100t伸缩臂履带式起重机臂架结构设计和优化分析
- 格式:pdf
- 大小:260.93 KB
- 文档页数:4
钢筋混凝土伸臂梁设计中的经验总结与优化方案在钢筋混凝土伸臂梁设计中的经验总结与优化方案问题上,为了确保文章整洁美观,本文将按照以下格式进行撰写:一、引言钢筋混凝土伸臂梁作为一种常用的结构梁型,具有承载力强、施工方便等优势,被广泛应用于桥梁、高楼等工程中。
然而,在设计与施工过程中,也存在一些问题和挑战。
本文旨在总结钢筋混凝土伸臂梁设计中的经验,并提出相应的优化方案,以提高工程效果和质量。
二、设计经验总结1. 荷载分析钢筋混凝土伸臂梁的设计首先需要进行准确的荷载分析,包括常规荷载和临时荷载的考虑。
在分析荷载的过程中,应合理选择设计荷载值,并根据实际情况确定梁的重要参数,如截面尺寸、受力状态等。
2. 截面设计根据荷载分析的结果,钢筋混凝土伸臂梁的截面设计应合理选取,以满足强度和刚度的要求。
一般而言,考虑截面的矩形与T形截面两种类型,根据具体情况进行选择,并应确保截面的可施工性和经济性。
3. 纵向受力设计钢筋混凝土伸臂梁在受到荷载作用时,除了考虑截面设计外,还需要进行纵向受力设计。
这包括合理布置纵向受力筋、设置预应力或悬挂荷载等。
在进行纵向受力设计时,应注意控制裂缝的发展,以确保结构的安全性和耐久性。
4. 抗剪设计钢筋混凝土伸臂梁的抗剪设计是设计过程中的重要环节。
通常采用剪力折减法进行设计,在确定剪力荷载的基础上,计算剪力折减系数,并选取合适的抗剪筋。
5. 配筋设计在完成上述设计之后,钢筋混凝土伸臂梁的最后一步是配筋设计。
根据截面设计和受力分析的结果,选取适当的梁筋和箍筋,并按照规范要求布置。
三、设计优化方案1. 结构形式优化钢筋混凝土伸臂梁的结构形式有多种选择,如悬臂式、支座式等。
在实际设计中,应根据工程要求和施工条件,选择最为适合的结构形式,以提高整体刚度和承载能力。
2. 采用新材料随着科技的进步,新型材料的应用也为钢筋混凝土伸臂梁设计带来了新的思路。
例如,高性能混凝土、纤维增强材料等的引入可以增加梁的强度和延性,并减小结构的自重,实现优化设计。
机械结构的优化设计与强度分析机械工程是一门应用科学,涉及设计、制造和维护各种机械设备和系统的学科。
在机械工程中,机械结构的优化设计和强度分析是非常重要的领域。
本文将探讨机械结构优化设计和强度分析的相关概念、方法和应用。
一、机械结构的优化设计机械结构的优化设计旨在通过改进结构的形状、尺寸和材料,以实现性能和效率的最大化。
在优化设计中,需要考虑多个因素,如结构的强度、刚度、稳定性、质量、成本和可靠性等。
为了实现优化设计,工程师通常使用计算机辅助设计(CAD)软件和有限元分析(FEA)方法。
在机械结构的优化设计中,一种常用的方法是拓扑优化。
拓扑优化是通过改变结构的拓扑形状,以减少结构的质量和应力集中区域。
拓扑优化可以通过迭代过程来实现,通过在每一步中去除不必要的材料,从而逐渐优化结构的形状。
这种方法可以显著提高结构的性能和效率。
另一种常用的优化设计方法是参数化设计。
参数化设计是通过改变结构的尺寸和形状参数,以实现性能的最优化。
参数化设计可以通过设计变量的选择和优化算法的应用来实现。
通过这种方法,工程师可以在满足一定约束条件的前提下,找到最佳的结构设计。
二、机械结构的强度分析机械结构的强度分析是为了评估结构在工作条件下的强度和刚度。
在强度分析中,需要考虑结构的受力情况、材料的力学性能和结构的几何形状等因素。
强度分析可以通过解析方法和数值方法来实现。
在强度分析中,一种常用的数值方法是有限元分析(FEA)。
有限元分析是一种基于数值计算的方法,通过将结构分割成许多小的有限元单元,然后求解每个单元的力学方程,最终得到整个结构的应力和位移分布。
有限元分析可以用于评估结构的强度、刚度、稳定性和疲劳寿命等。
除了有限元分析,还有其他的强度分析方法,如解析法、试验法和计算机模拟等。
这些方法可以根据具体情况选择和应用,以评估结构的强度和性能。
结论机械结构的优化设计和强度分析是机械工程中的重要领域。
通过优化设计,可以改进结构的形状、尺寸和材料,从而实现性能和效率的最大化。
避免起重机吊臂伸缩时抖动的结构设计要点发布时间:2023-01-28T06:52:48.196Z 来源:《中国建设信息化》2022年第18期作者:赵星星[导读] 起重机伸缩式吊臂在伸缩过程中易出现抖动,尤其是在起重机伸缩时吊臂完全伸缩或上升至最大高度后赵星星身份证号:32108419870926****,江苏扬州 225600摘要:起重机伸缩式吊臂在伸缩过程中易出现抖动,尤其是在起重机伸缩时吊臂完全伸缩或上升至最大高度后,进行缩臂或下摆操作时,会出现较大的抖动,从而导致被吊货物不稳定,操作困难,存在安全隐患。
因此本文将对避免起重机吊臂伸缩时抖动的结构设计要点进行探究。
关键词:起重机吊臂;伸缩;抖动;结构设计1 引言起重机伸缩臂在使用伸缩缸和钢索的情况下,经常会发生一定的抖动,甚至会产生异常的声音。
当抖动、异常响声较大时,调试人员普遍认为与水力系统有关系,所以在分析和处理起重机伸缩式吊臂抖动问题时,需要先检查油缸中是否有空气、平衡阀是否工作正常等。
实际上,由于吊臂架的结构不合理,在伸缩过程中也会出现抖动和异常声响。
因此,以下将对避免起重机吊臂伸缩时抖动的结构设计要点进行探究。
2 起重机吊臂伸缩时抖动原因起重机伸缩式吊臂的回缩会由于牵扯到起重机伸缩式吊臂和液压件,其原因分析比较复杂,难以处理;(1)将吊臂机本身的加工错误所引起的抖动因素考虑在内;(2)尼龙滑块由于较高的摩擦系数而引起的抖动;如果吊臂在伸缩过程中的摩擦力太大,会导致系统的压力变化,由此使其在液压冲击情况下导致吊臂出现抖动问题。
如果吊臂的滑块磨损较大,那么吊臂在伸出的过程中会发生倾斜,并且很容易发生抖动;缩臂时,也增加了吊臂的阻力,使其抖动更加剧烈。
(3)应注意是否有足够的润滑;(4)考虑油缸会不会发生抖动;(5)检查平衡阀门的故障情况;(6)吊臂伸缩钢丝绳松动。
吊臂伸缩式钢索的松动会导致起重机的振动。
判别方法:拆卸伸缩钢索,仅靠伸缩缸来驱动伸缩臂,观察吊臂伸缩是否自由,是否有抖动。
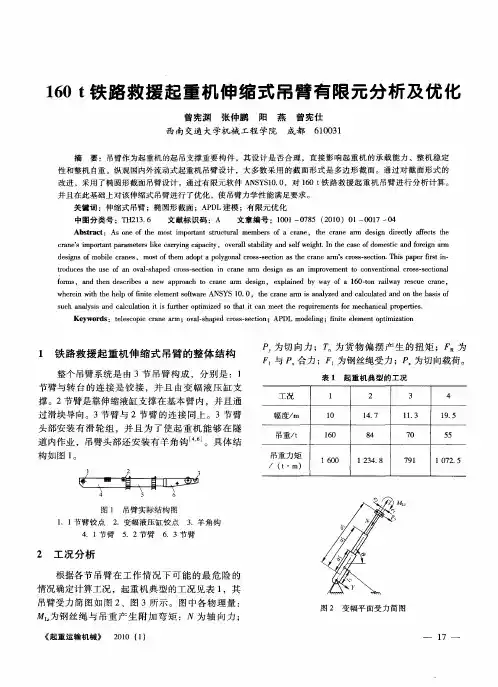
摘要履带起重机是工程起重机行业的一个重要门类,是现代工程建设施工中不可缺少的大型设备之一。
臂架作为履带起重机的主要承载结构件,尤其是在大吨位履带起重机中,其设计和制造质量直接关系着起重机的整机安全性。
长臂架刚度小,起臂工况下,二次变形易引起结构失稳而导致起臂失败,造成臂架损坏的严重后果,因此合理的对臂架结构进行设计是成功的对履带式起重机设计的关键。
履带起重机是用于起重作业的流动式起重机,可用于物料起重运输、设备及厂房安装等作业。
履带起重机由于接地比压小,转弯半径小,爬坡能力大,能适应恶劣地面,具有起重能力大、臂长组合多、起重性能好、作业幅度大、吊重作业不需要打支腿、可吊载行驶等特点,使它具有其它类型起重机所无法比拟的优势。
但由于其作用工况复杂,更需要合理的设计及仿真。
本课题主要对80t履带起重机臂架进行合理的设计计算,并按照设计所得的尺寸对臂架建模,利用ansys软件对模型进行有限元分析,模态分析等。
关键词:履带式起重机,臂架系统,静态分析,模态分析ABSTRACTCrawler crane is one of the necessary equipments and weightily type in project construction at hoist industry. As main bearing weight structure of the crawler crane, the design and manufacture quality for boom system are important to the safety of the whole machine, especially for the great tonnage cranes. The failure of the boom raised and damage to the boom result from the little rigidity of the long boom. The auxiliary bracing is a vital factor in the boom system. The deflection and the bearing weight condition can be improved obviously.Crawler crane is a mobile crane for lifting operation, lifting can be used to transport materials, equipment and installation of plant and other operations. Crawler crane has low grounding pressure, small turning radius and large climbing ability. It also can adapt to poor ground. Crawler crane has a large lifting capacity, kinds of combination for the length of the arm and large operating range.It also performs well in lifting. Just because of all this characters it has,crawler crane has the incomparable advantages which other types of cranes do not have.However, because it always works in the complicated situation, the reasonable design and simulation is necessary.This essay mainly talks about how to make a rational design for the boom of 80t crawlar crane and to creat the model of the boom with the designing size,then using ansys software to make finite element analysis and modal analysis for the model of the boom.Key words:Crawler Crane; Boom System;Static Analysis;Modal Analysis目录中文摘要 (Ⅰ)ABSTRACT (Ⅱ)1绪论 (1)1.1 履带式起重机发展概述 (1)1.1.1国外履带式起重机发展现状 (1)1.1.2国内履带式起重机发展现状 (3)1.1.3履带式起重机发展趋势 (4)1.2起重机现代设计方法概述 (5)1.3课题的提出与意义 (8)1.3.1课题的提出 (8)1.3.2课题的意义 (8)2 履带式起重机及其臂架系统 (10)2.1履带式起重机简介 (10)2.2履带式起重机臂架组合方式与工作原理 (12)2.3起重机计算工况 (13)2.4臂架有限元分析 (14)2.4.1结构简化 (14)2.4.2有限元离散 (14)2.4.3载荷处理 (15)2.5本章小结 (17)3 有限元法及ANSYS分析系统 (18)3.1 有限元法 (18)3.1.1有限元法的基本思想 (18)3.1.2有限元法的基本要素 (18)3.1.3有限元法的典型分析步骤 (18)3.1.4有限元法的特点 (19)3.2 ANSYS有限元分析软件 (19)3.2.1 ANSYS分析软件 (19)3.2.2 ANSYS的主要功能 (20)3.2.3 ANSYS的主要技术特点 (20)3.2.4有限元分析流程 (21)3.3本章小结 (23)4 80t履带式起重机臂架的设计计算 (24)4.1选择臂架材料 (24)4.1.1垂直载荷Q (24)4.1.2起升绳拉力S (26)4.1.3图解法求轴向力P (27)4.1.4校核臂架截面积 (27)4.2臂架截面积的计算 (29)4.2.1臂架的计算长度l cx与l cy的计算 (29)4.2.2臂架的回转半径 (31)4.2.3臂架的截面尺寸计算 (33)4.3校核构件长细比λh (33)4.4本章小结 (34)5臂架模型的建立及有限元结构分析 (35)5.1模型的建立 (35)5.1.1确定建模方法 (35)5.1.2建立模型 (37)5.2选择单元类型 (39)5.3网格划分 (41)5.4约束及载荷处理 (42)5.5求解及计算结果分析 (46)5.6本章小结 (48)6模态分析 (49)6.1模态分析介绍 (49)6.2有限元模态分析的基础 (50)6.3模态分析的步骤 (50)6.4臂架模态分析 (52)6.5臂架模态计算结果分析 (56)6.6本章小结 (56)7结论与展望 (57)致谢 (58)参考文献 (59)1 绪论1.1履带起重机发展概述履带起重机以其起重量大、作业空间大、带载行走、接地比压小并可借助附加装置实现一机多用等独特的优势逐渐从众多起重机中脱颖而出,成为工程建设中的佼佼者。

双变幅桅杆起重机设计分析与优化一、双变幅桅杆起重机的工作原理双变幅桅杆起重机是一种通过在斜拉杆上设置滚动轭和伸缩式的吊装系统,来实现高效起重作业的起重机。
它的工作原理主要是通过伸缩式吊装系统的伸缩机构,使得起重臂在工作时可以根据工况要求伸缩变幅,并且在整个变幅范围内都能保持较好的平衡性和稳定性。
通过斜拉杆的设置,可以提供起重机的稳定性和安全性。
二、双变幅桅杆起重机的设计分析1. 结构设计分析双变幅桅杆起重机主要由主梁、斜杆、伸缩臂、滚轭、主卷扬机等部分组成。
主梁和斜杆是起重机主体的支撑结构,伸缩臂和滚轭则是起重机变幅和吊装工作的关键部件。
在设计过程中,需要充分考虑这些部件的结构强度、稳定性、安全性等方面的要求,以确保起重机在工作时能够稳定、安全地完成各种起重作业。
2. 传动系统设计分析双变幅桅杆起重机的伸缩臂和滚轭的伸缩机构是通过传动系统来实现的。
传动系统的设计需要考虑到起重机的变幅要求和控制要求,选择合适的传动方式和传动结构,以确保伸缩臂和滚轭能够在工作时实现快速、稳定的伸缩变幅,并且能够满足起重作业的要求。
3. 控制系统设计分析双变幅桅杆起重机的控制系统是起重机操作和变幅控制的关键部分。
控制系统设计需要充分考虑起重机的工作环境和工作要求,选择合适的控制方式和控制元件,以实现起重机的精确操作和变幅控制,确保起重作业的安全性和高效性。
三、双变幅桅杆起重机的优化方案1. 结构优化方案通过采用轻量化材料和优化结构设计,减小起重机自重,提高机械强度和稳定性,从而提高起重机的工作效率和使用寿命。
2. 传动系统优化方案采用先进的传动方式和传动结构,提高传动系统的传动效率和可靠性,减小传动系统的能量损耗,实现起重机的快速、稳定的变幅操作。
3. 控制系统优化方案采用先进的控制方式和控制元件,实现起重机的精确控制和智能化操作,提高起重机的工作精度和安全性,减小人为误操作对起重机的影响。
四、结语通过对双变幅桅杆起重机的设计分析和优化方案的研究,可以进一步提高起重机的性能和效率,满足不同工程项目的起重要求,为工程建设提供更好的技术支持和服务保障。
100t全回转拱上吊机走行机构优化设计蔡正茂(中交二航局第四工程有限公司,安徽芜湖 241007)[摘要]根据大型全回转拱上吊机爬拱时走行机构存在轮压大、前后轮受力不均的问题,结合常泰大桥100t全回转拱上吊机整机性能参数和要求,在对走行机构进行受力分析及有限元计算的基础上,对其结构进行优化设计,提出了一种走行机构主结构非对称设计方式,均衡了爬拱过程中走行前后走行轮受力,增强拱上吊机牵引走行的稳定性,对拱上吊机走行机构的设计提供了有益参考。
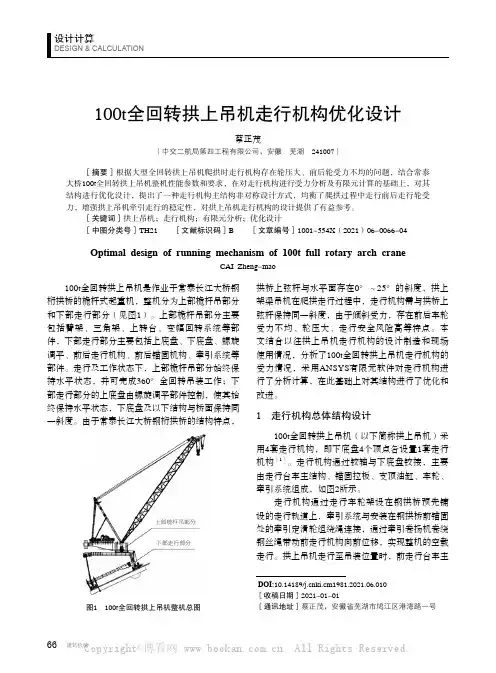
[关键词]拱上吊机;走行机构;有限元分析;优化设计[中图分类号]TH21 [文献标识码]B [文章编号]1001-554X(2021)06-0066-04Optimal design of running mechanism of 100t full rotary arch craneCAI Zheng-mao100t全回转拱上吊机是作业于常泰长江大桥钢桁拱桥的桅杆式起重机,整机分为上部桅杆吊部分和下部走行部分(见图1)。
上部桅杆吊部分主要包括臂架、三角架、上转台、变幅回转系统等部件,下部走行部分主要包括上底盘、下底盘、螺旋调平、前后走行机构、前后锚固机构、牵引系统等部件。
走行及工作状态下,上部桅杆吊部分始终保持水平状态,并可完成360°全回转吊装工作;下部走行部分的上底盘由螺旋调平部件控制,使其始终保持水平状态,下底盘及以下结构与桥面保持同一斜度。
由于常泰长江大桥钢桁拱桥的结构特点,上部桅杆吊部分下部走行部分图1 100t全回转拱上吊机整机总图拱桥上弦杆与水平面存在0°~25°的斜度,拱上架梁吊机在爬拱走行过程中,走行机构需与拱桥上弦杆保持同一斜度,由于倾斜受力,存在前后车轮受力不均、轮压大、走行安全风险高等特点。
本文结合以往拱上吊机走行机构的设计制造和现场使用情况,分析了100t全回转拱上吊机走行机构的受力情况,采用ANSYS有限元软件对走行机构进行了分析计算,在此基础上对其结构进行了优化和改进。
高空作业车结构强度分析与优化设计高空作业车是一种用于建筑施工、设备维护以及其他特殊场景下的作业车辆。
其重要性在于能够提供安全稳定的工作环境,确保作业人员的安全。
本文将对高空作业车的结构强度进行分析,并提出相应的优化设计方案。
首先,我们需要了解高空作业车的基本结构。
一般而言,高空作业车包括底盘、云梯系统、工作平台和电气控制系统等组成部分。
底盘是整个车辆的基础,承载着全部重量。
云梯系统是用于控制车辆的升降和伸缩功能,它包括升降臂、曲臂和伸缩臂等部件。
工作平台是作业人员进行工作的区域,必须具备足够的强度和稳定性。
接下来,我们将对高空作业车的结构强度进行分析。
首先是底盘的结构强度。
底盘承载着整个车辆的重量,必须能够承受各种工作条件下的冲击力和扭矩。
在设计时,需要考虑底盘的材料选择和梁柱结构的合理设计,以确保其强度和刚度。
其次是云梯系统的结构强度。
云梯系统是高空作业车升降和伸缩功能的核心,其结构必须能够承受高强度的拉力和压力。
在设计时,需要采用足够强度和刚度的材料,并进行适当的结构设计,以确保云梯系统的安全可靠性。
最后是工作平台的结构强度。
工作平台是作业人员进行工作的区域,必须具备足够的强度和稳定性,以防止发生翻倒或折断等意外情况。
在设计时,需要考虑工作平台的材料选择、梁柱结构的设计和支撑点的布置等因素,以提高其结构强度。
针对以上结构强度分析,我们可以提出相应的优化设计方案。
首先,选择高强度和刚度的材料,如高强度钢材,以提高整个车辆的结构强度。
其次,采用合理的结构设计,如增加梁柱的数量和加固关键连接点,以增加各个部件的强度和稳定性。
此外,使用适当的支撑点布置,可以有效分散工作平台的载荷,减少局部应力集中的发生。
除了结构强度的优化设计,我们还需考虑高空作业车的使用安全。
例如,安装相应的安全保护装置,如防抱死制动系统和倾斜传感器等,以提高车辆在坡度和不平路面的稳定性。
此外,定期进行维护和检查,以确保车辆各个部件的可靠性和功能完整性。
用动态规划法进行起重机桁架式臂架的结构优化设计发表时间:2020-12-21T08:48:50.635Z 来源:《中国电业》(发电)》2020年第19期作者:赵庆利褚福领李忠焕[导读] 起重机金属结构的动力特性是指影响起重机金属结构动力响应的振动系统的固有频率、固有振型和阻力。
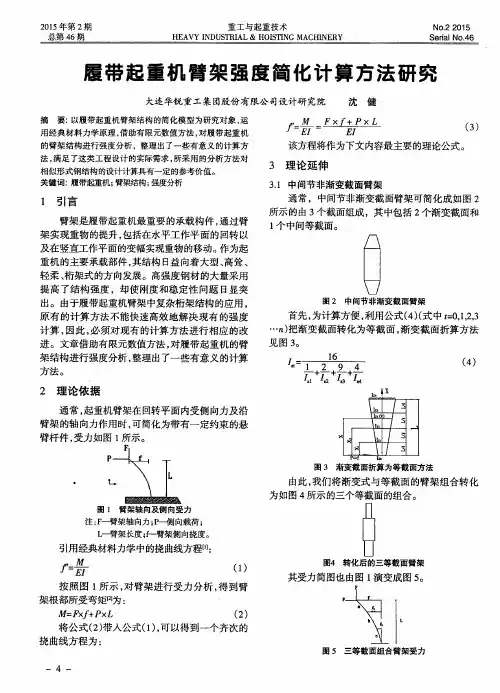
徐州重型机械有限公司 221004摘要:起重机的桁架式臂架通常是由节点间组成的串联结构,具有良好的相位性和相似性。
作为桁架结构,一般方法在结构优化设计中遇到的最大问题是变量过多,整个结构由上千个节点组成,每个节点还包括一千个独立参数(面积和长度)的杆件(当然杆件的长度和面积必须满足一定的整体协调条件)。
太多的变量使得优化极其低效,甚至是不可能的。
过多的可变约简的代价是,可变约简也可能减少可行域,从而得不到良好的结果。
关键词:动态规划法起重机桁架式臂架一.起重机的发展概述起重机金属结构的动力特性是指影响起重机金属结构动力响应的振动系统的固有频率、固有振型和阻力。
研究起重机金属结构的动态特性的重要意义在于,由于机构的启动和制动,起重机金属结构具有长时间的衰减振动,这将对驾驶员的生理机能和心理感受产生不良影响,不仅会影响装卸作业的定位精度,降低劳动生产率,而且每台起重机的金属结构都有自己的固有振动频率,在设计时为了避免外部激振力的频率,可以避免共振,有效地降低振动幅值。
结构的每个固有振动频率对应一个固有振动模态,可以准确计算结构的固有振动模态,使我们能够区分在什么样的激励力作用下会产生什么样的振动,从而控制相应激励力的频率,避免模态共振。
此外,动力特性计算是动力响应计算和其他动力分析的基础。
不进行动力特性计算,就无法进行其它动力计算。
壁挂式臂架起重机运行合理、安全。
适用于机械加工车间、装配车间、铸造车间、热处理车间。
运输,装卸,备件翻盖作业。
配有遥控装置,工人可远距离操作,是一种安全、理想的现代装配工具材料和设备,移动式壁式臂架起重机可以横向搬运货物,不占用地面空间,也不会干扰大型桥式起重机。
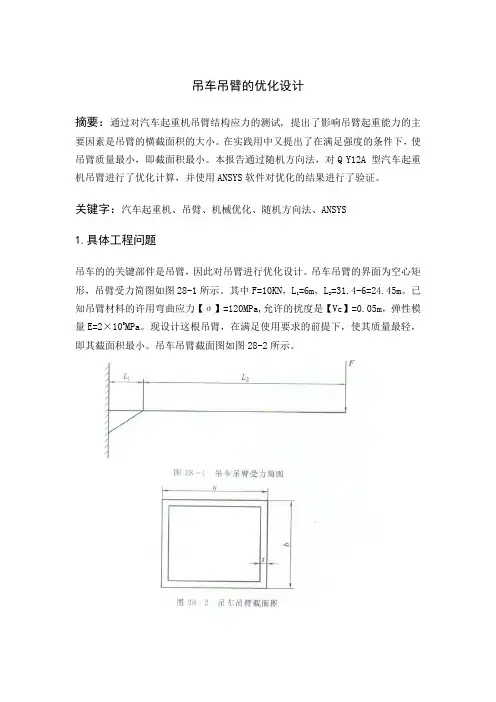
毕业设计(论文)题目汽车起重机伸缩臂系统设计目录前言 (1)摘要 (2)1 绪论 (2)1.1国内外汽车起重机发展概况及趋势 (2)1.2伸缩臂结构发展现状 (4)1.3伸缩臂机构形式介绍 (6)1.4本课题内容及重要意义 (7)2 QAY50汽车起重机主要技术参数和工作级别 (7)2.1QAY50起重机主要技术参数 (7)2.2QAY50汽车起重机的工作级别 (9)3伸缩臂传动方案和臂架截面的确定 (12)3.1伸缩臂传动方案的确定 (12)3.2伸缩臂架截面的确定 (14)4伸缩臂设计计算 (17)4.1起重机伸缩臂尺寸的确定 (17)4.2臂架伸缩液压缸的计算及选择 (22)4.3伸缩臂受力计算 (25)5伸缩臂有限元分析 (31)5.1伸缩吊臂有限元模型建立 (32)5.2计算结果与分析 (34)总结 (37)致谢 (38)参考文献 (39)汽车起重机伸缩臂系统设计摘要:臂架是起重机的主要承载构件。
起重机通过臂架直接吊载,实现大的作业高度与幅度。
臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。
所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。
本文主要根据QAY50吨汽车起重机工作要求来确定伸缩机构的结构和传动方案,进而采用传统的设计方法对主臂的三铰点、主臂的长度、及每节臂的长度、臂架的结构、液压缸尺寸进行确定,对臂架进行受力分析,利用有限元对臂架进行分析。
关键词:伸缩臂;液压缸;臂架结构,有限元分析Design of truck crane Telescopic boom systemAbstract:Boom is the main host of crane components. Directly through the jib crane hanging load, to achieve great height and range operations. Arm strength determines the maximum time from the weight lifting machine performance, its weight directly affect the machine overturning stability, structural design and therefore merits of boom, will directly affect the overall performance, such as the weight of the whole machine center of gravity height and machine stability. Thus, to ensure safe working conditions of boom to minimize the weight of boom, which improves overall quality and economy of great practical significance. Mainly based on XCMG truck crane 50 tons of requests to determine the structure and transmission expansion program, and then using the traditional design method is the main arm of the three nodes, the main arm length, arm length, and each section, Boom structure, determine the size of hydraulic cylinders.Keywords:Telescopic boom; hydraulic cylinder; Structure of boom ;ansys前言近年来,随着社会的发展,社会生活中对起重机的需求越来越大,但是,与国外汽车起重机相比,国外汽车起重机技术得到了飞速发展,所以国内起重机的研发越来越紧迫。
动臂塔式起重机整体结构优化设计的研究摘要:在当前动臂塔式起重机的运用过程中,首先我们要知道,起重机的具体的结构以及优化设计的方法,所以本文主要针对动臂塔式起重机的整体结构进行探讨,明确了其结构的一些具体的方式,以及在结构优化设计过程中可以采取的方法。
关键词:动臂塔式起重机,整体结构,优化设计前言在使用动臂塔式起重机的过程中,必须要更加明确它的结构,以及针对这些结构,我们要发现它的具体的问题以及可以优化的地方,并且采取更好的设计措施,进一步优化它的整个系统,提高其使用的效果。
1塔式起重机概述塔机工作时由于受到起升、回转、变幅各机构过程中造成的频繁启动、制动和耦合运动的影响,会使得结构不断受到强烈的冲击与震动,形成持续时期较长的衰减震动。
部分情况下,如果震动严重,除了会降低塔机的工作效率,阻碍司机的正常操作外,还会对于主要结构件带来疲劳破坏。
当前,随着高强度钢材的广泛应用,结构的强度和稳定性已经得到了保证,然而结构的静、动刚度问题则愈加明显,对其动态性能进行优化设计已经成为当前亟待解决的问题。
塔式起重机金属结构部分由:塔身,塔头或塔帽,起重臂架,平衡臂架,回转支撑架等主要部件组成。
对于特殊的塔式起重机,由于构造上的差异个别部件也会有所增减。
金属结构是塔式起重机的骨架,它承受着起重机自重以及作业时的各种外载荷,是塔式起重机的主要组成部分,其重量通常占整机重量的一半以上。
2动臂式起重机总体方案优化设计2.1变幅系统铰点位置的设计对于动臂起重机,由臂架下铰点和人字架上铰点所组成的变幅机构铰点是整机设计所需考虑的一个重要问题,也是起重机吊臂设计的基础。
通常铰点布置是通过作图和计算相结合的原则确定,其过程十分繁琐,还往往得不到最合理的布局,采用优化设计变幅机构的铰点位置时,可以确定的目标原则为:①变幅力最小②回转支承受力最小③臂架受力最小④在满足工作半径情况下,臂架长度最短。
显然,这是一个多目标优化问题,必须采用多目标优化方法求解才能得到真正的最优解。
基于Ansys Workbench的平头塔式起重机臂架结构优化分析黄江涛 高崇仁 王国涛 田星宇 周芳宇太原科技大学 太原 030024摘要:由于臂架是平头塔式起重机质量占比较大的结构,对整机的性能影响至关重要,故对臂架结构进行优化设计可大大提高整机的工作性能。
为此,文中采用许用应力法完成对平头塔式起重机臂架结构的初步设计计算,并对整机工作环境进行分析,了解起重臂架的工况,并使用Ansys Workbench软件对臂架进行静力学分析,以通过求解得到的应力云图和形变云图验证臂架结构设计计算的强度和刚度。
另外,对起重臂架进行模态分析,获取结构自身前六阶的固有频率和振型,为结的故障诊断和预警提供了可靠的理论依据。
在保证结构强度和刚度的前提下,通过对起重臂架各弦杆截面进行优化,从而降低臂架自重,提升材料的利用率,为起重臂架的轻量化设计提供参考思路。
关键词:平头塔式起重机;臂架结构;有限元;优化分析;模型中图分类号:TH.213.3 文献标识码:A 文章编号:1001-0785(2023)16-0037-06Abstract: Boom occupies a large proportion in the mass of flat-top tower crane, which has a great influence on the performance of the whole machine. Therefore, the optimization design of boom structure can greatly improve the performance of the whole machine. Therefore, the authors completed the preliminary design and calculation of the boom structure of the flat-top tower crane by using the allowable stress method, and analyzed the working environment in order to understand the working conditions of the boom. The static analysis of the boom was carried out by Ansys Workbench software, and the strength and stiffness in the design and calculation of the boom structure were verified by the stress nephogram and deformation nephogram obtained by solving. In addition, the modal analysis of the boom was carried out in order to obtain the first six natural frequencies and vibration modes, which provides a reliable theoretical basis for fault diagnosis and early warning. Under the condition of ensuring the structural strength and stiffness, the cross section of each chord of the boom is optimized, so as to reduce the self-weight of the boom and improve the utilization rate of materials, which provides a reference for the lightweight design of the boom.Keywords:flat-top tower crane;boom structure;finite element method;optimization analysis;model0 引言近年来,随着国家绿色发展政策的推进和回收体系的完善,作为占比20%的再生资源废纸的回收量持续增长,使纸品公司对存储环境的空间利用率提出了更高要求。