齿轮接触有限元分析_杨生华
- 格式:pdf
- 大小:228.59 KB
- 文档页数:6
采用ABAQUS进行齿轮接触应力分析采用ABAQUS进行齿轮接触应力分析 1 接触理论介绍及其在航空领域中的应用接触问题是土木、建筑、水利工程、石油化工、机械工程等领域中普遍存在的力学问题。
不管在接触边界之间是否有间隙存在,接触作用的出现对结构受载之后的接触状态和应力分布都有直接的影响,一方面通过接触可以提高整个结构的承载力和刚度或者可以起到减震作用;而另一方面也正是因为由于接触的存在,伴随着局部高应力,很容易使材料屈服或发生裂缝,如果再受到循环载荷的影响,还可能产生疲劳失效。
所以了解结构的接触状态和应力状态,对结构设计、施工及其补强措施,都有重要的意义。
两个物体在接触面上的相互作用是复杂的高度非线性力学现象,也是发生损伤失效和破坏的主要原因。
接触问题存在两个较大的难点:其一,在用户求解问题之前,不知道接触区域;其二,大多数的接触问题需要计算摩擦,可供挑选的几种摩擦定律和模型都是非线性的,使问题的收敛变得困难。
在飞机结构中,缝翼的运动是通过相互啮合的齿轮的旋转带动的,发动机带动齿轮的旋转是缝翼机构运动的动力来源。
齿轮是机械中广泛应用的传动零件之一,它具有功率范围大,传动效率高、传动比准确、使用寿命长等特点。
但从零件的失效情况来看,齿轮也是最容易出现故障的零件之一。
据统计,在各种机械故障中,齿轮失效就占总数的60%以上,其中齿面损坏又是齿轮失效的主要原因之一。
传动齿轮复杂的应力分布情况和变形机理又是造成齿轮设计困难的主要原因。
为此,人们对齿面接触及其应力分布进行了大量的研究。
有限元理论和各种有限元分析软件的出现,让普通设计人员无需对齿轮受力作大量的计算和研究就可以基本掌握齿轮的受力和变形情况,并可利用有限元软件进行结果分析,找出设计中的薄弱环节,进而达到对齿轮进行改进设计的目的。
2 采用ABAQUS进行齿轮接触分析的合理性齿轮结构对缝翼的运动起着决定性的作用,如果齿轮的接触不能满足强度要求,缝翼机构的运动将会受到严重影响。
单级圆柱齿轮减速器强度有限元分析齿轮减速器是一种常见的传动装置,广泛应用于机械设备中。
其中,单级圆柱齿轮减速器是一种常见的类型,具有结构简单、传动效率高等特点。
然而,在实际工作环境中,齿轮受到的载荷和力矩会对其强度产生影响。
为了确保齿轮减速器的正常运行,有限元分析被广泛应用于其强度计算。
本文将介绍单级圆柱齿轮减速器的强度有限元分析方法及其应用。
一、单级圆柱齿轮减速器的结构和工作原理单级圆柱齿轮减速器由输入轴、输出轴和一对齿轮组成。
输入轴和输出轴通过齿轮的啮合传递转矩和速度。
齿轮通常由钢材制成,根据轮齿的形状,可以分为直齿轮、斜齿轮和曲线齿轮等不同类型。
其中,圆柱齿轮由直齿轮组成,具有结构简单、加工容易等特点。
单级圆柱齿轮减速器的工作原理如下:当输入轴带动第一对齿轮旋转时,第二对齿轮也会随之转动,通过啮合传递转矩和速度。
减速比取决于齿轮的齿数,而转矩传递的平稳性则取决于齿轮的强度。
二、有限元分析在圆柱齿轮减速器强度计算中的应用有限元分析是一种计算机仿真方法,通过将结构离散为有限数量的单元,来模拟和计算结构的力学行为。
在圆柱齿轮减速器的强度计算中,有限元分析可以用来预测齿轮在工作过程中的受力情况、变形情况和疲劳寿命等。
首先,需要将圆柱齿轮的几何形状建模,并进行网格划分。
根据齿轮的具体几何参数,可以使用CAD软件绘制出齿轮的三维模型,然后通过网格生成工具将齿轮离散为有限数量的单元。
接下来,需要确定齿轮受力边界条件,如输入轴的转矩大小和方向等。
这些边界条件将被应用于仿真模型中,用于计算齿轮在工作过程中的应力分布。
然后,通过有限元软件进行力学分析,求解齿轮结构在各个节点上的应力和变形。
有限元软件可以根据所设定的边界条件和材料力学性质,通过有限元法将结构的力学行为进行数值模拟,得到齿轮的应力分布图像和变形分布图像。
最后,根据有限元分析结果,可以评估齿轮的强度状况。
通常,齿轮的强度由其表面接触应力和弯曲应力来决定。
《装备制造技术》2007年第12期设计与计算!!!!"!"!!!!"!"收稿日期:2007-10-07作者简介:王宝昆(1982—),男,在读硕士研究生,研究方向:机械设计及理论。
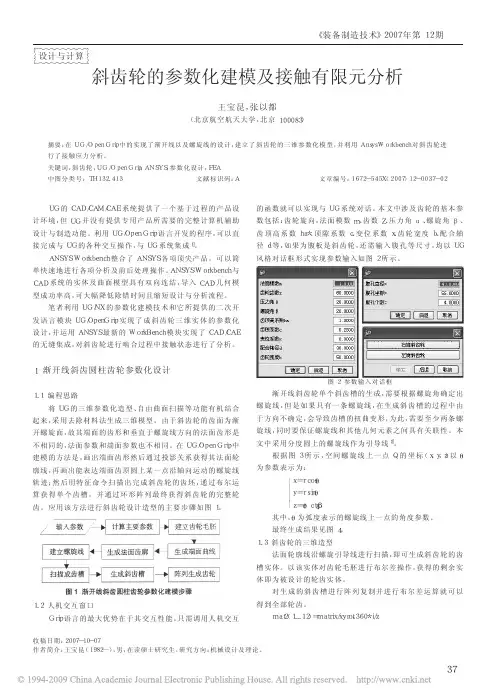
斜齿轮的参数化建模及接触有限元分析王宝昆,张以都(北京航空航天大学,北京100083)摘要:在UG/OpenGrip中的实现了渐开线以及螺旋线的设计,建立了斜齿轮的三维参数化模型,并利用AnsysWorkbench对斜齿轮进行了接触应力分析。
关键词:斜齿轮;UG/OpenGrip;ANSYS;参数化设计;FEA中图分类号:TH132.413文献标识码:A文章编号:1672-545X(2007)12-0037-02UG的CAD/CAM/CAE系统提供了一个基于过程的产品设计环境,但UG并没有提供专用产品所需要的完整计算机辅助设计与制造功能。
利用UG/OpenGrip语言开发的程序,可以直接完成与UG的各种交互操作,与UG系统集成[1]。
ANSYSWorkbench整合了ANSYS各项顶尖产品,可以简单快速地进行各项分析及前后处理操作。
ANSYSWorkbench与CAD系统的实体及曲面模型具有双向连结,导入CAD几何模型成功率高,可大幅降低除错时间且缩短设计与分析流程。
笔者利用UG/NX的参数化建模技术和它所提供的二次开发语言模块UG/OpenGrip实现了成斜齿轮三维实体的参数化设计,并运用ANSYS最新的WorkBench模块实现了CAD/CAE的无缝集成,对斜齿轮进行啮合过程中接触状态进行了分析。
1渐开线斜齿圆柱齿轮参数化设计1.1编程思路将UG的三维参数化造型、自由曲面扫描等功能有机结合起来,采用去除材料法生成三维模型。
由于斜齿轮的齿面为渐开螺旋面,故其端面的齿形和垂直于螺旋线方向的法面齿形是不相同的,法面参数和端面参数也不相同。
在UG/OpenGrip中建模的方法是,画出端面齿形然后通过投影关系获得其法面轮廓线,再画出能表达端面齿顶圆上某一点沿轴向运动的螺旋线轨迹;然后用特征命令扫描出完成斜齿轮的齿坯,通过布尔运算获得单个齿槽,并通过环形阵列最终获得斜齿轮的完整轮齿。
ANSYS齿轮接触应力分析案例齿轮是机械传动系统中常用的零部件,用于传递动力和转速。
在齿轮的工作过程中,由于受力情况复杂,容易发生接触应力过大导致齿轮损坏的情况。
为了确保齿轮的工作性能和寿命,需要进行接触应力的分析和优化设计。
ANSYS作为常用的有限元分析软件,可以用于进行齿轮接触应力的模拟和分析。
本文将以一个齿轮接触应力分析案例为例,介绍如何使用ANSYS软件进行接触应力的分析。
本案例以一对齿轮为例,通过对齿轮的建模、加载和分析过程,展示如何通过ANSYS软件进行齿轮接触应力的分析。
1.齿轮建模首先,在ANSYS软件中建立齿轮的几何模型。
可以通过CAD软件绘制齿轮的几何形状,然后导入到ANSYS中进行网格划分。
在建模过程中,需要考虑齿轮的齿形、齿数、模数等参数,并根据实际情况设置合适的几何形状。
2.设置加载在建模完成后,需要设置加载条件。
在本案例中,以齿轮传递动力时的载荷为例,可以通过施加力或扭矩来模拟齿轮的工作情况。
根据实际情况设置载荷大小和方向,以便进行接触应力的仿真分析。
3.网格划分接着对齿轮的几何模型进行网格划分,生成有限元网格。
在ANSYS中,可以通过自动网格划分功能或手动划分网格,确保模型的几何形状与加载条件得到合理的分析精度。
4.设置材料属性在进行齿轮接触应力分析前,需要设置材料的力学性质。
根据齿轮的实际材料属性,设置材料的弹性模量、泊松比等参数,以便进行接触应力的仿真分析。
5.运行分析设置完加载和材料属性后,可以进行齿轮接触应力的仿真分析。
在ANSYS中选择适当的分析模型和求解器,进行接触应力的计算和分布分析。
通过分析结果可以得到齿轮接触区域的应力分布情况,确定是否存在应力集中的问题。
6.结果分析最后,分析计算结果并进行结果的分析和优化。
根据接触应力的分布情况,确定齿轮的工作性能是否满足要求,是否存在应力过大导致损坏的风险。
如果需要,可以对齿轮的设计参数进行调整和优化,以提高齿轮的工作性能和寿命。
龙源期刊网
齿轮齿根应力和轮齿变形的三维整轮仿真
作者:杨生华李根国
来源:《计算机辅助工程》2013年第02期
摘要:使用高性能并行计算机和ANSYS有限元软件,通过精确产生齿根过渡曲线和齿轮三维实体模型,建立可靠的高精度的有限元网格模型和计算模型. 使用三维20节点等参单元计算,仿真一个真实齿轮整体模型的三维齿根应力和轮齿变形.二维模型和三维等效模型的仿真
计算误差和可靠性对比表明,该方法可为计算齿根应力和轮齿变形提供参考.
关键词:齿轮;过渡曲线;三维实体模型;可靠性;并行计算;有限元
中图分类号: TH132.41; TB115.1文献标志码: B
引言
计算齿轮齿根应力和轮齿变形是齿轮设计、研究的基本问题.过去,计算齿根应力和轮齿
变形时所用的模型一般为二维或三维等效轮齿模型,由于计算机的限制,计算模型存在误差,模型的可靠性低,计算结果与试验结果很难比较,造成重复试验.因此,有必要建立一个齿根
应力和轮齿变形计算标准,为齿轮设计研究人员和齿轮CAE研究人员提供参考.
随着计算机技术的发展,使用高性能计算,能对齿轮三维整轮模型进行仿真分析,并能精确计算齿轮齿根应力和轮齿变形.本文在曙光4000A超级计算机上对一个采煤机齿轮进行计算,计算模型的自由度为659万个,工况为5个,计算时间为2 h,使用4个2.4 GHz AMD Opteron 850 64位CPU,内存为8 GB.
1齿轮齿根应力和轮齿变形的计算
齿轮和加工刀具的参数见表1.其中,刀具为凸头滚刀,齿顶高系数为1,齿轮配合的轴直径(齿轮内圆直径)为90 mm,表中的凸台高度仅为加工后挖根凸台高度(计算凸台高度).。
1072013年9月下 第18期 总第174期1 概述随着齿轮传动向重载、高速、低噪、高可靠性方向发展,现代齿轮设计对齿轮传动系统的静、动态特性提出了更高的要求。
齿轮设计的主要内容之一是强度设计,因此,建立比较精确的分析模型,准确的掌握齿轮应力的分布特点和变化规律具有重要的意义。
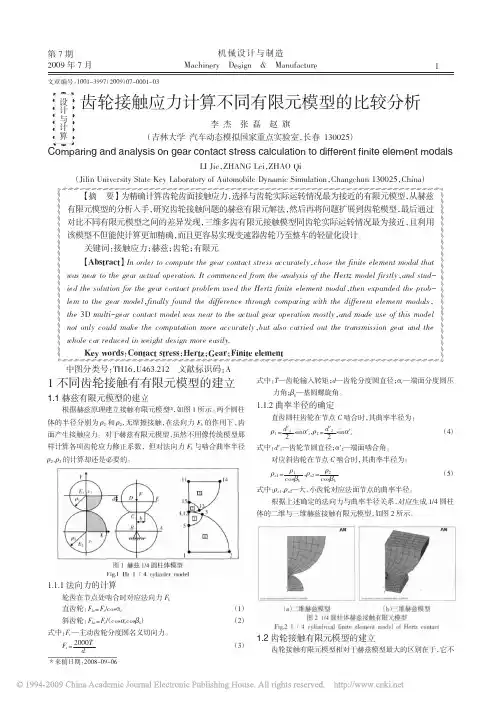
①③④设计模型的几何尺寸及边界条件如下表所示,大齿轮与小齿轮的齿厚为10mm,两个齿轮的中心距离为81mm。
小齿轮为主动齿轮,大齿轮为从动齿轮,小齿轮均匀转速0.2rad/s,大齿轮承受600N.m 的阻力扭矩,计算时间为1s.(如表1表2)2 模型的建立定义小齿轮渐开线,定义小齿轮根部过渡曲线,定义小齿轮齿廓线,建立小齿轮模型,同理建立大齿轮模型,调整两个齿轮的位置,如图1所示。
3 齿轮有限元网格模型的建立在Ansys中对齿轮副进行分析,首先要建立齿轮的有限元网格模型。
依据齿轮啮合模型参数,把根据齿面方程设计的专有程序计算结果导人Ansys,建立齿轮单齿有限元网格模型如图2所示。
针对所建齿轮模型,在齿高方向划分了17层单元,过渡部分划分4层单元,齿厚方向划分41层单元,为节省计算资源,省略了齿轮的辐板和轮载部分等对接触分析结果影响不大的部分。
该模型共有7896个节点,7678个单元,轮齿采用Solid45八节点线性等参元,将生成的单齿模型数据导人到Ansys中,并对其进行旋转复制等操作,把单齿模型拓展为有限元网格模型。
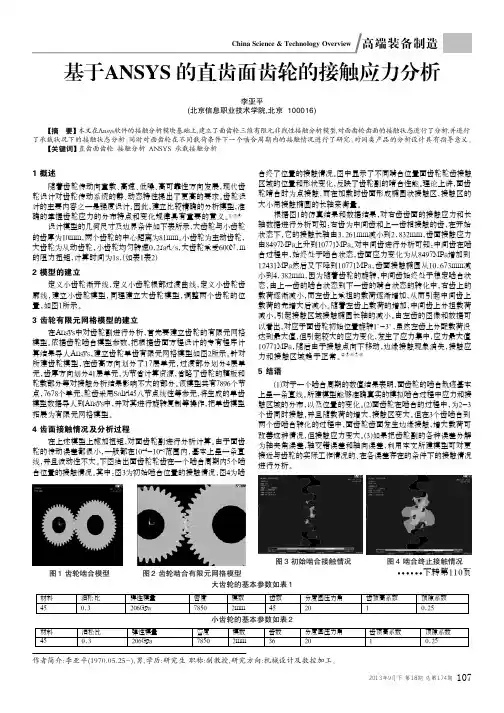
4 齿面接触情况及分析过程在上述模型上施加扭矩,对面齿轮副进行分析计算。
由于面齿轮的传动误差都很小,一般都在10-4-10-2范围内,基本上呈一条直线,并且波动性不大。
下图给出面齿轮轮齿在一个啮合周期内5个啮合位置的接触情况。
其中:图3为初始啮合位置的接触情况,图4为啮合终了位置的接触情况。
图中显示了不同啃合位置面齿轮轮齿接触区域的位置和形状变化,反映了齿轮副的啃合性能。
理论上讲,面齿轮啃合时为点接触,而在加载时齿面形成椭圆状接触区,接触区的大小用接触椭圆的长轴来衡量。
齿轮轮齿承载接触分析(LTCA)的模型和方法发布时间:2021-05-12T12:29:47.453Z 来源:《科学与技术》2021年第29卷第3期作者:韩彪[导读] 提出了齿轮承载接触分析模型。
研究了在缺陷状态下韩彪西安德立创自动化科技有限公司 710100摘要:提出了齿轮承载接触分析模型。
研究了在缺陷状态下,齿面的精确几何特性及其所产生的齿面和齿间自由度。
利用有限元柔度系数法对齿轮及其支承变形进行了计算,并对其进行了几何与力学分析。
关键词:齿轮轮齿;承载接触析;LTCA模型引言LTCA技术是目前国内外研究的热点之一。
齿轮学中,它是进行几何设计和力学分析的桥梁。
研究各种齿轮尤其是圆锥齿轮的结构、分析和制造技术具有重要意义。
但还没有解决几何分析与力学分析相结合的问题,有的研究主要集中在几何分析方面,力学模型过于简单,有的研究在几何分析方面不够充分,造成机械变形;有的研究过于繁琐,无法应用于技术领域,所以本文是一种将齿轮几何力学分析与计算方法相结合的 LTCA模型。
该方法计算简便,仿真度高。
1齿面展成与接触分析(TCA)和齿面啮合路径决定。
对每一个瞬时接触点,都能确定其主曲率和主方向。
在由于安装或传动支撑系统的变形而改变齿轮的相对位置时,转换矩阵[M] f. i.包括此变化。
所以本文在分析时考虑了误差和变形的影响。
3.1斜齿轮的LTCA以上述LTCA方法为例进行了计算。
考虑到凸出的齿廓,齿高中大约有12μm。
在理想情况下,当齿轮轴偏移时,载荷移动到齿宽的一端,从而引起载荷和张力集中。
从强度分析和振动分析中均能得到载荷分布,因此 LTCA在齿轮箱几何与力学分析中起着桥梁作用。
3.2弧齿锥齿轮的LTCA齿轮副的齿面分布在50纳米的输入时间。
考虑到轴的扭转和弯曲,从而使接触标记移向大端。
为了简化计算,在计算模型中没有考虑轴承变形和贮藏室变形,运动量较小。
4结论(1)建立了考虑精确几何特征、齿面、齿形变形、支撑变形及误差等几何及力学因素的齿轮箱 LTCA模型,仿真程度较高。
摘要:本文首先介绍了针对齿轮接触的有限元原理,其次根据齿轮结构特性及相关理论导出渐开线齿廓方程和齿轮啮合位置方程,在此基础上利用有限元方法进行模型构建,进行数值模拟,最后对数值模拟与仿真计算结果展开分析,结论与齿轮实际情况相吻合,以期对齿轮接触强度有限元分析领域有所贡献。
关键词:有限元原理;齿轮;接触强度;数值模拟中图分类号:th114 文献标识码:a1. 齿轮接触的有限元原理齿轮有限元接触理论包括静态分析和动态分析。
静态分析理论中,首先应满足弹性静力学控制方程(式1),这是静态分析的基础,同时附加法向和切向接触条件。
法向接触条件主要是用来判断主从动轮是否接触,且此时的法向应力为压力。
切向接触条件承接法向接触条件,即判断已发生接触的齿轮面之间的接触细节,选用相关模型重点研究其接触面的摩擦情况。
从理论上讲,啮合齿面的摩擦接触状态包括以下3种类型:(1)摩擦接触较为明显的黏结状态;(2)即将脱离摩擦条件的滑动状态;(3)不存在摩擦力的分离状态。
平衡方程式中:ζij,j―应力张量偏导;―体积力张量;uij,uji―位移张量的偏导;εij―应变张量;ζij―应力张量;g,λ―lame常数;δij,δkl―kronecher符号。
ku=q+f (2)式中:k―集成结构的刚度矩阵;u结构节点位移列阵;q―结构节点外部载荷列阵;f―结构节点接触载荷列阵。
因此,进行接触面分析时,首先应先定义齿轮啮合面的接触状态以及接触区,合理判定,并选择出合适的边界条件。
一般采用如式(2)所示的有限元方程来研究主从动轮接触问题。
动态分析的基本控制方程与约束条件与静态方法相似,其求解方程如式(3)所示。
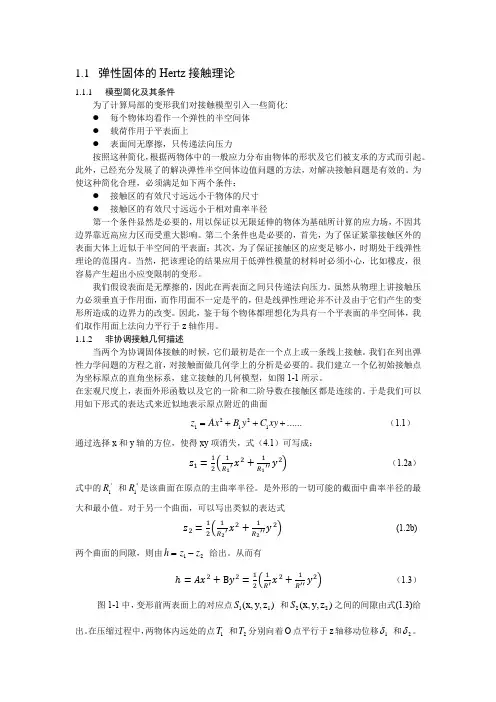
ζij,j+fi-μuit=ρui,tt (3)2. 渐开线齿轮啮合方程2.1 渐开线齿廓方程由端面参数相同的齿轮啮合渐开线以图2所示的齿廓曲线为参照通过移动重叠所形成的曲面作为渐开齿廓曲面。
图1所示中的点p为齿廓上的任一点,而点c为对应分度圆上的点。
EquipmentManufactringTechnologyNo.6,2008设计与计算"!"!!!!"!"收稿日期:2008-03-22作者简介:周秦源(1974—),女,湖南祁东人,讲师,硕士研究生,主要从事机械设计与制造方向。
齿轮接触应力的有限元分析在UG和ANSYS中的实现周秦源1,王雪红2,刘让贤1(1.张家界航空工业职业技术学院,湖南张家界427000;2.湖南工业职业技术学院,湖南长沙410007)摘要:基于UG平台,通过参数化方法建立齿轮模型,将.IGES文件格式将模型导入ANSYS软件,用有限元分析方法对齿轮节点处的接触应力进行了分析,进而对齿轮接触状态的强度性能进行了合理的评估,并校核了其结构的可靠性。
关键词:UG;ANSYS;齿轮;接触应力;有限元分析中图分类号:TH128文献标识码:A文章编号:1672-545X(2008)06-0054-03齿轮传动在运行工况下常常会发生齿轮折断、齿面损伤、塑性变形等问题。
导致传动性能失效,进而可能引发严重的生产事故,因而有必要对齿轮接触状态的强度性能进行合理的评估并校核其结构的可靠性。
为了更方便快捷的对齿轮对进行有限元分析,本文采用UG参数化特征建模方法和通用有限元软件进行齿轮轮齿三维接触有限元分析。
1基于UG平台建立齿轮参数化几何模型参数化是指用几何约束、数学方程与关系来表征模型的形状特征。
特征是指面向应用的、携带一定工程信息并确定几何拓扑关系的一组几何元素所构成的参数化形状模型,是参数化建模的关键要素[1]。
用特征的参数化建模方法可以精确、高效地建立各种齿轮轮齿的几何模型。
本文就是在商业化软件UG平台上,建立了齿轮轮齿参数化建模程序。
在此程序中,通过改变模型的基本参数,就可以得到与之相应的各种形状的轮齿模型。
进行齿轮轮齿参数化几何建模的方法如下:1.1确定基本参数基本参数是指进行齿轮结构设计的初始独立参数。
1齿轮接触分析方案ANSYS 软件分为三大基本步骤:(1)建立几何模型、网格划分以及边界约束和载荷的施加;(2)进行求解计算;(3)对求解结果进行显示、查看和进一步地迭代运算等。
ANSYS 有强大的、精确的求解功能,但其实体建模、网格划分、载荷和边界条件施加等能力相对较弱。
例如三维齿轮副在ANSYS 中建模、网格划分及施加扭矩都十分困难。
而UG 软件具有实体建模、装配建模、高级仿真、运动仿真、干涉检查以及载荷分析等功能,并能生成直观可视化很好的产品。
UG 自身也有CAE 功能,并且其网格划分、边界条件和载荷的加载功能也很强大、便捷。
综合UG 能完成有限元分析的前处理工作,而ANSYS 具有精确的求解器。
将2个软件的优点结合起来分析齿轮接触问题。
2UG 软件建立有限元模型2.1UG 中建立实体模型已知某减速箱的1对直齿轮参数:模数/mm5齿数35、52齿宽/mm 40压力角α/(°)20材料弹性模量E /Pa 1.98×1011泊松比μ0.284许用接触应力[σ]/MPa850打开NX 7.5,根据齿轮的参数在UG 中建立齿轮的几何实体,将建好的2个齿轮进行装配,装配好的齿轮模型如图1所示。
图1齿轮副的几何模型2.2UG 中建立有限元模型(1)求解器的设置将齿轮模型导入高级仿真环境,新建仿真。
在求解环境下,求解器的类型选择ANSYS 。
分析的类型根据设计要求选取结构(图略)。
在解算方案中设定类型为非线性静力学(图略)。
在处理梁、壳、实体结构,选用稀疏矩阵求解器。
它支持实矩阵与复矩阵、对称与非对称矩阵、拉格朗日乘子,即使病态矩阵也不会造成求解困难。
(2)定义实体材料、指派物理属性定义完实体材料之后,必须进行物理属性的指派,否则在求解或写入求解文件时就显示出错。
在有限元模型环境下设置材料属性,接着创建物理属性,选择实体SOLID1,其他项默认,最后单击网格捕集器,默认单元拓扑结构的各个选项设置内容,默认物理属性的类型。
齿轮系统动⼒学及接触问题摘要齿轮⾮线性接触特性及啮合刚度的研究对于齿轮接触特性的研究,可以采⽤解析法和数值法。
解析法包括材料⼒学计算法和弹性⼒学计算法等,数值法包括接触问题的有限元法和边界元法。
齿轮接触特性计算的解析法把啮合轮齿简化为两圆柱体通过Hertz公式计算接触应⼒及接触变形。
但由于齿轮齿廓曲率半径沿齿⾯变化,加之Hertz公式不能确定齿⾯接触疲劳强度计算中的累积塑性变形,因此其计算结果较为近似往往⽤修正系数(动载系数、齿向载荷分布系数、齿间载荷分配系数等)对接触应⼒进⾏修正。
对于齿轮接触变形的计算公式,G Lundberg、H .Winter、梅泽清彦、寺内喜男等分别采⽤材料⼒学和弹性⼒学⽅法进⾏了推导。
接触问题数值⽅法的研究始于70年代中期,⽽后得到⼴泛应⽤。
0.C. Zienkiewicz、A.Fr ancevilla、N .Okamoto、 J. T. Stadter、T .D .Sachdeva等分别⽤刚度矩阵修正法或间隙单元法研究了⼆维及三维弹性接触问题。
J.Tseng、陈万吉、李润⽅等提出了接触问题有限元混合法。
该⽅法以接触内⼒作为基本未知量,将整个系统总刚度矩阵凝缩到接触边界,形成关于接触内⼒的柔度⽅程,⼤⼤缩短了计算时间。
⽽后,李润⽅、陈万吉、B .C. Lee等将接触问题的表⾯⾮线性和材料⾮线性相藕合。
提出了有摩擦的弹塑性接触有限元混合法。
T.An dersion等提出了⼆维弹性接触问题的边界元法,⽽后逐渐发展到三维接触问题、热弹性问题等。
这些研究成果为齿轮接触特性的数值分析提供了理论基础。
S. M. Vijayakar⽤弹性接触有限元法研究了斜齿轮、锥齿轮、蜗轮蜗杆的接触应⼒。
李润⽅等对轮齿接触特性作了深⼊的研究考虑了轮齿的弹塑性变形、齿⾯摩擦、本体温度等的影响,并对轮齿啮合过程作分析,给出了最佳齿廓修形曲线等重要结论。
C.Gosselin等⽤有限元法分析了直齿轮和锥齿轮接触区的位移和应⼒,并与解析解进⾏了⽐较,两者相差20%以上。
第20卷第2期2003年4月 计算力学学报 ChineseJournalofComputationalMechanicsVol.20,No.2April2003
文章编号:1007-4708(2003)02-0189-06齿轮接触有限元分析
杨生华(煤炭科学研究总院上海分院,上海200030)摘 要:通过接触仿真分析研究了通用接触单元在轮齿变形和接触应力计算中的应用。建立了一对齿轮接触仿真分析的模型,并使用新的接触单元法计算了轮齿变形和接触应力,与赫兹理论比较,同时也计算了摩擦力对接触应力的影响。计算分析了单元离散、几何、边界范围与加载或约束处理方式的误差,建立了一个计算轮齿变形和接触应力的标准,说明了新的接触单元法的精确性、有效性和可靠性。
关键词:接触单元;轮齿变形;接触应力;计算标准;仿真分析中图分类号:TP391 文献标识码:A
收稿日期:2001-04-28;修改稿收到日期:2002-06-24.基金项目:上海自然科学基金资助项目.作者简介:杨生华(1963-),男,硕士生,工程师.
1 引 言计算接触非线性问题有许多方法,例如罚函数法、拉格朗日乘子法等,其中罚函数法由于其经济和方便而得到广泛使用。过去使用点-点接触单元,求解接触问题,对于象齿轮类接触,模型构造很麻烦,计算结果精度和准确性很难保证。随着计算机和有限元法的发展,新的接触单元法产生精确的几何模型,自动划分网格,自适应求解。新的单元计算精度更高,更有效,功能更强大。其中接触单元能非常有效地求解接触非线性问题,新的通用接触单元(包括点-面和面-面单元)特别适合于计算齿轮接触问题。在微机上能实现齿轮接触仿真分析,大大地促进了齿轮CAE的形成和发展。轮齿变形的有限元分析20世纪70年代已开始,但仅仅计算挠曲变形。接触变形和接触应力的有限元分析在20世纪90年代才真正开始。总之,过去的计算是基于试验的计算方法,计算方法是简化的、近似的,不够精确更不够可靠;没有使用有限元法研究轮齿接触变形和应力,并说明与赫兹变形和应力之间的差别,没有分析计算误差,没有考虑齿轮本体变形对轮齿变形的影响,没有计算摩擦力对接触应力的影响。文中使用ANSYS大型通用有限元分析软件,在个人计算机上建立齿轮接触仿真分析模型。通过两圆柱赫兹接触变形和应力验证其有效性和精度,分析计算了一对直齿轮的轮齿变形和接触应力,说明了新的接触单元法的精确性、有效性和可靠性。建立了一个计算轮齿变形和接触应力的标准或基准,给力学研究和机械设计人员一个参考。2 通用接触单元的赫兹计算为了检验通用接触单元的有效性和精确性,赫兹计算验证是必要的。两无限长圆柱有限元计算网格模型如图1所示。结构单元是具有附加形状函数的四节点等参单元(一次单元)。图中接触处网格边长为二十分之一接触半宽,该模型节点为7444,单元为7280(其中接触单元为80个点-面单元)。计算参数和结果如表1所示,理论结果按公式(1)-(4)计算[1]。计算结果表明:有限元计算结果和理论
计算结果一致,两圆柱变形计算误差仅分别为0.08%和0.045%。注意到公式(2)、(4)是按赫兹接触半无限空间推导的公式,因而是理论近似的(变形误差为1.7%、0.6%,应力误差为0.6%、0.4%),在接触点不远处一点的变形和应力与有限元计算结果基本一致,有限元计算结果略大于公式(2)和(4)与理论一致[1]。表1 两无限长圆柱接触分析Tab.1 Twocylindercontactanalysis
参数半径距离理论计算有限元计算R(mm)d(mm)WH(m)WdH(m)fmax(N/mm2)WH(m)WdH(m)fmax(N/mm2)圆柱138.0737.1986.1513.898229.5786.1463.966230.85圆柱263.6706.0056.7103.701229.5786.7073.722230.28
注:弹性模量:E1=E2=2.06×105N/mm2,泊松比:ν1=ν2=0.3,kn=10E1
表2 有摩擦接触应力分析(单位:N/mm2)Tab.2 Contactstressanalysiswithfriction(Unit:N/mm2)摩擦系数00(0.001)1(10)20.1(0.001)1(42)20.2(0.05)1(93)20.2(0.001)1(14)2
计算应力赫兹应力fmax(误差)3误差fmax(误差)3误差fmax(误差)3误差fmax(误差)3误差圆柱1229.578231.07(3.88)1.0%234.58(4.04)2.2%245.19(3.32)6.8%245.55(0.42)7.0%圆柱2229.578230.40(3.93)0.5%233.82(4.15)1.8%244.53(3.22)6.5%244.93(0.36)6.7%
注:上标1为力的计算收敛误差,上标2为迭代次数,上标3为误差估计[4]
罚参数大小与计算效率和精度有关,罚参数越小计算误差越大[2],但罚参数太大计算效率降低,而且由于单元离散本身有误差,计算精度不会有明显提高。因此罚参数有最佳范围,通常取1-10倍接触体的弹性模量。网格密度也与计算效率和精度有关,网格越密计算精度越高而效率降低。使用一次单元时摩擦力使得计算效率明显减低,需要更多的迭代次数,摩擦系数越大效率和精度越低。表2是摩擦力对接触应力影响计算,计算模型网格密度接触处只有图1中一半,但需要另一半的对称模型。无摩擦时,迭代次数为10,摩擦系数为0.1时,力的收敛误差为0.001,迭代次数为42;摩擦系数0.2时,收敛误差为0.05,迭代次数为93。摩擦系数大于0.2时,计算难于进行。而使用同样网格二次8节点等参单元和面—面接触单元,能有效计算有摩擦接触问题。当摩擦系数为0.2时,收敛误差为0.001,迭代次数为14。
a2=4PRπE*(1)p0=2Pπa
其中1E*=1-v21E1+1-v22E1, 1R=1R1+1R2
WdiH=P(1-v2i)πE*2ln(2dia)-vi1-vi
(2)
WH=P(1-v2i)πE*2ln(4Ri
a)-1(3)
fmax=0.3003p0(4)a是赫兹接触半宽,p0是最大赫兹压力,WH是接触变形,fmax是最大赫兹应力,d、R如图2。
3 轮齿变形和接触应力的计算实例3.1 齿轮参数表1是计算轮齿变形和接触应力的一对齿轮参数,所有参数通过精确计算,根据功率和转速计算出单齿啮合时额定载荷沿齿向分布力大小为F=386.5N/mm。
表3 计算一对齿形参数Tab.3 Parameterofapairofgear摸数压力角齿数变位系数顶圆半径齿数变位系数顶圆半径齿宽中心距功率转速mTZ1X1ra1Z2X2ra2bAP(kw)n820°290.1672125.25400.1687169.2634278.6060400
注:E=2.06×105N/mm2,ν=0.3,刀具圆角半径d=0.38m,刀具齿顶高hao=1.25m.
190计算力学学报 第20卷 3.2 轮齿变形和接触应力的有限元计算模型轮齿变形包括挠曲变形和接触变形及基础变形:轮齿挠曲变形计算模型的边界范围通常取一齿宽,计算的变形是轮齿对称中心点G的载荷方向(齿面法向)的变形;轮齿接触变形是载荷作用点至轮齿对称点之间的变形;轮齿基础变形为轮齿根部的弹性倾斜对轮齿变形的影响。为了计算方便,把基础变形包括在挠曲变形中。轮齿挠曲变形的单齿有限元模型如图2所示,边界范围为PQRS(图中为二齿宽,轮缘厚度1.5m)。过去轮齿接触变形用赫兹接触理论公式近似计算,但轮齿接触变形和赫兹接触变形之间存在多大误差,考虑轮齿基础变形影响的轮齿挠曲变形有限元计算的边界范围应该取多大,需要建立一对啮合齿轮接触有限元仿真分析模型,图3是三齿啮合接触计算模型。接触分析还能计算接触应力和应力分布,并能考虑摩擦力的影响,计算齿轮接触应力与赫兹接触应力之间的误差。3.3 计算模型的网格对齿轮接触分析来说,为了有效地生成网格,模型划分为接触区域,接触轮齿和非接触轮齿三个部分,接触单元最后再产生。由于自动生成的接触单元较多,需要控制接触面和目标面范围,接触范围一般不超过两倍的赫兹接触长度。图4是三齿接触一个模型网格,为了得到精确的变形,接触轮齿的相邻轮齿的网格也需要适当加密。为了得到精确的接触应力,接触处网格要更密些,通常单元边长为赫兹半宽的十分之一或更小。图4中接触处单元边长为赫兹半宽的十分之一,接触区半径为赫兹半宽的1.5倍,图中右下角为接触区网格放大图,该模型总节点数5632,单元数5325,其中接触单元为60个。对整轮接触仿真模型,接触模型的其余部分(即两齿轮本体)可用超单元表示[3]。3.4 轮齿变形分开计算和仿真分析结果比较轮齿变形的计算方法有两种:一种是分开计算,即轮齿的挠曲变形按图2模型计算,接触变形按公式(2)计算;第二种方法,建立一对齿轮的啮合接触仿真分析模型,进行接触分析而得出轮齿变形。表4为分开计算时和仿真分析计算结果,仿真分析时三齿接触网格模型如图4,整轮啮合接触计算模型两轮本体都为实心,两轮本体内圆直径(轴径)都为90mm。分开计算时轮齿挠曲变形单齿模型的边界范围PQRS相对两个仿真模型分别取二齿宽和三齿宽。仿真计算结果表明:接触变形按赫兹变形公式计算有误差,由于齿轮接触已经是非赫兹接触,按照公式(2)计算有-7%左右误差。单齿挠曲变形计算的误差来源于边界范围,轮齿挠曲变形边界范围PS、QR应在2~3齿宽之间,只要适当调整可以和仿真分析取得一致结果。轮齿变形受到齿轮本体变形的影响,局部和整轮仿真分析结果误差达-9.1%。3.5 轮齿接触应力仿真分析结果与赫兹应力计算比较轮齿接触应力计算方法也有两种:赫兹接触应力公式计算和有限元接触仿真分析计算。由于齿轮是渐开线轮齿接触,赫兹接触应力肯定是近似的,特别在有摩擦时,必然存在误差,而接触仿真分析能计算其误差大小。表5是有无摩擦接触时整轮仿真分析计算结果和赫兹接触应力比较,齿轮啮合时由于摩擦力造成接触力增加。由表中看出:齿轮实际接触应力比赫兹接触应力大,均超过5%。当摩擦系数从0提高到0.2时,赫兹接触应力误差达10%,而齿轮接触应力也提高5%以上,当载荷增加时赫兹接触应力误差也增加,3倍载荷时达10%,而且接触应力分布计算结果最大应力深度大于赫兹理论0.786a(a为赫兹接触半宽)。
191 第2期杨生华:齿轮接触有限元分析