无速度传感器直接转矩控制系统设计
- 格式:pdf
- 大小:166.19 KB
- 文档页数:3


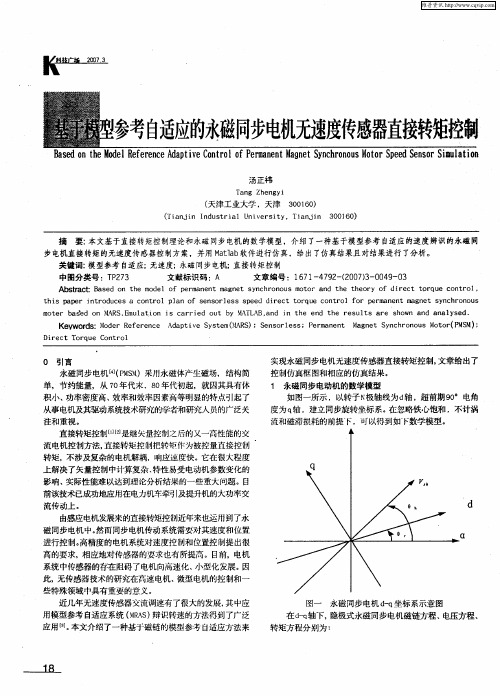

永磁同步电机无速度传感器控制技术研究永磁同步电机是一种高性能、高效率的电机,广泛应用于工业和交通领域。
传统的永磁同步电机控制方法需要使用速度传感器来测量电机转速,但是速度传感器的安装和维护成本较高,且容易受到环境干扰。
因此,研究无速度传感器控制技术对于提高永磁同步电机的控制性能具有重要意义。
无速度传感器控制技术主要通过估计电机的转速和位置来实现控制。
其中,转速估计是无速度传感器控制技术的核心。
常用的转速估计方法有基于反电动势法、模型参考自适应系统法和卡尔曼滤波法等。
基于反电动势法是一种简单且有效的转速估计方法。
该方法通过测量电机相电压和电流,利用电机的反电动势来估计电机的转速。
但是,由于电机参数和负载变化等因素的影响,估计精度有限。
模型参考自适应系统法是一种基于模型参考自适应控制理论的转速估计方法。
该方法通过建立电机的数学模型,利用模型参考自适应控制器来估计电机的转速。
该方法具有较高的估计精度,但是需要较为准确的电机模型,且计算量较大。
卡尔曼滤波法是一种基于状态估计的转速估计方法。
该方法通过建立电机的状态空间模型,利用卡尔曼滤波器来估计电机的转速。
该方法具有较高的估计精度,且对电机和负载的变化具有较好的适应性。
在无速度传感器控制技术的研究中,还需要考虑系统的稳定性和鲁棒性。
稳定性是指系统在受到干扰或参数变化时能够保持稳定的性能。
鲁棒性是指系统对于参数不确定性和外部扰动的鲁棒性。
因此,研究无速度传感器控制技术还需要考虑稳定性分析和鲁棒性设计。
总之,无速度传感器控制技术是永磁同步电机控制领域的研究热点。
通过对转速估计方法的研究和改进,可以实现对永磁同步电机的高精度、高效率控制,提高其在工业和交通领域的应用价值。
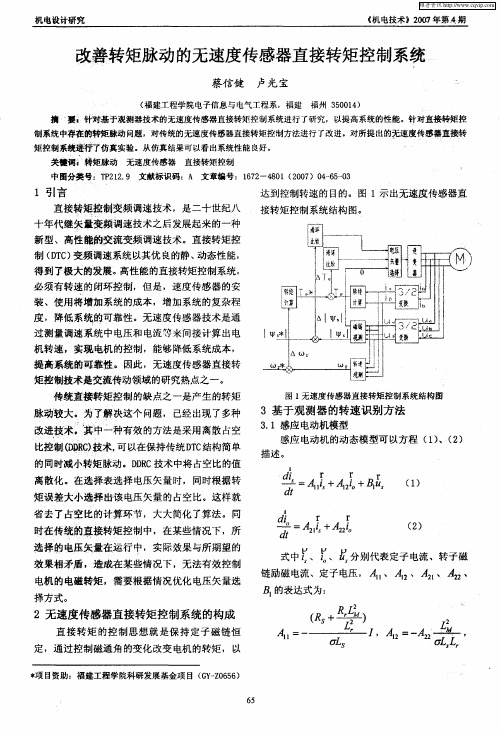
直接转矩控制直接转矩控制(Direct Torque Contro l——DTC),国外的原文有的也称为D irect self-contro l——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制。
直接转矩控制与矢量控制的区别是,它不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的分析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。
这种方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并通过磁链和转矩的直接跟踪实现P WM脉宽调制和系统的高动态性能。
直接转矩控制(Direct Torque Contro l,DTC)变频调速,是继矢量控制技术之后又一新型的高效变频调速技术。
20 世纪80 年代中期,德国鲁尔大学的M.Depenb rock教授和日本的I.Takaha shi教授分别提出了六边形直接转矩控制方案和圆形直接转矩控制方案。
1987 年,直接转矩控制理论又被推广到弱磁调速范围。
直接转矩控制技术用空间矢量的分析方法,直接在定子坐标系下计算与控制电动机的转矩,采用定子磁场定向,借助于离散的两点式调节(Band-Band)产生PWM波信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
它省去了复杂的矢量变换与电动机的数学模型简化处理,没有通常的P WM 信号发生器。
它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确。
直接转矩控制也具有明显的缺点即:转矩和磁链脉动。
针对其不足之处,现在的直接转矩控制技术相对于早期的直接转矩控制技术有了很大的改进,主要体现在以下几个方面:(1)无速度传感器直接转矩控制系统的研究在实际应用中,安装速度传感器会增加系统成本,增加了系统的复杂性,降低系统的稳定性和可靠性,此外,速度传感器不实用于潮湿、粉尘等恶劣的环境下。