、电力电气等领域。
在传统的热电偶温度测量中,需要将热电偶的信号传输至数据采集设备进行处理,这样会增加传输带来的误差和干扰。
热电阻热电阻是中低温区最常用的一种温度检测器。
它的主要特点是测量精度高,性能稳定。
其中铂热是阻的测量精确度是最高的,它不仅广泛应用于工业测温,而且被制成标准的基准仪。
金属热电阻的感温元件有石英套管十字骨架结构,麻花骨架结构得杆式结构等。
金属热电阻常用的感温材料种类较多,最常用的是铂丝。
工业测量用金属热电阻材料除铂丝外,还有铜、镍、铁、铁—镍、钨、银等。
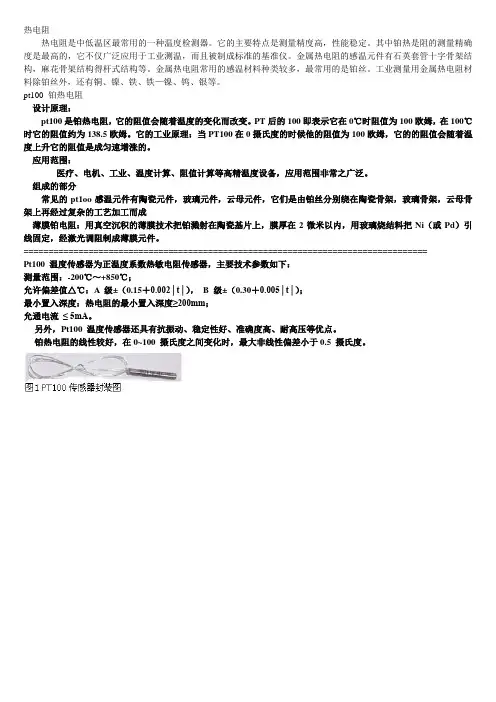
pt100 铂热电阻设计原理:pt100是铂热电阻,它的阻值会随着温度的变化而改变。
PT后的100即表示它在0℃时阻值为100欧姆,在100℃时它的阻值约为138.5欧姆。
它的工业原理:当PT100在0摄氏度的时候他的阻值为100欧姆,它的的阻值会随着温度上升它的阻值是成匀速增涨的。
应用范围:医疗、电机、工业、温度计算、阻值计算等高精温度设备,应用范围非常之广泛。
组成的部分常见的pt1oo感温元件有陶瓷元件,玻璃元件,云母元件,它们是由铂丝分别绕在陶瓷骨架,玻璃骨架,云母骨架上再经过复杂的工艺加工而成薄膜铂电阻:用真空沉积的薄膜技术把铂溅射在陶瓷基片上,膜厚在2微米以内,用玻璃烧结料把Ni(或Pd)引线固定,经激光调阻制成薄膜元件。
=================================================================================Pt100 温度传感器为正温度系数热敏电阻传感器,主要技术参数如下:测量范围:-200℃~+850℃;允许偏差值△℃:A 级±(0.15+0.002│t│), B 级±(0.30+0.005│t│);最小置入深度:热电阻的最小置入深度≥200mm;允通电流≤ 5mA。
另外,Pt100 温度传感器还具有抗振动、稳定性好、准确度高、耐高压等优点。
铂热电阻的线性较好,在0~100 摄氏度之间变化时,最大非线性偏差小于0.5 摄氏度。
应用领域宽范围、高精度温度测量领域。
利用PT100铂热电阻与TL431自制可读值温度传感器高二(5)班彭健蒋晟何况白梓龙指导老师:王健平一、问题的提出电子化生活成为了一种趋势,更多的工具迈向电子化,.而生活中最常用的水银温度计在打破后其玻璃碎片和水银能对人们造成伤害的危险,所以,我们提出了这样一个设想:能不能制作出一种简单实用的电子控制的温度计,为我们的日常生活提供更好的保障.目前可读值温度传感器(温度计量系统)已经广泛应用在工业、农业生活各个领域,而且有多种成型产品。
但传统产品为了注重其精度和适应各种环境,如高温、超低温、高湿度、电磁场等环境,加载了很多特殊防护进行了特殊处理,使得产品造价昂贵、结构复杂,得不到普及。
给技术人员尤其是学生进行实验,研究带来了困难。
本文将结合实验严究和实际应用于一身,自制一套价格低廉、量程大、精度高、原理简单、操作方便、拓展X围大的可读值温度传感器。
TL431是TL.ST公司研制开发的并联型三端稳压基准。
其参数高(高精度,低温漂),性价比高,他的输出电压用两个电阻就可以任意的设置从2.5伏到36伏X围内的任何值。
近来在国内外得到了广泛应用。
本文介绍的测温电路,利用可调精密并联稳压器TL431和铂电阻构成工作电流可调的恒流源。
流过铂电阻的电流在极宽的阻值X 围内保持恒定值,有效的提高了温度测量精度。
二、研究的目1、为了使人们生活更加便捷安全。
2、减少水银之类的有害物质与人们接触的机会。
3、实现绿色环保,有利于大批量生产。
三、应用原理我们打算用热敏电阻作为探头,电流表作为表盘,利用电阻随温度变化而变化电流的方法得知温度数据.探头Pt100利用热敏电阻Pt100随温度增加电阻值减小的性质制作温度计探头具有灵敏度高、体积小、热响应快、缺点是非线性而且反应时间比较慢. 铂电阻测温精度高,性能稳定,互换性好,价格便宜,使用寿命长,测量X围大,应用十分广泛。
但一些测温电路没有采用恒流措施,使流过铂电阻的电流随其阻值变化而变化带来了较大的测量误差。
pn结测温原理快速而准确地测量温度对于现代工程应用非常重要。
在电子设备,尤其是半导体器件中,温度对于组件的性能和寿命至关重要。
因此,许多测温方法被开发出来。
其中一种测温方法是利用半导体材料中pn结的温度敏感特性。
pn结是半导体器件中最常用的结构之一。
它由n型和p型两种半导体材料相接而成。
当pn结处于静态状态时,存在电荷分离。
n区的自由电子流向p区,留下正空穴。
这种分离的电荷状态被称为空间电荷区。
当通过pn结的电流被施加时,电流从n区向p区流动。
在这种情况下,空间电荷区被压缩,电荷重新组合。
当电流反转时,pn结会阻止电流通过。
pn结具有温度敏感性。
留在p区的空穴和留在n区的自由电子的数量取决于温度。
因此,pn结的温度敏感性是由空穴和电子的数量变化引起的。
当温度升高时,受激进入p区的电子数量增加,这会导致在空穴阵列中增加更多的电子,并导致电荷分离减弱。
由此,空间电荷区的宽度和电荷重组区域的大小均会减少,减少会反过来影响pn结的电流流动。
因此,测量pn结的电流变化可以提供温度的准确度。
根据欧姆定律,当在两个端点之间施加恒定电势时,电流与电势成正比。
这是电子学中常见的法则。
因此,可以通过通过pn结施加特定的电压,来确定温度变化。
这个值被称为pn结的温度系数,它被定义为在给定电压下电流变化与温度变化之间的关系。
温度系数可以根据一些物理公式进行计算。
测量温度的方法与设备有关。
首先,两个端点间必须施加电压。
该电压必须足够高以产生足够的电流。
测试电路必须足够灵敏,以检测较小的电流变化。
测量pn结温度的方法可以由单个元件桥接电路实现,该桥接电路能够确定pn结的阴极和阳极之间的电阻变化。
该电阻随着温度的变化而变化,从而可以用来确定温度的变化。
此外,也可以使用温度变化的光谱响应来测量pn结的温度。
当pn结受到光照时会生成电荷,这可以被测量光电子学设备检测到。
当温度变化时,生成的光电流也会发生变化。
这个变化可以用来衡量温度变化。
热电偶电路设计方案全文共四篇示例,供读者参考第一篇示例:热电偶是一种常用的温度测量元件,其原理是利用不同金属之间的热电势差来实现温度测量。
热电偶电路设计方案是进行热电偶温度测量时必不可少的一部分,其设计的好坏直接影响到测量的准确性。
本文将详细介绍热电偶电路的设计方案,包括电路的基本原理、关键参数的选择,以及常见的设计方案及其优缺点。
一、热电偶电路的基本原理热电偶是利用两种不同金属之间的热电效应来实现温度测量的元件。
当热电偶的接线端温度发生变化时,两种金属之间会产生一个热电势差,通过测量这个热电势差来确定温度值。
热电偶的工作原理主要包括两点:温度差引起的热电势差和热电势差与温度值的关系。
二、热电偶电路设计的关键参数选择1、热电偶的材料选择:常见的热电偶材料有K型、J型、T型等,不同材料有不同的工作温度范围和精度要求,根据具体的应用场景选择合适的热电偶材料。
2、放大器的增益选择:热电偶产生的热电势差信号较小,需要通过放大器进行放大,选择合适的放大倍数来确保测量信号的准确性。
3、滤波器的设计:热电偶电路会受到环境噪声的干扰,需要设计滤波器来抑制噪声,提高信号质量。
4、参考电压的选择:热电偶电路通常需要一个稳定的参考电压作为基准,选择合适的参考电压来确保测量的准确性。
5、ADC分辨率的选择:ADC的分辨率决定了测量结果的精度,选择合适的ADC分辨率来满足实际需求。
三、常见的热电偶电路设计方案及其优缺点1、单端测量方案:将热电偶的一个端口接地,将另一个端口连接到测量电路。
优点是设计简单,缺点是信号容易受到干扰,准确性较低。
2、差动测量方案:将两个热电偶串联,通过测量两个热电偶之间的差值来实现温度测量。
优点是抗干扰能力强,准确性高,缺点是设计复杂。
3、冷端补偿方案:将热电偶的冷端接地,并通过一个补偿电路来抵消冷端温度对测量结果的影响。
优点是可以提高准确性,缺点是增加了设计的复杂性。
热电偶电路的设计方案是进行温度测量时的关键部分,设计方案的选择直接影响到测量结果的准确性和稳定性。
第32卷第9期2019年9月传感技术学报CHINESEJOURNALOFSENSORSANDACTUATORSVol 32㊀No 9Sept.2019项目来源:基于物联网技术的污染场地修复作业HES智能管控平台的开发与应用项目(18ZXRHSF00240)收稿日期:2019-04-29㊀㊀修改日期:2019-07-25HighPrecisionTemperatureControlSystemBasedonFuzzyPID∗ZHANGBaofeng1ꎬ2ꎬZHANGYao1ꎬ2ꎬZHUJunchao1ꎬ2∗ꎬDOUZiwen1ꎬ2ꎬFUYe1ꎬ2(1.EngineeringResearchCenterofOptoelectronicDevices&CommunicationTechnologyMinistryofEducationꎬTianjin300384ꎬChinaꎻ2.SchoolofElectricalandElectronicEngineeringꎬTianjinKeyLaboratoryforControlTheory&ApplicationsinComplicatedSystemꎬTianjinUniversityofTechnologyꎬTianjin300384ꎬChina)Abstract:Inordertomeetthedemandofon ̄sitecalibrationoftemperaturesensorinindustrialproductionfieldꎬaportablehighprecisiontemperaturecontrolsystembasedonFuzzyPIDisdesigned.ThissystemusesfuzzyalgorithmtoautomaticallycontrolandsetthePIDparametersꎬsothatitcanmeetthecontrolrequirementsofdifferenttemper ̄aturesegments.Thissetofhigh ̄precisiontemperaturecontrolsystemwasdesignedandbuiltaccordingtotheTECDrivemodulebasedonHBridgeDrivecircuitandtheplatinumresistancePT1000asthetemperaturesensor.Ex ̄perimentsshowthatwhenthetemperaturecontrolrangeisbetween-20ħand120ħꎬthesystemtemperaturecon ̄trolprecisionishigherthanʃ0.005ħꎬandcanbestabilizedinthesettemperatureforalongtimewithlittleover ̄shoot.Thesystemissmallinsizeandeasytocarryꎬwhichcanmeetthedemandofon ̄sitecalibrationoftemperaturesensorincomplexoccasions.Keywords:temperaturecontrolꎻfuzzyPIDꎻthermoelectriccoolerꎻclosed ̄loopcontrolEEACC:7230㊀㊀㊀㊀doi:10.3969/j.issn.1004-1699.2019.09.022基于模糊PID的高精度温度控制系统∗张宝峰1ꎬ2ꎬ张㊀燿1ꎬ2ꎬ朱均超1ꎬ2∗ꎬ豆梓文1ꎬ2ꎬ符㊀烨1ꎬ2(1.天津理工大学光电器件与通信技术教育部工程研究中心ꎬ天津300384ꎻ2.天津理工大学电气电子工程学院天津市复杂系统控制理论及应用重点实验室ꎬ天津300384)摘㊀要:为满足工业生产领域对温度传感器现场标定的需求ꎬ设计了一套基于模糊PID的便携式高精度温度控制系统ꎮ使用模糊算法对PID参数进行自动控制和整定ꎬ满足对不同温度段的控制要求ꎬ根据H桥驱动电路搭建TEC驱动模块ꎬ利用铂电阻PT1000作为温度传感器ꎬ设计并完成了一套高精度温度控制系统ꎮ实验表明ꎬ在-20ħ~120ħ的控温范围之间ꎬ系统控温精度优于ʃ0.005ħꎬ并可以长期稳定在设定温度ꎬ超调量小ꎮ系统体积小ꎬ携带方便ꎬ可以满足复杂场合现场标定温度传感器的需求ꎮ关键词:温度控制ꎻ模糊PIDꎻ半导体制冷器ꎻ闭环控制中图分类号:TP393㊀㊀㊀㊀文献标识码:A㊀㊀㊀㊀文章编号:1004-1699(2019)09-1425-05㊀㊀温度的测量是工业生产中一个重要指标ꎬ其精度严重影响产品质量㊁生产工艺和生产安全ꎬ需要定期对温度传感器进行计量和校准ꎬ以保证温度测量的精度[1]ꎮ但在某些特定场合ꎬ如工业生产线或者石油钻井平台ꎬ温度传感器难以拆卸下来进行校准ꎬ需要现场进行标定ꎮ因此ꎬ设计一款用于现场校准温度传感器的便携式温度控制系统具有非常重要的现实意义[2]ꎮ目前便携式的高精度温度控制系统大多使用半导体制冷器(ThermoElectricCoolerꎬTEC)来作为控制对象ꎬ来间接稳定被控物体的温度[3]ꎮ其中ꎬ美国Fluke(福禄克)公司研制的高精度干式计量炉的控温性能处于世界领先地位[4]ꎮ国内也有一些厂家在研究生产便携式的温度控制系统ꎬ但控温精度一般在0.01ħ左右ꎬ整定速度不够快ꎬ控温效果还不够理想[5]ꎮ本文利用模糊PID算法展开高精度大范围温度方法研究ꎬ在获得高精度稳定度的同时ꎬ提高整定传㊀感㊀技㊀术㊀学㊀报chinatransducers.seu.edu.cn第32卷速度ꎻ采用高精度铂电阻温度传感器和大功率TEC驱动电路相结合ꎬ设计并制作了一套基于模糊PID的高精度温度控制系统ꎮ1㊀温度控制原理1.1㊀TEC的工作原理半导体制冷器是一种根据帕尔贴效应工作的电流型工作器件[6]ꎮ其内部是由P型半导体和N型半导体组成的热电偶对[7]ꎮ当有电流流过回路时ꎬ半导体内部会相应的吸收和放出热量来改变自身的势能ꎬ从而在半导体制冷器的两端形成冷端和热端ꎬ当电流方向改变时ꎬ其冷热两端也会发生互换[8]ꎮ图1为TEC的结构示意图ꎮA为冷端ꎬB为热端ꎬU为加载在TEC两端的电压ꎬI为电路中电流ꎮ同其他功率器件相比ꎬTEC具有体积小㊁升降温快㊁操作方便和控制效果明显等优点ꎮ故本系统采用TEC作为功率元件ꎮ图1㊀TEC结构示意图1.2㊀模糊PID温控系统通常是时变㊁非线性㊁具有纯滞后的复杂大惯性系统ꎬ多采用PID控制算法对其进行控制[9]ꎬ但传统PID方法无法满足高精度温度控制系统的控制要求ꎬ为了让PID参数能够自动适应不同温度段的控制要求ꎬ获得更精准的控温效果[10]ꎬ本文利用模糊控制的方式对传统的PID算法进行改进ꎬ设计出了一套PID参数自整定算法ꎮ图2是本系统的模糊PID控制结构图ꎮ图2㊀模糊PID控制结构图本系统的模糊控制器是将被控物体的温度偏差e及其偏差变化率ec作为模糊控制器的输入ꎬ然后通过模糊规则库对模糊输入量经过模糊推理ꎬ最后得到PID控制器的三个修正量Kp㊁Ki㊁Kd[11]ꎮ在对温度控制系统进行综合分析后ꎬ得出温度偏差e的论域为[-6ꎬ6]ꎬ温度偏差变化率ec的论域为[-1ꎬ1]ꎬ针对温度偏差及其变化率和控制量变化之间的变化关系ꎬ均采用为 负大(NB) ㊁ 负中(NM) ㊁ 负小(NS) ㊁ 零(ZO) ㊁ 正小(PS) ㊁ 正中(PM) 和 正大(PB) 7个模糊子集ꎬ各变量的隶属度函数为三角函数ꎮ如图3所示ꎮ图3㊀隶属度函数根据温度偏差和偏差变化率综合确定的模糊规则:先由PID控制原理制定相应的模糊规则ꎬ并计算每条控制规则的模糊关系ꎬ再通过推理和解模糊化处理ꎬ得到ΔKp的模糊控制表ꎬ如表1所示ꎬ同理得到ΔKiꎬΔKd的模糊控制表ꎮ最后将三张模糊控制表存入单片机中ꎬ通过PID参数的整定算式计算后最终得到PID控制量ꎬ从而实现实时自动的温度控制[12]ꎮ表1㊀ΔKp模糊控制表eecNBNMNSZOPSPMPBNBPBPBPMPMPSZOZONMPBPBPMPSPSZONSNSPMPMPMPSZONSNSZOPMPMPSZONSNMNMPSPSPSZONSNSNMNBPMPSZONSNMNMNMNBPBZOZONMNMNBNBNB1.3㊀温度控制模型由上文分析可知ꎬTEC具有变工况特性ꎬ在不同温差下ꎬ加相同的电压ꎬ输出电流是不同的ꎬ这将严重影响温控系统的精度和控制范围[13]ꎮ为了消除这部分影响ꎬ把被控温度和TEC的自身电气特性变化都纳入了控制环节ꎬ建立了温度-电流双闭环控制模型ꎮ温度-电流双闭环控制模型如图4所示ꎮ在上述双闭环控制环节中ꎬ内环是电流反馈环节ꎬ因其反应速度快ꎬ系统惯性小ꎬ故采用PI控制ꎮ外环是温度反馈环节ꎬ需要对温度进行实时的调节ꎬ6241第9期张宝峰ꎬ张㊀燿等:基于模糊PID的高精度温度控制系统㊀㊀故采用PID控制[14]ꎮ图4㊀温度-电流双闭环控制模型2㊀系统总体设计2.1㊀系统总体结构采用STM32F103单片机作为处理器ꎬ利用4只大功率MOS管搭建H桥驱动电路ꎻ使用霍尔传感器测量TEC实际电流信号ꎮ选用A级铂电阻PT1000作为温度传感器ꎬ将采集到的电压信号送入24位的A/D中进行数模转换ꎮ通过人机交互界面(HMI)输入目标温度值ꎮ系统结构图如图5所示ꎮ图5㊀系统结构图图6㊀测温电路2.2㊀硬件部分设计2.2.1㊀温度采集模块本系统选用温度系数大㊁灵敏度高㊁适用于动态测量的铂电阻Pt1000作为温度传感器ꎮ将铂电阻接入ꎬ和3个千分之一的1kΩ电阻组成桥式测量电路ꎬ来提高系统的测温精度ꎬ再通过PT1000两端电压的变化ꎬ测量其电阻变化ꎬ经过ADS1110转换为数字信号ꎬ计算出温度值ꎮ图6为测温电路ꎮ2.2.2㊀TEC驱动模块根据TEC的工作原理可知ꎬTEC驱动电路需要能够提供具有一定驱动能力并且方向大小可调的电流信号ꎮH桥驱动电路是一种经典的驱动电路ꎬ所以本系统选择H桥驱动电路作为TEC的驱动电路ꎮ选用全桥驱动芯片HIP4082和4只大功率MOS管来搭建TEC驱动电路ꎬTEC驱动电路结构图如图7所示ꎮ图7㊀TEC驱动电路原理图2.3㊀软件部分设计2.3.1㊀模糊控制器设计本系统是将采集到的被控物体的温度偏差e及其偏差变化率ec作为模糊控制器的输入ꎬ映射到模糊子集里ꎻ然后通过查询模糊控制规则库推理得到相应的模糊规则ꎬ再对其去模糊化得到ΔKpꎬΔKiꎬΔKdꎻ乘以一个比例因子得到最终的修正参数Kp㊁Ki㊁Kdꎻ再通过单片机产生相应的PWM波ꎬ最终驱动TEC工作ꎮ图8为模糊PID工作流程图ꎮ图8㊀模糊PID工作流程2.3.2㊀上位机软件设计基于嵌入式WinCE触摸屏结合多线程的技术设计了人机交互软件ꎮ系统主要包括两个工作线程ꎬ一个为主工作线程ꎬ负责人机交互ꎻ另一个为通讯线程ꎬ负责通过串口同下位机进行信息交互ꎬ把工作参数发送到下位机ꎬ同时读取下位机的当前温度和工作状态ꎬ显示在触摸屏上ꎮ主工作线程将实时采集到的温度信号显示在触摸屏上ꎬ同时将设定的参数信息发送到下位机进行相应的控制ꎬ从而实现人机交互ꎮ主线程的工作流程图如图9所示ꎮ系统上电工作ꎬ进行初始化ꎬ并把控制权交给上位机ꎮ系统主线程启动ꎬ首先读取系统配置参数并对人7241传㊀感㊀技㊀术㊀学㊀报chinatransducers.seu.edu.cn第32卷图9㊀主线程工作流程图机交互界面进行初始化ꎬ随后创建串口接收线程ꎬ串口接收线程创建完成后ꎬ打开串口接收温度传感器传来的温度信号ꎮ串口接收线程与主线程之间采用互斥体的方式进行线程同步ꎮ多线程之间配合工作ꎬ使系统资源得到更为高效的利用ꎬ提高了系统工作效率ꎮ3㊀温控实验及结果分析结合温度采集模块㊁TEC驱动电路㊁人机交互触摸屏ꎬ加之机械装配和规范化布线最终设计并完成的高精度的温度控制系统ꎬ实物图如图10所示ꎮ图10㊀系统实物图3.1㊀控温稳定度实验为了验证本温度控制系统的控温稳定度ꎬ在-20ħ~120ħ的温度之间对系统的控温性能进行了实验ꎮ实验之前ꎬ利用福禄克高精度恒温水槽7008与标准温度计5699对实验中所用的温度传感器进行标定ꎬ恒温水槽7008与标准温度计5699的精度均为0.001ħꎬ因此标定后温控系统精度可达ʃ0.003ħꎮ实验在室内温度(25.1ħ)环境下进行ꎬ将恒温插块作为被控对象ꎬ恒温插块选用的是具有较好热传导能力和自身温度稳定性的铝块ꎮ先将系统温度从室温调到-20ħꎬ然后以每20ħ为一个控温点ꎬ进行升温实验ꎬ直到系统达到最高可控温度值120ħꎮ表2为各控温节点的长时间温度控制实验数据表ꎬ每个设定温度的控温时长均为稳定后的2hꎮT1为设定温度ꎬT2为在系统稳定后2h内实际测得恒温插块的温度变化范围值ꎬδ为每个设定温度下的温度浮动范围ꎮ由表2可见:在2h的控温时间内ꎬ各个控温节点温度波动范围最大为0.0040ħꎬ最小为0.0021ħꎬ温度波动在预期范围内ꎬ系统控温稳定ꎮ表2㊀控温稳定度实验数据表设定温度T1/ħ实测温度T2/ħ温度浮动范围δ/ħ-20-19.9983~-20.00190.00360-0.9985~0.00170.00322019.9990~20.00110.00214039.9989~40.00110.00226059.9987~60.00170.00308079.9980~80.00080.002810099.9980~100.00150.0035120119.9979~120.00190.00403.2㊀模糊PID实验为了验证模糊PID的控制效果ꎬ进行了针对实验ꎬ具体实验方法如下:在室温环境(25ħ)下ꎬ分别在有无模糊PID的情况下ꎬ恒温插块作为被控对象ꎬ将系统调至-20ħ和120ħ进行实验ꎮ首先将系统使用传统PID调至120ħꎬ待系统稳定ꎬ得到控温曲线ꎬ随后在模糊PID的情况下重复上述操作ꎬ得到控温曲线如图11所示ꎮ图11㊀120ħ控温曲线待系统重新稳定在室温以后ꎬ按上述操作将系统分别调至-20ħꎬ得到控温曲线如图12所示ꎬ其中横轴是时间(单位0.1s)ꎬ纵轴是温度(单位ħ)ꎬ图中所示曲线即为实际采集恒温插块的温度变化曲线ꎮ从图12的控温曲线可知ꎬ在传统PID调节情况8241第9期张宝峰ꎬ张㊀燿等:基于模糊PID的高精度温度控制系统㊀㊀图12㊀-20ħ控温曲线下ꎬ设定系统温度为120ħ后ꎬ经220s左右的温度调节系统收敛稳定至120ħꎬ但在模糊PID控制下ꎬ系统经180s左右的调节后系统稳定在120ħꎮ同理ꎬ设定系统温度为-20ħꎬ传统PID经300s左右的温度调节系统收敛稳定至-20ħꎬ而模糊PID控制下ꎬ系统经250s左右就逐渐稳定ꎮ实验表明ꎬ系统在模糊PID控制环节的情况下ꎬ控温收敛速度更快ꎬ系统能在较短时间内稳定在设定温度ꎬ控温性能良好ꎮ4㊀结论针对工业生产领域对温度传感器现场标定的需求ꎬ本文研究了在较大的温度控制范围内ꎬPID参数能够自动适应不同温度段的控制要求ꎬ引入了模糊PID算法ꎮ结合温度检测电路㊁大功率TEC驱动电路和人机交互触摸屏设计并完成了便携式高精度温度控制系统的研制ꎮ实验表明ꎬ本系统在-20ħ~120ħ的温度范围内控温精度优于ʃ0.005ħꎬ动态响应速度快ꎬ控温时间长ꎬ携带方便ꎬ可以满足大多数现场温度标定场合对于温度控制的要求ꎮ参考文献:[1]㊀陈俊祥ꎬ于继东ꎬ耿华运ꎬ等.多孔材料的温度和压强计算[J].物理学报ꎬ2017ꎬ66(5):257-264.[2]李旭ꎬ李强国ꎬ蒋建宏ꎬ等.一种精密恒温环境微量燃烧-溶解-反应多用量热计的设计及应用[J].物理化学学报ꎬ2018ꎬ38(5):43-47.[3]李江澜ꎬ石云波ꎬ赵鹏飞.TEC的高精度半导体激光器温控设计[J].红外与激光工程ꎬ2014ꎬ43(6):1745-1749.[4]朱均超ꎬ豆梓文ꎬ李嘉强ꎬ等.高精度大范围的光学晶体温度控制系统[J].光学精密工程ꎬ2018ꎬ26(7):1604-1611.[5]周锋ꎬ王如刚ꎬ纪正飚ꎬ等.基于高精度TEC温度控制器的可调光子微波信号产生的研究[J].光电子 激光ꎬ2014ꎬ25(9):1691-1694.[6]章喜ꎬ王继平ꎬ孙华燕.半导体制冷器作为标定物的红外成像仪隐式标定[J].红外与激光工程ꎬ2010ꎬ39(5):972-978.[7]何启欣ꎬ刘慧芳ꎬ李彬ꎬ等.多通道半导体激光器温控系统[J].光学学报ꎬ2017ꎬ37(11):1114002.[8]王选择ꎬ曾志祥ꎬ钟毓宁ꎬ等.基于相差识别的半导体激光器温度精密测量与控制[J].光电子 激光ꎬ2013ꎬ24(2):239-245.[9]郭成林ꎬ蒋日鹏ꎬ李晓谦ꎬ等.基于Fuzzy ̄PID的大规格铸锭结晶器液位控制[J].机械工程学报ꎬ2018ꎬ54(22):212-217.[10]戴俊珂ꎬ姜海明ꎬ钟奇润ꎬ等.基于自整定模糊PID算法的LD温度控制系统[J].红外与激光工程ꎬ2014ꎬ43(10):3287-3291.[11]GangYangꎬJingMinꎬDuXiaoYunꎬetal.AsymmetricFuzzyControlofaPositiveandNegativePneumaticPressureServoSystem[J].中国机械工程学报ꎬ2017ꎬ30(6):1438-1446.[12]屈毅ꎬ宁铎ꎬ赖展翅ꎬ等.温室温度控制系统的神经网络PID控制[J].农业工程学报ꎬ2011ꎬ27(2):307-311.[13]张龙ꎬ陈建生ꎬ高静ꎬ等.大功率半导体激光器驱动电源及温控系统设计[J].红外与激光工程ꎬ2018ꎬ47(10):95-101.[14]ZhaoTꎬFanZꎬXiaoHꎬetal.Temperature ̄StablePumpingReali ̄zationThroughtheOptimizationthePump ̄LaserSpectralDistribu ̄tioninOpticalAmplifiers[J].OpticsCommunicationsꎬ2017ꎬ402(6):551-556.张宝峰(1962-)ꎬ男ꎬ教授ꎬ现为天津理工大学博士生导师ꎬ主要从事光电检测与机器视觉方面的研究ꎬzhangbaofeng@263.netꎻ张㊀燿(1994-)ꎬ男ꎬ天津理工大学电气电子工程学院硕士研究生在读ꎬ主要从事光电检测与控制方面的研究ꎬ18522267341@163.comꎻ㊀朱均超(1972-)ꎬ男ꎬ通讯作者ꎬ副教授ꎬ现为天津理工大学研究生导师ꎬ主要从事光电检测与控制方面的研究ꎬzhujunchao_tjut@163.comꎮ9241。
第1篇一、引言随着科技的不断发展,温度传感器在各个领域得到了广泛应用。
从工业生产到日常生活,从航空航天到医疗健康,温度传感器都扮演着至关重要的角色。
本文将详细介绍温度传感器的技术原理、应用领域、解决方案以及未来发展趋势。
二、温度传感器的技术原理1. 测温原理温度传感器的工作原理主要是基于温度与物理量之间的对应关系。
常见的测温原理有热电偶、热电阻、红外测温、半导体测温等。
(1)热电偶:利用两种不同材料的导线接触时产生的热电势与温度之间的关系进行测温。
(2)热电阻:利用电阻值随温度变化而变化的特性进行测温。
(3)红外测温:通过检测物体表面发射的红外辐射能量,将其转化为温度值。
(4)半导体测温:利用半导体材料的电阻、电容、电导等物理量随温度变化的特性进行测温。
2. 传感器结构温度传感器的结构主要包括敏感元件、信号处理电路和输出接口。
敏感元件是传感器的核心,负责将温度变化转换为电信号;信号处理电路对敏感元件输出的信号进行放大、滤波、线性化等处理;输出接口将处理后的信号转换为便于传输和处理的电信号。
三、温度传感器的应用领域1. 工业领域(1)自动化控制:在工业生产过程中,温度传感器可用于控制加热、冷却、干燥等过程,提高生产效率和产品质量。
(2)能源管理:温度传感器在能源管理领域具有重要作用,如监测电力、石油、天然气等能源的使用情况,实现节能减排。
(3)质量检测:在工业生产过程中,温度传感器可用于检测产品温度,确保产品质量。
2. 生活领域(1)家用电器:温度传感器在洗衣机、空调、冰箱等家用电器中用于控制工作温度,提高使用效果。
(2)汽车:温度传感器在汽车发动机、变速器、空调等部件中用于监测温度,保障车辆安全运行。
(3)医疗设备:温度传感器在医疗设备中用于监测人体体温、血液温度等,为医生提供准确的治疗依据。
3. 其他领域(1)航空航天:温度传感器在航空航天领域用于监测飞行器表面温度、发动机温度等,确保飞行安全。
1 高精度测温电路 设计报告
姓名: 班级:
目录 一、 摘要……………………………………………………3 2
二、 测量电路分析…………………………………………3 三、 放大电路分析…………………………………………5 四、 电路的调试……………………………………………8 五、 经费统计………………………………………………9 六、 参考文献………………………………………………9 附:实验数据记录与分析
一、摘要 本文介绍一种简单实用的四线制PT100测温电路。运用OP07实现三运放的仪用放大,100倍可调放大,用于测量0℃至80℃的温度。以恒流源为PT100提供电流,通过它的电压变化,反映温度的变化。本文提供电路原理图,并给出了该电路的参数计算公式和电路误差3
的调整方法。 关键字:PT100 恒流源 四线制 仪用放大 Abstract Thispaper introduces a simple and practical four-wirecircuitPT100 temperature measurement circuit. Use the instrument amplifier with three OP07 chips, 100 times adjustable amplifier.This circuit is used to measure 0 ℃ to 80 ℃ temperature. The constant flow source offers current for PT100.When its voltage changed ,it can reflect the change of temperature. This paper provides the circuit principle diagram, and gives the method to adjusting the error of circuit and provides circuit parameters calculation formula. Keywords: PT100 constant flow source four-wirecircuit the instrument amplifier
二、测试电路分析 (1) 传感器的选择: 热敏电阻与热电偶的选择: 热敏电阻是中低温区最常用的一种温度检测器。它的主要特点是测量精度高,性能稳定,一般测温度在-200~800℃。测量精确度最高的铂热电阻不仅应用于工业测温,而且被制成标准的基准仪。热电阻是利用金属导体或半导体有温度变化时本身电阻也随着发生变化的特性来测量温度的,热电阻的受热部分(感温元件)是用细金属丝均匀地绕在绝缘材料作成的骨架上或通过激光溅射工艺在基片形成。当被测介质有温度梯度时,则所测得的温度是感温元件所在范围内介质层的平均温度。热电阻测温系统一般由热电阻、连接导线和显示仪表等组成。 热电偶的特点是测量精度高,因热电偶直接与被测对象接触,不受中间介质的影响。测量范围广,常用的热电偶从-50~1600℃均可连续测量。构造简单,使用方便。热电偶通常是由两种不同的金属丝组成,而且不受大小和开头的限制,外有保护套管,用起来非常方便。热电偶是一种感温元件,它能将温度信号转换成热电势信号,通过电气测量仪表的配合,就能测量出被测的温度。热电偶测温的基本原理是热电效应。在由两种不同材料的导体A和B所组成的闭合回路中,当A和B的两个接点处于不同温度T和To时,在回路中就会产生热电势。这就是所谓的塞贝克效应。导体A和B称为热电极。温度较高的一端叫工作端(通常焊接在一起);温度较低的一端叫自由端(通常处于某个恒定的温度下〉。在热电偶回路中接入第三种金属材料时,只要该材料两个接点的温度相同,热电偶所产生的热电势将保持不变,即不受第三种金属接入回路中的影响。因此,在热电偶测温时,可接入测量仪表,测得热电势后,即可知道被测介质的温度。 根据本次实验的要求,测量精度在0.1℃,由于热电偶的测量精度很难超过0.2℃,而热电阻的测量精度要比热电偶高一个数量级,且稳定性好。在振动小而适宜的环境下,可在很长时间内保持在0.1℃以下的稳定性。且本次的实验,测量的是物体空间的平均温度,故将采用Pt100A热敏电阻。Pt100主要用来测量-200℃至+600℃的温度,热敏度4
为0.38Ω/℃。国际标准规定的Pt100测量精度允许偏差为:在0℃时A级的阻值为100±0.06Ω,B级为100±0.12Ω。市面价格大约在20至30元,能够接受。 (2) 引线方式: Pt100在测量时需要引出导线,从热电阻的测温原理可知,被测温度的变化是直接通过热电阻阻值的变化来测量的,因此,热电阻体的引出线等各种线电阻的变化会给温度测量带来影响,引起连接导线电阻的变化主要有:导线长度的变化,导线接头处接触电阻的变化,重接线引起的电阻变化,还有环境温度的变化以及测量线路中寄生电势等。 目前热敏电阻主要有以下三种引线方式: 二线制:在热电阻的两端各连接一根导线来引出电阻信号的方式叫二线制。这种引线方法很简单,但由于连接导线必然存在引线电阻r,r的大小与导线的材质和长度的因素有关,因此这种引线方式只适用于测量精度较低的场合 三线制:在热电阻的根部的一端连接一根引线,另一端连接两根引线的方式称为三线制,这种方式通常与电桥配套使用,可以较好的消除引线电阻的影响,是工业过程控制中的最常用的。 四线制:在热电阻的根部两端各连接两根导线的方式称为四线制,其中两根引线为热电阻提供恒定电流I,把R转换成电压信号U,再通过另两根引线把U引至二次仪表。可见这种引线方式可完全消除引线的电阻影响,主要用于高精度的温度检测。 本次实验采用三线制桥式电路接法。采用三线制是为了消除连接导线电阻引起的测量误差。这是因为测量热电阻的电路一般是不平衡电桥。热电阻作为电桥的一个桥臂电阻,其连接导线也成为桥臂电阻的一部分,这一部分电阻是未知的且随环境温度变化,造成测量误差。采用三线制,将导线一根接到电桥的电源端,其余两根分别接到热电阻所在的桥臂及与其相邻的桥臂上,这样消除了导线线路电阻带来的测量误差。图(1)为稳压电路可以为图(2)提供4.096的参考电压,取代5V电源,TL431为稳压管。图(2)中以R13代替热敏电阻,当温度为零时输出电压理论值为0V,随着温度的变化,热敏电阻的电阻发生改变,就引起了压差的变化,由此计算出当前测量的温度。
图(1)图(2) 三、放大电路分析 本次试验中热敏电阻要测量的温度范围是0℃至80℃,而Pt100的热敏度为0.38Ω/℃,所以热敏电阻阻值的最大变化范围是100Ω至130.4Ω,通过恒流源对其提供4.0944.7VImAK
的电流,所以热敏电阻上的压降范围约为87.1mV至113.6mV,由此考虑放大5
电路放大100倍。从电路的性能看,单级放大器的倍数做得太大,稳定性和信噪比就要下降,对信号放大不利。因此往往要采用各种负反馈来改善放大器性能。多级放大器有利于加入各种负反馈,而且可以合理地安排前后各级工作重点,这样有利于获得良好的放大效果,故采用两级放大。一般前级要抑制噪声影响,放大倍数应较小,后续放大再调整到要求的放大倍数。具体放大电路如图(3)所示:其中U1、U2、U3为OP07运算放大器,Rw和R5为10K精密可调电阻。
图(3) 首先选定R1,R2为10K的电阻,设定前级放大为5倍,后级放大20倍。 由关系式:
12020112()wii
w
RRRUUUUR
可得:2105wwKRR,解得Rw约为5K,所以选择10K可调电阻,同时也可通过调整Rw调整放大电路的放大倍数。后级的20倍放大,选择R4、R6为100K。 由关系式:
400201
3
()RUUUR
可得:R3≈4.7K,实际放大约为21.3倍。因为电阻的100K和4.7K都不是精确值,而后级差动放大的电阻精度要求很严格,必须符合
64
35
RR
RR
所以选择R5为10K精密可调电阻。综上所述该三运放的总的放大倍数为:4123(1)uw
RRRARR。
输入阻抗与共模抑制比:在第二级放大中,输入阻抗不够高,会使输入电压降低,不能有效放大,于是在同相端和反相端加上电压跟随器。在第一级中将这两个电压跟随器改成同相放大器,它对差分增加相同的增益,也对共模信号增加相同的增益,因此,它对原电路的共模抑制比并没有增加。现在引入电阻Rw,取代了原同相放大器接地端上方的两个电阻,整6
个差分输入电压现在都呈现在Rw两端。因为输入电压经过放大后(在A1 和A2的输出端)的差分电压呈现在R1,Rw和R2这三只电阻上,所以差分增益可以通过仅改变Rw进行调整。对于该系统的第二级的放大,其共模电压增益Acm为:
0544
3356(1)cmcm
VRRR
AVRRRR
因为本电路中满足6435RRRR,所以共模电压增益Acm应为零。 其差模增益Ad为: 0544
33561[(1)]2dt
VRRR
AVRRRR
当6435RRRR时,差模增益43dRAR。但在实际电路中并不能完全做到6435RRRR,它们的电阻会存在误差,最差的情况下只能满足 64
35
(1)(1)(1)(1)RkRkRkRk
对于差模增益,虽然电阻存在误差为k,但因为k<<1,故差模增益仍为423dRAR。 可是共模增益为: 4440
343311111111cmcm
RkRkRkVAVRkRkRkRk
整理可得: 434
4cmkRARR
所以
22120lg||4dCMR
AKk
对于该系统的第一级放大,其差模增益为 1112d
w
RAR
综上可知,整个系统的共模抑制比 2112211220lg4dCMRdCMR
ARKAKRk
由此可以看出,系统的共模抑制比受到电阻的误差影响比较大,所以要选择误差尽量小的电阻,对于相同阻值的电阻要选择同一批次,使其偏差尽量相同或者接近。