平衡车平衡原理 Arduino 库函数
- 格式:pdf
- 大小:458.13 KB
- 文档页数:22
平衡车的原理是什么?
随着环保意识的提升,电动车的数量急剧上升。
两轮电动平衡车的问世,让人眼前一亮。
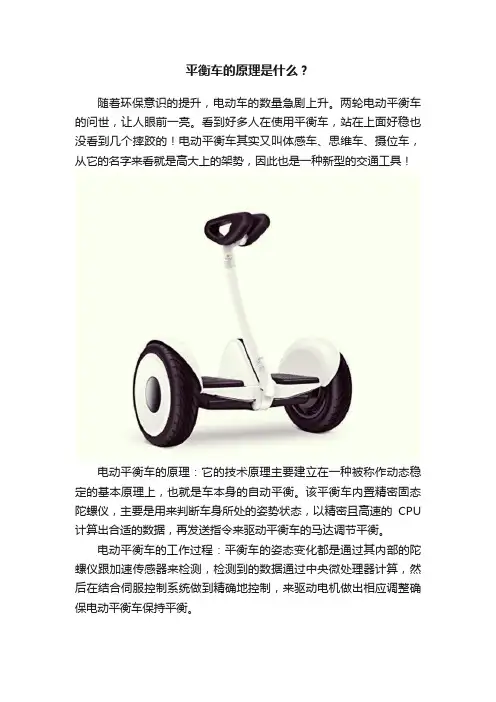
看到好多人在使用平衡车,站在上面好稳也没看到几个摔跤的!电动平衡车其实又叫体感车、思维车、摄位车,从它的名字来看就是高大上的架势,因此也是一种新型的交通工具!
电动平衡车的原理:它的技术原理主要建立在一种被称作动态稳定的基本原理上,也就是车本身的自动平衡。
该平衡车内置精密固态陀螺仪,主要是用来判断车身所处的姿势状态,以精密且高速的CPU 计算出合适的数据,再发送指令来驱动平衡车的马达调节平衡。
电动平衡车的工作过程:平衡车的姿态变化都是通过其内部的陀螺仪跟加速传感器来检测,检测到的数据通过中央微处理器计算,然后在结合伺服控制系统做到精确地控制,来驱动电机做出相应调整确保电动平衡车保持平衡。
别看平衡车只有两个轱辘,其优点还真不少!
电动平衡车第一优点,绿色环保符合环保理念
其次就是看到它的拐弯半径小,因此适合用于小空间范围。
用过或看到别人使用过,没有看见谁刹车的吧?因此电动平衡车是没有刹车系统的!
最后就是它的控制很便捷,站在上面只要身体前后倾斜那么就能改变其两轱辘电动平衡车的前进后退和它的运行速度,相比传统的车子灵活且局限性小。
这种车子虽然在日常生活中还不算普及,但在一些特殊行业使用的越来越多。
记得在15年博尔特在鸟巢举办的世界田径锦标赛男子200m决赛中,博尔特庆祝时被踏着两轮平衡车的摄像大哥撞倒,估计摄像大哥当时吓出一身冷汗,毕竟博尔特的腿那是相当值钱的!。
两轮自平衡小车类似一个倒立摆系统,是一个非线性不稳定系统,采用陀螺仪和加速度计传感器模块来采集角加速度和角度数据,以此获得车体当前姿态。
当前,两轮自平衡小车系统硬件多数以MPU6050模块实时获取小车姿态,运用卡尔曼滤波算法滤除掉传感器带来的噪声,通过电机的正反转来实现小车自平衡[1-2]。
两轮自平衡小车具有小巧、运动灵活等特点,在众多搬运机器人中占有一定的优势[3-4]。
以往,我们在调试小车控制系统时,通常根据经验和反复试验得到较好的实验效果,因传感器采集到车辆的准确信息没有实现可视化,此方法存在开发周期长、难度大等缺陷。
基于此,本文提出通过蓝牙通信的方式,将小车的运行信息传送至采用LabView开发的上位机界面,对小车运行数据进行实时监控,为控制算法的开发提供了科学的调试依据,给算法的调试指明了方向,从而有效缩短算法的调试时间。
1 系统总体结构设计本系统由Arduino两轮自平衡小车和LabView上位机两部分组成[5-6]。
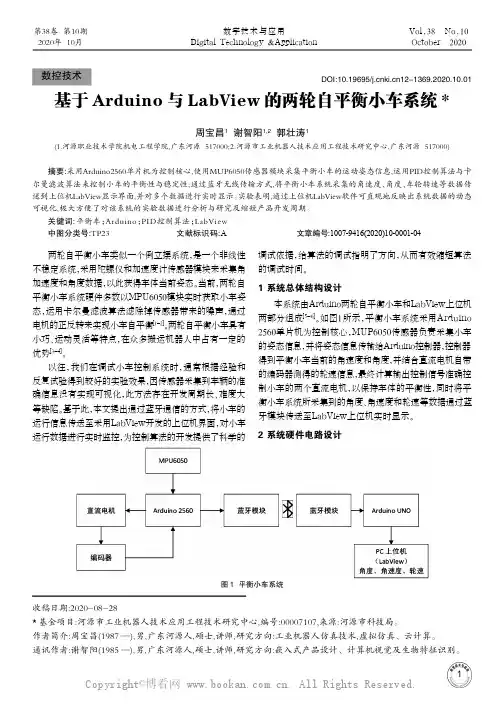
如图1所示,平衡小车系统采用Arduino 2560单片机为控制核心,MUP6050传感器负责采集小车的姿态信息,并将姿态信息传输给Arduino控制器,控制器得到平衡小车当前的角速度和角度,并结合直流电机自带的编码器测得的轮速信息,最终计算输出控制信号准确控制小车的两个直流电机,以保持车体的平衡性,同时将平衡小车系统所采集到的角度、角速度和轮速等数据通过蓝牙模块传送至LabView上位机实时显示。
2 系统硬件电路设计收稿日期:2020-08-28*基金项目:河源市工业机器人技术应用工程技术研究中心,编号:00007107,来源:河源市科技局。
作者简介:周宝昌(1987—),男,广东河源人,硕士,讲师,研究方向:工业机器人仿真技术,虚拟仿真、云计算。
通讯作者:谢智阳(1985—),男,广东河源人,硕士,讲师,研究方向:嵌入式产品设计、计算机视觉及生物特征识别。
基于Arduino 与LabView 的两轮自平衡小车系统*周宝昌1 谢智阳1,2 郭壮涛1(1.河源职业技术学院机电工程学院,广东河源 517000;2.河源市工业机器人技术应用工程技术研究中心,广东河源 517000)摘要:采用Arduino2560单片机为控制核心,使用MUP6050传感器模块采集平衡小车的运动姿态信息,运用PID控制算法与卡尔曼滤波算法来控制小车的平衡性与稳定性;通过蓝牙无线传输方式,将平衡小车系统采集的角速度、角度、车轮转速等数据传送到上位机LabView显示界面,并对多个数据进行实时显示。
平衡车是什么原理
平衡车是一种电动交通工具,也被称为电动平衡车或自平衡电动车。
它能够在没有人工操作的情况下保持平衡,并根据用户的身体倾斜来前后移动。
平衡车的工作原理基于陀螺仪和加速度计的技术。
陀螺仪与加速度计都是通过测量车身的倾斜角度和加速度来控制平衡车的平衡和运动方向。
陀螺仪感知车身的旋转信息,而加速度计则感知加速度和倾斜角度。
平衡车的中央处理器会实时接收陀螺仪和加速度计的数据,并根据数据进行计算和分析。
当用户身体向前倾斜时,平衡车会加快自身的前进速度,反之亦然。
当用户身体向左或向右倾斜时,平衡车会相应地转弯。
平衡车的电动机会根据处理器的指令来提供足够的动力,以保持平衡和进行移动。
此外,平衡车还配备了一些辅助设备,如电机驱动系统、电磁制动系统和电池管理系统。
电机驱动系统控制电机的转动速度,以实现平衡和前进或后退。
电磁制动系统则负责制动平衡车,使其停下或减速。
电池管理系统用于监测电池的电量,并提供电量不足时的警告。
总之,平衡车通过陀螺仪和加速度计感知用户身体的倾斜角度和加速度,然后通过中央处理器的计算和指令控制电机驱动系统,使得车辆能够实现平衡和移动。
这种自平衡的工作原理使得平衡车成为一种便捷的个人出行工具。

第35卷 第4期 福 建 电 脑 Vol. 35 No.42019年4月Journal of Fujian ComputerApr. 2019———————————————化天怡,女,1998年生,本科在读,主要研究领域为电子信息工程。
E-mail: hty7777777@.。
沈航涛,男,1997年生,本科在读,主要研究领域为建筑电气与智能化、电子信息工程。
E-mail: 1209503277@ 。
田尧,男,1998年生,本科在读,主要研究领域为电气工程及其自动化、电子信息工程。
E-mail: 1612359304@ 。
基于Arduino 的平衡台系统化天怡 沈航涛 田尧(同济大学浙江学院电子与信息工程系 浙江 嘉兴 314051)摘 要 本文介绍的装置以Arduino 为核心部件,电阻式触摸屏作为位置传感器获取小球位置信息,将数据传输到Arduino进行串级PID 算法处理,再把处理好的调整数据传给舵机控制模块,舵机进行相应的转动动作,带动平衡台的运动,最终实现小球在平衡台上的平衡。
关键词Arduino ;电阻屏;舵机控制模块中图法分类号TP21 DOI:10.16707/ki.fjpc.2019.04.036Balance Platform System Based on ArduinoHUA Tianyi, SHEN Hangtao, TIAN Yao(Department of electronics and Information Engineering, Tongji Zhejiang College, Jiaxing, China, 314051)1引言板球系统是杆球系统的二维扩展[1],是研究无约束运动体路径规划和轨迹控制的典型二自由度平台的对象,可用于对经典控制理论和现代控制理论的科研工作[2]。
其实验内容还涉及到对物体位置的检测、预测、跟踪以及定位等多项技术;其研究结果可应用于工业自动化、船舶工程等多个领域,具有较高的研究和使用价值。
平衡车电机原理
平衡车电机原理是通过电磁感应产生力矩来实现车辆的平衡和前进。
平衡车电机采用直流无刷电机(BLDC)或直流有刷电机(DC)作为动力源。
在电机内,有一个稳定的磁场由永磁体产生。
当电流施加在电机的线圈中时,会产生一个磁场。
根据洛伦兹力原理,当有电流流过线圈时,线圈会受到磁场力的作用而运动。
平衡车电机采用闭环控制系统,通过内置的加速度计或陀螺仪感知车辆的倾斜角度和角速度。
当车辆倾斜时,控制系统会根据倾斜的方向和角度调整电机的转速和转向,以产生一个反向力矩来抬升车辆并保持平衡。
具体来说,当车辆向前倾斜时,控制系统会增加电机的转速,使车辆向前移动,以恢复平衡。
相反,当车辆向后倾斜时,控制系统会减小电机的转速,产生一个向后的力矩,将车辆移动到平衡位置。
平衡车电机的转向也是通过调整电机的转速来实现的。
例如,如果车辆需要向左转,控制系统会使右侧电机的转速大于左侧电机的转速,从而产生一个向左的力矩,使车辆转向。
总结起来,平衡车电机原理是通过电磁感应和闭环控制系统,根据车辆的倾斜角度和角速度来调整电机的转速和转向,以实现车辆的平衡和运动。
平衡车的原理
平衡车的原理即是依靠陀螺效应来保持平衡。
陀螺效应是指当一个陀螺在转动时,由于转动惯量的作用,陀螺会抵抗外部力的影响而保持平衡。
平衡车内部配备了陀螺仪和加速度传感器。
陀螺仪通过检测车体的倾斜角度,以及角速度的变化,来判断车体是否处于平衡状态。
加速度传感器则用于检测车体的加速度,并根据检测到的结果对车体进行控制。
当乘客乘坐平衡车时,车体会根据乘客的重心位置来判断车体是否处于平衡状态。
如果乘客稍微偏向前方,车体会通过电机系统自动调整车轮的转速,使车体向后倾斜,将乘客的重心位置拉回到平衡点上。
这种自平衡的调整是通过车轮上的电机来完成的。
电机会根据陀螺仪和加速度传感器的反馈信息,实时调整车轮的转速,从而使车体保持平衡状态。
此外,平衡车还配备了一些安全机制,例如过载保护和防倾翻控制。
过载保护能够限制车体的最大倾斜角度,以防止乘客摔倒或发生意外。
防倾翻控制则能够监测车体的倾斜状态,并及时采取措施,避免车体发生翻倒。
总之,平衡车通过利用陀螺效应和相关的传感器技术,能够实现自动调整车体姿态,保持平衡状态,并提供安全的乘坐体验。
平衡车的工作原理
平衡车的工作原理是通过操控电机和陀螺仪的相互作用来实现的。
平衡车由一个或多个电机驱动,电机通过控制轮子的转动来推动车辆前进或转向。
同时,车辆上还安装有一个陀螺仪,用于测量车辆的倾斜角度。
当平衡车保持平衡时,陀螺仪会测量到车辆的倾斜角度为0,此时控制系统不会发生任何调整。
当车辆稍微倾斜时,陀螺仪会感知到倾斜的角度,并将这个信息传递给控制系统。
控制系统根据陀螺仪的信号来判断平衡车的倾斜方向和角度,并通过调整电机的转速来使车辆重新保持平衡。
如果车辆向前倾斜,控制系统会加大后轮电机的转速,使车辆向后移动。
如果车辆向后倾斜,控制系统会加大前轮电机的转速,使车辆向前移动。
通过不断调整电机的转速,平衡车就能够在保持平衡的状态下前进或转向。
此外,平衡车还配备了一些传感器和控制算法,用于监测和处理其他因素对平衡车运动状态的影响,如地势的变化、用户的控制指令等。
这些传感器和算法能够实现对平衡车的实时监控和智能化控制,提供更稳定和安全的骑行体验。
单片机平衡车原理
单片机平衡车原理是利用PID控制算法实现的。
PID控制算法是根据系统的误差信号来调整控制量,使系统的输出能够快速、稳定地达到期望值。
首先,单片机平衡车使用加速度传感器和陀螺仪来检测车身的倾斜角度和角速度。
根据这些数据,通过滤波算法对信号进行处理,得到准确和稳定的输入。
接下来,使用PID控制算法对单片机平衡车进行控制。
PID控制算法由比例(P)、积分(I)和微分(D)三个部分组成。
比例控制根据系统当前的误差信号来调整控制量。
积分控制根据系统历史误差信号的累积值来进行调整,用于消除系统的稳态误差。
微分控制根据系统误差的变化速度来进行调整,防止系统过冲。
PID控制算法根据加速度传感器和陀螺仪检测到的车身倾斜角
度和角速度与期望值之间的差距,计算出相应的控制量。
该控制量通过电机驱动单片机平衡车的轮子,使车身保持平衡。
同时,为了提高平衡车的稳定性,还可以使用模糊控制算法。
模糊控制算法结合了人类的模糊逻辑思维,使用一组模糊规则来调整输出控制量。
通过对倾斜角度和角速度进行模糊化处理,根据一系列模糊规则计算出平衡控制量,从而进一步提高平衡车的性能。
总之,单片机平衡车通过加速度传感器、陀螺仪和PID控制
算法实现了车身的平衡控制。
这种控制方法可以精确地控制电机输出,使平衡车能够稳定地保持直立状态。
平衡车的工作原理
平衡车,也被称为电动平衡车、自平衡车,是一种新型个人电动交通工具,其工作原理可分为电机控制系统、陀螺仪、倾角检测和数据处理系统四个部分。
1. 电机控制系统
- 平衡车采用双轮设计,每个轮子由一个电机驱动。
- 电机控制系统通过调节两个电机的转速来实现平衡车的前后移动和转向。
- 通常采用无刷直流电机,可提供足够的动力和高效率。
2. 陀螺仪
- 陀螺仪是平衡车实现自平衡的重要组成部分,通过感应重力加速度和角速度实现动态控制。
- 在平衡车上安装的陀螺仪感受到倾斜角度,将这些数据传输给倾角检测系统。
3. 倾角检测
- 倾角检测系统主要由加速度传感器和角速度传感器组成。
- 加速度传感器用于检测平衡车倾斜的重力方向;角速度传感器用于检测平衡车的转动速度。
- 这些传感器将倾斜角度和角速度通过数据线传输给数据处理系统。
4. 数据处理系统
- 数据处理系统是平衡车的大脑,它接收倾角检测系统传输的数据,进行实时分析和处理。
- 数据处理系统根据倾角传感器的数据,通过算法计算出平衡车要达到的倾斜角度,并将结果传输给电机控制系统。
- 数据处理系统还负责将用户对平衡车的指令转换为相应的控制信号,通过控制电机的转速来实现平衡车的前后移动和转向。
总结:
平衡车的工作原理可以概括为电机控制系统根据数据处理系统计算出的倾斜角度,通过调节电机的转速来实现平衡车的前后移动和转向。
陀螺仪和倾角检测系统负责感应倾斜角度和角速度,并将这些数据传输给数据处理系统进行分析和处理。
通过这个工作原理,平衡车能够实现自平衡,并能够根据用户的指令进行控制。
一、基本原理[url=][/url] 本项目机器人是一辆简易型的双轮自主平衡小车,通过一个简单的机械式传感器获取小车的姿态,并通过调节小车前后运动方向,使得小车依靠两轮也能保持一个直立平衡。 1、运动机理[url=][/url] 双轮小车的自主平衡原理,其实就是不断的通过改变小车前后运动的方向,使小车的车身在竖直方向上保持一个动态的直立平衡。就类似杂技演员表演独轮车一样,需要不断的前后踩脚踏板使小车在前进和后退间不断变换,以保持一个平衡。 这个具体的平衡原理如下: 1、双轮自平衡小车一般长得都比较“高”,也就是重心位置比较高,位于车身底部的两个车轮是平行安装的,默认静止状态小车是无法保持一个直立的状态的。 2、如果车轮带动小车前进,小车下半身会比上半身先获得前进的加速度,即启动的瞬间小车的下半身前进而上半身静止,则会出现小车趋向后仰的状态。就类似汽车突然加速,我们身体会感到一个后仰的趋势。 3、如果车轮带动小车后退,小车下半身会比上半身先获得后退的加速度,即启动的瞬间小车的下半身后退而上半身静止,则会出现小车趋向前倾的状态。就类似汽车突然刹车(后退),我们身体会有一个前倾的趋势。 4、由于小车重心较高,如果小车前进--后仰,或者小车后退--前倾,随着小车的继续运动,这个后仰或者前倾的趋势会越来越大,必须及时纠正,否则小车就会倾倒下去。 5、如果小车前进中,有了后仰的趋势,达到一定程度后,可以让小车变成后退,让小车后退产生的前倾趋势去纠正原来前进时后仰的趋势;如果小车后退中,有了前倾的趋势,达到一定程度后,让小车变成前进,让小车前进产生的后仰趋势去纠正原来后退时前倾的趋势。如此往复循环,使小车保持一个直立的动态平衡状态。
[/url] 2、控制原理[url=][/url] 根据以上平衡原理,我们的双轮自平衡小车的具体运动控制过程如下: 1、车身后仰,则让小车后退,车身恢复直立;
平衡车是什么原理
平衡车是一种新型的个人代步工具,它利用了动力学和电子技术,通过人体的
重心变化来控制前后左右的平衡,从而实现前进、后退、转弯等动作。
它的原理主要基于两个方面,动力学平衡和电子控制系统。
首先,动力学平衡原理是平衡车实现前进、后退和转弯的基础。
平衡车内部配
备了一套先进的陀螺仪和加速度传感器,这些传感器能够实时感知车身的倾斜角度和加速度,从而及时调整电机的输出力,保持车辆的平衡状态。
当骑手向前倾斜时,车辆会感知到这一变化,电机会自动增加功率,推动车辆向前运动;当骑手向后倾斜时,电机则会减少功率,使车辆减速或者后退。
在转弯时,平衡车会根据骑手的身体倾斜方向,自动调整左右两个车轮的转速,实现平稳的转向动作。
其次,电子控制系统是平衡车实现平衡和动作控制的关键。
平衡车内部配备了
一套先进的电子控制系统,包括主控芯片、电池管理系统、电机驱动器等。
主控芯片是平衡车的大脑,它通过实时分析传感器的数据,计算出车辆的倾斜角度和加速度,然后控制电机的输出力,使车辆保持平衡状态。
电池管理系统负责监控和管理电池的电量和充放电过程,保证车辆的稳定供电。
电机驱动器则负责根据主控芯片的指令,控制电机的转速和输出功率,实现车辆的前进、后退和转向。
总的来说,平衡车的原理是基于动力学平衡和电子控制系统的相互配合。
通过
感知骑手的身体倾斜动作,实时调整电机的输出力,保持车辆的平衡状态,从而实现前进、后退和转向等动作。
这种先进的技术原理使得平衡车成为一种便捷、环保的个人代步工具,受到了越来越多人的喜爱和青睐。
两轮平衡车原理
平衡车是一种基于动态稳定原理的个人代步工具,能够保持垂直方向的平衡状态并进行前后移动。
其工作原理主要包括两个方面,即倾角检测与动力控制。
1. 倾角检测:平衡车内置了一种倾角传感器,通常为陀螺仪或加速度计。
这些传感器能够感知平衡车倾斜的角度,并将倾斜角度的信息传输给控制系统。
2. 动力控制:平衡车根据倾斜角度的信息,通过内置的控制系统来实现动力控制。
控制系统可以分为三个主要组件:计算器、电机和电池。
- 计算器:计算器是平衡车控制系统的核心,它接收倾斜角
度传感器的信息,并进行实时计算和分析。
根据计算结果,计算器会发送指令给电机进行相应的调整。
- 电机:平衡车通常配备两个电机,分别安装在车轮上。
电
机可以根据计算器的指令来实现动力调整,以保持平衡状态。
当平衡车倾斜时,电机会自动调整转速,使车身回到平衡状态。
- 电池:平衡车使用电池作为动力源,通过供给电机所需的
电力来推动车轮。
电池的电能可以通过外部电源进行充电。
在平衡车的操作过程中,倾角检测和动力控制不断地进行反馈循环,使得平衡车能够自动调整车身姿态,达到平衡状态。
当用户倾斜身体或调整重心时,倾角传感器会检测到角度变化,
并将这个信息传输给计算器。
计算器会根据倾角传感器的数据来判断是否需要对电机进行调整,以使平衡车保持稳定。
总的来说,两轮平衡车利用倾角检测和动力控制的原理,实现了自动平衡功能。
这使得人们能够轻松地操纵平衡车进行代步或娱乐。
平衡车的工作原理平衡车是一种以自平衡为特点的个人交通工具,随着城市交通拥堵问题的日益突出,平衡车逐渐成为人们出行的新选择。
那么,平衡车是如何实现自平衡的呢?本文将介绍平衡车的工作原理,并深入探讨其自平衡的机制。
一、平衡车的基本组成和工作原理平衡车由车身、电机、电池、陀螺仪和加速度传感器等组件构成,它们共同协作完成平衡车的运行。
具体来说,平衡车通过感知车身姿态的变化,然后控制电机的转速和方向来实现自平衡效果。
1. 陀螺仪的作用陀螺仪是平衡车的核心感应装置,它能够感知平衡车的角度和方向变化。
当平衡车倾斜时,陀螺仪会感应到这一变化,并根据倾斜的方向和角度向控制系统发送信号。
2. 加速度传感器的作用加速度传感器主要用于检测平衡车的加速度和速度。
它能感知平衡车的前后倾斜和加速度变化,并将这些信息传输给控制系统。
3. 电机的作用电机是平衡车的驱动装置,其转速和方向的变化直接影响着平衡车的运行状态。
控制系统会根据陀螺仪和加速度传感器的信号来调整电机的转速和方向,以实现平衡车的自平衡。
二、平衡车的自平衡机制平衡车的自平衡机制主要依靠PID控制算法实现。
PID控制算法(比例 - 积分 - 微分控制算法)是一种常用的控制方法,它通过计算误差信号的比例、积分和微分来调整控制器的输出,以达到控制目标。
1. 比例控制比例控制是PID控制算法的第一个环节,它根据陀螺仪和加速度传感器的信号计算出车身倾斜的角度误差。
然后,控制系统通过调整电机的转速和方向来减小这一误差。
2. 积分控制积分控制是PID控制算法的第二个环节,它将之前累积的误差进行积分计算,并利用这个积分值调整电机的输出。
积分控制的作用是消除比例控制无法完全消除的静差,提高系统的稳定性。
3. 微分控制微分控制是PID控制算法的第三个环节,它基于误差的变化率来调整电机输出。
微分控制能够根据平衡车的倾斜速度和加速度的变化快速响应,以提高系统的动态响应性。
通过比例、积分和微分的组合调节,PID控制算法能够根据陀螺仪和加速度传感器的反馈信号,精确计算出电机的转速和方向,从而实现平衡车的自平衡。
平衡车的原理是什么平衡车,也被称为电动平衡车、电动独轮车或电动滑板车,是一种个人代步工具,它能够通过倾斜身体来控制前进、后退、转弯等动作,给人一种非常独特的驾驶体验。
那么,平衡车的原理究竟是什么呢?接下来,我们就来详细探讨一下。
首先,平衡车的原理是基于陀螺仪和加速度传感器的。
陀螺仪是一种能够测量角速度的仪器,而加速度传感器则可以感知车辆的加速度和倾斜角度。
当骑手倾斜身体时,陀螺仪和加速度传感器会立即感知到这一动作,并将相关信息传输给平衡车的控制系统。
控制系统会根据接收到的数据来调整车辆的电机转速,从而实现平衡车的前进、后退、转弯等操作。
其次,平衡车的原理还涉及到动力系统。
一般来说,平衡车采用电动机作为动力源,通过控制电机的转速和方向来实现车辆的运动。
当骑手倾斜身体向前时,控制系统会增加电机的转速,从而使车辆向前运动;当骑手倾斜身体向后时,控制系统会减小电机的转速,使车辆向后运动;而在转弯时,控制系统则会调整左右两侧电机的转速,实现车辆的转向动作。
此外,平衡车的原理还与车辆结构和重心有关。
一般来说,平衡车采用双轮结构,车辆的重心位于车轮之间的中心位置。
这种设计使得平衡车在行驶过程中更加稳定,骑手可以更加轻松地控制车辆的平衡和运动。
同时,一些高端平衡车还会采用智能控制系统和高精度传感器,以提高车辆的稳定性和灵活性,给骑手带来更加舒适的驾驶体验。
总的来说,平衡车的原理是基于陀螺仪和加速度传感器的控制系统,配合电动机的动力驱动,以及车辆的结构和重心设计。
通过这些关键技术和原理的应用,平衡车能够实现骑手倾斜身体来控制车辆的前进、后退、转弯等动作,给人一种独特而有趣的驾驶体验。
随着科技的不断发展和创新,相信平衡车的原理和性能还会不断得到提升,为人们的出行带来更多的便利和乐趣。
34 •电子技术与软件工程 Electronic Technology & Software Engineering 软件开发 • Software Development【关键词】旋翼 动平衡 配重 Arduino 1 前言无人直升机没有驾驶员,无法通过人体感受机身的振动,如果忽视了旋翼动平衡调整,会造成无人直升机大部分附件呈现疲劳状态,缩短了部件的使用寿命,增大了能耗,从而提升了维修成本,甚至可能激发共振;因此每次进行旋翼和传动系统的改装后必须进行旋翼的动平衡值检查。
A V500系列无人直升机主旋翼为2片桨叶,尾旋翼为2片桨叶,其旋翼动平衡调整分为锥体调整和动平衡调整。
锥体调整则通过调整对应桨叶的变距拉杆来完成。
动平衡调整则通过在桨叶上增减配重片的方法来实现,需要进行计算。
根据测试设备得出的振动值与相位,再利用初始振动、试重和加重后振动组成的矢量关系算法,并结合4.8寸工业触摸屏的简单界面操作即可完成动平衡调整。
2 动平衡调整原理及步骤近年来无人机直升机飞速发展,但国产的动平衡调整设备仍然比较欠缺,在测量振动情况的基础上如何给出高效准确的调整方法仍是有待进一步研究的课题。
目前以Vibrex2000为代表的通用型动平衡测量仪只能得到动平衡的幅值和相位,无法给出调整建议,维护人员一般根据工作经验,得到相应桨叶的配重增减的情况,具有一定的盲目性。
动平衡调整的实质是矢量问题,需要将测得的振动值降到0.2IPS 以下,实际计算中基于Arduino 的直升机动平衡辅助计算设备开发文/徐盟一般将目标振动值设为0来计算,因为其它各方面因素的影响,要达到0几乎是不可能的。
由于配重只能在桨叶上增加,则有了配重质量的方向限制,因此需要引入矢量的概念,需要在桨叶方向上进行矢量分解,分解的矢量大小可利用三角函数计算方法以及列出二元二次方程进行求解得到。
主旋翼的动平衡调整如下图1所示,从下往上看旋翼为顺时针旋转方向。
2019年2期花炮科技与市场设计与应用 202Design and Application基于Arduino 自平衡小车的研究与设计*艾振钹,刘玉秋,郑全新(荆楚理工学院,湖北 荆门 448000)【摘 要】文章设计了一种简易自制的两轮平衡小车,采用Arduino 单片机作为主控器,将MPU-6050陀螺仪传感器以及车轮上的AB 相增量式霍尔编码器相结合作为小车的姿态检测系统,通过驱动模TB6612FNG 控制直流无刷电机,从而使小车达到平衡状态。
在小车平衡的基础上,采用蓝牙控制,实现小车前进、后退、转向。
如果对原型机加以改造,可运用于更多领域。
【关键词】自平衡;陀螺仪;加速度计;蓝牙中图分类号:TH122 文献标志码:A 文章编号:2096-5699(2019)02-0202-01基金项目:2018年度湖北省大学生科技创新项目“Arduino 自平衡小车的研究与设计”;2017年度荆楚理工学院拔尖创新人才培养计划“九渊计划”成果之一作者简介:艾振钹(1998—),男,四川内江人,本科,研究方向:电气工程及其自动化;郑全新(1970—),男,湖北荆门人,硕士,副教授,研究方向:应用型人才培养。
1 驱动硬件的构建采用了陀螺仪(MPU-6050)检测小车车身的前倾后仰以及其状态的变化率;通过Arduinod 单片机对得到的数据进行分析处理,得到一个完整的且稳定的小车车身姿态信息;通过驱动模块TB6612F 来控制电机的正反转,从而使得小车车身达到平衡状态,蓝牙用来控制小车的前进以及后退等指令。
1.1 姿态检测模块为实现两轮小车车身的平衡与运动,快速、准确地获得小车车身姿态是重要的前提条件。
传感器既用于内部反馈控制,也用于感知与外部环境的相互作用。
当小车运动时,运动信息由传感器传送到控制器,然后由控制器来判断其运动状态。
MPU-6050是一种集成了加速度传感器和陀螺仪,通过它获得小车的角度和加速度,配合电机中自带的霍尔原件,得到电机位置和车轮实时速度的信息。
平衡车什么原理
平衡车是一种可自主保持平衡的电动交通工具。
它的原理可以分为两个主要方面:借助陀螺效应和采用电子控制系统。
首先,平衡车利用了陀螺效应来保持平衡。
陀螺效应是指在物体旋转或移动时,其旋转轴会维持一个相对稳定的方向。
平衡车内部有一个旋转的陀螺仪,当车身倾斜时,陀螺仪内部的旋转轴会自动偏离原本的方向,并通过一系列的机械结构和传感器来感知车身的倾斜角度。
根据倾斜角度的变化,平衡车可以通过调整轮胎的转速或倾斜角度来使自己保持平衡。
其次,平衡车采用电子控制系统来实现平衡和操控。
这个系统通常包括一组倾斜传感器、计算机芯片和电机控制器。
倾斜传感器可以实时感知车身倾斜的角度,并将这些数据传输给计算机芯片。
计算机芯片会对传感器数据进行分析处理,根据车身的倾斜情况,向电机控制器发送指令。
电机控制器负责控制电机的转速,以便调整车身的倾斜角度并保持平衡。
通过上述原理的结合,平衡车能够根据不同的倾斜情况,主动调整轮胎转速或倾斜角度,从而保持平衡状态。
骑手只需要通过身体轻微的倾斜来控制方向,平衡车就能根据倾斜情况做出相应的调整,实现前进、后退、转弯等操控动作。
平衡原理 一、平衡小车原理 平衡小车是通过两个电机运动下实现小车不倒下直立行走的多功能智能小车,在外力的推拉下,小车依然保持不倒下。这么一说可能还没有很直观的了解究竟什么是平衡小车,不过这个平衡小车实现的原理其实是在人们生活中的经验得来的。如果通过简单的练习,一般人可以通过自己的手指把木棒直立而不倒的放在指尖上,所以练习的时候,需要学会的两个条件:一是放在指尖上可以移动,二是通过眼睛观察木棒的倾斜角度和倾斜趋势(角速度)。通过手指的移动去抵消木棒倾斜的角度和趋势,使得木棒能直立不倒。这样的条件是不可以缺一的,实际上加入这两个条件,控制过程中就是负反馈机制。 而世界上没有任何一个人可以蒙眼不看,就可以直立木棒的,因为没有眼睛的负反馈,就不知道笔的倾斜角度和趋势。这整个过程可以用一个执行式表达:
平衡小车也是这样的过程,通过负反馈实现平衡。与上面保持木棒直立比较则相对简单,因为小车有两个轮子着地,车体只会在轮子滚动的方向上发生倾斜。控制轮子转动,抵消在一个维度上倾斜的趋势便可以保持车体平衡了。 所以根据上述的原理,通过测量小车的倾角和倾角速度控制小车车轮的加速度来消除小车的倾角。因此,小车倾角以及倾角速度的测量成为控制小车直立的关键。我们的亚博智能平衡小车使用了测量倾角和倾角速度的集成传感器陀螺仪-MPU6050(模块详细介绍在亚博智能平衡小车光盘资料3.硬件资料中)。
二、角度(物理分析 PD算法)
图1
图2 控制平衡小车,使得它作加速运动。这样站在小车上(非惯性系,以车轮作为坐标原点)分析倒立摆受力,它就会受到额外的惯性力,该力与车轮的加速度方向相反,大小成正比。这样倒立摆(如图2)所受到的回复力为:公式1 F = mg sin θ-ma cos θ≈mg θ-mk1θ 式1中,由于θ很小,所以进行了线性化。假设负反馈控制是车轮加速度a与偏角θ成正比,比例为k1。如果比例k1>g,(g是重力加速度)那么回复力的方向便于位移方向相反了。 而为了让倒立摆能够尽快回到垂直位置稳定下来,还需要增加阻尼力。增加的阻尼力与偏角的速度成正比,方向相反,因此公式1可改为: F = mg θ-mk1 θ -mk2 θ` 按照上述倒立摆的模型,可得出控制小车车轮加速度的算法: a =k1θ+k2θ` 式中θ为小车角度,θ`为角速度。k1 k2都是比例系数 根据上述内容,建立速度的比例微分负反馈控制,根据基本控制理论讨论小车通过闭环控制保持稳定的条件(这里需要对控制理论有基本了解)。假设外
力干扰引起车模产生角加速度x(t)。沿着垂直于车模地盘方向进行受力分析,可
以得到车模倾角与车轮运动加速度以及外力干扰加速度a(t)x(t)之间的运动方程。如图3所示。
图3 在角度反馈控制中,与角度成比例的控制量是称为比例控制;与角速度成比例的控制量称为微分控制(角速度是角度的微分)。因此上面系数k1,k2分别称为比例和微分控制参数。其中微分参数相当于阻尼力,可以有效抑制车模震荡。通过微分抑制控制震荡的思想在后面的速度和方向控制中也同样适用。 总结控制车模直立稳定的条件如下: (1)能够精确测量车模倾角θ的大小和角速度θ'的大小; (2)可以控制车轮的加速度。 上述控制实际结果是小车与地面不是严格垂直,而是存在一个对应的倾角。在重力的作用下,小车会朝着一个方面加速前进。为了保持小车的静止或者匀速运动需要消除这个安装误差。在实际小车制作过程中需要进行机械调整和软件参数设置。另外需要通过软件中的速度控制来实现速度的稳定性。在小车角度控制中出现的小车倾角偏差,使得小车在倾斜的方向上产生加速。这个结果可以用来进行小车的速度控制。下面将利用这个原理来调节小车的速度。
三、测速(物理模型 建立数学模型 传递函数 PD算法) 假设小车在上面直立控制调节下已经能够保持平衡了,但是由于安装误差,传感器实际测量的角度与车模角度有偏差,因此小车实际不是保持与地面垂直,而是存在一个倾角。在重力的作用下,小车就会朝倾斜的方向加速前进。控制速度只要通过控制小车的倾角就可以实现了。具体实现需要解决三个问题: (1)如何测量小车速度? (2)如何通过小车直立控制实现小车倾角的改变? (3)如何根据速度误差控制小车倾角? 第一个问题可以通过安装在电机输出轴上的霍尔测速来测量得到小车的车轮速度。如图4所示。利用控制单片机的外部中断IO口在不间断测速,速度为脉冲信号的个数可以反映电机的转速。 图4 第二个问题可以通过角度控制给定值来解决。给定小车直立控制的设定值,在角度控制调节下,小车将会自动维持在一个角度。通过前面小车直立控制算法可以知道,小车倾角最终是跟踪重力加速度Z轴的角度。因此小车的倾角给定值与重力加速度Z轴角度相减,便可以最终决定小车的倾角 第三个问题分析起来相对比较困难,远比直观进行速度负反馈分析复杂。首先对一个简单例子进行分析。假设小车开始保持静止,然后增加给定速度,为此需要小车往前倾斜以便获得加速度。在小车直立控制下,为了能够有一个往前的倾斜角度,车轮需要往后运动,这样会引起车轮速度下降(因为车轮往负方向运动了)。由于负反馈,使得小车往前倾角需要更大。如此循环,小车很快就会倾倒。原本利用负反馈进行速度控制反而成了“正”反馈。 为什么负反馈控制在这儿失灵了呢?原来在直立控制下的小车速度与小车倾角之间传递函数具有非最小相位特性(在此省略了分析),在反馈控制下容易造成系统的不稳定性。 为了保证系统稳定,往往取的小车倾角控制时间常数Tz很大。这
样便会引起系统产生两个共轭极点,而且极点的实部变得很小,使得系统的速度控制会产生的震荡现象。这个现象在实际参数整定的时候可以观察到。那么如何消除速度控制过程中的震荡呢? 要解决控制震荡问题,在前面的小车角度控制中已经有了经验,那就是在控制反馈中增加速度微分控制。但由于车轮的速度反馈信号中往往存在着噪声,对速度进行微分运算会进一步加大噪声的影响。为此需要对上面控制方法进行改进。原系统中倾角调整过程时间常数往往很大,因此可以将该系统近似为一个积分环节。将原来的微分环节和这个积分环节合并,形成一个比例控制环节。这样可以保持系统控制传递函数不变,同时避免了微分计算。 但在控制反馈中,只是使用反馈信号的比例和微分,没有利误差积分,所以最终这个速度控制是有残差的控制。但是直接引入误差积分控制环节,会增加系统的复杂度,为此就不再增加积分控制,而是通过与角度控制相结合后在进行改进。 要求小车在原地停止,速度为0。但是由于采用的是比例控制,如果此时陀螺仪有漂移,或者加速度传感器安装有误差,最终小车倾角不会最终调整到0,小车会朝着倾斜的方向恒速运行下去。注意此时车模不会像没有速度控制那样加速运行了,但是速度不会最终为0。为了消除这个误差,可以将小车倾角设定量直接积分补偿在角度控制输出中,这样就会彻底消除速度控制误差。第二点,由于加入了速度控制,它可以补偿陀螺仪和重力加速度的漂移和误差。所以此时重力加速度传感器实际上没有必要了。
此时小车在控制启动的时候,需要保持小车的垂直状态。此时陀螺仪的积分角度也初始化为0。当然如果电路中已经包括了重力加速度传感器,也可以保留这部分,从而提高小车的稳定性。在后面的最终给定的控制方案中,保留了这部分的控制回路。
四、转向控制(PD算法) 通过左右电机速度差驱动小车转向消除小车距离道路中心的偏差。通过调整小车的方向,再加上车前行运动,可以逐步消除小车距离中心线的距离差别。这个过程是一个积分过程,因此小车差动控制一般只需要进行简单的比例控制就可以完成小车方向控制。但是由于小车本身安装有电池等比较重的物体,具有很大的转动惯量,在调整过程中会出现小车转向过冲现象,如果不加以抑制,会使得小车过度转向而倒下。根据前面角度和速度控制的经验,为了消除小车方向控制中的过冲,需要增加角度微分控制。
五、全方案整合 通过上面介绍,将车模直立行走主要的控制算法集中起来,如图5 图5 为了实现小车直立行走,需要采集如下信号: (1)小车倾角速度陀螺仪信号,获得小车的倾角和角速度。 (2) 重力加速度信号 (z轴信号),补偿陀螺仪的漂移。该信号可以省略,有速度控制替代。 (3) 小车电机转速脉冲信号,获得小车运动速度,进行速度控制。 (4) 小车转动速度陀螺仪信号,获得小车转向角速度,进行方向控制。
在小车控制中的直立、速度和方向控制三个环节中,都使用了比例微分(PD)控制,这三种控制算法的输出量最终通过叠加通过电机运动来完成。 (1)小车直立控制:使用小车倾角的PD(比例、微分)控制;
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //IIC获取MPU6050六轴数据 ax ay az gx gy gz Angletest(); //获取angle 角度和卡曼滤波 angleout(); //角度环 PD控制 //////////////////角度PD//////////////////// void angleout() { Output = kp * (angle + angle0) + kd * Gyro_x; //PD 角度环控制 }
(2)小车速度控制:使用PD(比例、微分)控制;
Outputs = ksi * (setp0 - positions) + ksp * (setp0 - speeds_filter); //速度环控制 PI
(3)小车方向控制:使用PD(比例、微分)控制。