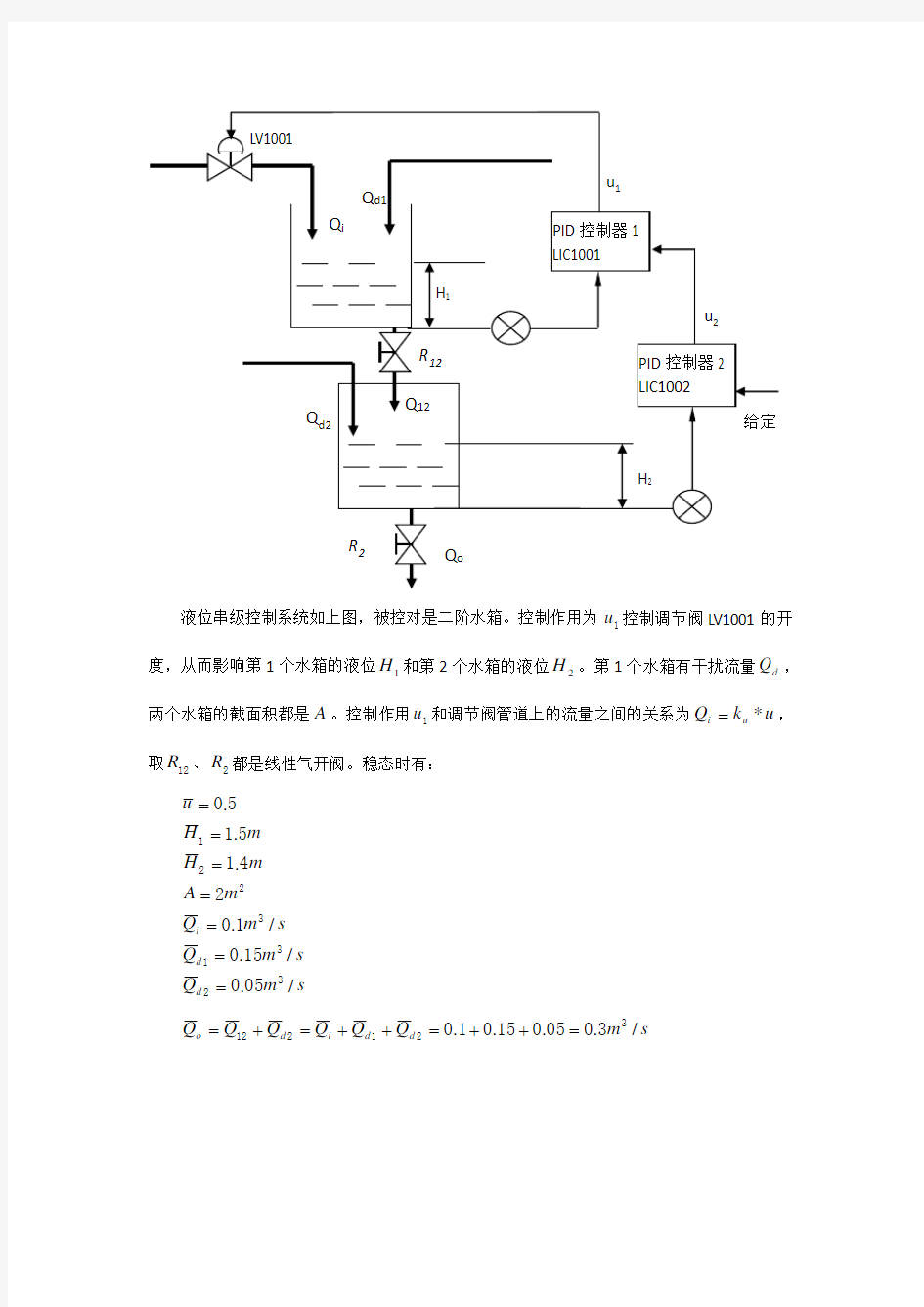

液位串级控制系统如上图,被控对是二阶水箱。控制作用为1u 控制调节阀LV1001的开度,从而影响第1个水箱的液位1H 和第2个水箱的液位2H 。第1个水箱有干扰流量d Q ,两个水箱的截面积都是A 。控制作用1u 和调节阀管道上的流量之间的关系为u k Q u i *=,取12R 、2R 都是线性气开阀。稳态时有:
s
m Q s m Q s m Q m A m H m H u d d i /././....32313221050150102415150=======
s m Q Q Q Q Q Q d d i d o /....3212123005015010=++=++=+=
s
m H Q s m H Q s m u Q k O i u /.../.../.. (522)
25211212
32535504
13020412051250205010===
======
αα
???
???
?==222
12
1
1222ααH R H R 为了编程,在MATLAB 中定义PID 模块结构为:
pidBlock=struct('blockName','LIC1001','direct',1,'AMC',
'MAN','SP',0,'PV',0,'MV',0,'Kc',0,'Ti',10000000000,'Td',0,'spanHig h',100,'spanLow',0,'E0',0,'E1',0,'E2',0);
解释如下:
pidBlock = struct(
'blockName','LIC1001', %PID 模块的名字 'direct',1, %PID 正反作用,direct=1表示反作用,direct=-1,表示正作用 'AMC', 'MAN', %PID 手动、自动、串级状态
% ‘AMC’=’MAN ’时,PID 处于手动 % ‘AMC’=’AUT ’时,PID 处于自动
% ‘AMC’=’CAS ’时,PID 是副回路调节器,处于串级
'SP',0, % PID 模块的给定值 'PV',0, % PID 模块的测量值 'MV',0, %PID 模块的控制作用 'Kc',0, %PID 模块的比例系数 'Ti',10000000000, %PID 模块的积分时间 'Td',0, %PID 模块的微分时间 'spanHigh',100, %PID 模块的PV 值的量程上限 'spanLow',0, %PID 模块的PV 值的量程下限 'E0',0, %PID 增量算法中的最新误差值 'E1',0, %PID 增量算法中的上一步误差值 'E2',0 %PID 增量算法中的上上一步误差值 );
1. 画出该控制系统的结构图;
2. 建立各环节的传递函数模型;
3. 推导PID 增量算法;
4. 以指定的结构编写PID 控制的子程序,要求要用M 语言编制,并且编程时要考虑手自
动状态、串级状态、正反作用、无扰切换.
提示如下:
主程序中定义两个pidblock,如:
pidBlock(1)=struct('blockName','LIC1001','direct',1,'AMC',
'MAN','SP',0,'PV',0,'MV',0,'Kc',0,'Ti',10000000000,'Td',0,'spanHig h',100,'spanLow',0,'E0',0,'E1',0,'E2',0);
pidBlock(2)=struct('blockName','LIC1002','direct',1,'AMC',
'MAN','SP',0,'PV',0,'MV',0,'Kc',0,'Ti',10000000000,'Td',0,'spanHig h',100,'spanLow',0,'E0',0,'E1',0,'E2',0);
…………………….
%begin loop
pidBlock(1).SP =……
pidBlock(2).SP =……
pidBlock(1).PV =模型计算
pidBlock(1).SP =模型计算
计算控制作用
pidBlcok(1) = pid_function(pidBlock(1));
……………….
那么子程序在文件pid_function.m中:
function pidblock = pid_function(pidblockStruct)
pidblock = pidblockStruct;
pidblock.E2 = pidblock.E1;
pidblock.E1 = pidblock.E0;
pidblock.E0 = pidblock.SP – pidblock.PV;
if pidblock.AMC = ‘AUT’| pidblock.AMC = ‘CAS’
pidblock.MV=增量算法
End If
if pidblock.AMC = ‘MAN’
pidblock.SP = pidblock.PV;
End If
…………………………….
5. 对副回路进行整定,要有整定过程和整定曲线。
6. 对主回路进行整定,要有整定过程和整定曲线。
7. 在第5、6的基础上,将控制系统投入自动,主回路给定值做10%的阶跃,给出液位2
H 响应曲线的形状;第2个水箱的干扰2d Q 变化10%,给出液位2H 响应曲线的形状。 8. 针对第2个水箱的干扰2d Q ,设计静态前馈控制器,第2个水箱的干扰2d Q 变化10%,
给出液位2H 响应曲线的形状。
要求:
(1) 以电子版提交大作业到我邮箱,截止日期到2月5日,过期不候,雷同的、不交的肯
定不及格。
(2) 编程不能用SIMULINK 搭建,要求用MATLAB 的M 语言编程。要求附上相应程序和相应
曲线。
过程控制大作业
1.该系统的结构图
s
H 2?
图一
2.各环节的传递函数模型
在工作点附近,由物料守恒得:
???
???
??-?+?=??-?+?=?021221211)()(Q
Q Q dt H d A Q Q Q dt H d A d d i (1) 线性化的微分方程为:
???
?
??
?-?+?=??+?-?=?)
(1)()(1)(222
121211211R H Q R H A dt H d Q R H u k A dt H d d d u (2) 写成矩阵的形式:
???????????????????
??
????+????????????????????-=??2121212
1210001
A 1-101d d u
Q Q u A A A k H H R AR AR H (3) 对上式取拉氏变换
可知:???
?????++?+=??++?+=?22211221222
112
12
12121
111d d u Q AS R R H R AS R R R H Q AS R R u AS R k R H (4)
将(4)带入原理结构图,则控制系统的结构图:
s
H 2?图二
3.位置式PID 控制算法
0)]1()([)()(])
1()()()([)(u k e k e K i e K k e K u T k e k e T i e T T
k e K k u k
i d i p k
i s
d
i
s
p +--++=+--++=∑∑==
式中
p K ------比例系数
i
s
p i T T K K =--------积分系数
s
d
p d T T K K =
--------微分系数 增量式PID 控制算法
)]
2()1(2)([)()()]2()1(2)([)()]1()([)
1()()(-+--++?=-+--++--=--=?k e k e k e K k e K k e K k e k e k e K k e K k e k e K k u k u k u d i p d i p 4.程序见附录一 5.对副回路进行整定
副回路的结构图如下:
图三
程序见附录二,采用临界比例度法整定PID 参数:将系统构成纯比例控制,由大到小改变比例度,观察系统的闭环相应曲线,图四为比例度为%10=δ、%2=δ、%1=δ、%9.0=δ的单位阶跃响应曲线。由图可知,当75.7、%1==K δ时,系统输出响应出现等幅振荡,临界比例度%1=s δ,临界振荡周期s T s 6.0=。
图四
根据临界比例度%1=δ,临界振荡周期s T s 6.0=,根据经验公式可确定不同控制规律下的调节其参数。采用比例积分微分(PID )调节器:%1=δ,
s s T d i 075.0T 、3.0== 。系统响应曲线如下图:
图五
6.主回路进行整定
主回路也采用临界比例度法整定PID 参数,将副回路和第二个水箱看成广义对象,结构图如下:
图六
对图六构成的闭环系统,首先采用纯比例控制,由大到小改变比例度,观察系统的闭环相应曲线。下图为比例度为%20=δ、%10=δ、%35.7=δ、%5=δ的单位阶跃响应曲线。由图七可知,当0.8、%35.7==p K δ时,系统输出响应出现等幅振荡,临界比例度%35.7=s δ,临界振荡周期s T s 8.0=。
图七
根据临界比例度%35.7=δ,临界振荡周期s T s 8.0=,根据经验公式可确定不同控制规律下的调节其参数。采用比例积分微分(PID )调节器:%35.7=δ,
s s T d i 1.0T 、2== 。系统响应曲线如下图:
图八
7.控制系统投入自动后液位H2的响应曲线
本程序中给的液位给定值是绝对高度的百分比,而不是在工作点附近的増量的绝对高度,第二个水箱的稳态液位H2=1.4m,而水箱的上限是 2.52m,所以把实际液位高度转化成0-100%的数时,初始液位应给是55.5%,当给定值做10%的阶跃时,给定值pidBlock(2).SP=65。 液位H2响应曲线为:
图九
稳态时,第二个水箱的干扰
s m Q d /05.032=,干扰量增加10%后,
s m Q d /055.032=。干扰量减少10%后,s m Q d /045.032=。
干扰量增加10%后,液位H2响应曲线:
图十
干扰量减少10%后,液位H2响应曲线:
图十一
8.前馈控制器
针对第2个水箱的干扰Qd2,设计静态前馈控制器。增加前馈控制器后,系统的结构图为:
s
H 2?
图十二
干扰变化前液位H2的响应曲线:
图十三
干扰Qd2增加10%后,液位H2响应曲线:
图十四
由图十三和图十四对比可知,针对第2个水箱的干扰设计前馈控制器后,第2个水箱的干扰变化对液位H2无影响。
附录一:
pid_function.m
function pidblock=pid_function(pidblockStruct,u)
pidblock=pidblockStruct;
pidblock.E2=pidblock.E1;
pidblock.E1=pidblock.E0;
pidblock.E0=pidblock.SP-pidblock.PV;
%手自动切换
if pidblock.AMC=='AUT'|pidblock.AMC=='CAS'
pidblock.MV=u;
end
if pidblock.AMC=='MAN'
pidblock.MV=pidblock.SP;
end
main.m
clear
clc
pidBlock(1)=struct('blockName','LIC1002','direct',1,'AMC','AUT','SP', 0,'PV',0,'MV',0,'Kc',58,'Ti',0.3,'Td',0.075,'spanHigh',2.52,'spanLow' ,0,'E0',0,'E1',0,'E2',0);
pidBlock(2)=struct('blockName','LIC1001','direct',1,'AMC','AUT','SP', 70,'PV',0,'MV',0,'Kc',8,'Ti',2,'Td',0.1,'spanHigh',2.52,'spanLow',0,' E0',0,'E1',0,'E2',0);
%部分参数的值
H1=1.5;H2=1.4;
ku=0.2;A=2;
R12=2*sqrt(1.5)/0.20412;
R2=2*sqrt(1.4)/0.21129;
ts=0.1;
Qd1=0.15;Qd2=0.05;
%第一个水箱离散化
sys1=tf(R12*ku,[R12*A,1]);
dsys1=c2d(sys1,ts,'z');
[num1,den1]=tfdata(dsys1,'v');
%第二个水箱离散化
sys2=tf(R2,[R12*R2*A,R12]);
dsys2=c2d(sys2,ts,'z');
[num2,den2]=tfdata(dsys2,'v');
%扰动Qd1
sys3=tf(R12*Qd1,[R12*A,1]);
dsys3=c2d(sys3,ts,'z');
[num3,den3]=tfdata(dsys3,'v');
%扰动Qd2
sys4=tf(R2*Qd2,[R2*A,1]);
dsys4=c2d(sys4,ts,'z');
[num4,den4]=tfdata(dsys4,'v');
%前馈控制器
sys5=-sys4;
dsys5=c2d(sys5,ts,'z');
[num5,den5]=tfdata(dsys5,'v');
%初值
w=0;u1_1=0.5;u2_1=0;h1_1=0;h2_1=0;dh1_1=0;dh2_1=0;dh2f_1=0;
pidBlock(1).SP=pidBlock(1).SP/100*(pidBlock(1).spanHigh-pidBlock(1).s panLow)+pidBlock(1).spanLow-H1;%H1的实际偏差输入值
pidBlock(2).SP=pidBlock(2).SP/100*(pidBlock(2).spanHigh-pidBlock(2).s panLow)+pidBlock(2).spanLow-H2;%H2的实际偏差输入值
%程序
for k=1:1:1000
rin(k)=1;
time(k)=k*ts;
du1(k)=pidBlock(2).Kc*[(pidBlock(2).E0-pidBlock(2).E1)+ts/pidBlock(2) .Ti*pidBlock(2).E0+pidBlock(2).Td*(pidBlock(2).E0-2*pidBlock(2).E1+pi dBlock(2).E2)/ts];
u1(k)=u1_1+du1(k);
du2(k)=pidBlock(1).Kc*[(pidBlock(1).E0-pidBlock(1).E1)+ts/pidBlock(1) .Ti*pidBlock(1).E0+pidBlock(1).Td*(pidBlock(1).E0-2*pidBlock(1).E1+pi dBlock(1).E2)/ts];
u2(k)=u2_1+du2(k);
dh1(k)=-den3(2)*dh1_1+num3(2)*Qd1;%扰动Qd1的输出
dh2(k)=-den4(2)*dh2_1+num4(2)*Qd2;%扰动Qd2的输出
dh2f(k)=-den5(2)*dh2f_1+num5(2)*Qd2;%前馈控制器输出
h1(k)=-den1(2)*h1_1+num1(2)*pidBlock(1).MV*pidBlock(1).direct+dh1(k); %h2(k)=-den2(2)*h2_1+num2(2)*h1(k)*pidBlock(2).direct+dh2(k);无前馈控制器
h2(k)=-den2(2)*h2_1+num2(2)*h1(k)*pidBlock(2).direct+dh2(k)+dh2f(k);%有前馈控制器
pidBlock(2).PV=h2(k);
pidBlock(2)=pid_function(pidBlock(2),u1(k));
pidBlock(1).SP=u1(k);
pidBlock(1).PV=h1(k);
pidBlock(1)=pid_function(pidBlock(1),u2(k));
dh1_1=dh1(1);
dh2_1=dh2(k);
dh2f_1=dh2f(k);
u1_1=u1(k);
u2_1=u2(k);
h1_1=h1(k);
h2_1=h2(k);
%将求出的h(1),h(2)化为百分数
y1(k)=(h1(k)+H1-pidBlock(2).spanLow)/(pidBlock(2).spanHigh-pidBlock(2 ).spanLow)*100;
y2(k)=(h2(k)+H2-pidBlock(1).spanLow)/(pidBlock(1).spanHigh-pidBlock(1 ).spanLow)*100;
end
plot(time,y2);
xlabel('时间/s');
ylabel('第二个水箱液位H2');
title('扰动Qd2变化前的阶跃响应曲线');
grid
附录二
副回路整定程序
clear
clc
%部分参数值
H1=1.5;H2=1.4;
ku=0.2;A=2;
R12=2*sqrt(1.5)/0.20412;
R2=2*sqrt(1.4)/0.21129;
ts=0.1;
Qd1=0.15;Qd2=0.05;
%第一个水箱离散化
sys1=tf(R12*ku,[R12*A,1]);
dsys1=c2d(sys1,ts,'z');
[num1,den1]=tfdata(dsys1,'v');
%初值
w=0;u1_1=0.5;u2_1=0;h1_1=0;h2_1=0;dh1_1=0;dh2_1=0;dh2f_1=0; u_1=0;y_1=0;x=[0 ,0,0]';e0=0;e1=0;e2=0;
%程序
for k=1:1:80
time(k)=k*ts;
rin(k)=1;
kp=30;
ki=4;
kd=10;
du(k)=kp*x(1)+kd*x(2)+ki*x(3);
u(k)=u_1+du(k);
yout(k)=-den1(2)*y_1+num1(2)*u_1;
e0=rin(k)-yout(k);
u_1=u(k);
y_1=yout(k);
x(1)=e0-e1;
x(2)=e0-2*e1+e2;
x(3)=e0;
e2=e1;
e1=e0;
end
plot(time,rin,'b',time,yout,'r');
xlabel('时间/s');
ylabel('水箱液位');
title('副回路响应曲线');
grid
DCS实训报告双容水箱液位串级控制系统
一、实训目的 (1)、熟悉集散控制系统(DCS)的组成。 (2)、掌握MACS组态软件的使用方法。 (3)、培养灵活组态的能力。 (4)、掌握系统组态与装置调试的技能。 二、实训内容及要求 以THSA-1型生产过程自动化技术综合实训装置为工业对象。完成中水箱和下水箱串级液位控制系统的组态。 要求:设计液位串级控制系统,并用MACS组态软件完成组态。 包括:(1)、数据库组态。 (2)、设备组态。 (3)、算法组态。 (4)、画面组态。 (5)、在实验装置上进行系统调试。 三、工程分析 THSA-1型生产过程自动化技术综合实训装置中水箱和下水箱串级液位控制系统需要2个输入测量信号,1个输出控制信号。 因此,该系统包括: (1)、该系统有2个AI点LT1、LT2,1个AO点LV1。 (2)、该系统需要1个模拟量输入模块FM148用于采集中水箱液位信号LT1和下水箱液位信号LT2;1个模拟量输出模块
FM151用于控制电动控制阀的开度LV1。并且FM148的设备号为2号,FM151的设备号为3号。 (3)、LT1按2号设备的第1通道,LT2按2号设备的第2通道。LV1按3号设备的第1通道。 (4)、系统配备1个现场控制站10站,1台服务器兼操作员站。 四、实训步骤 1、工程的建立 (1)、打开:开始macsv组态软件数据库总控。(2)、选择工程/新建工程,新建工程并输入工程名;Demo。(3)、点击“确定”按钮,然后在空白处选择“demo”工程。工程信息如下图所示: (4)、选择“编辑>域组号组态”,选择组号为1,将刚创建的工程“demo”从“未分组的域”移到右边“改组所包含的域”里,点击“确认”按钮。然后,在数据库总控组态软件窗口会出现当前工程名、当前域号、该域分组号、系统总点数。 (5)、数据库组态。
三容水箱液位过程控制设计 专业:自动化 班级:2011级4班 组员:孙健 组员:姜悦2 组员:黄潇20115041 指导老师:陈刚 重庆大学自动化学院 2015年1月
目录 一、现代工业背景 (1) 二、问题的提出 (2) 三、模型的建立 (3) 3.1 单容水箱的数学模型 (3) 3.2 双容水箱的数学模型 (5) 3.3 三容水箱模型 (6) 四、算法的描述 (8) 4.1对原始模型的仿真 (8) 4.2添加P控制并对其仿真 (9) 4.3添加单回路控制并对其仿真 (10) 4.4添加PID控制和单回路控制并对其仿真 (11) 五、结果及分析 (14) 六、总结与体会 (15) 6.1 组长孙健的总结 (15) 6.2 组员姜悦的总结 (15) 6.3 组员黄潇的总结 (15) 七、参考文献 (17) 八、附录 (18)
一、现代工业背景 世界上任何国家的经济发展,都伴随着人民生活水平的改善和城市化进程的不断加快。但是相应的淡水资源的需求和消耗也在不断增多。水,作为一种必不可少的资源,长期以来一直被认为是取之不尽、用之不竭的。在这种观点的驱使下,水环境的质量越来越恶劣、水资源短缺也越来越严重,这一切都加重了城市的负荷,带来一系列危及城市生存与发展的生态环境问题。污水也是造成环境污染的来源之一。这个污染源的出现引起了世界各国政府的关注,治理水污染环境的课题被列入世界环保组织的工作日程。 建设污水处理厂,消除水污染也是为人民造福的一项事业,政府一时又拿不出巨大的资金投入到治理项目的建设中去。为了使污染快速得到控制,向公民投放建设专项债券,给公民一定的高于银行存款利息的待遇,使公民的资金投入到基础设施建设,发挥这部分资金的作用,也能为政府解除一些资金筹措的忧虑,又体现了全民的环保意识。 现代污水处理技术,按处理程度划分,可分为一级、二级和三级处理。 一级处理,主要去除污水中呈悬浮状态的固体污染物质,物理处理法大部分只能完成一级处理的要求。经过一级处理的污水,BOD一般可去除30%左右,达不到排放标准。一级处理属于二级处理的预处理。 二级处理,主要去除污水中呈胶体和溶解状态的有机污染物质(BOD,COD物质),去除率可达90%以上,使有机污染物达到排放标准。 三级处理,进一步处理难降解的有机物、氮和磷等能够导致水体富营养化的可溶性无机物等。主要方法有生物脱氮除磷法,混凝沉淀法,砂滤法,活性炭吸附法,离子交换法和电渗分析法等。 整个过程为通过粗格栅的原污水经过污水提升泵提升后,经过格栅或者砂滤器,之后进入沉砂池,经过砂水分离的污水进入初次沉淀池,以上为一级处理(即物理处理),初沉池的出水进入生物处理设备,有活性污泥法和生物膜法,(其中活性污泥法的反应器有曝气池,氧化沟等,生物膜法包括生物滤池、生物转盘、生物接触氧化法和生物流化床),生物处理设备的出水进入二次沉淀池,二沉池的出水经过消毒排放或者进入三级处理,一级处理结束到此为二级处理,三级处理包括生物脱氮除磷法,混凝沉淀法,砂滤法,活性炭吸附法,离子交换法和电渗析法。二沉池的污泥一部分回流至初次沉淀池或者生物处理设备,一部分进入污泥浓缩池,之后进入污泥消化池,经过脱水和干燥设备后,污泥被最后利用。 经济发展与水环境污染是成正比的,也就是说经济发展的速度越快,相应带来的水环境污染就越严重。人民生活离不开水,工农业生产发展更离不开水,排出来的无论是生活污水还是工业废水都会带来不同程度的污染。经济的发展是需要资金投入的,保护环境不受污染,同样也需要钱,当资金有限的时候,就需要将经济发展和保护环境这两项硬指标进行有机的协调,不能造成顾此失彼或厚此薄彼的局面。若顾经济发展失环境保护,就会产生环境严重受到污染,再投入相当的资金也不会治理到原来的清洁环境。国外的反面教训警示了我们,日本的伊势湾受到沿海石化生产废水的污染,使伊势湾的水产品受到严重的损失,产生了不能食用的后果,虽经多年的治理也难以恢复污染前的环境状况。这也充分证明了经济发展与环境保护的密切关系。
本论文主要研究如何根据用户要求的性能指标进行自动控制系统的串联校正设计,而此设计又具有很重要的现实意义。对于给定的线性定常系统,我们通常通过加入串联超前、滞后或超前滞后综合校正装置,以达到提高系统的精度和稳定性的目的。本文将给出基于频率特性法串联校正的具体设计方法,同时对该课题中的控制系统模型进行仿真。本设计可实现如下功能:对一个线性定常系统,根据需求的性能指标,通过本设计可给出系统的串联校正网络,从绘制出的各种响应曲线可以直观地将校正前后的系统进行比较,而仿真实例结果也进一步表明了此设计方法有效性和实用性。 关键词:串联校正;根轨迹;频率特性法;MATLAB 1.1研究目的 在实际工程控制中,往往需要设计一个系统并选择适当的参数以满足性能 指标的要求,或对原有系统增加某些必要的元件或环节,使系统能够全面满足 性能指标要求,此类问题就称为系统校正与综合,或称为系统设计。 当被控对象给定后,按照被控对象的工作条件,被控信号应具有的最大速 度和加速度要求等,可以初步选定执行元件的形式、特性和参数。然后,根据 测量精度、抗扰能力、被测信号的物理性质、测量过程中的惯性及非线性度等 因素,选择合适的测量变送元件。在此基础上,设计增益可调的前置放大器与 功率放大器。这些初步选定的元件以及被控对象适当组合起来,使之满足表征 控制精度、阻尼程度和响应速度的性能指标要求。如果通过调整放大器增益后 仍然不能全面满足设计要求的性能指标,就需要在系统中增加一些参数及特性 可按需要改变的校正装置,使系统能够全面满足设计要求,这就是控制系统设 计中的校正问题。系统设计过程是一个反复试探的过程,需要很多经验的积累。MATLAB为系统设计提供了有效手段。 1.2相关研究现状 系统仿真作为一种特殊的实验技术,在20世纪30-90年代的半个多世纪中经历了飞速发展,到今天已经发展成为一种真正的、系统的实验科学。自动控制系统仿真是系统仿真的一个重要分支,它是一门设计自动控制理论、计算机数学、计算机技术、系统辩识以及系统科学的综合性新型学科。它为控制系统的分析、计算、研究、综合设计以及自动控制系统的计算机辅助教学等提供了快速、经济、
内蒙古科技大学 控制系统仿真课程设计说明书 题目:双容水箱液位控制系统 仿真 学生姓名:任志江 学号:1067112104 专业:测控技术与仪器 班级:测控 10-1班 指导教师:梁丽
摘要 随着工业生产的飞速发展,人们对生产过程的自动化控制水平、工业产品和服务产品质量的要求也越来高。每一个先进、实用控制算法和监测算法的出现都对工业生产具有积极有效的推动作用。然而,当前的学术研究成果与实际生产应用技术水平并不是同步的,通常情况下实际生产中大规模应用的算法要比理论方面的研究滞后几年,甚至有的时候这种滞后相差几十年。这是目前控制领域所面临的最大问题,究其根源主要在于理论研究尚缺乏实际背景的支持,一旦应用于现场就会遇到各种各样的实际问题,制约了其应用。本设计设计的课题是双容水箱的PID液位控制系统的仿真。在设计中,主要针对双容水箱进行了研究和仿真。本文的主要内容包括:对水箱的特性确定与实验曲线分析,通过实验法建立了液位控制系统的水箱数学模型,设计出了控制系统,针对所选液位控制系统选择合适的PID算法。用MATLAB/Simulink建立液位控制系统,调节器采用PID控制系统。通过仿真参数整定及各个参数的控制性能,对所得到的仿真曲线进行分析,总结了参数变化对系统性能的影响。 关键词:MATLAB;PID控制;液位系统仿真
目录 第一章控制系统仿真概述 (2) 1.1 控制系统计算机仿真 (2) 1.2 控制系统的MATLAB计算与仿真 (2) 第二章 PID控制简介及其整定方法 (6) 2.1 PID控制简介 (6) 2.1.1 PID控制原理 (6) 2.1.2 PID控制算法 (7) 2.2 PID 调节的各个环节及其调节过程 (8) 2.2.1 比例控制与其调节过程 (8) 2.2.2 比例积分调节 (9) 2.2.3 比例积分微分调节 (10) 2.3 PID控制的特点 (10) 2.4 PID参数整定方法 (11) 第三章双容水箱液位控制系统设计 (12) 3.1双容水箱结构 (12) 3.2系统分析 (12) 3.3双容水箱液位控制系统设计 (15) 3.3.1双容水箱液位控制系统的simulink仿真图 (15) 3.3.2双容水箱液位控制系统的simulink仿真波形 (16) 第四章课程设计总结 (17)
Matlab在机械工程控制中的应用 姓名:xxx 学号:2010232 专业:机械制造及其自动化
Matlab在机械工程控制中的应用 摘要:MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。 一、机械工程控制简介 机械控制工程是研究控制论在机械工程中应用的科学。它是一门跨控制论和机械工程的边缘学科。随着工业生产和科学技术的不断向前发展,机械工程控制论这门新兴学科越来越为人们所重视。他不仅满足今天自动化技术高度发展的需要,同时也与信息科学和系统科学紧密相关,更重要的是它提供了辩证的系统分析方法,即不但从局部,而且从整体上认识和分析机械系统,改进和完善机械系统,以满足科技的发展和工业生产的实际需要。 1.1机械工程控制论的研究对象与任务 机械工程控制论的研究对象是机械工程技术中广义系统的动力学问题。具体地讲,机械控制路是研究系统及其输入、输出三者之间的动态关系,也就是研究机械工程广义系统在一定的外界条件下,从系统的一定初始条件出发,所经历有内部的固有属性所决定的整个动态历程。就系统及其输入、输出三者之间动态关系而言,机械工程控制论的任务主要研究一下几方面的为题: (1)当系统已定,输入已知时,求出系统的输出(响应),并通过输出来研究系统本身的有关为题,称系统分析。 (2)当系统已定,系统的输出也已给定是,要确定系统的输出尽可能符合给定的最佳要求,称系统的最优控制。 (3)当输入已知输出也一给定时,要确定系统,使其可能符合给定的最佳要求,称最优设计。 (4)当输入和输出均已知时,求系统的结构参数,即建立系统的数学模型,称系统的便是或系统识别。 (5)当系统已定输出已知时,要识别输出输出输入的有关信息,成滤波与预测。
双容水箱液位控制系统 郭晨雨
目录 摘要 --------------------------------------------------------------------------- 错误!未定义书签。 一.PID控制原理、优越性,对系统性能的改善----------------- 错误!未定义书签。二.被控对象的分析与建模--------------------------------------------- 错误!未定义书签。 三.PID参数整定方法概述---------------------------------------------- 错误!未定义书签。 PID控制器中比例、积分和微分项对系统性能影响分析错误!未定义书签。 比例作用 --------------------------------------------------------- 错误!未定义书签。 积分作用 --------------------------------------------------------- 错误!未定义书签。 微分作用 --------------------------------------------------------- 错误!未定义书签。 PID参数的整定方法 ------------------------------------------------ 错误!未定义书签。 临界比例度法 ------------------------------------------------------- 错误!未定义书签。 PID参数的确定 ----------------------------------------------------- 错误!未定义书签。 四.控制结构 ---------------------------------------------------------------- 错误!未定义书签。 利用根轨迹校正系统 ----------------------------------------------- 错误!未定义书签。 利用伯德图校正系统 ----------------------------------------------- 错误!未定义书签。 调整系统控制量的模糊PID控制方法------------------------- 错误!未定义书签。 模糊控制部分----------------------------------------------------- 错误!未定义书签。 PID控制部分 ---------------------------------------------------- 错误!未定义书签。五.控制器的设计---------------------------------------------------------- 错误!未定义书签。 六.仿真结果与分析--------------------------------------------------------- 错误!未定义书签。 七.结束语---------------------------------------------------------------------- 错误!未定义书签。参考文献 ---------------------------------------------------------------------- 错误!未定义书签。
XXXX大学 电子信息工程学院 专业硕士学位研究生综合实验报告 实验名称:双容水箱液位定值控制系统专业:控制工程 姓名: XXX 学号:XXXXXX 指导教师: XXX 完成时间:XXXXX
实验名称:双容水箱液位定值控制系统 实验目的: 1.通过实验进一步了解双容水箱液位的特性。 2.掌握双容水箱液位控制系统调节器参数的整定与投运方法。 3.研究调节器相关参数的改变对系统动态性能的影响。 4.研究P、PI、PD和PID四种调节器分别对液位系统的控制作用。 5.掌握双容液位定值控制系统采用不同控制方案的实现过程。 实验仪器设备: 1.实验对象及控制屏、SA-11挂件一个、SA-13挂件一个、SA-14挂件一个、计算机一台(DCS需两台计算机)、万用表一个; 2.SA-12挂件一个、RS485/232转换器一个、通讯线一根; 3.SA-21挂件一个、SA-22挂件一个、SA-23挂件一个; 4.SA-31挂件一个、SA-32挂件一个、SA-33挂件一个、主控单元一个、数据交换器两个,网线四根; 5.SA-41挂件一个、CP5611专用网卡及网线; 6.SA-42挂件一个、PC/PPI通讯电缆一根。 实验原理: 本实验以中水箱与下水箱串联作为被控对象,下水箱的液位高度为系统的被控制量。要求下水箱液位稳定至给定量,将压力传感器LT2检测到的中水箱液位信号作为反馈信号,在与给定量比较后的差值通过调节器控制电动调节阀的开度,以达到控制下水箱液位的目的。为了实现系统在阶跃给定和阶跃扰动作用下的无静差控制,系统的调节器应为PI或PID控制。调节器的参数整定可采用本章第一节所述任意一种整定方法。本实验系统结构图和方框图如图所示。
双容水箱液位串级控制系统课程设计 1. 设计题目 双容水箱液位串级控制系统设计 2. 设计任务 图1所示双容水箱液位系统,由水泵1、2分别通过支路1、2向上水箱注水,在支路一中设置调节阀,为保持下水箱液位恒定,支路二则通过变频器对下水箱液位施加干扰。试设计串级控制系统以维持下水箱液位的恒定。 1 图1 双容水箱液位控制系统示意图 3. 设计要求 1) 已知上下水箱的传递函数分别为: 111()2()()51p H s G s U s s ?==?+,22221()()1()()()201 p H s H s G s Q s H s s ??===??+。 要求画出双容水箱液位系统方框图,并分别对系统在有、无干扰作用下的动态过程进行仿真(假设干扰为在系统单位阶跃给定下投运10s 后施加的均值为0、方差为0.01的白噪声); 2) 针对双容水箱液位系统设计单回路控制,要求画出控制系统方框图,并分别对控制系统在有、无干扰作用下的动态过程进行仿真,其中PID 参数的整定要求写出整定的依据(选择何种整定方法,P 、I 、D 各参数整定的依据如何),对仿真结果进行评述; 3) 针对该受扰的液位系统设计串级控制方案,要求画出控制系统方框图及实施方案图,对控制系统的动态过程进行仿真,并对仿真结果进行评述。 4.设计任务分析
系统建模基本方法有机理法建模和测试法建模两种,机理法建模主要用于生产过程的机理已经被人们充分掌握,并且可以比较确切的加以数学描述的情况;测试法建模是根据工业过程的实际情况对其输入输出进行某些数学处理得到,测试法建模一般较机理法建模简单,特别是在一些高阶的工业生产对象。对于本设计而言,由于双容水箱的数学模型已知,故采用机理建模法。 在该液位控制系统中,建模参数如下: 控制量:水流量Q ; 被控量:下水箱液位; 控制对象特性: 111()2()()51 p H s G s U s s ?==?+(上水箱传递函数); 22221()()1()()()201p H s H s G s Q s H s s ??= ==??+(下水箱传递函数)。 控制器:PID ; 执行器:控制阀; 干扰信号:在系统单位阶跃给定下运行10s 后,施加均值为0、方差为0.01的白噪声 为保持下水箱液位的稳定,设计中采用闭环系统,将下水箱液位信号经水位检测器送至控制器(PID ),控制器将实际水位与设定值相比较,产生输出信号作用于执行器(控制阀),从而改变流量调节水位。当对象是单水箱时,通过不断调整PID 参数,单闭环控制系统理论上可以达到比较好的效果,系统也将有较好的抗干扰能力。该设计对象属于双水箱系统,整个对象控制通道相对较长,如果采用单闭环控制系统,当上水箱有干扰时,此干扰经过控制通路传递到下水箱,会有很大的延迟,进而使控制器响应滞后,影响控制效果,在实际生产中,如果干扰频繁出现,无论如何调整PID 参数,都将无法得到满意的效果。考虑到串级控制可以使某些主要干扰提前被发现,及早控制,在内环引入负反馈,检测上水箱液位,将液位信号送至副控制器,然后直接作用于控制阀,以此得到较好的控制效果。 设计中,首先进行单回路闭环系统的建模,系统框图如下: 可发现,在无干扰情况下,整定主控制器的PID 参数,整定好参数后,分别改变P 、I 、D 参数,观察各参数的变化对系统性能的影响;然后加入干扰(白噪声),比较有无干扰两
M a t l a b在自动控制中 的应用
MATLAB在控制理论中的应用 摘要:为解决控制理论计算复杂问题,引入了MATLAB。以经典控制理论和现代控制理论中遇到的一些问题为具体实例,通过对比的手法,说明了MATLAB在控制理论应用中能节省大量的计算工作量,提高解题效率。 引言:现代控制理论是自动化专业一门重要的专业基础课程,内容抽象,且计算量大,难以理解,不易掌握。采用MATLAB软件计算现代控制理论中的问题可以很好的解决这些问题。自动控制理论分为经典控制理论和现代控制理论,在控制理论学习中,经常要进行大量的计算。这些工作如果用传统方法完成,将显得效率不高,额误差较大。因此。引用一种借助于计算机的高级语言来代替传统方法就显得十分必要。MATLAB集科学计算,可视化,程序设计于一体,对问题的描述与求解较为方便,在控制理论的学习中是一种备受欢迎的软件。 MATLAB简介:MATLAB 是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。 MATLAB是矩阵实验室(Matrix Laboratory)的简称,和Mathematica、Maple 并称为三大数学软件。它在数学类科技应用软件中在数值计算方面首屈一指。MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。 1、MATLAB在系统的传递函数和状态空间模型之间的相互转换的应用:例1:求以下状态空间模型所表示系统的传递函数: 解:执行以下的M-文件:
双容水箱液位模糊控制 一、实验目的 熟悉双容液位控制系统的组成原理。 通过实验进一步掌握模糊控制原理及模糊控制规则的生成。了解量化因子和比例因子对控 制效果的影响。 掌握解模糊方法及实现。 二、实验设备 实验对双象为TKGK-1双容液位系统 TKGK-1 型实验装置:GK-06、GK-07-2 万用表一只 计算机系统 三、实验原理 图1双容水箱液位模糊控制系统方框图 图1为双容水箱液位控制系统。控制 的目的是使下水箱的液位等于给定值,并能克服来 自系统内部和外部扰动的影响。双容水箱液位系统 如图2,该被控对象具有非线性和时滞性,建立精确的 数学模型比较困难;模糊控制不 仅可以避开复杂的数学模型,通常还能得到比较好性 能指标。模糊控制器的结构图如图3。 模糊控制器的输入为误差和误差变化率:误差e=r- y,误差变化率ec=de/dt ,其
糊语言集合,然后由E和EC模糊语言的的子集和模糊控制规则R (模糊关系矩阵)根据合成推理规则进行模糊决策,这样就可以得到模糊控制向量U,最后再把模糊量解模糊转换为精确量u ,再经D/A转换为模拟量去控制 执行机构动作。 图3模糊控制器组成原理图 模糊量化:根据精确量实际变化范围[a,b],合理选择模糊变量的论域为[-n,n],通过量化因 子k=&-企,将其转换成若干等级的离散论域,如七个等级为{负大,负中,负小,零,正小,正中,正大},简写为{NB,NM,NS,O,PS,PM,PB}确定模糊子集的隶属函数曲线。一般常采用三角形、梯形和正态分布等几种曲线。然后由隶属函数曲线得出模糊变量E、EG U的赋值表。 根据经验,E模糊子集的隶数度函数取正态分布曲线,则赋值表见表 模糊控制规则:模糊控制规则是操作经验和专家知识的总结,是进行模糊推理的依据。在设 计模糊控制规则时,必须考虑控制规则的完备性、交叉性和一致性。既保证对于任意给定的 输入,均有相应的控制规则起作用;控制器的输出值总是由数条控制规则来决定;控制规则 中不存在相互矛盾的规则。在总结专家经验和过程知识的基础上,可以得到如表二的控制规 则表: 模糊推理:模糊推理是模糊控制器的核心,模糊控制系统目前常采用的有:CRI推理的查表法、CRI推理的解析法、Mamdani直接推理法、后件函数法等。本实验可采用Mamdani直接推理法。Mamdani推理法是先求出模糊关系R,再根据输入求出控制量,把 控制量清晰化,可得控制查询表.
《过程控制系统设计》课程实验报告 2018年5月9日
实验二双容水箱液位PID控制实验 一、实验目的 1、学习双容水箱液位PID 控制系统的组成和原理; 2、进一步熟悉PID 的调节规律; 3、进一步熟悉PID 控制器参数的整定方法。 二、实验设备 1、四水箱实验系统DDC 实验软件; 2、PC 机(Window XP 操作系统); 3、CS4000型过程控制实验装置。 三、实验原理 1、控制系统的组成及原理 单回路调节系统,一般是指用一个控制器来控制一个被控对象,其中控制器只接收一个测量信号,其输出也只控制一个执行机构。双容水箱液位PID 控制系统也是一种单回路调节系统,典型的双容水箱液位控制系统如图 1 所示: 图 1 双容水箱液位PID 控制系统的方框图 在双容水箱液位PID 控制系统中,以液位为被控量。其中,测量电路主要功能是测量对象的液位并对其进行归一化等处理;PID 控制器是整个控制系统的核心,它根据设定值和测量值的偏差信号来进行调节,从而控制双容水箱的液位达到期望的设定值。 3、PID 控制器参数的实验整定方法 双容水箱液位PID 控制器参数整定,是为了得到某种意义下的最佳过渡过程。我们这里选用较通用的“最佳”标准,即在阶跃扰动作用下,先满足需要的衰减率,然后尽量协调准确性和快速性要求。 四、实验内容 在手动情况下进入初始稳态(如图3),然后根据水箱的实际液位情况进行了一次下水箱阶跃响应测试,最终达到平衡状态,如图4所示。根据两点法求K、T、τ参数,并用响应曲线法整定出对应的控制器参数。将整定好的参数投入设备,进行闭环自动控制,并微调参数,记录分析控制系统的响应曲线。
MATLAB在控制系统中应用 部门: xxx 时间: xxx 制作人:xxx 整理范文,仅供参考,可下载自行修改
MATLAB在控制系统中的应用 [摘要]:MATLAB具有编程简单直观,开放性强等优点,能有效提高 控制系统的工作效率,是控制系统中一种很好的工具。MATLAB 除了 传统的交互式编程之外,还提供丰富可靠的矩阵运算、图形绘制、 数据处理、方便的Windows 编程等便利工具,出现了各种以MATLAB 为基础的实用工具箱, 广泛地应用于自动控制、图像信号处理、生 物医学工程、语音处理、雷达工程、信号分析、振动理论、时序分 析与建模、化学统计学、优化设计等领域。并显现出一般高级语言 难以比拟的优势。 关键词:MATLAB 应用软件;控制系统设计;离散系统设计;仿 真;应用 一、控制系统的主要内容 <1)线性控制系统的数学模型 目前大部分控制系统分析设计的算法都需要假设系统的模型已知,而获得数学模型有两种方法:其一是从已知的物理规律出发,用数学推导的方法建立起系统的数学模型,另外一种方法是由实验数据拟合系统的数学模型。一般线性系统控制理论科学和研究中,经常将控制系统分为连续系统和离散系统,描述线性连续系统常用的描述方式是传递函数和状态方程,相应地离散系统可以用离散传递函数和离散状态方程表示。除了这两种描述方法以外,还常用零极点形式来表示连续线性系统模型。b5E2RGbCAP <2)线性系统的传递函数模型
连续动态系统一般是由微分方程来描述的,而线性系统又是以线性常微分方程来描述的。当系统用传递函数表示如下所示时:p1EanqFDPw 在MATLAB 中可以分别表示完分子和分母多项式后,再利用控制系统工具箱的tf<)函数就可以用一个变量表示传递函数G :DXDiTa9E3d >>];,,...,,[121+=m m b b b b num ]; ,,,...,,[132,1+=n n a a a a a den );,(den num tf G = <3)线性系统的状态方程模型 当系统是用状态方程描述时,MATLAB 要用到另一种表示函数的方法,例如系统用状态方程的表示如下所示: )()()(t Bu t Ax t x += )()()(t D t Cx t y += 此系统的状态方程模型可以用下面的语句直接建立起来:),,,(D C B A ss G = <4)线性系统的零极点模型 零极点模型实际上是传递函数的另一种表现形式,对原系统传递函数的分子和分母分别进行分解因式处理,则可得到系统的零极点模型为RTCrpUDGiT ))...()(() )...()(()(2121n m p s p s p s z s z s z s K s G ------= 在MATLAB 下表示零极点模型的方法很简单,先用向量的形式输入系统的零点和极点,然后调用zpk<)函数就可以输入这个零极点模型了。5PCzVD7HxA ]; ;...;;[21m z z z z =>> ]; ;...;;[21n p p p p = 1 231211 121......)(+--+-+++++++++=n n n n n m m m m a s a s a s a s a b s b s b s b s G
matlab在机械控制中的应用 姓名:xxx 学号:2010232 专业:机械制造及其自动化 Matlab在机械工程操纵中的应用 摘要:MATLAB是由美国mathworks公司公布的要紧面对科学运算、可视化以及交互式程序设计的高科技运算环境。它将数值分析、矩阵运算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值运算的众多科学领域提供了一种全面的解决方案,并在专门大程度上摆
脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学运算软件的先进水平。 一、机械工程操纵简介 机械操纵工程是研究操纵论在机械工程中应用的科学。它是一门跨操纵论和机械工程的边缘学科。随着工业生产和科学技术的持续向前进展,机械工程操纵论这门新兴学科越来越为人们所重视。他不仅满足今天自动化技术高度进展的需要,同时也与信息科学和系统科学紧密有关,更重要的是它提供了辩证的系统分析方法,即不但从局部,而且从整体上认识和分析机械系统,改进和完善机械系统,以满足科技的进展和工业生产的实际需要。 机械工程操纵论的研究对象与任务 机械工程操纵论的研究对象是机械工程技术中广义系统的动力学咨询题。具体地讲,机械操纵路是研究系统及其输入、输出三者之间的动态关系,也确实是研究机械工程广义系统在一定的外界条件下,从系统的一定初始条件动身,所经历有内部的固有属性所决定的整个动态历程。就系统及其输入、输出三者之间动态关系而言,机械工程操纵论的任务要紧研究一下几方面的为题: (1)当系统已定,输入已知时,求出系统的输出(响应),并通过输出来研究系统本身的有关为题,称系统分析。 (2)当系统已定,系统的输出也已给定是,要确定系统的输出尽可能符合给定的最佳要求,称系统的最优操纵。 (3)当输入已知输出也一给定时,要确定系统,使其可能符合给定的最佳要求,称最优设计。 (4)当输入和输出均已知时,求系统的结构参数,即建立系统的数学模型,称系统的便是或系统识不。 (5)当系统已定输出已知时,要识不输出输出输入的有关信息,成滤波与推测。 1.2操纵系统的工作原理与组成
本科生毕业论文(设计) 双容水箱液位控制系统 院-系:工学院 专业:电气工程及其自动化 年级: 学生姓名: 学号: 导师及职称:
Department: Major:Electrical engineering and automation Grade: Student’s Name: Student No: Tutor:
\毕业论文(设计)原创性声明 本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。 作者签名:日期: 毕业论文(设计)授权使用说明 本论文(设计)作者完全了解红河学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。学校可以公布论文(设计)的全部或部分内容。保密的论文(设计)在解密后适用本规定。 作者签名:指导教师签名: 日期:日期:
毕业论文(设计)答辩委员会(答辩小组)成员名单 姓名职称单位备注 主席(组长)
【摘要】 随着现代工业生产过程向着大型、连续和强化方向发展,对控制系统的控制品质提出了日益增长的要求。在这种情况下,简单的单回路控制已经难以满足一些复杂的控制要求。串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。串级控制系统把两个单回路控制系统以一定的结构形式串联在一起,它不仅具有单回路控制系统的全部功能,而且还具有许多单回路控制系统所没有的优点。串级控制系统采用了两个调节器,因此它的调节器的参数整定更复杂一些。 本论文论述了一个液位——流量串级控制系统的设计方法和步骤,介绍了它的参数整定方法。在此过程中,介绍了对液位和流量进行检测和转换的常用元件,应用阶跃响应曲线推导了广义对象的传递函数,简单地论述了串级控制系统的优点,讨论了它对控制效果的改善作用,并使用仿真软件对该系统进行了仿真,最后用组态软件编制程序来实现控制。 关键词:串级控制系统,液位,流量,仿真
MATLAB在控制理论中的应用 摘要:为解决控制理论计算复杂问题,引入了MATLAB。以经典控制理论和现代控制理论中遇到的一些问题为具体实例,通过对比的手法,说明了MATLAB 在控制理论应用中能节省大量的计算工作量,提高解题效率。 引言:现代控制理论是自动化专业一门重要的专业基础课程,内容抽象,且计算量大,难以理解,不易掌握。采用MATLAB软件计算现代控制理论中的问题可以很好的解决这些问题。自动控制理论分为经典控制理论和现代控制理论,在控制理论学习中,经常要进行大量的计算。这些工作如果用传统方法完成,将显得效率不高,额误差较大。因此。引用一种借助于计算机的高级语言来代替传统方法就显得十分必要。MATLAB集科学计算,可视化,程序设计于一体,对问题的描述与求解较为方便,在控制理论的学习中是一种备受欢迎的软件。 MATLAB简介:MATLAB 是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。 MATLAB是矩阵实验室(Matrix Laboratory)的简称,和Mathematica、Maple并称为三大数学软件。它在数学类科技应用软件中在数值计算方面首屈一指。MATLAB 可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。 1、MATLAB在系统的传递函数和状态空间模型之间的相互转换的应用:例1:求以下状态空间模型所表示系统的传递函数: 解:执行以下的M-文件:
双容水箱液位流量串级控制系统设计 ◆设计题目 双容水箱液位流量串级控制系统设计 ◆设计任务 如图1所示的两个大容量水箱。要求水箱2水位稳定在一定高度,水流量经常波动,作为扰动量存在。试针对该双容水箱系统设计一个液位流量串级控制方案。 水箱1 水箱2 图1 系统示意图◆设计要求 1)已知主被控对象(水箱2水位)传递函数W1=1/(100s+1, 副被控对象(流量)传递函数W2=1/(10s+1。 2)假设液位传感器传递函数为Gm1=1/(0.1s+1,针对该水箱工作过程设计单回路PID 调节器,要求画出控制系统方框图及实施方案图,并给出PID 参数整定的方法与结果; 3)假设流量传感器传递函数为Gm2=1/(0.1s+1,针对该水箱工作过程设计液位/流量串级控制系统,要求画出控制系统方框图及实施方案图,并给出主、副控制器的结构、参数整定方法及结果; 4)在进口水管流量出现阶跃扰动的情况下,分别对单回路PID 控制与串级控制进行仿真试验结果比较,并说明原因。 ◆设计任务分析
一、系统建模 系统建模基本方法有机理法建模和测试法建模两种建模方法。 机理法建模就是根据生产过程中实际发生的变化机理,写出各种有关的平衡方程,从中获得所需的数学模型 测试法一般只用于建立输入—输出模型。它是根据工业过程的输入和输出的实测数据进行某种数学处理后得到的模型。它的特点是把研究的工业过程视为一个黑匣子,完全从外特性上测试和描述它的动态性质。 对于本设计而言,由于双容水箱的各个环节的数学模型已知,故采用机理法建模。 在该液位控制系统中,建模参数如下: 控制量:水流量Q ; 被控量:水箱2液位; 主被控对象(水箱2水位)传递函数W1=1/(100s+1, 副被控对象(流量)传递函数W2=1/(10s+1。 控制对象特性: Gm1(S )=1/(0.1S+1)(水箱1传递函数); Gm2(S )=1/(0.1S+1)(水箱2传递函数)。 控制器:PID ; 执行器:流量控制阀门;
双容水箱液位控制系统仿真
————————————————————————————————作者:————————————————————————————————日期:
内蒙古科技大学 控制系统仿真课程设计说明书 题目:双容 水箱 液位 控制 系统 仿真 学生姓名:任志江 学号:1067112104 专业:测控技术与仪器 班级:测控 10-1班 指导教师:梁丽
课程名称 控制系统仿真 设计题目 双容水箱液位控制系统仿真 指导教师 梁丽 时间 2012.10.29~2012.11.02 一、教学要求 1、学会收集和查阅资料,学会针对指定控制系统建立数学模型的方法; 2、学会使用Matlab/Simulink 建模和仿真的方法; 3、掌握控制器的设计方法,以及控制器参数整定和优化的方法。 二、设计资料及参数 1、双容水箱逻辑结构上图所示。 水流入量Qi 由调节阀u (FV101)控制,流出量Qo 则由用户通过负载阀R 来改变,被调量为下水箱水位h ,分析水位在调节阀开度扰动下的动态特性。 2、对某种型号的水箱,在某一平衡点附近,建立其线性化模型,其中各参数分别为:T1=80s ,T2=80s ,K1=KuR1=1,K2=R2/R1=1,s s 22,81==ττ 。 三、设计要求及成果 1、分析系统,根据物料平衡原理(即液位平衡状态下,流出量必然等于流入量)和给出的参数推导系统的数学模型; 2、将数学模型转变为仿真模型,并用Matlab/Simulink 实现求其动态响应; 3、设计合理的控制器(控制算法)控制下水箱液位,使其尽量满足稳、准、快的要求; 4、针对大滞后系统,可以用Simulink 搭建带有Smith 预估器的PID 控制器,将该模块嵌入到控制系统中直接控制。并与第三步设计的控制器的控制效果进行比较; 定值 Q i LT 104 记Q o h 双容水箱结构图 FV101
文章编号:1006-5342(2002)06-0050-03 MATLAB 在控制系统中的应用 徐武雄 (咸宁师范高等专科学校 物理系,湖北 咸宁 437005) 摘 要:MATLAB 作为一种计算机辅助设计工具日益受到人们的重视,文章以几个典型的实例来说明MATLAB 在控制系统中的应用 关键词:MATLAB;控制系统;计算机辅助设计中图分类号:TP273 文献标识码:A 0 引言 控制理论自20世纪40年代作为一门独立的学科出现以来,在工业、农业和国防等领域的应用已经越来越广泛 由于最初的控制系统大多比较简单,利用纸笔等工具就可以计算和设计出来 随着控制理论的迅速发展,控制效果要求越来越高,控制算法越来越复杂,控制器的设计也越来越困难,这样光利用纸笔以及计算器等简单运算工具难以达到预期效果,计算机技术的迅猛发展使人们很自然想到利用计算机来辅助设计控制系统[1] 目前,国际上在控制领域最流行的软件当属MAT -LAB 借助MATLAB 可以使复杂的控制系统设计变得简单、直观和可靠,减少了劳动强度,提高了工作效率 本文以几个典型的问题来说明MATLAB 在控制领域中的应用 1 MATLAB 简述 MATLAB 是一种面向科学和工程计算的高级语言,现已成为国际公认的最优秀的科技界应用软件,在世界范围内广为流行和使用 MATLAB 在许多学科领域中成为计算机辅助设计与分析、算法研 究和应用开发的基本工具和首选平台[2] 该软件 的特点可以归纳为以下几点[3] : (1)简单易用 MATLAB 是一门编程语言,其语法规则与一般的结构化高级编程语言(如C 语言)大同小异,而且不需定义变量和数组,使用更方便 (2)代码短小高效 由于MATLAB 已经将具体的算法编成了具体的函数,用户只需熟悉算法的特点、使用场合、函数的调用格式和参数意义等,通过调用函数很快解决问题 (3)计算功能非常强大 具有强大的矩阵计算功能,利用一般的符号和函数就可以对矩阵进行加、减、乘、除的运算以及转置和求逆运算 此外, 该软件现有的六十多个工具箱可以解决数学和工 程领域的绝大多数问题 (4)强大的图形表达功能 不仅可以绘制一维、二维和三维图形,还可以绘制工程特性较强的特殊图形 (5)可扩展性 用户可以自己编写M 文件,组成自己的工具箱 2 MATLAB 在控制系统中的应用 借助MATLAB 及其控制系统工具箱和SI MULINK 的强大功能,可以迅速解决大量的数字计算、特殊图形绘制、动态系统建模、系统仿真和分析 下面以几个典型问题来说明其在控制系统中的应用 2 1根轨迹的绘制 用手工绘制根轨迹是一件很麻烦的事,所绘图形是一个大致形状,而且不是很美观 利用MAT -LAB 绘制就可以克服这些缺点 下面用MATLAB 绘制根轨迹[2]: 已知传递函数:G H (s)=K (s +8)/[s (s +2)(s 2 +8s +32)],绘制根轨迹并求下面两种情形下的K 值:(i)两条分支进入右半平面(ii)两条分支从复数极点出发在实轴相交 解决以上问题很简单,只需几条语句即可完成,源程序如下: den=conv([120],[1832]) %分母有四个极点G=tf([18],den) %定义分子并创建G(s)Gzp=zpk(G) %显示G(s)的零点、极点和增益rlocus(G) %计算根轨迹 axis([-155-1010]) %调整绘制区域 [kk,clroots]=rlocfind(G) %计算增益值和极点 MATLAB 绘制的根轨迹如图1所示 画出了根轨迹后,我们可以交互的使用rlocfind 命令来确定用户点击鼠标所选的根轨迹上任意点所对应的 收稿日期:2002-07-23 第22卷第6期 咸 宁 师 专 学 报 Vol.22,No.62002年12月 Journal of X ianning Teachers C ollege Dec.2002