异步电动机无速度传感器矢量控制系统设计
- 格式:pdf
- 大小:220.85 KB
- 文档页数:4
《异步电机无速度传感器矢量控制系统的设计与实现》一、引言随着现代工业技术的飞速发展,对于电机控制系统的性能和可靠性要求也越来越高。
其中,异步电机无速度传感器矢量控制系统是一种能够满足高性能需求的技术手段。
这种系统不需要机械式速度传感器,就能够精确控制电机的转矩和速度,具有较高的动态响应和稳定性。
本文将详细介绍异步电机无速度传感器矢量控制系统的设计与实现过程。
二、系统设计1. 总体设计异步电机无速度传感器矢量控制系统主要由电机本体、逆变器、控制器等部分组成。
其中,控制器是整个系统的核心部分,负责实现电机的矢量控制。
2. 矢量控制算法设计本系统采用无速度传感器矢量控制算法,主要包括磁链观测、转子时间常数辨识、电流控制等部分。
其中,磁链观测是实现无速度传感器控制的关键技术之一,能够根据电机定子电压和电流信息估计出转子磁链的位置和大小。
转子时间常数的辨识则是为了提高系统的动态性能和鲁棒性。
电流控制则是根据电机转矩需求和观测到的转子磁链信息,控制逆变器输出电压,实现电机的精确控制。
3. 控制器硬件设计控制器硬件主要包括微处理器、功率驱动电路、采样电路等部分。
微处理器是控制器的核心部件,负责运行矢量控制算法和实现各种保护功能。
功率驱动电路将微处理器的控制信号转换为逆变器所需的驱动信号。
采样电路则负责实时采集电机的电压、电流等信号,为矢量控制算法提供必要的输入信息。
三、系统实现1. 软件设计软件设计主要包括操作系统、控制算法程序等部分。
操作系统负责管理控制器的硬件资源,为控制算法程序提供运行环境。
控制算法程序则是实现无速度传感器矢量控制的核心程序,包括磁链观测、转子时间常数辨识、电流控制等部分的实现。
2. 实验验证为了验证本系统的性能和可靠性,我们进行了大量的实验验证。
实验结果表明,本系统具有较高的动态响应和稳定性,能够精确控制电机的转矩和速度,且无需机械式速度传感器,具有较高的实用价值。
四、结论本文介绍了一种异步电机无速度传感器矢量控制系统的设计与实现过程。


基于MRAS磁链观测、转速估计的无速度传感器异步电机矢
量控制系统
汪柏洋
【期刊名称】《科技广场》
【年(卷),期】2010(000)003
【摘要】针对传统矢量控制系统磁链观测不准,且需要速度传感器的问题,提出了一种基于MRAS磁链观测、转速估计的无速度传感器异步电机矢量控制系统.介绍了磁链观测、转速估计的MRAS结构,并运用Popov超稳定理论推导出了其对应自
适应律,建立了实验系统.实验结果表明,该矢量控制系统在启动、调速、稳态运行时具有良好的静、动态性能,是一种高性能的交流调速系统.
【总页数】4页(P191-194)
【作者】汪柏洋
【作者单位】长春理工大学电子信息工程学院,吉林,长春,130022
【正文语种】中文
【中图分类】TM343
【相关文献】
1.异步电机MRAS无速度传感器矢量控制系统设计 [J], 王平;厉虹
2.基于转矩绕组无功功率MRAS的无轴承异步电机无速度传感器矢量控制系统 [J], 杨泽斌;汪明涛;孙晓东
3.基于全阶磁链观测器的异步电机无速度传感器矢量控制系统 [J], 李立明;刘忠举
4.基于MRAS的无速度传感器异步电机矢量控制的仿真 [J], 罗桂山
5.基于交互式MRAS策略的无轴承异步电机无速度传感器矢量控制系统 [J], 高剑;黄守道;马晓枫;蔡国洋;曹彦飞
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的异步电机无速度传感器的矢量控制仿真毕业设计(论文)本科生毕业设计设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究中国矿业大学毕业设计任务书毕业设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究毕业设计主要内容和要求:1. 复习电力拖动自动控制系统课程,重点学习异步电机变压变频调速系统理论(包括异步电机动态数学模型和坐标变换技术、转子磁场定向矢量控制系统),了解国内外无传感器控制的现状及发展趋势;2. 学习TMS320C2812DSP;3.学习观测器理论、模型参考自适应等相关理论;掌握异步电动机矢量控制的方法;4.完成异步电动机转子磁链估计模型的DSP实现;5. 采用Matlab/Simulink对转子磁场定向矢量控制系统进行仿真。
院长签字:指导教师签字:中国矿业大学毕业设计指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日中国矿业大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业设计答辩及综合成绩答辩情况提出问题回答问题一正基本有确正确般性错误有原没有则性回答错误答辩委员会评语及建议成绩:答辩委员会主任签字:年月日学院领导小组综合评定成绩:学院领导小组负责人:年月日摘要异步电动机的动态数学模型是一个高阶、非线性,强耦合的多变量系统。
采用坐标变换的方式将三相静止坐标系变为两相同步旋转坐标系,可以实现定子电流的解耦,从而实现磁通和转矩的解耦控制,达到直流电机的控制效果。
肖金凤1971年1月生,1994年毕业于湖南大学电气与信息工程学院电机专业,学士学位,2004年毕业于湖南大学电气与信息工程学院控制工程专业,硕士学位,讲师。
主要研究方向为电机智能控制、工业过程控制及综合自动化。
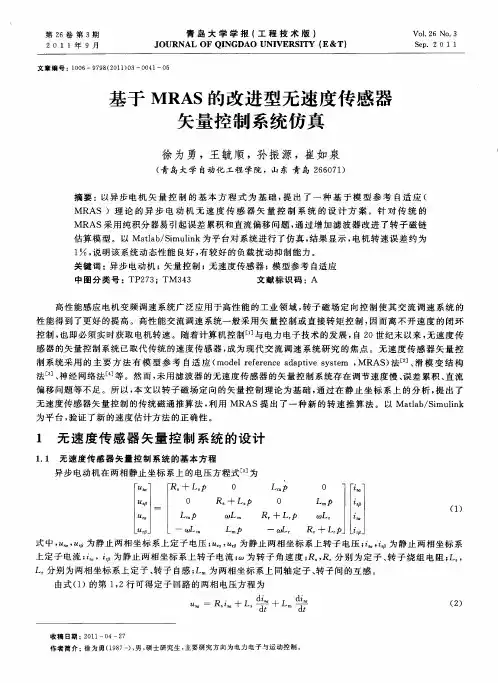
异步电动机无速度传感器矢量控制系统设计*肖金凤1, 黄守道2, 李劲松1(1.南华大学,湖南 衡阳 421001;2.湖南大学,湖南 长沙 410082) 摘要 文章提出一种基于模糊神经网络的模型参考自适应电机转速辨识方法,将其与SVP WM 调制技术控制的变频器系统结合起来,组成了一种基于DSP 的异步电机无速度传感器矢量控制系统。
具体介绍了其结构及软硬件的设计。
仿真结果表明此系统动态性能好,能准确跟踪电机转速的变化。
关键词 异步电动机 无速度传感器 SVP WM 矢量控制 数字信号处理器Fiel d Oriented Control Syste m ofSpeed Sensorless Based on DSPX iao Jinfeng ,Huang Shoudao ,L i Jingsong (1.N anhua Un iversity ;2.H unan Un i v ersity )Abstract :This paper presents a ne w m et h od of i n ducti o n m otor speed identifica -ti o n .It is the co m binati o n o f f u zzy neural net w ork (FNN )w ith m odel reference adap -ti v e syste m (MRAS).W e co m bi n e this m ethod w it h the i n verter contro lled by space vector pulse w idth m odu lati o n (SVP WM )to for m a field oriented con tro l syste m o f speed senso rless based on DSP .Its struct u re and soft w are and hardw are are ana -l y zed .The S i m u lation results sho w that the contro l syste m has better dyna m ic per -f o r m ance and can accurately track the variati o n of the m otor speed . K ey w ords :I nducti o n m oto r Speed sensorless SVP WM F ield oriented con -tro l (FOC) DSP*湖南省自然科学基金资助项目(编号:02JJ Y 2089)1 引言异步电动机的数学模型由电压方程、磁链方程、转矩方程和运动方程组成,是一个高阶、非线性、强耦合的多变量系统。
采用传统的控制策略对其进行控制时,动态控制效果较差。
目前异步电动机控制研究工作正围绕几个方面展开:采用新型电力电子器件和脉宽调制控制技术;应用矢量控制技术及现代控制理论、智能控制技术;广泛应用数字控制系统及计算机技术;无速度传感器控制技术。
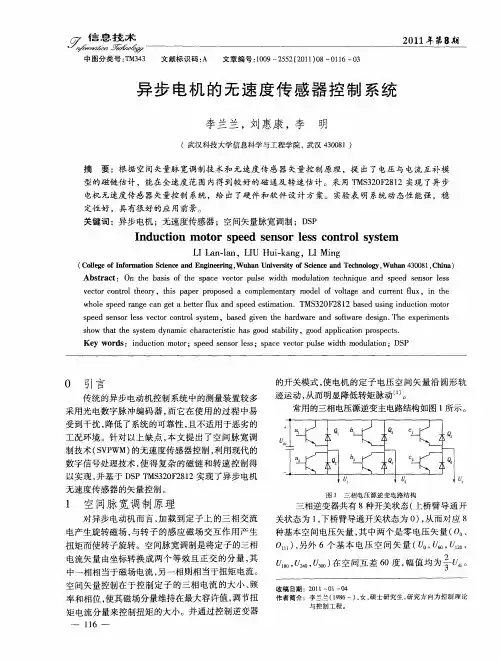
本文以电机控制专用芯片T M S320F240为核心,采用磁通、转速闭环的矢量控制策略,利用SVP WM 脉宽调制技术、无速度传感器及智能控制技术,设计了一电机控制系统。
仿真结果表明该控制系统抗干扰能力强,动态性能好。
2 速度估计策略模型参考自适应方法(MRAS)是应用较广的速度估计方法。
本文设计的模型参考自适应速度估计系统为减少定子电阻的影响选择瞬时无功功率模型,同时为有效解决瞬时无功功率模型参考40 异步电动机无速度传感器矢量控制系统设计《中小型电机》2005,32(2)自适应方法在转速辨识中存在的转速给定为负阶跃时转速不稳定[2]问题,将其原有的自适应机构用一个具有在线学习能力的模糊神经网络取代。
图1为模糊神经网络模型参考自适应速度估计器结构框图。
图中W ij 为模糊神经网络的权值,X^r 为转子电角速度估计值,C 表示/估计值0。
图1 模糊神经网络模型参考自适应速度估计器结构框图模糊神经网络模型参考自适应速度估计器的设计内容为:瞬时无功功率参考模型及可调模型的设计、模糊神经网络的设计。
参考模型不包含被估计参数,其输出作为期望值q ;可调模型包含被估计参数,其输出作为推算值。
期望值与推算值的误差项作为主要参数在在线训练时调节模糊神经网络的权值。
预先规定网络结构,通过学习系统的输入和输出,使要求的误差函数达到最小。
2.1 参考模型无功功率参考模型表达式为q =i s A v s B -i s B v s A -R L s (i s Ad i s B d t -i s B d i s Ad t)(1) 2.2 可调模型待估计的反电势表达式为e ^s A =L 2m L r d i m A d t =L 2mL r S r(-S r X^r i m B -i m A +i s A )(2)e^s B =L 2mL r d i m B d t =L 2mL r S r(-S r X ^r i m A -i m B +i s B )(3)e ^=e ^s A +j e ^s B(4)故待估计的无功功率表达式为q ^=i ^s @e ^=i s A e ^s B -i s B e ^s A(5)式中 L m )))定、转子互感L r )))转子电感i m A (B ))))励磁电流矢量在A B 两相静止坐标系下的分量S r )))转子时间常数,S r =L r /R rR )))漏磁系数,R =1-L m /L S L re ^表示估计反电势A 、B 两分量的组合矢量。
可调模型中含估计参数X ^r ,当估计转速与实际转速不一致时,两个模型的输出就会产生偏差信号E =i s @(e -e^)=q -q ^(6)2.3 模糊神经网络设计模糊神经网络内部结构如图2所示,图中W 11、W ij 、W nn 为模糊神经网络的权值;X ^rk -1为第K -1次运算得到的转子电角速度估计值;X ^rk 为第K 次运算的转子电角速度估计值。
模糊神经网络速度估计器学习算法如下:①初始化权值;②获得参考模型无功功率;③获得可调模型无功功率;④计算两模型输出误差;⑤调整权值;⑥计算网络输出;⑦从②开始重复。
图2 模糊神经网络内部结构3 系统结构及软硬件设计3.1 系统结构控制系统结构框图如图3。
图中X *r 为速度给定值,X ^r 为速度估计值。
整个系统采用交-直-交变压变频电路,主电路由不控整流桥、滤波电路、I P M 逆变电路组成。
控制电路以T M S320F240为核心,构成动态性能好、抗干扰能力强的矢量控制系统。
速度控制部分采用PI D 控制器。
本设计中采用TM S320F240替代传统51单片机来作为主控单元。
TM S320F240高速的中央处理单元(CP U )可以使数字系统设计者实时处理算法,与传统51系列单片机相比,具有计算速度快、精度高,内外部资源丰富、性价比好等优点。
系统中DSP 通过模型参考自适应方法(MRAS)辨识电机转速,根据各种保护信号和给定信息及估计转速给出相应的通断信号,实现数字PI D 调节和计算产生SVP WM 信号。
41《中小型电机》2005,32(2)异步电动机无速度传感器矢量控制系统设计图3 无速度传感器矢量控制系统结构框图3.2 硬件电路3.2.1 电流信号检测电路两相电流瞬时值经1B 1000的霍尔电流传感器LA25-NP 输入到DSP 的两个AD 转换器。
霍尔传感器的输出为有正负方向的弱电流信号,将该电流信号转换成电压信号,经运放将信号放大至-5~+5V 之间。
而T M S320F240的片内A /D 转换器的输入为0~+5V 的电压信号,因而需要电平偏移电路,将有正负极性的电压信号转换为F240A /D 转换器所需的单极性电压信号。
解决的方法是AD 输入端加2.5V 的偏移电平。
3.2.2 电压信号检测电路直流母线电压信号检测电路经霍尔电压传感器C HV-100输入到DSP 的AD 通道,将霍尔元件串一个电阻再并接到直流电压上,通过DSP 的片内A /D 检测霍尔元件感应的电流大小,来间接地反映直流侧电压。
3.2.3 I P M 智能功率模块及驱动电路选用智能功率模块P M 25RSB120,最高耐压1200V,额定电流25A,开关频率最高为20k H z 。
模块工作时需外部提供独立的驱动电源基极控制信号,六个I G B T 的基极驱动信号都是低电平有效的信号,与外部控制电路通过光电隔离器件I L P559隔离。
TLP559将DSP 输出的0~5V 的SVP WM 信号转换成0~15V 的驱动信号。
3.3 软件设计DSP 控制软件主要进行电机的起动控制、停机控制、被控电机参数的设置、转速信号的给定以及电机内部主要参量的图形化显示、异步电机高级控制算法的数字实现等。
控制算法的数字实现是控制系统的核心,是软件设计的重点。
DSP 程序采用定时中断、均匀采样形式的控制系统结构。
控制程序由三个模块组成:初始化模块、主菜单循环模块、定时器1下溢中断服务程序模块。
要实现的控制算法可插入到定时器1下溢中断程序中。
定时器1下溢中断程序流程图如图4。
图4 定时器1下溢中断程序流程图4 仿真实验用MATLAB 对所设计的系统进行了仿真。
仿真所用到的电机模型参数为:R s =1.238; R r =1.018;L s =(7.387+159.232)e -03H ;L r =(9.732+159.232)e -03H ;L m =159.232e-03H ; n p =2;J =0.001kg #m 2;B =0.002N #m #sec /rad 图5为给定转速900r/m i n 电机空载启动,在t=1.0s 时速度指令变为1200r /m i n 时的仿真波形(X *r 为给定值,X r 为测量值,X rhat 为估计值)。
由图(a )可见,空载时转子速度在t=0.25s 时系统已达到稳定状态,收敛于速度给定值;在t=1.0s 时,速度指令变为1200r/m i n ,系统的响应在t =1.15s 达到稳定。
由图(b )知,电机启动0.2s 后,速度估计的绝对误差小于10r /m i n ,估计的转速稳态精度较好。