高精度半导体激光器自稳温控系统_图文(精)
- 格式:doc
- 大小:475.00 KB
- 文档页数:16
传感器光电传感器概要光电传感器的定义「光电传感器」是利用光的各种性质,检测物体的有无和表面状态的变化等的传感器。
光电传感器主要由发光的投光部和接受光线的受光部构成。
如果投射的光线因检测物体不同而被遮掩或反射,到达受光部的量将会发生变化。
受光部将检测出这种变化,并转换为电气信号,进行输出。
大多使用可视光(主要为红色,也用绿色、蓝色来判断颜色)和红外光。
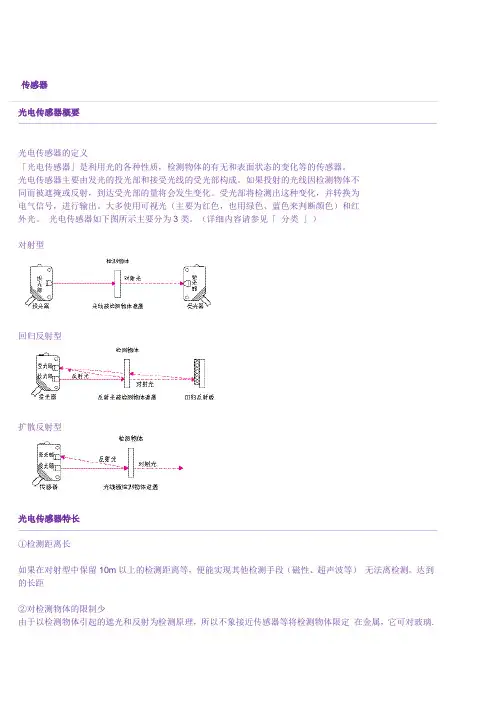
光电传感器如下图所示主要分为3类。
(详细内容请参见「分类」)对射型回归反射型扩散反射型光电传感器特长①检测距离长如果在对射型中保留10m以上的检测距离等,便能实现其他检测手段(磁性、超声波等)无法离检测。
达到的长距②对检测物体的限制少由于以检测物体引起的遮光和反射为检测原理,所以不象接近传感器等将检测物体限定在金属,它可对玻璃.塑料.木材.液体等几乎所有物体进行检测。
③响应时间短光本身为高速,并且传感器的电路都由电子零件构成,所以不包含机械性工作时间,响应时间非常短。
④分辨率高能通过高级设计技术使投光光束集中在小光点,或通过构成特殊的受光光学系统,来实现高分辨率。
也可进行微小物体的检测和高精度的位置检测。
⑤可实现非接触的检测可以无须机械性地接触检测物体实现检测,因此不会对检测物体和传感器造成损伤。
因此,传感器能长期使用。
⑥可实现颜色判别通过检测物体形成的光的反射率和吸收率根据被投光的光线波长和检测物体的颜色组合而有所差异。
利用这种性质,可对检测物体的颜色进行检测。
⑦便于调整在投射可视光的类型中,投光光束是眼睛可见的,便于对检测物体的位置进行调整。
光电传感器原理①光的性质直射光在空气中和水中时,总是直线传播。
使用对射型传感器外置的开叉来检测微小物体的示例便是运用了这种原理。
曲折是指光射入到曲折率不同的界面上时,通过该界面后,改变行进方向的现象。
反射(正反射、回归反射、扩散反射)在镜面和玻璃平面上,光会以与入射角相同的角度反射,称为正反射。
3个平面互相直角般组合的形状称为三面直角棱镜。
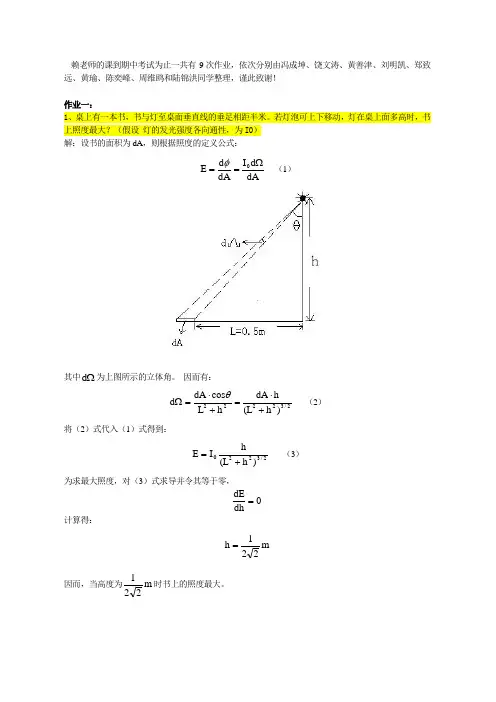
赖老师的课到期中考试为止一共有9次作业,依次分别由冯成坤、饶文涛、黄善津、刘明凯、郑致远、黄瑜、陈奕峰、周维鸥和陆锦洪同学整理,谨此致谢!作业一:1、桌上有一本书,书与灯至桌面垂直线的垂足相距半米。
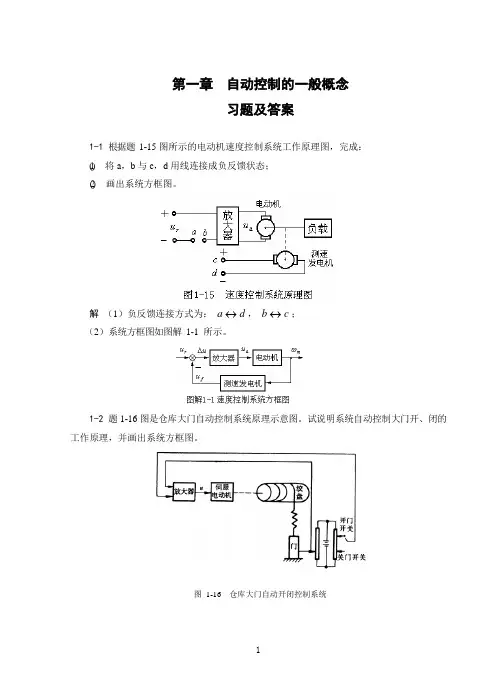
若灯泡可上下移动,灯在桌上面多高时,书上照度最大?(假设 灯的发光强度各向通性,为I0) 解:设书的面积为dA ,则根据照度的定义公式:dAd I dA d E 0Ω==φ (1)其中Ωd 为上图所示的立体角。
因而有:2/32222)h (L hdA h L cos dA d +⋅=+⋅=Ωθ (2) 将(2)式代入(1)式得到:2/3220)h (L hI E += (3) 为求最大照度,对(3)式求导并令其等于零,0dhdE= 计算得:m 221h =因而,当高度为m 221时书上的照度最大。
2、设He-Ne 激光器中放电管直径为1mm ,发出波长为6328埃的激光束,全发散角为θ=10-3rad ,辐射通量为3mW ,视见函数取 V(6328)=0.24,求: (1)光通量,发光强度,沿轴线方向的亮度?(2)离激光器10米远处观察屏上照明区中心的照度?(3)若人眼只宜看一熙提的亮度,保护眼镜的透射系数应为多少? 解:(1)光通量:lm 49.010324.0638V K 3m v =⨯⨯⨯=Φ⋅⋅=Φ-θ 发光强度:cd 1024.64d d I 52vv ⨯≈Φ=ΩΦ=θπ 亮度:211235m /cd 1059.7)10(41024.6dAcos dI L ⨯≈⨯⨯==-πθ轴(2)由题意知,10米远处的照明区域直径为: m 101010L D 23--=⨯=⋅=θ从而照度为:lx 9.6238)10(4149.0D 4E 222v=⨯⨯=Φ=-ππ(3)透射率:81141026.11095.710L 1T -⨯≈⨯==轴(熙提)作业二1、说明蓝色火焰与黄色火焰的色温谁高,为什么? 答:色温是用黑体的温度来标度普通热辐射源的温度。
光刻机投影物镜的温度控制算法聂宏飞1 李小平1 张玲莉21.华中科技大学数字制造装备与技术国家重点实验室,武汉,4300742.天津城市建设学院,天津,300381摘要:针对光刻机媒质远传温控系统的大惯性、多重时滞和多重扰动特征,提出了双输入双输出多模态非线性PI 控制算法来提高温控过程的收敛速度和稳态精度。
算法将温控系统从启动到稳定划分为5个控制模态,下层采用非线性PI 算法实现精确控制,上层利用智能决策实现多模态的选择和切换。
该算法已被成功运用于光刻机投影物镜温度控制系统中,实现了投影物镜温度控制的快速收敛,使光刻机在±0.006℃范围内稳定工作,对比实验进一步显示该算法具有较强的鲁棒性和自适应性。
关键词:温度控制;PI 算法;多模态;智能决策;双输入双输出中图分类号:TP273 文章编号:1004—132X (2008)10—1135—05Temperature Control Algorithm for Optical Lithography Projection LensNie H ongfei 1 Li Xiaoping 1 Zhang Ling li21.State Key Laboratory of Digital Manufacturing Equipment &Technology ,Huazhong Unive rsity o f Science and Technolo gy ,Wuhan ,4300742.Tianjin Institute of Urban Co nstructio n ,Tianjin ,300381A bstract :A tw o -input tw o -output no nlinear PI algo rithm w as presented to improve the convergent speed and steady -state accuracy of the temperature co ntro l sy stem fo r projectio n lens ,w hich had the characteristics of big inertia ,multi -time -delay and multi -pe rturbation .Contro l pro cess w as divided into five phase s from star t to stability according to the ideal dy namic response curve .Improved PI alg orithm w as applied to precise by adjust and intelligent decision realizes choice and switch of the multi -model .This algorithm is used in the temperature control system of projection lens of optical lithog raphy and has achieved quick convergent speed and ±0.006℃temperature stability .The contrast experimental results show that the algorithm has strong robust and self -adaptive .Key words :temperature control ;PI alg orithm ;m ulti -m ode ;intelligent decisio n ;tw o -input tw o -output收稿日期:2006—11—29基金项目:国家重点基础研究发展计划资助项目(2003C B716206);国家863高技术研究发展计划资助重大项目(2002A A4Z3000)0 引言光学投影光刻机需不断提高分辨率以满足集成电路芯片特征线宽逐渐缩小的需求,这种需求和更高的成像质量控制使光刻机内部以及关键部件的温度、压力、湿度等微环境参数的波动成为影响成像质量的重要因素[1]。
十一章THDS红外线轴温探测系统-图文第十一章红外线轴温探测系统第一节红外热轴探测系统红外线轴温探测系统经历了第一代、第二代及第三代,目前使用得较多的是第三代HBDS-Ⅲ型红外热轴探测系统。
HBDS-Ⅲ型红外热轴探测系统(以下简称三型机)是为适应列车不断提速而开发的新型热轴探测系统,采用调制型致冷式光子探头和新型的自适应轴温计算技术,满足最高车速达360公里/小时运行列车轴温探测和热轴报警的需要。
三型机的光子探头采用碲镉汞光导型(HgCdTe-Pc)器件,器件响应时间常数小于1微秒;探测器件采用半导体二级致冷,使探头的响应率及信噪比比常温工作状态下的探测器有很大提高。
探头光路用调制盘调制,电路采用交流放大,实现高增益而没有漂移。
探测器件采用国内器件,降低成本。
三型机的轴温计算采用新型的自适应轴温计算技术,定量测温,轴温计算准确。
能满足5~360公里/小时运行的列车轴温探测和热轴报警的需要。
自适应轴温计算技术使系统具有一定的自适应能力,以往的轴温计算技术以探头的状态和性能保持不变为基础,对硬件提出较高要求,而且若探头性能发生变化即需人工调整或维修。
而自适应轴温计算技术使轴温计算精度不受系统状态变化的影响,能够自动适应探头工作状态和性能的变化,适应探测器件响应率的变化,适应探头光学系统增益和电路增益的变化,弥补探头的不一致性,保证轴温计算准确。
三型机软件对异常波形进行处理,克服了由于探测器件对异常光源比较敏感而对测温和热轴预报的影响。
三型机的采集板采用智能方式,以80C552作为CPU,一块采集板可以进行单方向轴箱温度波形的采集和车号信息的采集,便于系统扩展。
三型机具有比较完善的自检,易于进行故障分析。
三型机与红外线测报中心及复示站的通讯方式与现有设备兼容,可直接与现有网络组网运行。
本章主要介绍探测站的内容,其它内容在《车辆运用与管理》中讲述。
一系统探测站构成及技术指标图10-1红外轴温探测系统探测站的组成1系统探测站构成探测站设备由轨边设备和轨边机房内设备组成,如图10-1。
ADP/ADS 系列2干泵使用说明书阿尔卡特高真空技术有限公司作为阿尔卡特集团的一部分,多年来一直为全球客户提供真空泵,检漏仪,真空计以及微加工系统等。
由于产品非常齐全,阿尔卡特高真空技术有限公司在各个行业都成为了非常重要的供应商,这些行业包括:仪器仪表,研发,一般工业和半导体等。
阿尔卡特高真空技术使用Adixen这个新品牌作为公司形象,在真空行业中占据其国际性重要地位。
我们法国公司分别通过了ISO 9001和ISO 14001认证,提供专业的服务和支持,同时Adixen产品具备最高的质量并符合环境标准。
阿尔卡特高真空技术有限公司拥有超过40年的经验,如今已成为一家全球性公司,在全球都拥有他的网络,包括在各地都有非常有经验的全职子公司,经销商以及代理等。
阿尔卡特高真空技术有限公司首先是在30年前在美国的Hingham-MA也建立了阿尔卡特产品中心,如今已经在美国的Fremont (CA)和Tempe (AZ)更增加了2个子公司。
在欧洲,阿尔卡特(法国)总部以及3个子公司,阿尔卡特(德国),阿尔卡特技术(英国)(位于苏格兰)再加上阿尔卡特系统(意大利)共同构成了整个欧洲网络。
在亚洲,我们在1993年成立了阿尔卡特真空技术(日本)并在1995年设立了阿尔卡特真空技术(韩国)。
随后,在2001年成立了阿尔卡特真空技术(台湾),阿尔卡特真空技术(新加坡),并于2004年成立了阿尔卡特高真空技术(上海)- 中国公司。
如今,阿尔卡特在全球各个地区共有超过40个代表处。
因此,无论发生什么情况,阿尔卡特的用户总是能够得到我们的真空技术专家提供的最快捷的支持!尊敬的客户:非常感谢您购买了阿尔卡特的干泵,我们非常荣幸您能够成为我们众多客户中的一员。
该产品得益于阿尔卡特多年以来在“半导体”工艺以及在干泵上的经验。
为了能够确保您使用的干泵拥有最优的性能并使您满意,我们建议您能够在使用该泵之前详细阅读该使用说明书,尤其是关于安装和开机的章节。
光电子技术复习题总结(2012.6.1)第一章:光的基础知识及发光源1.光的基本属性?光具有波动和粒子的双重性质,即具有波粒二象性。
2.激光的特性?(1)方向性好(2)单色性好(3)亮度高(4)相干性好3.玻尔假说:定态假设和跃迁假设?(1)定态假设;原子存在某些定态,在这些定态中不发出也不吸收电磁辐射能。
原子定态的能量只能采取某些分立的值E1、 E2 、……、En ,而不能采取其它值。
(2)跃迁假设;只有当原子从较高能量En的定态跃迁到较低能量Em的定态时,才能发射一个能量为h4.光与物质的共振相互作用的三种过程?受激吸收、自发辐射、受激辐射5.亚稳态?自发辐射的过程较慢时,粒子在E2能级上的寿命就长,原子处在这种状态就比较稳定。
寿命特别长的激发态称为亚稳态。
其寿命可达10-3~1s,而一般激发态寿命仅有10-8s。
6.受激辐射的光子性质?受激辐射的光子的频率、振动方向、相位都与外来光子一致。
7.受激吸收和受激辐射这两个过程的关系?宏观表现?两能级间受激吸收和受激辐射这两个相反的过程总是同时存在,相互竞争,其宏观效果是二者之差。
当吸收过程比受激辐射过程强时,宏观看来光强逐渐减弱;反之,当吸收过程比受激辐射过程弱时,宏观看来光强逐渐加强。
8.受激辐射与自发辐射的区别?最重要的区别在于光辐射的相干性,由自发辐射所发射的光子的频率、相位、振动方向都有一定的任意性,而受激辐射所发出的光子在频率、相位、振动方向上与激发的光子高度一致,即有高度的简并性。
9.光谱线加宽现象?由于各种因素影响,自发辐射所释放的光谱并非单色,而是占据一定的频率宽度,分布在中心频率v0附近一个有限的频率范围内,自发辐射的这种现象称为光谱线加宽。
10.谱线加宽的原因?由于能级有一定的宽度,所以当原子在能级之间自发发射时,它的频率也有一个变化范围△vn.11.谱线加宽的物理机制分为哪两大类?它们的区别?分为均匀加宽和非均匀加宽两大类。
AutolumiS 3000型化学发光分析仪温度控制系统的结构和功能分析姚继承; 丛海燕; 刘鹏; 袁晓燕; 曲业敏; 宋宇; 马淑青; 王明义【期刊名称】《《实用检验医师杂志》》【年(卷),期】2019(011)003【总页数】3页(P183-185)【关键词】AutolumiS3000型; 恒温控制; 模块化设计【作者】姚继承; 丛海燕; 刘鹏; 袁晓燕; 曲业敏; 宋宇; 马淑青; 王明义【作者单位】264200 山东威海威海市立医院中心实验室; 264200 山东威海威海威高生物科技有限公司【正文语种】中文全自动微粒子化学发光分析仪是临床检验实验室的基础设施之一,其结构复杂,功能完善,主要用于传染性疾病、内分泌激素、肿瘤标志物等检测,极大程度地降低了人为操作失误和主观判断因素的影响,检测结果客观准确[1-2]。
温度控制(温控)系统作为全自动化学发光分析仪的关键部件之一,可保证样本血清和试剂在特定温度条件下进行检测,这是为临床提供可靠医疗参考数据的前提,因此其对温度控制的精度和稳定性直接影响仪器的检测性能。
为保证样本反应及测量环节质量,获得精确的检验数据,在化学发光仪自主研制过程中对温控系统的性能提出更高的要求。
AutolumiS 3000 型化学发光分析仪采用模块化分区设计的新型温控系统,升温快速、加热均匀且稳定性好,现对AutolumiS 3000 型温控系统介绍如下。
1 温控系统总体结构为保证温度控制精度,最大限度地降低温度变化对样本检测带来的影响,AutolumiS 3000 型仪器使用新型温控装置系统,该温控系统采用模块化分区控制方法,分区主要包括孵育装载区、孵育区、回送装载区、试剂储存区和测量区等。
温控系统的独立设计提高了对温度的控制精度,避免了因温度变异引起的结果异常。
主板芯片可实现总温度动态控制,对温度进行实时监控,具有过热保护作用。
温控系统总体结构框架图见图1。
图1 温控系统总体结构框架图2 孵育温控模块2.1 孵育装载区孵育装载区是将左加样反应杯推送至孵育模块的装置,通过10W 56Ω 加热电阻和温度传感器控制,对加样样本和试剂进行加热,使温度保持为(37±1)℃。
第1章绪论1.半导体光电器件是利用什么效应制作的器件?答:利用半导体光电效应制成的器件。
2.半导体光电器件是哪两种粒子相互作用的器件?答:是一种利用光子与电子相互作用所具有的特性来实现某种功能的半导体器件。
3.半导体发光器件主要包括哪两种?答:(1)发光二极管;(2)半导体激光器。
4.光电器件主要有利用哪些效应制作的器件?答:光电器件主要有利用半导体光敏特性工作的光电导器件,利用半导体光伏打效应工作的光电池和半导体发光器件等。
5.什么是半导体发光器件?答:利用半导体PN结正向通过电时载流子注入复合发光的器件称为半导体发光器件。
6.光电探测器件是如何转换信号的器件?答:通过电子过程探测光信号的器件,即将射到它表面上的光信号转换为电信号。
7.光电检测器工作在反向偏置状态。
8.光电池是利用什么效应制作的?答:光伏打效应。
9. 光纤通信的两个重要窗口是哪些?答:1.55um和1.3um。
第2章1. 光信号的频率在哪个频段?需要用什么器件检测?答:光信号的频率在1014 Hz以上,常用的电子器件无法对这一频率段产生良好的响应,必须使用光电子器件。
2. 常用的光电检测器:PIN、APD3. 光电检测器的工作过程?答:光电检测器件的工作过程:(1)光吸收——(2)电子-空穴对产生——(3)载流子扩散和漂移——(4)检测4. 光信号(光束)入射到半导体材料后,如何产生电子空穴对?答:光信号(光束)入射到半导体材料后,首先发生的过程就是半导体材料对光子的吸收,吸收光子以后才能产生价带电子的跃迁,从而产生电子空穴对。
5. 半导体材料中的吸收过程可以分为哪两大类?答:本征吸收和非本征吸收6. 本征吸收又包括哪些?答:(1)直接吸收;(2)间接吸收7. 非本征吸收包括哪些?答:(1)激子吸收;(2)带内吸收;(3)杂质吸收8.本征吸收的必要条件?9.直接吸收中参与的粒子是什么?遵守哪两种守恒?答:只有电子和光子的参与,没有第3种粒子的参与。
第36卷,增刊红外与激光工程2007年6月、,01.36Suppl em ent I nf br cd孤d I as e r E n西noer i ng J un.2(X y7基于雪崩晶体管的多电流1550姗激光驱动电路赖艺平,蔡涛,彭志红,陈文颉(北京理工大学自动控制系,北京100081)摘要:设计了一种基于雪崩晶体管和可编程逻辑器件的多电流l550咖半导体激光驱动电路.该驱动电路包括多种大电窄脉冲生成电路、恒流与保护电路和温控电路三部分。
利用51单片机、可编程逻辑器件和雪崩晶体管实现数字式的多种大电流窄脉冲生成电路,易于控制与扩展。
恒流与保护电路则借助5l单片机的分段程序和高分辨率的数膜转换器实现,精度高。
而温控电路采取一种类Pw M的控制方式。
所设计的驱动电路精度高,实时性好,达到了设计要求.关键词:多电流;半导体激光器;雪崩晶体管;可编程逻辑器件中图分类号:T N216文献标识码l A文章编号:1007.2276(2007)增(激光)-0349—D4M ul t i-cur r ent1550nm l as er dr i订ng ci r cui t based onaval anche t rans i s t orsL m Y i-pi Il g,C A I1’a0,PE N G2尬-hong,C髓N w en-j i e∞e panm髓t of A ut o m al i c c伽n D l,B e日i ng hs廿t Il t e of伽hnol ogy’B蜘i吧10008l’al i na)A bst豫c t:T he desi gn of m ul d-cm T ent1550nm∞I I l i conduct or l懿er血vi ng c沁ll i t,incl udi ngm ul t i pl e l a唱e-cur r ent m田.ow pul s es gener at i on ci rcu“,c onst ant-c l l r r e nt and prot ect i on ci r cui t and t e m pem t ur e c on仃D l cnui t’i si nt川uced.硼t ll ut i l i够of I I l i c r ocon廿ol l er'C PLD锄d aval锄che t r锄si s t or'm ul t i pl e l a碍e-cur r entna舯w pul s es generat i on c毗ui t i s r eal i zed,w11i c h i s e勰y t o con仃D1锄d ext end.T he const aI l t-cu玎ent锄d pm t ect i o n c沁l l i t r each m gh pre c i s i on by us e of sub secn on pr ogr锄s aI l d l l i gh 陀s ol ut i on D,A convenor.A nd t em per at ur e cont r ol c疵ui t ut i l i z es a PW M—l i ke con仃ol n坨t hod.11地des i gned dri vi ng ci r cui t is p嗽i se锄d re a l一缸m e龇l d m cet SⅡl e re qui r e m ent s.K e y w ords:M ul t i—cun.ent;Se血conduct or l as er;A val a nche的nsi s衙;C PL DO引言半导体激光二极管以其高效、可靠性好、工作寿命长和可全固化等优良特性被越来越广泛地用于国防、科研、医疗、加工等领域‘¨。
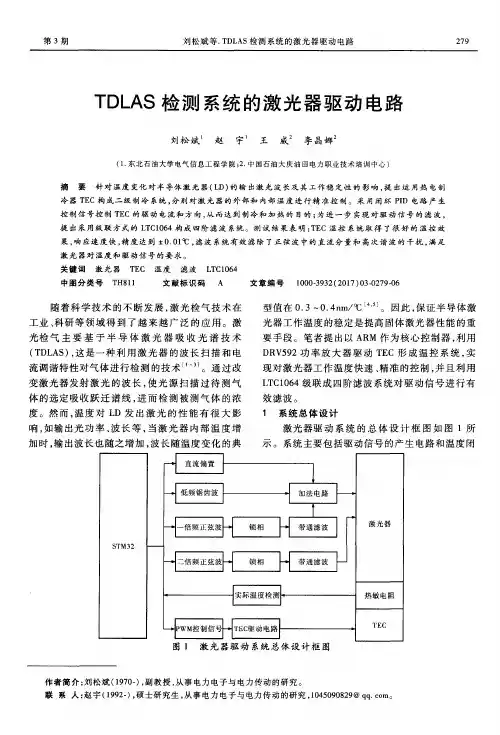
电子科技高精度半导体激光器自稳温控系统中国工程物理研究院流体物理研究所(绵阳621900 江孝国祁双喜王伟摘要文章介绍了一套精密的温度控制系统, 该控制系统采用PID 控制器的原理, 对发热功率为10~30W 的半导体激光器的控制效果良好, 控温的稳定度可小于±0. 1°C 。
关键词PID 控制器热电偶冷却器参数整定半导体激光器在民用及国防上的重要作用已得到广泛的应用, 但半导体激光器在工作时产生的大量热量, 不仅会使器件温度升高, 造成器件的性能下降, 严重者甚至烧毁半导体激光器, 因此, 激光器的散热是重要的, 为了保证器件性能的稳定及寿命, 将器件工作温度在一定的范围内以较高的稳定度稳定在比较低的水平上也同样重要[1]。
本文针对这种高精度的要求, 研制了一套精密的半导体激光器的温度控制系统。
该温度控制系统采用了传统的PID 调节原理, 针对系统的热传导特性, 在参数整定方面作了相应的改进, 达到了很好的控制效果, 不仅超调量小, 并且进入稳定区的时间短, 抗干扰能力也比较强。
该温度控制系统应用于10~30W 的发热负载的温度控制时, 可以在18~25图1PID 控制原理V (t , 实现对受控系统进行自动控制的目的, 它是一种线性调节器。
这种控制原理的优点是不要求知道受控系统的精确数学模型, 因此, 在自动控制领域中得到了广泛的应用。
由上可知, 要构成一个PID 控制器, 需要确定K p 、T i 、T d 三个参数; 确定这三个参数的过程称为PID 参数整定; 并且, 三个参数直接影响系统的控制性能。
°C 的温度范围内达到小于±0. 1°C 的稳定度, 起到了良好的控制作用。
本文主要介绍半导体温度控制器的PID 参数整定及改进等方面的工作。
2PID 参数的整定毫无疑问,PID 控制器的参数的整定应该根据实际系统的特性来进行, 一般有凑试法[2]及Ziegler 2Nichols 经验公式法[3]等。
凑试法主要是根据实际系统在现场以闭环的方式进行运行的情况, 由研究人员根据其丰富的经验来确定各参数的值, 并进行不断的调整, 最后达到良好的综合控制效果, 这种方法需要研究人员具有相关的丰富经验并通过现场实验来达到, 并不总是能够满足灵活的控制要求的。
Ziegler2Nichols 经验公式法则要先进一步, 它主要是1PID 原理简介[2]PID 控制原理主要是按照误差信号的比例、积分和微分值计算相应控制量, 并将其作为输入量传递到控制系统而实现自动控制的, 其控制模型为:V (t =K p e (t +tT id τ+T de (τdt(1其中:K p 为比例系数; T i 为积分系数; T d 为微分系数; e (t 为误差信号量, e (t =S -y (t , S 为受控量的设定值; y (t 为受控量的输出值; V (t 为控制信号量。
控制结构如图1所示。
PID 控制器把设定值S 与受控系统的受控量的实际值y (t 相减, 得到了一个误差量e (t , 误差量e (t 经比例、积分、微分运算针对带有纯时间延迟的一阶近似模型提出的, 该延迟环节的模型为:G (s =1+s T-sL(2在实际的整定中, 它首先要求测量出系统的阶跃响应, 如图2所示, 其次根据响应曲线求出图示的K 、L 、T 等系统的特性参数, 并假设α=KL /T , 再根后通过线性的组合而得到受控系统的控制输入量56(312 中国自动化http ://www. automation. com. cn 《电子技术》2002年第5期据表1的计算式计算出相应的PID 参数。
这种方法有较大的优点, 对于半导体激光器温控系统而言, 它是一个具有较大延迟的温度控制系统, 具有适用于Ziegler 2Nichols 公式法的特性, 并且该系统的实际阶跃响应曲线容易测量, 如图2所示; 其次, 不须经过大量的现场实验调试, 符合温控系统中半导体激光器件对调试工作条件的要求。
系统实际参数的整定结果见表1的本系统的PID 参数一栏所示。
表1Ziegler 2Nichols 设定算法[3]控制器类型K pv (t =K [βS -y (t ]+-T ddtT id τe (τ0(3其主要目的是减小超调量, 并将系统的超调量控制在10%或20%内, 因此引入系数β, 根据不同的超调量及系统的特性, 系数β的计算方法不一样, 本例中, 是按照小于10%的要求计算的, 具体的计算式为β=(533L ~86T /(577L ~34T [3]。
由此可见, 改进的Ziegler 2Nichols 方法不仅在参数上, 还在算法上与原PID 算法有较大的变化, 须重新编程完成。
PID 参数T iT dβP PI PID1/α0. 9α1. 2/α0. 63350. 653L 2L 2. 82. 8L /2本系统的PID 参数改进后的PID 参数0. 70. 70.0293图2温度控制系统的阶跃响应曲线3PID 参数及算法的改进由上述方法整定的参数一般能够达到控制的目的, 但有时在控制过程中存在一些不如意的地方, 如超调量过大、进入稳定区的时间过长, 甚至抗干扰能力不足等; 我们早先研制的系统存在一定的超调[4], 并且不太适用于宽范围的控制要求, 如热负载发生一定的变化时, 就达不到所要求的控制效果, 因此, 有必要改进控制的能力。
3. 1PID 参数的改进图3PID 参数整定及积分分离控制原理框图3. 2. 2积分饱和抑制方法[2]在PID 控制器中, 其中一项T i根据资料[3]的显示, 改进的Ziegler 2Nichols 方法整定的参数控制效果比直接由Ziegler 2Nichols 方法整定的参数要好, 并且, 它不要求进行更多的系统特性参数测试, 因此, 我们选用该方法并且稍作一些修改, 最后的结果见表1的改进后的PID 参数一栏, 其中的系数β是超调量小于10%的情况下的数值。
3. 2PID 算法的改进3. 2. 1PID 控制器结构的改变d τ与误差e (τ的积分有关, 称为积分项。
在实际的控制过程中, 如果由于负载变化引起误差发生突变, 导致正常控制量V (t 超过实际控制量的最大值V max , 由于实际控制量受到系统输出能力的限制, 其变化跟不上受控量的变化, 必然使误差比正常情况下更长时间地维持在正数, 这样, 使积分项得到很大的积累, 即使受控量大于设定值出现负误差, 但由于积分项的积累, 还必须经过较长一段时间才能使控制量小于最大值, 进入正常的控制范围, 在受控量的变化上表现为超调。
对于半导体激光器温度控制系统而言, 存(31357改进的Ziegler 2Nichols 方法要求如下的PID 控制器结构:《电子技术》2002年第5期中国传感器http ://www. sensor. com. cn在这种由于参数选择及算法选择不当而引起的超调现象, 并且半导体激光器的工作温度不允许超过一定值, 过大的超调是需要克服的一种现象。
我们选择积分分离法来抑制积分饱和现象的发生。
其核心思想是:在开始时, 不进行积分, 当误差达到一定值后, 按正常算法计算控制量, 可防止系统上电时积累过多的积分, 造成过大的控制量; 同时, 也能够在系统进入饱和区后由于较少的积分积累而很快地退出饱和区, 减少超调量。
结合改进的Ziegler 2Nichols 方法及积分饱和的抑制方法, 本温度控制器算法原理框图如图3所示。
器达到了很好的控制性能, 图4中的各图显示了在室温的环境及在18~25°C 的控温要求下对10~30W 的热负载的实际控制效果; 可以看出, 在热负载基本稳定的情况下, 本温控系统的超调较小, 能够平稳地进入平衡控制区, 且温控稳定度较高, 而图4(e 显示了热负载从10W 突变到30W 的控制情况, 温度变化范围只有约1°C 的大小, 可见达到了很好的抑制干扰的控制效果。
图中横座标为时间, 单位为秒。
5结束语本文研究的PID 控制器结合了改进的Zielger 2Nichols PID 参数的整定方法及采用了积分分离法来抑制超调现象的发生,该控制器完全达到了设计4实验结果经过多次的调试后, 该半导体激光器温度控制(a 环境温度25. 5°C , 设定温度17. 87°C(b 环境温度25. 7°C , 设定温度19. 83°C(c 环境温度26. 3°C , 设定温度19. 84°C(d 环境温度26. 5°C , 设定温度24. 79°C(e 环境温度26. 1°C , 设定温度24. 84°C ; 负载功率从10W 突变到30W图4温控系统的实际控制效果58(314 中国自动化http ://www. automation. com. cn 《电子技术》2002年第5期电子科技新型单键密码楼梯灯五邑大学(广东江门529020 陈业仙摘要文章主要论述利用常用的CD4017为核心组成的一个简单实用的单键密码楼梯灯。
关键词单键密码楼梯灯目前, 仍有很大一部分商品房, 尤其是早期的商品房没有设置公用梯灯, 有些家庭不得不自己安装楼梯灯, 市面上较流行使用的是一种用钥匙开启的带锁延时楼梯灯, 这种方法可以有效避免别人滥用自家的电灯, 但是仍存在不少缺点, 例如:由于钥匙必须带在身上, 容易丢失; 这种锁头一般质量较差, 暴露在室外容易氧化生锈而失效, 且外观笨重, 影响美观; 这种开关一般没有指示灯, 在晚上没有灯光时找钥匙以及开关的位置都颇为不便; 另外这种开关一旦启动后必须达到延时时间才能自动关闭。
本文设计的密码延时开关, 无需任何钥匙, 只要掌握密码, 便可对梯灯进行任意的开关动作, 且设有指示灯, 方便操作, 并且可以随时变更密码。
本设计电路简单, 成本低廉, 适于大批量生产, 并且可推广应用到其他类似的保密要求不是很高的电子密码锁等方面, 达到用一个公用的控制器控制各自电器的目的。
图1控制器的框图利用这一个高电平来启动与之相联的亮灯延时电路, 这样, 通过选择不同的输出端, 则可达到密码控制的作用。
这里, 我们还考虑了几种情况:第一, 如果输入错误或忘记了自己已按了多少次按键时, 电路应有自动复位的措施, 也就是对按键有监视电路; 第二, 当输入密码正确时, 电路应稍作延时才启动, 这样可以增加猜码的难度; 第三, 电路启动后, 计数器应及时复位, 但不会影响亮灯延时电路的继续工作, 但这时再按一次按键即可立即中断亮灯延时电路的工作, 使梯灯组熄灭, 故CD4017的第一次按键输出(Y1 保留作此用途, 即只有第2至第9按键共八个状态可供设为密码, 第10次按键回复至复位状态; 第四, 户内须设置一个直接启动亮灯延时电路的按钮, 无须输入密码。