一种二值图像连通区域标记的新算法
- 格式:pdf
- 大小:296.26 KB
- 文档页数:3
基于FPGA的二值图像连通域快速标记汪滴珠;安涛;何培龙【摘要】针对连通域标记算法运算量大、速度慢、硬件实现困难的缺点,提出一种适于现场可编程逻辑门阵列(FPGA)实现的二值图像连通域快速标记的算法,并用VHDL硬件开发语言在XILINX公司的FPGA上实现.实验结果表明了该算法能对二值图像复杂的连通关系正确标记,易于硬件实现,大大节约了硬件资源,电路结构简单,满足实时性要求.%In order to solve the prablems of low speed large computation and difficult hardware implementation of connected component labeling, a connected component fast labcling algorithm of binary image lageling applicable for field programmable gate array (FPGA) is proposed, which is implemented by VHDI. hardware description language based on FPGA platform of XILINX corporation. Experimental results show that the proposed algorithm can label binary image with complex connections correctly, implement hardware easily,save more hardware resource and meet real-time demands.【期刊名称】《现代电子技术》【年(卷),期】2011(034)008【总页数】3页(P115-117)【关键词】FPGA;二值图像;连通域;快速标记【作者】汪滴珠;安涛;何培龙【作者单位】中国科学院,光电技术研究所,四川,成都,610209;中国科学院研究生院,北京,100039;中国科学院,光电技术研究所,四川,成都,610209;中国科学院,光电技术研究所,四川,成都,610209【正文语种】中文【中图分类】TN919-34;TP391连通域标记算法是图像处理、计算机视觉和模式识别等领域的基本算法,它可以对图像中不同目标标上不同的标记,进而提取、分离目标,确定目标的特征和参数,从而对目标进行识别和跟踪。
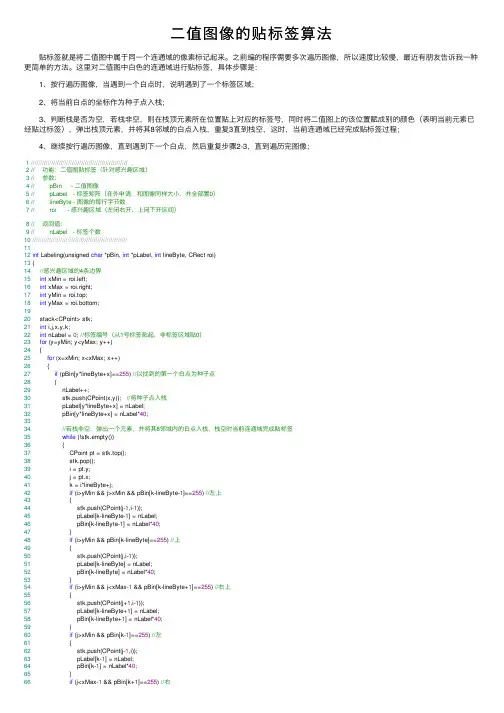
⼆值图像的贴标签算法 贴标签就是将⼆值图中属于同⼀个连通域的像素标记起来。
之前编的程序需要多次遍历图像,所以速度⽐较慢,最近有朋友告诉我⼀种更简单的⽅法。
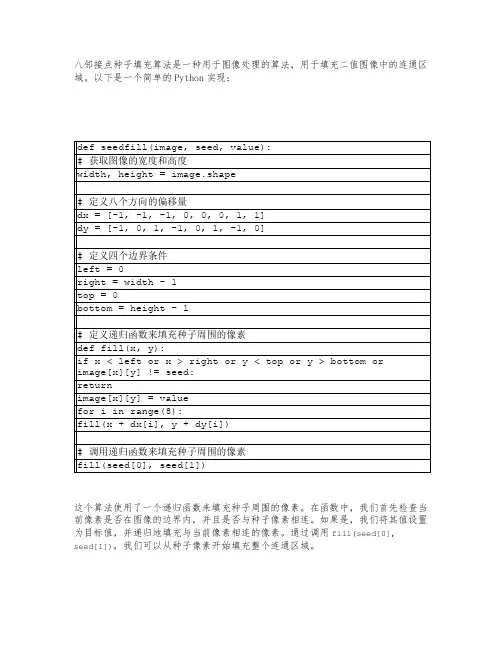
这⾥对⼆值图中⽩⾊的连通域进⾏贴标签,具体步骤是: 1、按⾏遍历图像,当遇到⼀个⽩点时,说明遇到了⼀个标签区域; 2、将当前⽩点的坐标作为种⼦点⼊栈; 3、判断栈是否为空,若栈⾮空,则在栈顶元素所在位置贴上对应的标签号,同时将⼆值图上的该位置赋成别的颜⾊(表明当前元素已经贴过标签),弹出栈顶元素,并将其8邻域的⽩点⼊栈,重复3直到栈空,这时,当前连通域已经完成贴标签过程; 4、继续按⾏遍历图像,直到遇到下⼀个⽩点,然后重复步骤2-3,直到遍历完图像;1////////////////////////////////////////////////////2// 功能:⼆值图贴标签(针对感兴趣区域)3// 参数:4// pBin - ⼆值图像5// pLabel - 标签矩阵(在外申请,和图像同样⼤⼩,并全部置0)6// lineByte - 图像的每⾏字节数7// roi - 感兴趣区域(左闭右开、上闭下开区间)8// 返回值:9// nLabel - 标签个数10///////////////////////////////////////////////////1112int Labeling(unsigned char *pBin, int *pLabel, int lineByte, CRect roi)13 {14//感兴趣区域的4条边界15int xMin = roi.left;16int xMax = roi.right;17int yMin = roi.top;18int yMax = roi.bottom;1920 stack<CPoint> stk;21int i,j,x,y,k;22int nLabel = 0; //标签编号(从1号标签贴起,⾮标签区域贴0)23for (y=yMin; y<yMax; y++)24 {25for (x=xMin; x<xMax; x++)26 {27if (pBin[y*lineByte+x]==255) //以找到的第⼀个⽩点为种⼦点28 {29 nLabel++;30 stk.push(CPoint(x,y)); //将种⼦点⼊栈31 pLabel[y*lineByte+x] = nLabel;32 pBin[y*lineByte+x] = nLabel*40;3334//若栈⾮空,弹出⼀个元素,并将其8邻域内的⽩点⼊栈,栈空时当前连通域完成贴标签35while (!stk.empty())36 {37 CPoint pt = stk.top();38 stk.pop();39 i = pt.y;40 j = pt.x;41 k = i*lineByte+j;42if (i>yMin && j>xMin && pBin[k-lineByte-1]==255) //左上43 {44 stk.push(CPoint(j-1,i-1));45 pLabel[k-lineByte-1] = nLabel;46 pBin[k-lineByte-1] = nLabel*40;47 }48if (i>yMin && pBin[k-lineByte]==255) //上49 {50 stk.push(CPoint(j,i-1));51 pLabel[k-lineByte] = nLabel;52 pBin[k-lineByte] = nLabel*40;53 }54if (i>yMin && j<xMax-1 && pBin[k-lineByte+1]==255) //右上55 {56 stk.push(CPoint(j+1,i-1));57 pLabel[k-lineByte+1] = nLabel;58 pBin[k-lineByte+1] = nLabel*40;59 }60if (j>xMin && pBin[k-1]==255) //左61 {62 stk.push(CPoint(j-1,i));63 pLabel[k-1] = nLabel;64 pBin[k-1] = nLabel*40;65 }66if (j<xMax-1 && pBin[k+1]==255) //右67 {68 stk.push(CPoint(j+1,i));69 pLabel[k+1] = nLabel;70 pBin[k+1] = nLabel*40;71 }72if (i<yMax-1 && j>xMin && pBin[k+lineByte-1]==255) //左下73 {74 stk.push(CPoint(j-1,i+1));75 pLabel[k+lineByte-1] = nLabel;76 pBin[k+lineByte-1] = nLabel*40;77 }78if (i<yMax-1 && pBin[k+lineByte]==255) //下79 {80 stk.push(CPoint(j,i+1));81 pLabel[k+lineByte] = nLabel;82 pBin[k+lineByte] = nLabel*40;83 }84if (i<yMax-1 && j<xMax-1 && pBin[k+lineByte+1]==255) //右下85 {86 stk.push(CPoint(j+1,i+1));87 pLabel[k+lineByte+1] = nLabel;88 pBin[k+lineByte+1] = nLabel*40;89 }90 }91 }92 }93 }9495return nLabel;96 }。
python中连通域算法Python 中连通域算法连通域可以简单理解为一个图像中相邻的像素点相连形成的一块区域。
在图像处理中,我们常常需要对这些连通的区域进行一些操作,比如找到其中的特征、选择某个区域进行分析或对整个区域进行一些操作。
在Python 中,我们可以使用一些算法来找到图像中的连通域并进行相应的操作。
接下来,我将逐步介绍Python 中连通域的概念、如何找到连通域、如何在连通域上进行特定操作的方法。
1. 连通域的概念在图像处理中,连通域是一个由相邻的像素点构成的区域。
在二值图像中,像素点的值通常只有两个,例如黑色和白色,被称为“0”和“1”。
连通域的数量和形状通常与图像中的目标有关。
例如,在一张图片中,我们可能需要找到所有联通的数字或字母,或者只需要找到图像中最大或最小的连通区域。
2. 连通域的查找算法在Python 中,我们可以使用不同的算法来查找连通域。
其中,最常用的两种算法是DFS(深度优先搜索)和BFS(广度优先搜索)。
在这里,我们将重点介绍DFS 算法。
DFS 算法是一种非常适合连通域查找的算法。
它的基本思路是从图像中的某个像素点开始,沿着该点所在的连通域递归地访问所有相邻的未访问过的像素点。
通过递归,我们可以遍历整个连通域,并找到所有的像素点。
为了演示DFS 算法,我们先创建一个简单的二值图像。
以下代码创建一个10x10 的方形图像,其中心区域是黑色的(0),外围是白色的(1)。
import numpy as npimport matplotlib.pyplot as pltimage = np.ones((10, 10), dtype=np.uint8) # 创建一个10x10的白色方形图像image[3:7, 3:7] = 0 # 将图像中心区域切换为黑色plt.imshow(image, cmap=plt.cm.gray) # 绘制图像plt.axis('off')plt.show()运行后,可以看到以下图像:
matlab bwlabel 原理Matlab的bwlabel函数是一种用于图像分割的工具,它能够将二值图像中的连通区域进行标记,从而提取出图像中的不同目标或物体。
在实际应用中,图像分割是一项非常重要的任务,它可以用于目标检测、图像识别、图像分析等领域。
而bwlabel函数作为Matlab中常用的图像分割函数之一,可以对二值图像进行连通区域标记,是图像分析与处理中必不可少的工具。
bwlabel函数的原理是基于连通区域的概念。
在二值图像中,连通区域指的是图像中具有相同像素值的像素点所构成的区域。
bwlabel 函数通过扫描图像中的像素,将具有相同像素值且相连的像素点分为一组,并为每个连通区域分配一个唯一的标签。
这个标签可以用于后续的图像分析和处理。
具体来说,bwlabel函数会从图像的左上角开始扫描,对于每个像素点,它会判断其是否为前景像素(像素值为1)。
如果是前景像素,则会检查其周围的像素点,如果周围的像素点中已经有标记过的像素点,则将当前像素点标记为相同的标签。
如果周围的像素点都没有标记过,则将当前像素点标记为一个新的标签。
通过不断扫描和标记,最终得到图像中所有连通区域的标签。
在bwlabel函数的输出中,每个像素点的标签值可以用于区分不同的连通区域。
同时,函数还会返回一个标签矩阵,该矩阵的大小与输入图像相同,每个像素点的值表示该像素点所属的连通区域的标签。
通过分析标签矩阵,我们可以得到图像中的不同连通区域的位置、大小等信息,从而实现对图像的分割和分析。
需要注意的是,bwlabel函数只能处理二值图像,即图像中的像素值只能为0或1。
如果需要处理灰度图像或彩色图像,可以先进行阈值分割,将图像转化为二值图像,然后再使用bwlabel函数进行连通区域标记。
总的来说,Matlab的bwlabel函数是一种用于图像分割的工具,通过对图像中的连通区域进行标记,可以提取出图像中的不同目标或物体。
它的原理是基于连通区域的概念,通过扫描图像中的像素,将具有相同像素值且相连的像素点分为一组,并为每个连通区域分配一个唯一的标签。
二值图像连通域标记快速算法实现算法描述首先,在进行标记算法以前,利用硬件开辟独立的图像标记缓存和连通关系数组,接着在视频流的采集传输过程中,以流水线的方式按照视频传输顺序对图像进行逐行像素扫描,然后对每个像素的邻域分别按照逆时针方向和水平方向进行连通性检测和等价标记关系合并,检测出的结果对标记等价数组和标记缓存进行更新,在一帧图像采集传输结束后,得到图像的初步标记结果以及初步标记之间的连通关系,最后,根据标号对连通关系数组从小到大的传递过程进行标号的归并,利用归并后的连通关系数组对图像标记缓存中的标号进行替换,替换后的图像为最终标记结果,并且连通域按照扫描顺序被赋予唯一的连续自然数。
图 1 标记算法流程本文快速二值图像连通域标记算法分为三个环节:1.图像初步标记:为每个像素赋予临时标记,并且将临时标记的等价关系记录在等价表中2.整理等价表:这一环节分为两个步骤:(1)将具有等价关系的临时标记全部等价为其中的最小值;(2)对连通区域以自然数顺序重新编号,得到临时标记与最终标记之间的等价关系。
3.图像代换:对图像进行逐像素代换,将临时标记代换为最终标记.经过3个环节处理后,算法输出标记后的图像,图像中连通域按照由上到下,由左至右出现的顺序被标以连续的自然数。
1 图像初始标记标记算法符号约定:算法在逆时钟方向检测连通域时用w1,w2表示连续两行的图像数据,在紧接着的顺时钟方向连通域检测时用k0,k表示连续两行经过逆时钟方向标记后的图像数据。
其在工作窗口的位置在图2、3中分别说明;对初始逆时针方向临时标记用Z表示。
Z初始标记值为1。
二值图像连通域标记算法采用8连通判断准则,通过缩小标记范围剔除了图像的边界效应。
为了简化标记处理过程,使标记处理在硬件对一帧图像传输操作时间内结束,标记处理利用中间数据缓存分为连续的两种类型,其中类型1用于直接图像序列传输,硬件发起图像序列传输时,类型1采用逆时钟顺序连通域检测,对2×3工作窗口中的二值像素进行初始标记。
二、连通域
如果像素点A与B邻接,我们称A与B连通,于是我们不加证明的有如下的结论:
三、连通区域的标记
第一行,我们得到两个团:[2,6]和[10,13],同时给它们标记1和2。
下面是这个过程的C++实现,每个等价表用一个vector<int>来保存,等价对列表保存在map<pair<int,int>>里。
整个算法步骤,我们只扫描了一次图像,同时我们对图像中的像素进行标记,要么赋予一个新的标号,要么用它同行P点。
最后不要忘了把C的值加1。
这个过程如下面图像S1中所示。
情况3
1)如果P是外轮廓的起点,也就是说我们是从P点开始跟踪的,那么我们从7号(右上角)位置P1P1开始,看7号在L上标记为一个负值。
如下图所示,其中右图像标记的结果。
2)那么如果P是不是外轮廓的起点,即P是外轮廓路径上的一个点,那么它肯定是由一个点进入的,我们设置为P−
在OpenCV中查找轮廓的函数已经存在了,而且可以得到轮廓之间的层次关系。
这个函数按上面的算法实现起来并不。
基于CUDA的二值图像连通域快速标记算法改进研究基于CUDA的二值图像连通域快速标记算法改进研究近年来,随着图像处理技术的快速发展和应用领域的扩大,二值图像的连通域标记算法成为了图像处理中一个非常重要的研究内容。
在许多图像处理任务中,连通域标记常被用来提取感兴趣的物体或区域,以便进行进一步的分析和处理。
然而,对于大规模的图像数据,传统的连通域标记算法往往效率较低,难以满足实时处理的要求。
因此,改进二值图像连通域快速标记算法具有重要的研究意义和应用价值。
CUDA(Compute Unified Device Architecture)是一种并行计算架构,可以利用GPU(图形处理器)进行高性能计算。
由于其强大的计算能力和并行处理的特性,CUDA已经广泛应用于各种科学计算和图像处理任务。
在二值图像连通域标记算法中,由于存在大量的重复计算和数据依赖性,使用CUDA进行并行计算可以大大提高算法的效率。
本文基于CUDA并行计算技术,对二值图像连通域快速标记算法进行了改进研究。
首先,我们对传统的连通域标记算法进行了深入分析和研究,以找出其存在的问题和改进的空间。
然后,针对这些问题,我们提出了一种基于CUDA的高效连通域标记算法。
我们的改进算法主要包括以下几个步骤:首先,将输入的二值图像数据加载到GPU的全局内存中,并对图像进行初始化。
之后,利用CUDA的并行计算能力,对图像进行扫描,并标记图像中的连通域。
在标记的过程中,我们采用了一种基于并查集的数据结构,用于快速地查找和合并连通域。
最后,将标记好的图像数据从GPU的全局内存中传回到主机端,并输出结果。
为了验证我们改进算法的效果,我们进行了大量的实验,并与传统的连通域标记算法进行了对比。
实验结果表明,我们的算法在速度和性能上都有显著的提升。
相比传统算法,我们的算法在处理大规模图像数据时,速度可以提升数十倍,并且具有更好的并行性能和扩展性。
除了提高算法的速度和性能,我们的改进算法还具有一定的优化空间。