NS1602-4型铁路救援起重机控制系统简析
- 格式:doc
- 大小:27.50 KB
- 文档页数:4
第30卷 第5期2009年10月大连交通大学学报JOURNAL OF DAL I A N J I A OT ONG UN I V ERSI TYVol.30 No.5 Oct.2009 文章编号:167329590(2009)0520015204基于P LC控制技术的铁路起重机电气控制系统谭晓东,李忠,李宝良(大连交通大学机械工程学院,辽宁大连116028)3摘 要:对NS1251型伸缩臂式铁路救援起重机的运行动作进行分析,并根据其电液比例控制的要求设计了采用P LC逻辑控制器的电气控制系统,着重介绍了控制系统的硬件设计和软件设计原理和设计思路.在此基础上对所设计的电气控制系统的应用情况进行了介绍.实践证明采用这种电控技术改善和提高了NS1251铁路起重机的可靠性、可操作性、维修方便性等,综合性能大大地超越了全液压控制的铁路起重机的性能.关键词:铁路起重机;电液比例控制;可编程逻辑控制器中图分类号:TP368.1文献标识码:B0 引言铁路起重机是一种在铁路救援时应用的起重设备.现阶段,我国铁路起重机的控制系统大部分采用液压式控制,控制油路复杂,给安装与维修、技术改进带来很大不便;部分控制回路采用继电器控制系统,可靠性差、操控性能低,大大制约了我国铁路起重机的整体性能[1].部分新型的起重机采用国外进口的专用控制系统,性能虽然好但价格高,配件、维修等难以保证[2].本文针对NS1251型铁路起重机的具体情况,采用P LC作为电气控制系统的核心,解决了NS1251型铁路起重机的控制问题.通过实际应用证明效果良好,企业已经将本文所论控制系统确定为NS1251型铁路起重机控制系统的标准配置.1 NS1251起重机的运行动作分析与对控制系统的要求NS1251型起重机的运行动作分为自力走行、变幅升降、吊臂伸缩、吊钩升降、重铁伸缩、左右回转、支腿动作、伸腿动作、均载支承等.动作顺序如下:吊重准备开始→根据现场环境的要求,设定接触网下或隧道中等环境的限高、限宽、回转角度等的限制参数(使控制系统在达到设定的要求后自动限制向限界外的区域活动,减少人工操作监视的工作量,提高安全性)→起重机工况的设定(既支腿角度、回转角度、重铁伸出距离、均载油缸状态等条件的选择,不同的工况数据决定了不同的起重性能)→起吊操作(当实际的起重载荷达到了额定起重载荷时马上进行安全保护,使起重机不能向危险的方向运行,但可以向安全的方向运行,当起重载荷降为额定载荷以内时,自动解除限动,起重机就又可以正常使用[1]).起重机液压控制系统是由多组电液比例阀构成的多路阀组进行液压控制的,如吊钩起升、变幅升降、吊臂伸缩、前后走行等动作是由电液比例阀控制液压缸和液压马达实现的,要求运动平稳、调速均匀、动作迅速、可靠.同时系统要实时地通过传感器监测操作环境和起吊载荷等保证动作的可靠.这就要求控制系统既要有逻辑控制功能又要有模拟量输入输出与处理和计算功能,充分保证控制系统数据处理的正确性和实时性[2].2 控制系统硬件设计根据上述对起重机动作及液压系统的分析可以整理出下列信号作为P LC的输入和输出.信号分类如下:3收稿日期:2008211206作者简介:谭晓东(1960-),男,副教授,学士,主要从事计算机测控技术的研究E2ma il:txd_f@.16 大连交通大学学报第30卷(1)控制命令数字量输入信号:吊具升降、变幅升降、吊臂升降、回转运动、行走运动、重铁运动等;(2)位置检测、限位等数字量输入信号:钩伸/幅降/臂伸限动、变幅升降限动、回转限动、三圈保护限动、重铁限动、合流/支腿均载等.升降、变幅升降、吊臂伸缩、左右回转、行走前后、重铁伸缩、状态指示等;(3)模拟量输入信号:变幅升降调速、吊臂升降调速、回转运动调速、行走运动调速、力矩限制器力矩信号;(4)模拟量输出信号:变幅升降调速控制、吊臂升降调速控制、回转运动调速控制、行走运动调速控制.根据上述信号的数量和信号性质要求,系统中采用了西门子S7-200P LC.具体硬件配置如下:(1)P LC主模块:CP U224XP,具有14点数字量输入10点数字量输出及2路模拟量输入1路模拟量输出.其中2路模拟量输入用于限矩传感器输入、1路模拟量输出用于吊具的速度控制、数字量I/O用于命令输入和检测及继电器控制等;(2)数字量扩展模块:E M223,用于命令输入和检测及电磁阀控制等;(3)模拟量输入模块:E M231,具有4路模拟量输入,用于变幅升降调速、吊臂升降调速、回转运动调速、行走运动调速速度命令的输入;(4)模拟量输出模块:E M232,2块,每个模块具有2路模拟量输出,用于变幅升降、吊臂升降、回转运动、行走运动的调速控制输出.硬件原理框图如图1所示,其中各动作速度命令是通过调节电位器将电压信号送入P LC模拟量口的,输入的电压信号为±10V,同时将动作方向信号通过数字量接口送入P LC.各动作调速控制的输出是通过模拟量输出口控制电液比例阀放大器,从而控制比例阀的开度,实现对液压缸或液压马达调速的,输出信号为±20mA电流信号.数字量输出控制继电器的开关从而控制哪路电液比例放大器工作等.人机界面用来设定控制参数,如吊装载荷、限位位置、操作速度等.图1 硬件原理框图吊装工作时会将吊装重量、吊臂角度、高度、回转角度等技术参数输出在人机界面上,使操作人员及时了解当前起重机的状况.另外当某个参数超过了安全设定值时发出警报,向操作人员报警,同时关闭工作电磁阀产生保护动作,确保操作安全.3 控制系统软件设计控制软件根据各种设定参数和输入条件进行分析、计算并进行判断,若工况条件正确,则可以起吊.司机输入操作指令,P LC根据指令,结合起重性能的要求,实时检测各传感器状态,判断是否有异常情况,进行正常的吊重作业.当发生过载信号时,自动限荷,禁止起吊,再由司机操控减载后,从新起吊或从新设定个限制参数.其系统软件原理框图见图2. 第5期谭晓东,等:基于P LC 控制技术的铁路起重机电气控制系统17 图2 软件原理框图从软件框图中看到除了安全条件判定外,系统中一个最重要的功能模块就是逻辑运算,系统靠这部分运算进行动作互锁、动作关联、动作顺序控制.如吊钩上升输出,其控制程序功能块图如图3所示,其中:I 1为吊钩上升动作命令;I 9为吊钩上升限动输入;M 2为变幅动作中间变量;M 3为吊臂伸缩动作中间变量;M 4为回转动作中间变量;M 5重铁伸缩动作中间变量;M 6为支腿均载动作中间变量;Q 11为行走动作输出;Q 1为吊钩上升动作输出.图3 吊钩上升部分程序功能块图从中可以看出吊钩上升动作的逻辑条件:吊钩上升限制为“非”且变幅动作、吊臂伸缩动作、回转动作均停止;前提条件为支腿均载与重铁移动到位.18 大连交通大学学报第30卷4 结语采用本文所述的控制系统控制铁路起重机能够使系统的可靠性大大提高、操控性能得到大幅度改善.用P LC作为其控制系统的地核心控制装置比起传统的继电器控制系统性能有了根本性的改变,比起国外购入的专用控制系统有着价格低廉、功能扩展容易、配件易得、维修方便等优点,保证了系统的高效、可靠等性能要求.采用人机界面实时监控起重机的各种状态,与P LC一起保障了起重机的安全性要求.本文所述的控制系统的主要思想和大部分功能模块用于NS1251型伸缩臂式铁路救援起重机,取得了很好的效果,大大提高了起重机的综合性能.通过实际应用认为系统的性能还有提升的空间,例如实时位置检测和位置控制以及各动作的插补协调运动控制,可进一步提高铁路起重机的操控性和安全性,更大幅度提高设备的效率.参考文献:[1]聂崇训.铁路起重机控制系统[J].工程机械,2008(6):77278.[2]罗欣,李晓峰.电液比例控制技术在全液压铁路起重机液压系统中的应用研究[J].齐齐哈尔大学学报, 2007(4):27230.[3]SI E ME NS.S7-200手册[M].北京:科学技术出版社,2003.[4]成大先.机械设计手册[M].北京:化学工业出版社,1996.[5]郭宗仁,吴亦锋,郭永.可编程序控制器应用系统设计及通信网络技术[M].北京:人民邮电出版社,2002. [6]吴根茂.新编实用电液比例技术[M].杭州:浙江大学出版社,2006:1222140.[7]杨逢瑜.电液比例技术与电液闭环比例技术的理论与应用[M].北京:清华大学出版社,2009:12100.[8]龙庆华.单片机自控系统在NS0631型轨道起重机上的应用[J].天津冶金,2003(4):41243.Ra ilway Crane Con trol Syste m Ba sed on Programmable L og i c Con trollerT AN Xiao2dong,L I Zhong,L IBao2liang(School of Mechanical Engneering,Dalian J iaot ong University,Dalian116028,China)Abstract:T o meet the requirements of rail w ay crane contr ol,a crane perf or mance is analyzed and a contr ol sys2 te m based on p r ogra mmable l ogic contr oller is p resented.By utilizing the analysis of p r ogra mmable l ogic con2 tr oller I/O the l oad signal and act s peed commends are input t o contr oller CP U,and s peed contr ol signals are out put t o electr o2hydraulic p r oporti onal a mp lifier fr o m the CP U.This contr ol syste m is app lied t o a NS1251 rail w ay crane,and results indicate that the syste m i m p r oves the efficiency,reduces the asse mbling and mainte2 nance ti m e of the rail w ay crane,and its general perf or mances are much higher than that of the full scale hy2 draulic contr ol rail w ay crane.Key words:rail w ay crane;electr o2hydraulic p r oporti onal contr ol;p r ogra mmable l ogic contr oller。
探析起重机电气控制系统内蒙古赤峰 024000摘要:起重机电气控制系统当中,非常重要的一项内容是安全与可靠。
因为起重机的机构之间存在着相对复杂的工况,促使控制系统线路变得更为复杂化,不利于调试工作的积极开展,也不利于维护与维修工作的顺利实施。
从传统故障当中发现,当起重机电气控制系统发生故障的时候,需要立即采取停机操作,并且要由专业工作人员,详细排查复杂的电气控制系统中存在的故障。
关键词:起重机;电气控制系统如今我国运输业的快速发展,起重机在运输装卸过程工作中广泛应用。
而起重机的运作离不开各种电气设备的支持,但电气故障的出现对起重机的运作效率和安全性都带来了不利影响。
对此文章围绕起重机电气设备危害因素的影响进行分析,就危害因素的应对提出了系统优化设计的相关问题分析,并探讨电气设备危害因素的预防策略。
1起重机控制系统的发展趋势信息科学技术的发展促进起重机控制向信息化、智能化的方向发展。
在现代信息科学技术中愈来愈多地采用了语音识别技术、图像识别与处理技术、传感控制技术等智能控制技术,并引入专家控制、模糊控制等先进的控制理论。
近年来智能技术的研究持续开展并且取得了较大的进步,随着认知科学与电子信息技术的发展,人工智能技术在各行业将会愈来愈多地得到应用。
同时,智能技术的发展也将促进起重机自动化水平的提高,对我国工业化的发展起到积极的促进作用。
2起重机电气控制系统的设计思路2.1可靠性设计对于产品的预期安全和失效状态进行预估,这是保障可靠性设计能够顺利进行的关键点,也是针对性提升产品可靠性的核心环节。
配置产品系统子集的冗余设计指标,比如元器件、组件和执行单元等,是在起重机电气控制系统冗余设计初期需要开展的关键工作,起重机电气控制系统投入运行后的工作状态,应该通过分析其功能、元器件、使用环境和多因素之间的相互关系进行预估。
为了能够对起重机电气控制系统在实际工作环境下的工作状态、工作能力和寿命进行预测,需要建立力学模型与数学模型,并在故障数据统计分析和试验的帮助下,完成起重机电气控制系统的冗余设计。
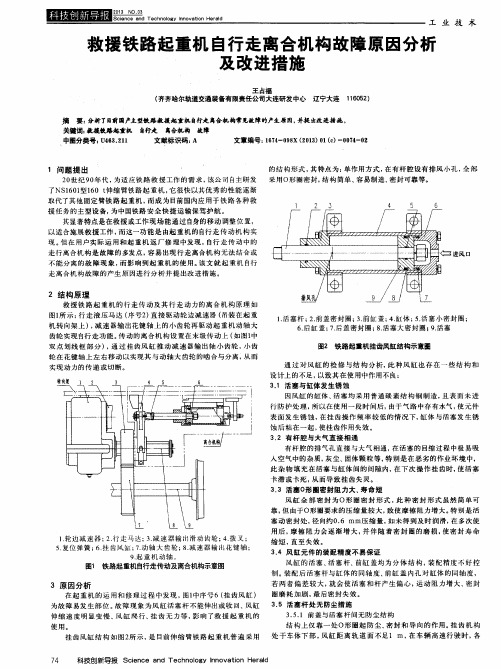
160t伸缩臂式铁路起重机液压系统的设计刘 洋160t T elescopic Railway Crane Hydraulic System DesignLiu Y ang(齐齐哈尔铁路车辆(集团)有限责任公司技术中心,黑龙江省齐齐哈尔市 161002 电话:(0452)2938455) 摘 要:介绍了160t伸缩臂式铁路起重机液压系统的设计特点及阀控无级调速的原理,着重介绍了液压系统各动作回路的原理及特点。
关键词:铁路起重机;阀控系统;液压回路中图分类号:TH13717 文献标识码:B 文章编号:100024858(2001)07200032041 概述随着我国铁路电气化线路的建设及电气化线路的改造,我公司开发出了160t伸缩臂式铁路起重机。
该机主要是为铁路机车车辆事故救援、大型货物装卸、重型设备安装、铁路公务等工作,尤其在山区隧道内、电气化铁路接触网下作业,性能十分优越。
该机的主要技术参数是,在使用支腿的情况下,幅度615m时,起重量为160t,360°回转;幅度1417m时,起重量84t,顺轨±30°回转;幅度9m时,起重量160t,顺轨±10°回转。
亦可使用羊角钩,在隧道内、电气化铁路接触网下,起重70t。
该机设有2套动力系统,如果在救援过程中主柴油机或主泵出现故障,可临时起动副柴油机,副机的作用是将起重机各动作复位,调整为回送状态,由机车牵出救援现场。
收稿日期:2001201205 作者简介:刘洋(1965—),男,黑龙江省齐齐哈尔市人,工程师,学士,主要从事铁路起重机液压系统设计工作。
以外,其他配套件大部分是从专业厂采购来的。
因为配套件是专业化生产,其质量都有保证,并且生产成本低即配套成本低,只要自己把阀体、阀芯制造好就可以了。
因为产品的自制零件品种少,可以集中财力、技术力量进行设备收造,因为是专业化生产,可以采用生产效率高的生产线。
叉车司机三级测试题与参考答案一、单选题(共60题,每题1分,共60分)1、滚动轴承轴箱顶部温度如果比外界气温高()以上,则属于非正常现象,应立即打开轴箱盖检查。
A、20℃B、50℃C、30℃D、40℃正确答案:D2、WD615.64G-12型柴油机启动时,如果连续()不能启动时应停止启动,找出原因排除故障后再启动。
A、一次B、二次C、三次D、四次正确答案:B3、NS1602型起重机的起升机构的定滑轮组和动滑轮组由()尼龙滑轮组成。
A、10片B、12片C、14片D、8片正确答案:D4、KRC1600HA型起重机起重臂的工作半径(总的工况)为()。
A、6.5m+7mB、6m+7mC、6.5m+7.5mD、7m+8m正确答案:A5、N1002型轨道起重机不使用支腿,副钩起重量15t时,工作幅度最大为()。
A、6.5mB、9mC、8mD、7m正确答案:A6、装备图必须具备一组视图,它包括()内容。
A、4项B、5项C、3项D、2项正确答案:A7、柴油机冒白烟是因为()。
A、喷油器雾化不良B、调节器故障C、燃油中含有水分D、进气系统故障正确答案:C8、回转支承工作后第一个50h和200h,应检查一次螺栓的预紧扭矩,以后每()检查一次。
A、600hB、500hC、800hD、400h正确答案:B9、N1601型起重机走行减速器的作用是将液压马达输出的()传递给转向架的动轴和车轮,以实现自力运行。
A、转速B、动能C、扭矩D、压力能正确答案:C10、NS1602型起重机臂架平车两端配置外接()输入电源插座。
A、DC28V/18VB、AC220V/DC28VC、AC380V/220VD、AC220V正确答案:C11、按搓拧方向,其柔性和耐磨的钢丝绳为()。
A、混合搓钢丝绳B、反搓钢丝绳C、普通结构钢丝绳D、顺搓钢丝绳正确答案:D12、NS1602型起重机液压传动系统换油后,启动发动机,回转机构、卷扬机构空运转,各运转()往复行程。
NS160GT型铁路起重机提速改造方案设计
王杰
【期刊名称】《机车车辆工艺》
【年(卷),期】2010(000)003
【摘要】在N1602型铁路起重机性能和结构研究的基础上,通过动力学性能和制动性能的分析,提出了主机转向架和制动系统的提速改造方案,为铁路起重机提速改造提供了思路和工艺.
【总页数】3页(P12-14)
【作者】王杰
【作者单位】南车成都机车车辆有限公司,四川,成都,610057
【正文语种】中文
【中图分类】U215.5+52
【相关文献】
1.NS1003型铁路起重机铁路桥梁通行能力研究 [J], 刘振营
2.基于现代设计技术的铁路起重机方案设计专家系统 [J], 赵正佳;黄洪钟;陈新
3.完善铁路起重机安全监控系统的方案设计 [J], 黎长富
4.NS100GA型铁路起重机的提速改造 [J], 黄强
5.某型门座起重机臂架根部变形原因分析及维修方案设计 [J], 罗凯
因版权原因,仅展示原文概要,查看原文内容请购买。
叉车司机练习题库含参考答案一、单选题(共79题,每题1分,共79分)1.联轴器在使用中,如果两轴间有较大的偏角位移(35°~45°)时,应选用()。
A、固定式联轴器B、十字滑块联轴器C、万向联轴器D、齿式联轴器正确答案:C2.NS1602型起重机的燃油箱装油量为()。
A、700LB、600LC、500LD、800L正确答案:C3.JZ-7当列车施行小量减压时,由于列车管压力的降低,()压力将副阀膜板推向左移。
A、降压风缸B、工作风缸C、作用风缸D、紧急风缸正确答案:A4.使用手锯时,锯割速度应掌握在每分钟往返()。
A、10~20次B、30~40次C、40~50次D、20-30次正确答案:B5.三相交流电机采用星形接法时,线电压与相电压的关系是()。
A、U相≈l.22U相B、U线=U相C、U线≈1.732U相D、U相≈1.732U线正确答案:C6.动车后退的音响信号显示方法为()。
A、二长声B、一短一长声C、一长一短声D、一长声正确答案:A7.DF7型机车的承吊孔直径是()。
A、130mmB、127mmC、126mmD、170mm正确答案:A8.发电车KD25z的自重为()。
A、57tB、58tC、58.5tD、59t正确答案:D9.N1601型起重机其轴距为()。
A、1500mmB、1200mmC、1300mmD、1400mm正确答案:C10.液压泵中的液压控制阀的主要作用是控制和调节液压系统中介质的压力、流量和A、方向B、位能C、流速D、强度正确答案:A11.钢丝绳的报废标准主要由在一个捻距范围内的断丝数决定,而交互捻的总断丝达()应予报废。
A、25%C、10%D、5%正确答案:C12.NS1602型起重机上共使用支腿水平油缸()。
A、2个B、6个C、8个D、4个正确答案:D13.N1002型起重机臂架平车最大高度为()。
A、4525mmB、4400mmC、4727D、4399mm正确答案:D14.Nl601型起重机在作业过程中,控制油路压力应保持在()不得随意提高。
NS1602-4型铁路救援起重机控制系统简析
摘要:NS1602-4型铁路救援起重机是武桥重工集团股份有限公司研制制造的一种用于铁路机车车辆颠覆和脱轨事故的救援工作,同时兼有驻在地沿线大吨位构件的安装和重型货物装卸的自行式起重机,本文对该设备的电气及控制系统进行了阐述。
关键词:铁路救援起重机;控制系统;安全保护
NS1602-4型铁路救援起重机为伸缩臂式铁路起重机。
该机额定起重量160吨。
具有带载伸缩、带载变幅、带载自行等功能。
它主要用于铁路机车车辆颠覆和脱轨事故的救援工作,同时兼有驻在地沿线大吨位构件的安装和重型货物的装卸用途。
整车外形和电气布置图见图1。
图1NS1602-4型铁路救援起重机整车外形图
NS1602-4型铁路救援起重机电气系统大致可分为:安全保护系统、驾驶室布置与控制、动力系统电气控制。
一、安全保护系统(CAN-Bus)A
由一台上位计算机和一台下位计算机(现场单元)构成该系统,不同的是系统上位计算机是一台标准工业级计算机,管理整车的安全控制。
BML-6C-WP 系统是到目前唯一具有国家命名的带有WP的标志的力矩限制器。
“WP”的含义是微型计算机控制的力矩限制器。
起重机的各种姿态的信号采集通过CAN-Bus的传输,交给一台的工业计算机处理自动完成对起重机的安全状态做出曲线的调用以及评价,全过程无需人为干预,有效避免错误的操作,可能引起的严重后果。
系统采用的是大容量CF卡的存储方式,使得信息的存储能力得到大幅度提升,是原单片计算机的数据记录仪容量的2~3倍。
高可靠性工业计算机,是可靠性的基本保障,结构上的自然冷却系统+PC104 Bus的工业级计算机可正常工作在- 40℃~+75℃, 使得工作可靠性得到进一步提升。
管理系统(二)发动机仪表+车辆状态显示(CAN-Bus)B
它由一台上位单片计算机(虚拟仪表)和一台下位计算机构成该系统,主要功能负责监管二台同功率发动机的各自的运行参数,液压回路的主要指标车辆滤油器的工作状况以及,下车体的平衡情况。
照明全部为高压卤素灯,驾驶室
上部为姿态可调远射强光灯,以及臂杆中灯等。
增设有现场信号系统便于乘务员和现场指挥人员的交流。
二、驾驶室布置与控制
下图为驾驶室平面布置图
图示说明:
①、动力控制板:包含总电源、二台同功率发动机控制、动力部分信号显示以及动力部分的辅助控制。
②、动作控制板:全保护系统的显示和控制,各种动作的控制,照明灯光的控制、现场信号系统的控制。
③、喇叭踏板:制电喇叭,在起重机作业时提醒现场人员注意。
④、动力速度踏板:控制发动机速度踏板。
⑤、左控制手柄:控制起重机左右回转、吊钩升降动作。
⑥、右控制手柄:控制起重机臂杆伸缩、变幅升降动作。
⑦、空调控制器:控制驾驶室内空调之用。
⑧、车辆制动手柄:车辆斜坡停车制动用。
三、动力系统电气控制
3.1动力部原理
3.1.1电源的备用和供给
车辆电源是由一组12V 200A.H(二台)蓄电池组A和一组12V 8A.H(二台)蓄电池B与二台28V 1.5KW 硅整流发电机构成,200A.H蓄电池是为发动机起动时提供能量的,8A.H蓄电池保障在发动机启动时可能引起系统电压大幅度波动,以保护安全保护系统正常工作的电源。
二台硅整流发电机其任务在发动机运行时向蓄电池提供补充电力同时负担起全车电源的使用。
其中蓄电池组A和蓄电池组B之间有D3二极管在电路中串接,从而保证在蓄电池A的电压剧降的短时间内,安全保护系统的电源由蓄电池组B暂时接管,不受电压波动的影响
3.1.2电源的控制、电源极性反接保护与延时断电。
电源的接通和切断均由SA0电锁控制DSK1电磁式直流接触器进行的,电锁上带有电源指示灯指示控制的状态。
因车辆中有大量的电子设备,同时蓄电池的检修工作也是不可避免的,防止因蓄电池极性接反可能引起的灭顶之灾。
电路中D1二极管提供在蓄电池供电极性反接时整车不能接通电源的反接保护功能。
3.2发动机的控制
因二台发动机是同功率的,因此发动机部分的控制也是一样的,这里只是对一台的原理作出必要的说明。
发动机的控制,由对应的发动机电锁控制,SK1是1#发动机的,则SK2是2#发动机,发动机电锁共四个档位从左到右“预热”、“停止”、“工作”、“起动”。
只有对应的电锁在“工作”位时对应的发动机控制电路才获电可以工作(下面对发动机电锁简称为“电锁”)
上图为电锁的控制位和底部接线图。
3.3发电机
发电机为自励磁硅整流直流发电机,本身自带有发电机调节器,将发出的电压自动稳定28~29伏之间,该发电机输出功率为1.5KW 额定电流65A ,为避免因发电机故障导致供电系统崩溃,在每台发电机的输出端安装一台直流空气开关,作为输出保护。
3.4发动机仪表
发动机在运行中主要指示仪表转速、机油压力、冷却液温度,另外设有燃油量、系统电压,采用虚拟仪表方式显示。
3.4.1发动机信号的转换
发动机本体出来的信号,上CAN总线前,必须经过预处理后成为计算机所能识别的标准信号,在每个传感器的输出端,加设信号调理模块“GT1……”,因各信号的不同,模块的功能有所不同,二台发动机的信号调理模块是一一对应的。
3.5动力控制面板
3.6发动机辅助设备
3.6.1燃油泵
为防止发动机长期搁置,燃油回路有渗入气体,造成起动困难,电气辅助设备设有燃油加压泵二台,每台发动机各一台,在车辆闲置时间过长时,起动前,可通过面板上的SK6开关对要发动的机器进行燃油加压,而后在起动发动机.应注意燃油泵电机是短时工作制,长时间使用可能会引起电机的损坏,这也是为什么SK6燃油泵开关是自复位开关的原因所在。
3.6.2雨刷控制
在雨天工作时,为了保证驾驶人员有良好的视线,车辆上安装有两台雨刷,一台位于司机室前玻璃上,另一天位于司机室顶部玻璃上,两台为双速控制方式,控制开关由SD3承担,SD3是3档控制开关,左边档是停止位,向右旋转,分别是“正常”与“快速”。
电气中设有喷水装置的控制按键为“AN4”。
在使用的过程中不要干刮雨刷,这样可能会引起雨刷电机过载而损坏。
3.6.3电气故障指示灯
在动力控制面板上,左上方有一“电气故障指示灯” 该灯如果被点燃,则说明机房内有空气开关未合上或跳闸了,请根据电气原理找出问题所在,排除之。
综上所述,NS1602-4型铁路救援起重机所采用的控制系统对安全监控、安全防护、现场实际施工操作等方面都能够起到实时监控、实时记录的效果,从而保障现场救援工作的顺利开展,为救援工作争分夺秒。