智能平衡车原理图
- 格式:pdf
- 大小:30.28 KB
- 文档页数:1
平衡车工作原理平衡车,也称为电动平衡车、独轮平衡车或者电动独轮车,是一种个人代步工具,它通过倾斜身体来控制前进、后退、转弯等动作。
那么,平衡车是如何工作的呢?接下来,我们将详细介绍平衡车的工作原理。
首先,平衡车的核心部件是陀螺仪和加速度传感器。
陀螺仪可以感知车身的倾斜角度,而加速度传感器则可以感知车身的加速度。
这两个部件的数据会被传输到控制系统中,控制系统会根据这些数据来调整电机的转速,从而实现平衡车的平衡。
其次,平衡车采用了闭环控制系统。
闭环控制系统是指系统可以根据外部反馈信息来调整自身的工作状态,以达到预定的控制目标。
在平衡车中,陀螺仪和加速度传感器就是提供给控制系统的反馈信息,控制系统会根据这些信息来调整电机的转速,使车辆保持平衡状态。
另外,平衡车的电机也是至关重要的部件。
电机会根据控制系统的指令来调整轮胎的转速,从而实现平衡车的前进、后退、转弯等动作。
一般来说,平衡车会采用无刷直流电机,这种电机具有响应速度快、效率高、噪音小等优点,非常适合用于个人代步工具。
此外,平衡车还配备了锂电池作为能源来源。
锂电池具有能量密度高、重量轻、循环寿命长等优点,非常适合用于个人代步工具。
平衡车的锂电池会为电机提供电能,从而驱动车辆的运动。
综上所述,平衡车的工作原理主要包括陀螺仪和加速度传感器感知车身姿态,闭环控制系统根据反馈信息调整电机转速,电机驱动车辆运动,锂电池为电机提供能源。
通过这些部件的协同作用,平衡车可以实现平衡并且根据用户的倾斜动作来进行前进、后退、转弯等操作。
总的来说,平衡车的工作原理相对简单,但其中涉及到的控制系统、传感器技术、电机技术等方面的知识还是非常丰富的。
随着科技的不断发展,相信平衡车的工作原理会越来越完善,为人们的出行带来更多的便利和乐趣。
平衡车的设计原理平衡车的设计原理是基于惯性平衡原理和动力控制原理。
惯性平衡原理是指车身前后倾角和重心位置之间的关系,通过调整车身的前后倾角来控制车体的平衡。
动力控制原理是指通过电机和传感器来感知车体的倾斜情况,并根据倾斜角度的变化调整电机的转速,产生合适的动力输出,以保持车体的平衡。
平衡车通常由车身、电机、电池、控制系统和传感器等组成。
车身是整个平衡车的主要支撑结构,需要具备足够的稳定性和强度。
电机是驱动车轮转动的动力来源,通常采用无刷直流电机。
电池则为平衡车提供电能,常见的是锂电池。
控制系统是平衡车的大脑,负责处理传感器采集的数据,并通过算法控制电机的转速。
传感器用于感知车身的倾斜角度和运动状态,常用的传感器包括加速度计、陀螺仪和倾斜传感器等。
当平衡车向前倾斜时,倾斜传感器会检测到这一倾斜状态,并将信号发送给控制系统。
控制系统根据传感器的数据计算出车身的倾斜角度,并调整电机的转速,产生向前的推力。
这样,车身就会逐渐恢复平衡状态。
同理,当平衡车向后倾斜时,控制系统会相应地调整电机的转速,产生向后的推力。
通过不断的调整电机的转速,平衡车能够保持在直立的平衡状态。
值得注意的是,平衡车的设计原理也与车身结构和重心位置有关。
通常情况下,平衡车的重心位置会尽量靠近车轮的中心,这有利于提高车身的稳定性和敏捷性。
此外,车身的转弯半径也会受到重心位置的影响,重心越低,转弯半径越小。
总之,平衡车的设计原理是通过惯性平衡原理和动力控制原理,结合车身、电机、电池、控制系统和传感器等组成部分,实现车身的平衡控制。
这种设计原理使得平衡车能够在使用者骑乘时保持平衡,实现前进、后退、转弯等基本动作。
平衡车工作原理
平衡车又被称为自平衡电动车,是一种独特的交通工具,在使用时可以实现自动平衡和驾驶。
它的工作原理主要基于陀螺仪和加速度计。
一台平衡车通常由两个轮子、一台电动机、一个陀螺仪和加速度计以及一套控制系统组成。
控制系统通过感知车身的倾斜角度信息,并将这些数据传输给电动机进行实时调整,以实现保持平衡的功能。
在使用平衡车时,当用户想要前进时,向前倾斜身体,这会被陀螺仪和加速度计感知到。
感知到的倾斜信息会被传输给控制系统,然后控制系统会通过控制电动机的转速和力度,使得平衡车向前移动。
同样的原理适用于后退、左移和右移,只需要相应的倾斜方向和角度。
平衡车的核心是陀螺仪和加速度计。
陀螺仪用于感知车体的倾斜角度,它通过检测旋转力矩来判断车体是否处于平衡状态。
加速度计则用于感知车体的加速度和方向变化。
这两个设备通过检测车体的倾斜和加速度变化,向控制系统提供准确的信息,以便系统可以及时做出反应。
控制系统是平衡车的智能大脑,它负责接收来自陀螺仪和加速度计的数据,并根据这些数据进行计算和判断。
一旦控制系统检测到车体的倾斜状态,它会调整电动机的转速和力度,以实现平衡。
这种实时反馈调整可以使平衡车保持在直立的状态,即使在不平坦的地面上也能保持稳定。
总的来说,平衡车的工作原理是通过感知车体的倾斜角度和加速度变化,将这些信息传递给控制系统,然后系统通过调整电动机的转速和力度来实现自动平衡和驾驶的功能。
这种智能控制系统使得平衡车成为一种便捷、环保且易于操作的交通工具。
深度解读平衡车如何工作?独轮车和双轮车平衡车的工作原理平衡车如何工作?谈到平衡我们就不得不说到陀螺仪,陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。
人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。
我们骑自行车其实也是利用了这个原理。
轮子转得越快越不容易倒,因为车轴有一股保持水准的力量。
陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。
然后用多种方法读取轴所指示的方向,并自动将资料信号传给控制系统。
加速度和角速度两个感测器都无法单独获得动态情况下的准确,稳定的姿态,但是这两种传感器具有互补性,即加速度感测器,在静态情况下使用效果会好一些,陀螺仪在动态情况下使用,效果会好一些。
此时,就需要一种演算法,来将这两种信号进行有效融合,才能获取准确的姿态资讯。
所以电动独轮平衡车主要通过控制器(智慧晶片),姿态感测器(陀螺仪),执行器(电机)三部分来实现平衡。
当驾驶者倾斜身体时,姿态感测器输出相应姿态资讯,控制器感知到这个资讯后,命令电机向相应方向旋转,姿态感测器按一定频率不停地测量车子姿态,并输出姿态息到控制器,控制器不停地调整电机的转动方向和转速,这样就保持了一个动态的平衡。
独轮平衡车的工作原理:一方面是由于人能够调整重心,调整车前行的方向,车前行的方向发生转变由于惯性就能平衡重力的侧翻力矩。
还有重要的一点是高速旋转的轮子具有较大的角动量,角动量能够抵抗外力矩,就好比陀螺不倒一样。
在大学物理里,这种现象叫进动,自传体能把外力矩的方向旋转90度。
在这里就是轮子把侧翻力矩变成使自行车转向的力矩。
利用电机来加强改进平衡:在此基础上,自平衡电动独轮车加以改进,靠电机驱动的,采用陀螺仪与驱动电路控制保持不倒把身体向前倾斜就可以启动。
速度则是由身体的倾斜程度来控制的,想要加速则向前倾,减速则向后倾。
抛开人的主动操控,独轮平衡车保证正常工作一定离不开加速度感测器和角速度感测器(陀螺仪)加速度感测器:加速度感测器可以测量由地球引力作用或者物体运动所产生的加速度。
读书报告:平衡车的原理及功能实现方法载人平衡车是一种靠电能提供能源,能够载人直立平衡行走的交通工具。
随着社会的发展,公共交通的拥堵也成为普片现象,越来越受到人们的关注。
载人平衡车由于其体积小巧轻便,适用能力强,能够有效缓解交通压力。
两轮自平衡车是当今机器人研究领域的一个重要分支,它涵盖了电子、机械、自动控制与信号处理等多个学科。
其结构类似于倒立摆,具有非线性、强耦合的特性。
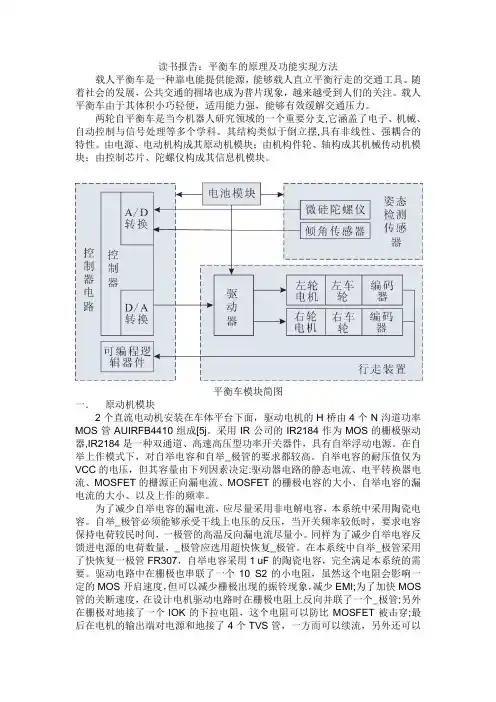
由电源、电动机构成其原动机模块;由机构件轮、轴构成其机械传动机模块;由控制芯片、陀螺仪构成其信息机模块。
平衡车模块简图一.原动机模块2个直流电动机安装在车体平台下面,驱动电机的H桥由4个N沟道功率MOS管AUIRFB4410组成[5j。
采用IR公司的IR2184作为MOS的栅极驱动器,IR2184是一种双通道、高速高压型功率开关器件,具有自举浮动电源。
在自举上作模式下,对自举电容和自举_极管的要求都较高。
自举电容的耐压值仅为VCC的电压,但其容量由下列因素决定:驱动器电路的静态电流、电平转换器电流、MOSFET的栅源正向漏电流、MOSFET的栅极电容的大小、自举电容的漏电流的大小、以及上作的频率。
为了减少自举电容的漏电流,应尽量采用非电解电容,本系统中采用陶瓷电容。
自举_极管必须能够承受干线上电压的反压,当开关频率较低时,要求电容保持电荷较民时间,一极管的高温反向漏电流尽量小。
同样为了减少自举电容反馈进电源的电荷数量,_极管应选用超快恢复_极管。
在本系统中自举_极管采用了快恢复一极管FR307,自举电容采用1 uF的陶瓷电容,完全满足本系统的需要。
驱动电路中在栅极也串联了一个10 S2的小电阻,虽然这个电阻会影响一定的MOS开启速度,但可以减少栅极出现的振铃现象,减少EMI;为了加快MOS 管的关断速度,在设计电机驱动电路时在栅极电阻上反向并联了一个_极管;另外在栅极对地接了一个lOK的下拉电阻,这个电阻可以防比MOSFET被击穿;最后在电机的输出端对电源和地接了4个TVS管,一方而可以续流,另外还可以抑制大的尖峰脉冲。
电动平衡车原理
电动平衡车,又称电动独轮车、电动滑板车,是一种新型的个人交通工具,它
以独特的外形和便捷的操控性能受到了越来越多人的喜爱。
那么,电动平衡车是如何实现平衡和操控的呢?接下来,我们就来探讨一下电动平衡车的原理。
首先,电动平衡车的平衡原理是基于陀螺仪原理的。
陀螺仪原理是指当一个物
体旋转时,它会产生一个称为陀螺力的力,这个力会使物体保持平衡。
在电动平衡车中,内置的陀螺仪感应到车身的倾斜角度,然后通过控制系统对车轮进行调整,使车身保持平衡状态。
这就是为什么我们在骑行电动平衡车时,只需轻轻倾斜身体,车辆就能够自动保持平衡的原因。
其次,电动平衡车的操控原理是基于倾斜操控的。
倾斜操控是指通过身体的倾
斜来控制车辆的前进、转向和停止。
当骑手向前倾斜时,车辆就会加速前进;当骑手向后倾斜时,车辆就会减速停止;当骑手向左或向右倾斜时,车辆就会转向相应的方向。
这种操控方式简单直观,让骑手能够轻松驾驭电动平衡车。
此外,电动平衡车还采用了智能控制系统。
这个系统通过不断感知车辆的状态
和骑手的操作,实时调整车轮的转速和倾斜角度,以确保车辆的平衡和稳定。
同时,智能控制系统还能够实现一些高级功能,比如自动平衡、避障和跟随等,为骑手提供更加便捷和安全的骑行体验。
综上所述,电动平衡车的原理是基于陀螺仪原理、倾斜操控和智能控制系统的。
这些原理的结合使得电动平衡车能够实现自动平衡和简单直观的操控,成为一种受人们喜爱的个人交通工具。
随着科技的不断进步,相信电动平衡车的原理和性能还会不断得到改进和提升,为人们的出行带来更多的便利和乐趣。
课程设计题目基于PID控制的两轮平衡小车学院XXXXX 专业班级XXXXXX小组成员XXXX 指导教师XXXXX X年 XX 月 XXX小组成员介绍及分工小组成员信息小组成员分工目录机电系统实践与实验设计 (1)一、研究背景与意义 (2)二、平衡原理 (2)2.1 平衡车的机械结构 (2)2.2 自平衡车倾倒原因的受力分析 (3)2.3 平衡的方法 (3)三、两轮平衡小车总体设计 (4)3.1 整体构思 (4)3.2 姿态检测系统 (4)3.3 控制算法 (5)四、matlab建模及仿真 (6)4.1 机械模型建模及仿真(Matlab_simulink) (6)4.2 联合控制器仿真(理想状态PID) (8)五、硬件电路设计 (9)5.1、硬件电路整体框架 (9)5.2、系统运作流程介绍 (10)5.3、硬件电路模块 (10)5.31 电源供电部分 (10)5.32 主控制器部分: (10)5.33 传感器部分; (11)5.34 驱动电路部分 (11)5.35 蓝牙控制模块 (12)5.36 超声波检测模块 (13)5.37 寻迹模块 (13)六、软件控制模块 (14)6.1 系统软件设计结构 (14)6.2 整体初始化过程 (14)6.3 程序设计 (15)6.31 PID-三个参数的调整 (15)6.32 OLED显示信息 (16)6.33 PID-采集信息 (16)6.34 PID-数据计算 (17)6.35 PID-结果输出 (18)6.36 超声波避障 (18)6.37 蓝牙控制 (18)6.38 寻迹实现 (19)七、总结 (19)附录 (21)摘要:两轮自平衡车结合了两轮同轴、独立驱动、悬架结构的自平衡原理,是一种在微处理器控制下始终保持平衡的集智能化与娱乐性于一体的新型代步工具。
整车由底盘、动力装置、控制装置和转向装置组成。
机械结构采用了双轮双马达驱动;控制主要采用的是反馈调节,为了使车体更好的平衡,使用了PID调节方式;硬件上采用陀螺仪GY521 MPU-6050来采集车体的旋转角度以及旋转角加速度,采用加速度传感器来间接测量车体旋转角度,同时,加入超声波检测模块,使小车能够自动完成避障功能;通过在两轮平衡车上加入两个寻迹模块(光电传感器)来识别场地上的黑白线,使得两轮自平衡车能够沿着黑线进行寻迹完成循迹功能。
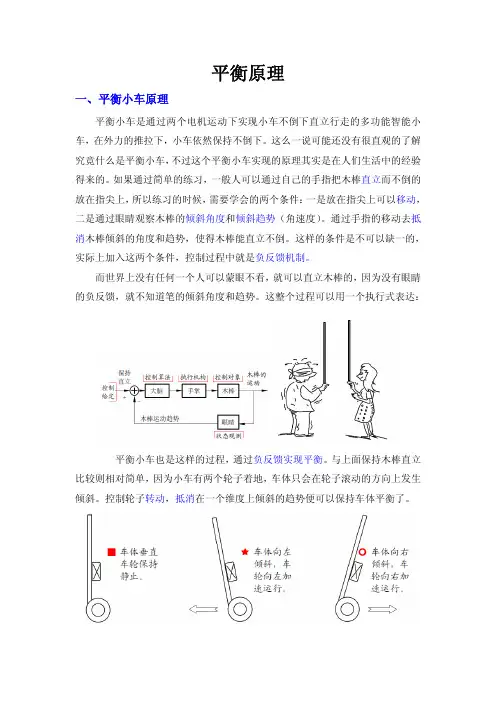
平衡车原理结构
平衡车是一种个人电动交通工具,它能够在没有辅助支撑的情况下保持平衡并行驶。
平衡车的结构主要分为车身、车轮、电机和电池四个部分。
首先是车身部分。
平衡车的车身通常采用轻量化的铝合金材料制作,以确保整车重量较轻,便于操控。
在车身中央有一个中央控制单元,它起到控制整个平衡车运行的作用。
其次是车轮部分。
平衡车通常采用双轮设计,其中每个轮子都有一个独立的电机。
这样的设计可以使平衡车在行驶时更加灵活,能够更好地应对各种地形。
电机是平衡车的动力来源,它连接在车轮上,通过电能将机械能转化为动力,推动平衡车前进或后退。
平衡车的电机通常采用无刷直流电机,具有高效率和长寿命的特点。
最后是电池部分。
平衡车的电池通常采用锂电池,它具有高能量密度和长循环寿命的特点。
电池提供平衡车所需的电能,通过电机转化为动力,驱动车辆行驶。
为了确保平衡车的续航能力和安全性,电池需要具备较高的容量和稳定的性能。
总的来说,平衡车的原理结构包括车身、车轮、电机和电池四个部分。
这些部件相互协作,通过控制系统实现平衡车在行驶过程中的平衡和操控。
通过对这些部件的精确控制,平衡车能够保持平衡,并且能够根据用户的指令进行加速、减速和转向等动作。
智能平衡车工作原理小伙伴们!今天咱们来唠唠超酷的智能平衡车的工作原理呀。
你看那智能平衡车,就那么静静地站在那儿,小小的身子好像充满了无限的魔力。
其实呢,它的核心秘密就在那一堆高科技的小零件里。
咱先来说说平衡车的大脑——传感器。
这传感器就像是平衡车的小眼睛和小耳朵,特别机灵。
它能敏锐地察觉到平衡车的状态,不管是倾斜了一点点,还是有一丁点儿的晃动,它都能快速地捕捉到。
比如说,当你稍微往前倾的时候,传感器就像个机灵鬼一样,马上就知道了,“主人往前动了呢!”然后就赶紧把这个消息传递出去。
那这个消息传给谁呢?这就轮到平衡车的控制器登场啦。
控制器就像是一个超级严格的指挥官。
它接到传感器传来的消息后,就开始快速地思考对策。
如果是往前倾的消息,它就会下达命令,让电机开始工作。
这电机可就像是平衡车的腿,接到命令后就麻溜地动起来。
电机转动起来就会带动平衡车的轮子,让平衡车按照你的想法前进。
说到轮子,这里面也有不少学问呢。
轮子的转动速度和方向都是精确控制的。
要是你想慢慢往前走,电机就会让轮子慢悠悠地转;要是你想加速,电机就会加大马力,轮子就转得飞快啦。
而且呀,平衡车的两个轮子还得配合得特别默契,就像两个小伙伴手拉手一样。
要是一个轮子转得快,一个转得慢,那平衡车可就要摔跤啦,就像两个人走路步伐不一致就会绊倒一样。
再讲讲平衡车怎么保持平衡的吧。
这可全靠它的自动平衡系统啦。
这个系统就像是一个超级稳定的小助手。
当你站在平衡车上的时候,它一直在努力让你保持平稳。
比如说,你往左倾斜了,它就会让左边的电机转得慢一点,右边的电机转得快一点,这样平衡车就会往右边倾斜一点,把你的身体拉回到平衡的状态。
就好像你站在一个小船上,船有点往左歪了,有人赶紧在右边加点重量,让船重新平稳起来一样。
还有电池呢,电池可是平衡车的能量源泉。
没有电池,这平衡车就像一个泄了气的皮球,动都动不了。
电池就像一个默默奉献的小管家,源源不断地给电机、传感器还有控制器提供能量。