电动车辆无级变速驱动系统、变速控制系统及方法与设计方案
- 格式:pdf
- 大小:103.78 KB
- 文档页数:14

睿控技术详解睿控™系统,是由“电动四化”、“智能四化”组成的尖端科技。
电动四化包括驱动电动化、冷却电动化、转向电动化和制动电动化;智能四化包括发动机启停智能化、驱动管理智能化、全车CAN控制智能化、远程技术支持智能化。
睿控™系统能够精确地判断车辆的实时状态。
智慧匹配最佳的动力组合方案,使车辆的发动机工作时间更短,效率更高,燃料燃烧更充分。
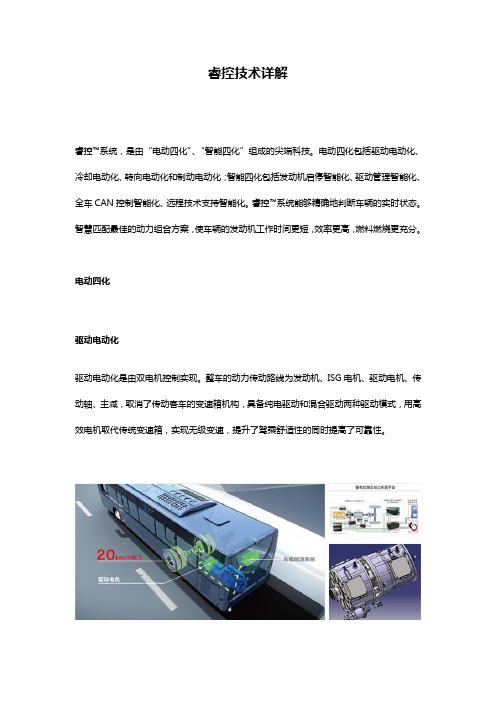
电动四化驱动电动化驱动电动化是由双电机控制实现。
整车的动力传动路线为发动机、ISG电机、驱动电机、传动轴、主减,取消了传动客车的变速箱机构,具备纯电驱动和混合驱动两种驱动模式,用高效电机取代传统变速箱,实现无级变速,提升了驾乘舒适性的同时提高了可靠性。
转向电动化转向电动化是指双模电动液压助力转向系统,利用先进的动态变频技术,控制转向系统输出功率,满足转向助力需求,有效降低了转向的能耗,并彻底解决了转向异响、回正性能差的问题,使转向更轻便,能耗更低。
冷却电动化冷却电动化由发动机温控无级调速电子冷却风扇实现。
电子风扇控制器ECU通过CAN总线读取发动机水温及中冷器温度,当发动机水温或中冷器温度达到ECU内部标定的温度参数后,电子风扇控制器ECU控制冷却风扇工作,根据实际散热需求,风扇的转速智能无级调速,高效节能。
制动电动化制动电动化也就是再生制动能量回收技术,汽车制动时,驱动电机转为发电模式,将制动能量转化为电能存储到车载能源系统中,从而减少制动损失,将制动能量回收,用于下一次的驱动,做到能量的再生利用。
电动四化发动机启停智能化睿控™的节能控制最重要的手段即是IST智能启停系统,它可以保证汽车在起步、到站、停车、滑行等功率需求较小时发动机快速停止工作,在功率需求较大时,发动机瞬时启动。
这样做,可以使发动机的工作与否取决于实际需求,做到能量的按需分配,从而拒绝浪费。
(注:此项不适用于纯电动车辆)驱动管理智能化驱动智能管理系统,也就是整车控制系统。
基于公交工况下客车从油箱到车轮的能量消耗分析,以实现发动机的高效工作区域控制、整车能量流高效传递、合理降低工况耦合为基本出发点,从睿控系统零部件级、系统级和整车级等三个层次应用节能技术,新能源大客车节省燃料进一步提高到40%。


摘要电动汽车的再生制动,就是利用电机的电气制动产生反向力矩使车辆减速或停车。
对于感应电机来说,电气制动有反接制动、直流制动和再生制动等。
其中,能实现将刹车过程中能量回收的只有再生制动,其本质是电机转子的转动频率超过电机的电源频率,电机工作于发电状态,将机械能转化为电能通过逆变器的反向续流二极管给储能装置充电。
本文简要介绍再生制动系统的种类及其发展过程,分析了国内外再生制动系统的研究动态及发展趋势,掌握其原理,设计出一台再生制动系统试验台。
试验台主要通过一个无级变速装置实现传动比的改变,配合其他装置,实现能量回收。
其中,对核心装置,使用CAD画出其原理图,并使用CATIA等三维软件进行建模。
本文最后对自己所做工作进行总结,探讨了设计方案中可能存在的问题,并对下一步的工作进行了展望。
关键词:再生制动系统、试验台、无级变速器、模型周勐:混联式电动汽车再生制动系统实验台设计AbstractElectric vehicle regenerative braking, reverse torque developed is the use of electric braking of the motor vehicle to slow down or stop. For induction motor, the electric braking is dc braking and regenerative braking, reverse connect braking, etc. Which can achieve the braking energy recovery is only in the process of regenerative braking, its essence is the power of the motor rotor rotational frequency over the frequency, the motor working in power state, convert mechanical energy into electrical energy through the inverter the reverse of the fly-wheel diode recharge energy storage device.This paper briefly introduces the kinds of regenerative braking system and its development process, and analyzes the domestic and foreign research status and development trend of regenerative braking system, master the principle, design a regenerative braking system test bench. Test stand is mainly achieved by a stepless speed change device transmission ratio of the change, cooperate with other devices, to achieve energy recovery. Among them, the core device, use CAD draw its principle diagram, and using CATIA three-dimensional modeling software. Finally to summarize their work, this paper discusses the design scheme of the problem4, and the further work is prospected.Key words: Regenerative braking system, test bench, stepless transmission, model目录摘要 (I)ABSTRACT (II)引言 ................................................ 错误!未定义书签。


变速箱发展史变速箱是汽车中的一个重要部件,它的发展史可以追溯到汽车诞生之初。
随着科技的不断进步和人们对汽车性能需求的不断增加,变速箱也在不断演进和改进。
本文将以人类的视角,通过叙述的方式,详细介绍变速箱的发展史。
一、手动变速箱的诞生手动变速箱是最早应用于汽车上的一种变速装置。
早期的汽车主要是由内燃机、传动轴和驱动轮组成,但由于内燃机的输出转速范围较窄,无法适应不同车速下的动力需求。
为了解决这一问题,人们开始研发手动变速箱。
手动变速箱通过齿轮组合的方式,实现了不同档位的切换,使汽车在不同条件下都能提供合适的动力输出。
二、自动变速箱的出现手动变速箱虽然解决了汽车动力输出的问题,但操作复杂且需要驾驶员不断换档。
为了提升驾驶的舒适性和便利性,自动变速箱应运而生。
自动变速箱通过液压系统和离合器的组合,实现了自动换档的功能。
驾驶员只需要选择驾驶模式,并踩下油门,变速箱就会自动根据车速和转速进行换档操作。
自动变速箱的出现大大提升了驾驶的便利性,使得驾驶员可以更加专注于驾驶本身。
三、多速变速箱的发展随着汽车技术的不断进步,汽车的速度和功率也不断提升。
为了适应高速公路驾驶和提升燃油经济性,多速变速箱开始逐渐取代传统的手动和自动变速箱。
多速变速箱通过增加齿轮数量,实现了更多档位的切换。
这使得汽车在不同速度下都能保持合适的转速,提高了动力输出效率和燃油经济性。
四、双离合器变速箱的兴起双离合器变速箱是近年来变速箱技术的一大突破。
传统的自动变速箱通过液压系统和离合器的组合实现换档,但由于液压传动的特性,换档速度相对较慢。
而双离合器变速箱通过双离合器的设计,实现了快速换档。
其中一个离合器负责当前档位的传动,另一个离合器则准备下一个档位的传动。
这使得换档时间大大缩短,提升了驾驶的动力响应和平顺性。
五、电动汽车的变速箱随着电动汽车的兴起,传统的机械变速箱逐渐被电动驱动系统取代。
电动汽车的驱动系统通常由电动机和电控系统组成,其中电动机的转速范围较广,无需传统变速箱的切换。
导读:电动汽车可分为两种:单电机集中驱动型式电动汽车(简称集中驱动式电动汽车)和多电机分布驱动型式电动汽车(简称分布式驱动电动汽车)。
电动汽车作为一种工业产品,以电池为主要能量源,动力源全部或部分由电动机提供,涉及机械、电力电子、通信、嵌入式控制等多个学科领域。
电动汽车与传统汽车相比,能量源、驱动系统结构都发生了极大的改变。
根据驱动系统结构布置的不同,电动汽车可分为两种:单电机集中驱动型式电动汽车(简称集中驱动式电动汽车)和多电机分布驱动型式电动汽车(简称分布式驱动电动汽车)。
1、传统集中式驱动结构类型集中驱动式电动汽车与传统内燃机汽车的驱动结构布置方式相似,用电动机及相关部件替换内燃机,通过变速器、减速器等机械传动装置,将电动机输出力矩,传递到左右车轮驱动汽车行驶。
集中驱动式电动汽车操作实现技术成熟、安全可靠,但存在体积较重,效率相对不高等不足。
随着纯电动汽车技术研究的深入,纯电动汽车的驱动系统的布置结构也逐渐由单一动力源的集中式驱动系统向多动力源的分布式驱动系统发展。
图1.1为电动汽车不同驱动系统的结构示意图。
图1.1(a)为单电动机集中驱动型式,由电动机、减速器和差速器等构成,由于没有离合器和变速器,可以减少传动装置的体积及质量。
图1.1(b)也为单集中驱动型式,与发动机横向前置前驱的内燃机汽车结构布置方式相似,将电动机、减速器和差速器集成一体,通过左右半轴分别驱动两侧车轮,该布置型式结构紧凑,多用于小型电动汽车上。
图1.1(c)为双电机分布驱动型式,两个驱动电机通过减速器分别驱动左右两侧车轮,可通过电子差速控制实现转向行驶,以取代机械差速器,该驱动方式为目前研究的热点。
图1.1(d)为轮毂电机分布式驱动型式,电动机和固定速比的行星齿轮减速器安装在车轮里面,省去传动轴和差速器,从而使传动系统得到简化。
该驱动方式对驱动电机的要求较高,同时控制算法也比较复杂。
2、分布式驱动电动汽车结构类型分布式驱动电动汽车按照动力系统的组织构型不同可分为两种:电机与减速器组合驱动型式,轮边电机或轮毂电机驱动型式。
大众01M型自动变速器拆装台架的设计职业技术教育学院汽车维修工程教育沈维东(06520140)指导老师:董颖(副教授)摘要:变速器作为汽车动力传动系统的重要组成部分,对汽车的动力性、驾驶舒适性及油耗都具有重要的作用。
自动变速器运用计算机和电子控制技术实现汽车的自动变速,降低驾驶者的劳动强度,提高行车的安全性。
大众公司生产的01M型自动变速器采用计算机“模糊逻辑”控制技术,机械结构先进,采用横置安装,具有4个前进档,主要由液力元件、控制机构、变速机构、主传动机构、壳体及相关部件组成,性能优良,用于捷达都市先锋(5V机)和捷达海风之旅(2V机),原装帕萨特轿车也装有01M型自动变速器。
关键词:大众01M自动变速器;结构组成;工作原理;拆装工艺;台架;设计Removable mass 01M AutomaticTransmission Design benchName:Weidong Shen Director:Ying Dong (Dept.of Science &Engineering,Zhejiang Normal University ,993 No.29) Abstract:Transmission as the automotive power train of an important part of the car's power, driving comfort and fuel economy have an important role. Automatic transmission use of computers and electronic control technology to achieve the car automatic transmission, decrease the driver's labor intensity and improve traffic safety.V olkswagen Automatic Transmission 01M produced by computer "fuzzy logic" control technology, advanced mechanical structure, using tap installation, with four forward gears, mainly by the hydraulic components, control mechanism, speed change mechanism, the main transmission mechanism, the shell and composition of associated components, excellent performance, for Jetta City Pioneer (5V machine) and Jie Dahai Wind Tour (2V machine), original Passat sedan equipped with 01M Automatic Transmission.Key Words:Mass 01M automatic transmission; structural composition; working principle; disassembly process; bench; design1 引言变速器做为传动系统的心脏,主要任务是传递动力,改变汽车的传动比,扩大驱动车轮转矩和转速的范围,使车辆适应各种变化的行驶工况,同时使发动机在理想的工况下工作;在发动机转矩方向不变的前提下,实现汽车的倒退行驶;实现空挡,中断发动机传递给车轮的动力,使发动机能够起动、怠速。
一种电动车辆技术领域的电动车辆无级变速驱动系统、变速控制系统及方法,包括:第一驱动电机、行星轮系、第二驱动电机和第三输出机构,其中,行星轮系设有齿圈、行星支架、太阳轮和若干行星齿轮,行星齿轮周向均布在行星支架上,行星支架和齿圈之一与第二驱动电机的输出轴啮合、另一与第三输出机构啮合,齿圈与行星齿轮啮合,太阳轮与第一驱动电机输出端连接并与行星齿轮啮合。
本技术采用行星减速机构,通过第二驱动电机带动行星支架或者齿圈的转动达到所需要的减速比,完成电动车的无级变速,实现换挡自动化。
技术要求1.一种电动车辆无级变速驱动系统,其特征在于,包括:第一驱动电机、行星轮系、第二驱动电机和第三输出机构,其中:行星轮系设有齿圈、行星支架、太阳轮和若干行星齿轮,行星齿轮周向均布在行星支架上,行星支架和齿圈之一与第二驱动电机的输出轴啮合、另一与第三输出机构啮合,齿圈与行星齿轮啮合,太阳轮与第一驱动电机输出端连接并与行星齿轮啮合。
2.根据权利要求1所述的电动车辆无级变速驱动系统,其特征是,所述的齿圈、行星支架和太阳轮均套设在主轴上。
3.根据权利要求1所述的电动车辆无级变速驱动系统,其特征是,所述第三输出机构设有轮轴,所述的轮轴与电动车辆的驱动轴固定连接。
4.根据权利要求2所述的电动车辆无级变速驱动系统,其特征是,所述的第一驱动电机包括转子总成和绕线定子,其中,转子总成设有转子内衬套,转子内衬套一端固定有太阳轮。
5.根据权利要求2所述的电动车辆无级变速驱动系统,其特征是,所述第一驱动电机的输出端与太阳轮通过减速机构相连,所述的减速机构为皮带、链条、齿轮传动机构中任意一种。
6.一种应用于上述任一权利要求所述电动车辆无级变速驱动系统的变速控制系统,其特征在于,包括:行车电脑、制动传感器、变速传感器、第一驱动电机控制单元、第二驱动电机控制单元、第一转速传感器和第二转速传感器,其中,制动传感器与行车电脑相连并输出制动信号;变速传感器与行车电脑相连并输出加速信号或减速信号;行车电脑与第一驱动电机控制单元、第二驱动电机控制单元相连并传输两驱动电机的控制信息;第一转速传感器与行车电脑相连并输出第一驱动电机转速信息;第二转速传感器与行车电脑相连并输出第二驱动电机转速信息。
7.根据权利要求6所述电动车辆无级变速驱动系统的变速控制系统,其特征在于,所述的变速控制系统还包括:第一电流传感器、第二电流传感器、第一电压传感器、第二电压传感器、第一扭矩传感器和第二扭矩传感器,其中,第一扭矩传感器与行车电脑相连并输出第一驱动电机扭矩信息;第二扭矩传感器与行车电脑相连并输出第二驱动电机扭矩信息;第一电流传感器、第一电压传感器与第一驱动电机控制单元相连并分别输出第一驱动电机的输入电流和输入电压信息;第二电流传感器、第二电压传感器与第二驱动电机控制单元相连并分别输出第二驱动电机的输入电流和输入电压信息。
8.一种基于权利要求6或7所述变速控制系统的电动车辆变速控制方法,其特征在于,包括以下步骤:S1,首先判断输入信号是否为制动信号,若为制动信号,则第一驱动电机和第二驱动电机停转,电动车辆停车,否则判断为变速信号;S2,接着判断变速信号是否为加速信号,若为加速信号,再判断第一驱动电机电流是否小于设定值,若小于设定值则进一步判断第一驱动电机效率是否大于设定值,否则第一驱动电机限流后判断第一驱动电机效率大小;若判断变速信号为减速信号,接着判断第一驱动电机电流是否小于设定值,若小于设定值则进一步判断第一驱动电机效率是否大于设定值,否则第一驱动电机限流后判断第一驱动电机效率的大小;S3,根据步骤S2的判断结果:在变速信号为加速信号的情况下,若第一驱动电机效率大于设定值,则第一驱动电机加速,接着判断整车速度与目标速度的大小,若整车速度与目标速度相等则保持当前行车速度,若整车速度大于目标速度则刹车减速,若整车速度小于目标速度则返回步骤S2;若第一驱动电机效率等于设定值,则判断第二驱动电机电流是否小于设定值;若第一驱动电机效率小于设定值,则第一驱动电机限流后判断第二驱动电机电流是否小于设定值;在变速信号为减速信号的情况下,若第一驱动电机效率大于设定值,则第一驱动电机减速,接着判断整车速度与目标速度的大小,若整车速度与目标速度相等则保持当前行车速度,若整车速度大于目标速度则刹车减速,若整车速度小于目标速度则返回步骤S2;若第一驱动电机效率等于设定值,则判断第二驱动电机电流是否小于设定值;若第一驱动电机效率小于设定值,则第一驱动电机限流后判断第二驱动电机电流是否小于设定值;S4,根据步骤S3的判断结果:在变速信号为加速信号的情况下,若第二驱动电机电流不小于设定值,则第二驱动电机限流保护后判断第二驱动电机效率是否大于设定值,否则直接判断第二驱动电机效率是否大于设定值;若第二驱动电机效率大于设定值,则第二驱动电机加速,之后判断整车速度与目标速度的大小;若第二驱动电机效率等于设定值,则保持当前行车速度;若第二驱动电机效率小于设定值,则第二驱动电机限流至第二驱动电机效率等于设定值后保持当前行车速度;在变速信号为减速信号的情况下,若第二驱动电机电流不小于设定值,则第二驱动电机限流保护后判断第二驱动电机效率是否大于设定值,否则直接判断第二驱动电机效率是否大于设定值;若第二驱动电机效率大于设定值,则第二驱动电机减速,之后判断整车速度与目标速度的大小;若第二驱动电机效率等于设定值,则保持当前行车速度;若第二驱动电机效率小于设定值,则第二驱动电机限流至第二驱动电机效率等于设定值后保持当前行车速度;S5,根据步骤S4,在变速信号为减速信号的情况下,第二驱动电机减速后,若整车速度不大于目标速度,则刹车减速,否则比较N1与N2的大小;S6,根据步骤S5,若N1小于N2,则停车,否则返回步骤S4判断整车速度与目标速度的大小;所述N1为第一驱动电机经行星轮系输出后对应的电动车辆输出轴的转速大小,所述N2为第二驱动电机经行星轮系输出后对应的电动车辆输出轴的转速大小。
技术说明书电动车辆无级变速驱动系统、变速控制系统及方法技术领域本技术涉及的是一种电动车辆领域的技术,具体是一种电动车辆无级变速驱动系统、变速控制系统及方法。
背景技术市场上现有的电动车辆绝大部分采用固定速比的减速器,没有变速机构。
固定速比减速器仅有一个挡位,让电机常处在低效率区域,既浪费宝贵电池能量,又提高了对牵引电机的要求,进一步减少车辆续驶里程。
虽然一些高端品牌电动车辆采用了变速机构,但主要都是固定挡位的手动变速器,较少采用无级变速器。
手动变速器通过齿轮组的配合,机构复杂,且手动换挡时动力输出会中断。
而无级变速器采用传动带和可变槽宽的棘轮进行动力传递,即当棘轮变化槽宽时,相应改变驱动轮与从动轮上传动带的接触半径进行变速,传动带一般用橡胶带、金属带和金属链等,但是传动带很容易损坏,不能承受较大的载荷。
此外应用于电动车辆变速器上的手动变速器和无级变速器体积大、重量重、制造成本高,维护复杂,推高了电动车辆的价格,约束了电动车辆的普及。
技术内容本技术针对现有技术存在的上述不足,提出了一种电动车辆无级变速驱动系统、变速控制系统及方法,能够通过带动行星支架或者齿圈的转动达到所需要的减速比,完成电动车的无级变速,实现换挡自动化。
本技术是通过以下技术方案实现的:本技术包括:第一驱动电机、行星轮系、第二驱动电机和第三输出机构,其中:行星轮系设有齿圈、行星支架、太阳轮和若干行星齿轮,行星齿轮周向均布在行星支架上,行星支架和齿圈之一与第二驱动电机的输出轴啮合、另一与第三输出机构啮合,齿圈与行星齿轮啮合,太阳轮与第一驱动电机输出端连接并与行星齿轮啮合作为动力主输入端。
所述的齿圈、行星支架和太阳轮均套设在主轴上。
所述第三输出机构设有轮轴,所述的轮轴与电动车辆的驱动轴采用花键或联轴器固定连接。
所述的第一驱动电机包括转子总成和绕线定子,其中,转子总成设有转子内衬套,优选地,转子内衬套一端固定有太阳轮。
优选地,所述第一驱动电机的输出端与太阳轮通过减速机构相连,所述的减速机构为皮带、链条、齿轮传动机构中任意一种。
一种应用于上述电动车辆无级变速驱动系统的变速控制系统,包括:行车电脑、制动传感器、变速传感器、第一驱动电机控制单元、第二驱动电机控制单元、第一转速传感器和第二转速传感器,其中,制动传感器与行车电脑相连并输出制动信号;变速传感器与行车电脑相连并输出加速信号或减速信号;行车电脑与第一驱动电机控制单元、第二驱动电机控制单元相连并传输两驱动电机的控制信息;第一转速传感器与行车电脑相连并输出第一驱动电机转速信息;第二转速传感器与行车电脑相连并输出第二驱动电机转速信息。
所述电动车辆无级变速驱动系统的变速控制系统还包括:第一电流传感器、第二电流传感器、第一电压传感器、第二电压传感器、第一扭矩传感器和第二扭矩传感器,其中,第一扭矩传感器与行车电脑相连并输出第一驱动电机扭矩信息;第二扭矩传感器与行车电脑相连并输出第二驱动电机扭矩信息;第一电流传感器、第一电压传感器与第一驱动电机控制单元相连并分别输出第一驱动电机的输入电流和输入电压信息;第二电流传感器、第二电压传感器与第二驱动电机控制单元相连并分别输出第二驱动电机的输入电流和输入电压信息。
一种基于上述变速控制系统的电动车辆变速控制方法,包括以下步骤:S1,首先判断输入信号是否为制动信号,若为制动信号,则第一驱动电机和第二驱动电机停转,电动车辆停车,否则判断为变速信号;S2,接着判断变速信号是否为加速信号,若为加速信号,再判断第一驱动电机电流是否小于设定值,若小于设定值则进一步判断第一驱动电机效率是否大于设定值,否则第一驱动电机限流后判断第一驱动电机效率大小;若判断变速信号为减速信号,接着判断第一驱动电机电流是否小于设定值,若小于设定值则进一步判断第一驱动电机效率是否大于设定值,否则第一驱动电机限流后判断第一驱动电机效率的大小;S3,根据步骤S2的判断结果:在变速信号为加速信号的情况下,若第一驱动电机效率大于设定值,则第一驱动电机加速,接着判断整车速度与目标速度的大小,若整车速度与目标速度相等则保持当前行车速度,若整车速度大于目标速度则刹车减速,若整车速度小于目标速度则返回步骤S2;若第一驱动电机效率等于设定值,则判断第二驱动电机电流是否小于设定值;若第一驱动电机效率小于设定值,则第一驱动电机限流后判断第二驱动电机电流是否小于设定值;在变速信号为减速信号的情况下,若第一驱动电机效率大于设定值,则第一驱动电机减速,接着判断整车速度与目标速度的大小,若整车速度与目标速度相等则保持当前行车速度,若整车速度大于目标速度则刹车减速,若整车速度小于目标速度则返回步骤S2;若第一驱动电机效率等于设定值,则判断第二驱动电机电流是否小于设定值;若第一驱动电机效率小于设定值,则第一驱动电机限流后判断第二驱动电机电流是否小于设定值;S4,根据步骤S3的判断结果:在变速信号为加速信号的情况下,若第二驱动电机电流不小于设定值,则第二驱动电机限流保护后判断第二驱动电机效率是否大于设定值,否则直接判断第二驱动电机效率是否大于设定值;若第二驱动电机效率大于设定值,则第二驱动电机加速,之后判断整车速度与目标速度的大小;若第二驱动电机效率等于设定值,则保持当前行车速度;若第二驱动电机效率小于设定值,则第二驱动电机限流至第二驱动电机效率等于设定值后保持当前行车速度;在变速信号为减速信号的情况下,若第二驱动电机电流不小于设定值,则第二驱动电机限流保护后判断第二驱动电机效率是否大于设定值,否则直接判断第二驱动电机效率是否大于设定值;若第二驱动电机效率大于设定值,则第二驱动电机减速,之后判断整车速度与目标速度的大小;若第二驱动电机效率等于设定值,则保持当前行车速度;若第二驱动电机效率小于设定值,则第二驱动电机限流至第二驱动电机效率等于设定值后保持当前行车速度;S5,根据步骤S4,在变速信号为减速信号的情况下,第二驱动电机减速后,若整车速度不大于目标速度,则刹车减速,否则比较N1与N2的大小;S6,根据步骤S5,若N1小于N2,则停车,否则返回步骤S4判断整车速度与目标速度的大小。