图像分析:二值图像连通域标记
- 格式:docx
- 大小:142.17 KB
- 文档页数:9
⼆值图像连通区域标记这⾥列举⼆值图像连通域标记算法包括直接扫描标记算法和⼆值图像连通域标记快速算法⼀、直接扫描标记算法把连续区域作同⼀个标记,常见的四邻域标记算法和⼋邻域标记算法。
1、四邻域标记算法:1)判断此点四邻域中的最左,最上有没有点,如果都没有点,则表⽰⼀个新的区域的开始。
2)如果此点四邻域中的最左有点,最上没有点,则标记此点为最左点的值;如果此点四邻域中的最左没有点,最上有点,则标记此点为最上点的值。
3)如果此点四邻域中的最左有点,最上都有点,则标记此点为这两个中的最⼩的标记点,并修改⼤标记为⼩标记。
2、⼋邻域标记算法:1)判断此点⼋邻域中的最左,左上,最上,上右点的情况。
如果都没有点,则表⽰⼀个新的区域的开始。
2)如果此点⼋邻域中的最左有点,上右都有点,则标记此点为这两个中的最⼩的标记点,并修改⼤标记为⼩标记。
3)如果此点⼋邻域中的左上有点,上右都有点,则标记此点为这两个中的最⼩的标记点,并修改⼤标记为⼩标记。
4)否则按照最左,左上,最上,上右的顺序,标记此点为四个中的⼀个。
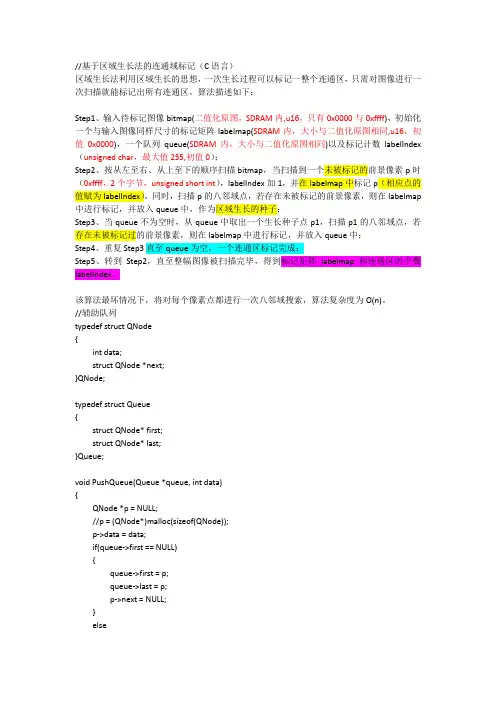
代码实现:273. 功能说明:将所选出的等价关系,attach到list上⾥274. 参数说明:275. pEqualMark 等价关系276. num1 新的等价关系1277. num2 新的等价关系2278. nEqualNum 等价数组的个数279. plEqualMark 存放等价数组的list280. 返回值:⽆281. */282. template<typename elemType> void AttachEqualMark(EqualMark &pEqualMark,elemType num1, elemType num2, int & pEqualNum, std 283. {284. //num1⼩的情况285. if ( num1 < num2 )286. {287. if ( pEqualMark.MarkValue1 != num1288. || pEqualMark.MarkValue2 != num2 )289. {290. pEqualMark.MarkValue1=num1;291. pEqualMark.MarkValue2=num2;292. //插⼊到数组中293. pEqualNum++;294. plEqualMark.push_back(pEqualMark);295. }296. }297. //num2⼩的情况298. else299. {300. if ( pEqualMark.MarkValue2 != num1301. || pEqualMark.MarkValue1 != num2 )302. {303. pEqualMark.MarkValue1=num2;304. pEqualMark.MarkValue2=num1;305. //插⼊到数组中306. pEqualNum++;307. plEqualMark.push_back(pEqualMark);308. }309. }310.311. }312.313. /*314. 功能说明:快速⼆值图像连通域标记315. 参数说明:lpImgBits,表⽰图象数据区指针316. nMarkNumbers,表⽰标记数量317. iColorType,表⽰被标记颜⾊的值(,)318. nImageWidth,表⽰图象的宽319. nImageHeight,表⽰图象的⾼320. 返回值:BOOL类型,TRUE,表⽰成功;FLASE,表⽰失败321. */322. BOOL MarkImage(BYTE * lpImgBits,int & nMarkNumbers,int iColorType,long nImageWidth,long nImageHeigt,std::list< MarkRegion> &lis 323. {324. BYTE * lpImgBitsMove=NULL;//lpImgBitsMove,表⽰图象数据区偏移指针325. int * lpMark= NULL;//lpMark,表⽰标记数据指针326. int * lpMarkMove = NULL;//lpMarkMove,表⽰标记数据偏移指针327. //iColorType为⽬标的图像值328. long lSize = nImageWidth*nImageHeigt;329. lpMark= new int[lSize+1];330. lpMarkMove=lpMark;331. ::memset(lpMark,0,(lSize+1)*sizeof(int));332.333. int nMarkValue=1;334. /* 每次标识的值,nMarkValue会在后边递增,335. 来表⽰不同的区域,从开始标记。
在计算机视觉中,连通域处理通常用于图像二值化后的噪声去除和对象分割。
OpenCV(cv2)提供了几个用于连通域处理的函数,包括:1. 标记连通域(Connected Components)2. 轮廓检测(Contours)以下是使用cv2进行连通域处理的基本步骤:1. 读取图像:首先,你需要读取要进行连通域处理的图像。
这个图像通常是一个二值图像,其中噪声或对象被标记为白色(255),背景被标记为黑色(0)。
```pythonimport cv2img = cv2.imread('binary_image.png', cv2.IMREAD_GRAYSCALE)```2. 标记连通域:cv2提供了一个函数`connectedComponents`,用于标记连通域。
该函数返回标记后的图像和连通域的数量。
```python# 使用LSD(Line Segment Detector)进行标记cc, labels = cv2.connectedComponents(img)```3. 去除噪声:通过检查标记后的图像,你可以识别并删除噪声。
例如,你可以删除小于一定大小的连通域。
```python# 删除小于3个像素的连通域labels[labels < 3] = 0```4. 显示结果:最后,你可以显示处理后的图像。
```pythoncv2.imshow('Result', labels)cv2.waitKey(0)cv2.destroyAllWindows()```注意:以上代码仅为示例,实际应用中可能需要进行更多的图像处理和优化。
matlab bwlabel 原理Matlab的bwlabel函数是一种用于图像分割的工具,它能够将二值图像中的连通区域进行标记,从而提取出图像中的不同目标或物体。
在实际应用中,图像分割是一项非常重要的任务,它可以用于目标检测、图像识别、图像分析等领域。
而bwlabel函数作为Matlab中常用的图像分割函数之一,可以对二值图像进行连通区域标记,是图像分析与处理中必不可少的工具。
bwlabel函数的原理是基于连通区域的概念。
在二值图像中,连通区域指的是图像中具有相同像素值的像素点所构成的区域。
bwlabel 函数通过扫描图像中的像素,将具有相同像素值且相连的像素点分为一组,并为每个连通区域分配一个唯一的标签。
这个标签可以用于后续的图像分析和处理。
具体来说,bwlabel函数会从图像的左上角开始扫描,对于每个像素点,它会判断其是否为前景像素(像素值为1)。
如果是前景像素,则会检查其周围的像素点,如果周围的像素点中已经有标记过的像素点,则将当前像素点标记为相同的标签。
如果周围的像素点都没有标记过,则将当前像素点标记为一个新的标签。
通过不断扫描和标记,最终得到图像中所有连通区域的标签。
在bwlabel函数的输出中,每个像素点的标签值可以用于区分不同的连通区域。
同时,函数还会返回一个标签矩阵,该矩阵的大小与输入图像相同,每个像素点的值表示该像素点所属的连通区域的标签。
通过分析标签矩阵,我们可以得到图像中的不同连通区域的位置、大小等信息,从而实现对图像的分割和分析。
需要注意的是,bwlabel函数只能处理二值图像,即图像中的像素值只能为0或1。
如果需要处理灰度图像或彩色图像,可以先进行阈值分割,将图像转化为二值图像,然后再使用bwlabel函数进行连通区域标记。
总的来说,Matlab的bwlabel函数是一种用于图像分割的工具,通过对图像中的连通区域进行标记,可以提取出图像中的不同目标或物体。
它的原理是基于连通区域的概念,通过扫描图像中的像素,将具有相同像素值且相连的像素点分为一组,并为每个连通区域分配一个唯一的标签。
二值图像连通域标记快速算法实现算法描述首先,在进行标记算法以前,利用硬件开辟独立的图像标记缓存和连通关系数组,接着在视频流的采集传输过程中,以流水线的方式按照视频传输顺序对图像进行逐行像素扫描,然后对每个像素的邻域分别按照逆时针方向和水平方向进行连通性检测和等价标记关系合并,检测出的结果对标记等价数组和标记缓存进行更新,在一帧图像采集传输结束后,得到图像的初步标记结果以及初步标记之间的连通关系,最后,根据标号对连通关系数组从小到大的传递过程进行标号的归并,利用归并后的连通关系数组对图像标记缓存中的标号进行替换,替换后的图像为最终标记结果,并且连通域按照扫描顺序被赋予唯一的连续自然数。
图 1 标记算法流程本文快速二值图像连通域标记算法分为三个环节:1.图像初步标记:为每个像素赋予临时标记,并且将临时标记的等价关系记录在等价表中2.整理等价表:这一环节分为两个步骤:(1)将具有等价关系的临时标记全部等价为其中的最小值;(2)对连通区域以自然数顺序重新编号,得到临时标记与最终标记之间的等价关系。
3.图像代换:对图像进行逐像素代换,将临时标记代换为最终标记.经过3个环节处理后,算法输出标记后的图像,图像中连通域按照由上到下,由左至右出现的顺序被标以连续的自然数。
1 图像初始标记标记算法符号约定:算法在逆时钟方向检测连通域时用w1,w2表示连续两行的图像数据,在紧接着的顺时钟方向连通域检测时用k0,k表示连续两行经过逆时钟方向标记后的图像数据。
其在工作窗口的位置在图2、3中分别说明;对初始逆时针方向临时标记用Z表示。
Z初始标记值为1。
二值图像连通域标记算法采用8连通判断准则,通过缩小标记范围剔除了图像的边界效应。
为了简化标记处理过程,使标记处理在硬件对一帧图像传输操作时间内结束,标记处理利用中间数据缓存分为连续的两种类型,其中类型1用于直接图像序列传输,硬件发起图像序列传输时,类型1采用逆时钟顺序连通域检测,对2×3工作窗口中的二值像素进行初始标记。
基于CUDA的二值图像连通域快速标记算法改进研究基于CUDA的二值图像连通域快速标记算法改进研究近年来,随着图像处理技术的快速发展和应用领域的扩大,二值图像的连通域标记算法成为了图像处理中一个非常重要的研究内容。
在许多图像处理任务中,连通域标记常被用来提取感兴趣的物体或区域,以便进行进一步的分析和处理。
然而,对于大规模的图像数据,传统的连通域标记算法往往效率较低,难以满足实时处理的要求。
因此,改进二值图像连通域快速标记算法具有重要的研究意义和应用价值。
CUDA(Compute Unified Device Architecture)是一种并行计算架构,可以利用GPU(图形处理器)进行高性能计算。
由于其强大的计算能力和并行处理的特性,CUDA已经广泛应用于各种科学计算和图像处理任务。
在二值图像连通域标记算法中,由于存在大量的重复计算和数据依赖性,使用CUDA进行并行计算可以大大提高算法的效率。
本文基于CUDA并行计算技术,对二值图像连通域快速标记算法进行了改进研究。
首先,我们对传统的连通域标记算法进行了深入分析和研究,以找出其存在的问题和改进的空间。
然后,针对这些问题,我们提出了一种基于CUDA的高效连通域标记算法。
我们的改进算法主要包括以下几个步骤:首先,将输入的二值图像数据加载到GPU的全局内存中,并对图像进行初始化。
之后,利用CUDA的并行计算能力,对图像进行扫描,并标记图像中的连通域。
在标记的过程中,我们采用了一种基于并查集的数据结构,用于快速地查找和合并连通域。
最后,将标记好的图像数据从GPU的全局内存中传回到主机端,并输出结果。
为了验证我们改进算法的效果,我们进行了大量的实验,并与传统的连通域标记算法进行了对比。
实验结果表明,我们的算法在速度和性能上都有显著的提升。
相比传统算法,我们的算法在处理大规模图像数据时,速度可以提升数十倍,并且具有更好的并行性能和扩展性。
除了提高算法的速度和性能,我们的改进算法还具有一定的优化空间。
matlab 连通域标记在图像处理中,连通域标记是指将图像中的相邻像素点组成的区域进行分组和标记的过程。
连通域标记可以用于图像分割、物体识别、图像分析等领域。
Matlab是一种功能强大的数值计算和科学编程软件,提供了丰富的图像处理工具箱,可以方便地实现连通域标记算法。
在Matlab中,可以使用bwlabel函数来实现连通域标记。
该函数可以将二值图像中的连通域进行标记,并返回每个像素所属的连通域编号。
具体步骤如下:1. 将图像二值化,即将图像转换成黑白两色(前景和背景)。
2. 使用bwlabel函数对二值图像进行连通域标记。
该函数的语法为:[L, num] = bwlabel(BW),其中BW为二值图像,L为标记后的图像,num为连通域的数量。
3. 可以使用regionprops函数对每个连通域进行属性分析。
该函数可以计算每个连通域的面积、重心、边界框等属性,并返回一个结构体数组。
以下是一个示例代码,演示了如何使用Matlab进行连通域标记和属性分析:```matlab% 读取图像image = imread('example.png');% 将图像转换为二值图像bw = imbinarize(image);% 进行连通域标记[L, num] = bwlabel(bw);% 对每个连通域进行属性分析props = regionprops(L, 'Area', 'Centroid','BoundingBox');% 输出每个连通域的属性信息for i = 1:numfprintf('连通域 %d:', i);fprintf('面积: %d', props(i).Area);fprintf('重心: (%d, %d)', props(i).Centroid(1), props(i).Centroid(2));fprintf('边界框: (%d, %d, %d, %d)', props(i).BoundingBox(1), props(i).BoundingBox(2), props(i).BoundingBox(3), props(i).BoundingBox(4));end```以上代码会输出每个连通域的面积、重心和边界框信息。
二、连通域
如果像素点A与B邻接,我们称A与B连通,于是我们不加证明的有如下的结论:
三、连通区域的标记
第一行,我们得到两个团:[2,6]和[10,13],同时给它们标记1和2。
下面是这个过程的C++实现,每个等价表用一个vector<int>来保存,等价对列表保存在map<pair<int,int>>里。
整个算法步骤,我们只扫描了一次图像,同时我们对图像中的像素进行标记,要么赋予一个新的标号,要么用它同行P点。
最后不要忘了把C的值加1。
这个过程如下面图像S1中所示。
情况3
1)如果P是外轮廓的起点,也就是说我们是从P点开始跟踪的,那么我们从7号(右上角)位置P1P1开始,看7号在L上标记为一个负值。
如下图所示,其中右图像标记的结果。
2)那么如果P是不是外轮廓的起点,即P是外轮廓路径上的一个点,那么它肯定是由一个点进入的,我们设置为P−
在OpenCV中查找轮廓的函数已经存在了,而且可以得到轮廓之间的层次关系。
这个函数按上面的算法实现起来并不。