基于模型预测控制的智能汽车目标路径跟踪方法研究
- 格式:pdf
- 大小:391.45 KB
- 文档页数:6

无人驾驶系统的车辆轨迹预测和跟踪无人驾驶技术的快速发展使得无人驾驶系统的车辆轨迹预测和跟踪成为了一个重要的研究领域。
车辆轨迹预测和跟踪是指通过分析车辆行驶的历史数据和环境信息,预测车辆未来的行驶轨迹,并对车辆进行实时跟踪和控制。
这项技术的发展有助于提高无人驾驶系统的安全性和稳定性,为实现自动驾驶提供了重要的支持。
一、车辆轨迹预测的方法车辆轨迹预测是无人驾驶系统中的重要环节,它通过分析车辆行驶的历史数据和环境信息,预测车辆未来的行驶轨迹。
目前,常用的车辆轨迹预测方法主要包括基于统计学的方法和基于机器学习的方法。
基于统计学的方法是通过对大量的历史数据进行统计分析,找出车辆行驶的规律和趋势,从而预测车辆未来的行驶轨迹。
这种方法的优点是简单直观,但是对于复杂的交通环境和车辆行驶状态的变化较为敏感,预测的准确性有限。
基于机器学习的方法是通过训练模型,学习车辆行驶的模式和规律,从而预测车辆未来的行驶轨迹。
这种方法的优点是能够适应复杂的交通环境和车辆行驶状态的变化,预测的准确性较高。
目前,常用的机器学习方法包括神经网络、支持向量机和随机森林等。
二、车辆轨迹跟踪的技术车辆轨迹跟踪是指通过分析车辆的实时数据和环境信息,实时监测和控制车辆的行驶轨迹。
车辆轨迹跟踪技术的发展有助于提高无人驾驶系统的安全性和稳定性。
车辆轨迹跟踪的关键技术包括传感器数据融合、运动估计和路径规划等。
传感器数据融合是指将来自不同传感器的数据进行融合,提高车辆行驶状态的感知能力。
运动估计是指通过分析车辆的实时数据和历史数据,估计车辆的运动状态和行驶轨迹。
路径规划是指根据车辆的当前状态和环境信息,规划合理的行驶路径,实现车辆的自动驾驶。
三、无人驾驶系统的挑战和前景虽然无人驾驶技术取得了长足的进步,但是仍然面临着许多挑战。
首先,无人驾驶系统需要具备高精度的环境感知能力,能够准确地识别和跟踪道路、障碍物和其他车辆等。
其次,无人驾驶系统需要具备高度的决策和控制能力,能够根据实时的环境信息和车辆状态,做出合理的决策和控制车辆的行驶。

Auto.En 鑰汽车工程师OVERVIEW 行业观察«重庆交通大学机电与汽车工程学院重庆市轨道交通汽车系统集成与控制重庆市重点^室摘要:路径跟踪作为自动驾驶汽车运动控制模块的基础部分,需要精确跟踪参考路径。
这也是近年来自动驾驶汽车研究的热点之一。
对路径跟踪运动控制进行了分类介绍,同时,系统地归纳总结了近年来自动驾驶汽车在复杂环境下精准跟踪路径并保持平稳性、安全性的最新研究方法。
此外,对路径跟踪控制方法在跟踪期望路径过程中尚存在的一些问题提出了建议,为自动驾驶领域提供了一定的参考和借鉴。
关键词:自动驾驶;路径跟踪;控制方法;线性二次最优控制方法Path Tracking Control for Autonomous Vehicle **基金项目:重庆市轨道交通车辆系统集成与控制重庆市重点试验室项目(CSTC215yfpt-zdsys30001)Abstract : As the basic part of the motion control module of autonomous vehicles, path tracking needs to accurately track thereference path. This is also one of the hot topics in the research of autonomous vehicles in recent years. The motion control ofpath tracking is classified and introduced. At the same time, the latest research methods of accurate path tracking and maintaining stability and safety of autonomous vehicles in complex environment in recent years are systematically summarized. In addition, some suggestions on the problems of the path tracking control method in the process of tracking the expected pathare put forward, which provide some reference for the field of automatic driving.Key words : Automatic driving; Path tracking; Control method; Linear quadratic optimal control method随着现代汽车工业和计算机技术的快速发展,人 们对自动驾驶汽车的智能化控制的要求越来越高。

2020年第8期【摘要】为了提高智能车在路径跟踪过程中的系统稳定性,基于李雅普诺夫(Lyapunov )稳定性理论设计了模型参考自适应路径跟踪控制器,并引入系统反馈补偿矩阵,化为线性二次最优控制(LQR )问题进行求解。
通过搭建CarSim/Simulink 联合仿真平台将控制器与传统模型预测控制器进行对比,设定速度与路面附着系数均不同的仿真工况,对比两种控制器的跟踪效果,仿真结果表明,该控制器具有良好的路径跟踪能力,并具有一定的鲁棒性。
主题词:路径跟踪稳定性LQR 自适应控制中图分类号:U463.6文献标识码:ADOI:10.19620/ki.1000-3703.20190589Design of Path Tracking Controller Based on Lyapunov Stability TheoryZheng Xin,Zhao Youqun(Nanjing University of Aeronautics and Astronautics,Nanjing 210016)【Abstract 】In order to improve the stability of the intelligent vehicle system in the process of path tracking,this paper designs a model reference adaptive path tracking controller based on the theory of Lyapunov stability control.By adding feedback matrix to make the system stable,Next,Solving the feedback Matrix by the method of LQR.Finally,co-simulation with different vehicle speeds and different road adhesion coefficient is carried out under the conditions of double lane change on the CarSim and MATLAB/Simulink platform.The results show that the controller can realize the path trackingaccurately and has certain robustness,which lays a theoretical foundation for the design of vehicle stability controller.Key words:Path tracking,Stability,LQR,Adaptive control郑鑫赵又群(南京航空航天大学,南京210016)*基金项目:陆军装备预研专用技术项目(30105190505);国家自然科学基金项目(11672127);南京航空航天大学教育教学改革研究项目(2019JG0259K )。
1.首先研究路径跟踪(参考机器人一些算法如:基于广义预测控制器的移动机器人路径控制算法、基于模糊逻辑推理的移动机器人导航控制算法、基于模糊神经网络的机器人导航控制算法等)思路一:(1)首先建立车辆按照预定路径行驶的控制系统模型(包括控制理论的选择、控制模型的数学推导和实现、控制模型的优化和总体方案实现)(2)利用SIMULINK建模仿真(包括:控制模型的仿真建模、作业环境的仿真建模、控制算法的程序实现)(3)按照要求设计各类仿真试验,并对控制模型进行仿真试验,依据试验结果进行完善调整直到仿真曲线满意为止(4)试验研究阶段(包括建立平台调试然后将调整后的控制算法移植到试验系统的控制算法程序中去,通过被控车辆的运动轨迹对该模型进行实物试验并依据结果对模型再进行调整直到结果满意为止)(5)分析结果总结。
(以上参考中南大学硕士论文深海集矿机的路径跟踪)2.路径跟踪中的误差如何消除?(在笛卡尔坐标空间中,采用误差矢量作为系统的反馈来快速消除跟踪误差。
参考南理工硕士论文——智能车辆体系结果及路径跟踪策略的研究)3.路径跟踪中的运动控制(分开环和闭环)开环策略就是试图寻找一个有界的控制输入序列来操纵系统使其从一个初始位形到任意的期望位形。
考虑非完整约束的智能车辆系统,是一个欠驱动的非完整系统,也是一个无漂移的零动力学系统。
此类系统不能用连续可微的时不变的纯状态反馈率来予以镇定。
因此,不连续控制、事变控制以及它们的混合策略就是必然的选择。
所以为其设计一个反馈控制规律,是目前非常活跃的研究领域。
4.由于高速公路的道路曲率变化较为缓慢,利用圆弧与直线的组合拟合目标路径。
(1)利用车载传感器测量时刻的三对道路预瞄点的坐标信息,根据所预测算法获得(K+1)T时刻道路预瞄点处坐标。
(2)根据最优控制理论,设计最优反馈控制器。
(3)最后仿真结果表明:基于所提路径预测法,最优反馈控制器能确保自主车实现跟踪性能。
(参考论文——基于路径预测的自主车最优跟踪控制)。

自动驾驶汽车的轨迹跟踪控制邵毅明; 陈亚伟; 束海波【期刊名称】《《重庆交通大学学报(自然科学版)》》【年(卷),期】2019(038)008【总页数】6页(P1-6)【关键词】车辆工程; 自动驾驶; 模型预测; 轨迹跟踪【作者】邵毅明; 陈亚伟; 束海波【作者单位】重庆交通大学交通运输学院重庆400074; 重庆交通大学机电与车辆工程学院重庆400074【正文语种】中文【中图分类】U469.79轨迹跟踪控制是实现车辆自动驾驶的基础。
目前大多数自动驾驶汽车的轨迹跟踪控制算法都是基于假设车辆在低速稳定工况下行驶的情况,没有考虑到高速行驶及地面附着力不足等状况[1-4]。
当高速行驶的车辆在紧急转向或低附着路面急速转弯时,轮胎附着力往往达到饱和,侧偏力接近附着极限,容易出现前轴侧滑失去转向能力或者后轴侧滑而甩尾的险情。
如果车辆在满足侧偏、滑移等动力学约束情况下,快速准确的沿期望轨迹行驶,则能避免此类险情的发生。
笔者针对现有轨迹跟踪控制器在车速较高时跟踪效果不理想这一问题,以车辆四自由度车辆动力学模型为基础,结合轮胎魔术公式和模型预测理论,考虑轮胎侧偏角对车辆稳定性的影响,设计了线性时变模型预测控制器,并基于该控制器进行了仿真分析。
仿真结果表明:该控制器在车速较高时仍能平稳准确地跟踪参考轨迹,具备一定的实际应用价值。
1 车辆动力学及轮胎模型1.1 车辆动力学模型在进行轨迹跟踪控制之前,首先要建立车辆的动力学模型。
车辆是一个复杂的非线性系统,在保证模型尽可能准确的同时,要对其进行适当简化,故在建立模型之前做如下假设[5-8]:1)假设车辆没有俯仰和侧倾运动;2)不考虑悬架垂直运动;3)忽略空气动力学影响;4)认为汽车行驶过程中轮胎特性及回正力矩不变。
根据以上假设,笔者将非线性的车辆动力学模型简化为能反映纵向速度、横向速度、横摆角速度及前轮转角的四自由度车辆模型,如图1。
图1 车辆四自由度模型Fig. 1 Vehicle four-degree-of-freedom model根据牛顿第二定律和力矩平衡公式,可得如下方程:(1)(2)F′x2-Fx3+Fx4)(3)惯性坐标系OXYZ中质心平面运动方程为:(4)(5)在车辆坐标系中沿x轴和y轴轮胎受到的纵向力Fxi和横向力Fyi,它们与轮胎侧偏力Fci及轮胎纵向力Fli之间存在一定关系,其关系式为Fxi=Flicos δ-Fcisin δ(6)Fyi=Flisin δ+Fcicos δ(6)由于轮胎侧偏力Fci和轮胎纵向力Fli与轮胎侧偏角αi、垂直载荷Fzi、路面摩擦系数ui、滑移率κi有关,可由多参数的函数表示:Fli=fl(αi,κi,ui,Fzi)(8)Fci=fc(αi,κi,ui,Fzi)(9)结合式(1)~(9),即可得车辆非线性动力学模型,其模型由如下微分方程表示为:(10)式中:为系统状态量,系统输入为u=[δf]。
城市环境基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法研究共3篇城市环境基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法研究1在自动驾驶技术的浪潮下,越来越多的汽车制造公司正在投入巨额资金进行研发,以获得市场竞争的优势。
而城市环境下的自动驾驶车辆正是该领域中的一个关键问题。
基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法的研究得到了越来越多的关注。
本文将就这个话题进行详细的阐述。
首先,城市环境下的自动驾驶车辆需要具备多目标检测及跟踪的能力,以保证其行驶安全。
在城市繁忙的路段和复杂的地形条件下,自动驾驶车辆需要高精度地探测前方所有的车辆、行人和障碍物等,以便根据这些信息做出适当的行动。
同时,自动驾驶车辆还需要能够实现跟踪目标物体的功能,以确保车辆的路径规划和控制的准确性。
其次,基于三维激光雷达的技术是实现这种多目标检测及跟踪的一种有效方式。
三维激光雷达能够获取具有高精度的点云数据,可以实现对目标物体的三维位置、形状和运动状态的准确检测和跟踪。
此外,三维激光雷达还可以获取一系列的地面特征信息,如路况和道路重建等,在城市环境下自动驾驶车辆的行驶过程中起到至关重要的作用。
第三,基于三维激光雷达的多目标检测及跟踪算法是实现城市环境下自动驾驶车辆的一个关键环节。
对于一个自动驾驶车辆而言,如何在复杂的城市环境下,高效地检测和跟踪多个目标物体是一个具有挑战性的任务。
在这个任务中,有很多复杂的因素需要考虑,如多个目标物体之间的交叉轨迹、不同目标物体之间的尺度差异和位置变化等。
为了解决这些问题,研究人员提出了许多基于三维激光雷达的多目标检测及跟踪算法。
其中一些算法使用了深度学习技术,如卷积神经网络和目标检测网络,以实现更高精度的检测和跟踪。
同时,一些算法采用了模型预测方法,通过建立模型,来对目标物体的运动状态进行预测。
这些算法在提高自动驾驶车辆检测和跟踪精度的同时,也提高了车辆的控制效率和安全性。
最后,需要注意的是,基于三维激光雷达的多目标检测及跟踪算法仍然存在一些问题和挑战。
基于模型预测控制技术的电动汽车能量管理研究1. 电动汽车能量管理的重要性近年来,随着环境污染问题的日益突出,电动汽车逐渐成为了解决交通能源问题的重要方向。
相比于传统燃油汽车,电动汽车具有零排放、低噪音、低维护成本等优点,越来越受到人们的青睐。
但是,由于电池能量密度和续航里程的限制,电动汽车的能量管理问题十分复杂。
如何在不牺牲性能和安全的前提下有效管理电池能量,延长续航里程,一直是电动汽车研究的重要问题。
2. 基于模型预测控制技术的电动汽车能量管理随着控制理论和计算机技术的发展,基于模型预测控制(MPC)技术的电动汽车能量管理成为了当前研究的重点。
MPC技术是目前最为先进的控制策略之一,主要思想是通过建立车辆动力学模型和电池模型,预测电池的状态和路况,并根据预测结果制定最优的能量管理策略,从而控制电池的充放电过程。
MPC技术的优点在于可以确保系统的安全性和稳定性,同时最大限度地延长电池寿命,提高电池能量利用率,从而实现电动汽车的优化控制。
通过MPC技术,电池能量管理可以更加精细化、高效化地进行,可以针对不同的路况和行驶需求,实现个性化的能量管理策略,进一步提高电动汽车的使用便捷性和性能表现。
3. MPC技术在电动汽车能量管理中的应用目前,MPC技术已经在电动汽车能量管理中得到了广泛应用。
其中,最基本的应用是对电池的充放电过程进行预测和控制,通过实时监测和优化控制,来延长电池寿命和提高能量利用效率。
此外,MPC技术还可以结合导航和车速等信息,对车辆行驶路线进行智能规划和能量管理,实现最优的能源分配和节能减排。
MPC技术在电动汽车能量管理中的应用还可以与其他技术相结合,形成更加完备的能量管理系统。
例如,可以结合智能充电技术,在电动汽车空闲时自动进行充电和优化管理,减少能量浪费和提高电池寿命;也可以结合能量回收技术,在制动过程中将能量回收并存储在电池中,从而实现最大程度的能量利用。
4. MPC技术在未来电动汽车能量管理中的发展未来,MPC技术在电动汽车能量管理中的应用还有很大的发展空间。
自主车辆前馈NMPC路径跟踪控制方法研究
刘凯;李浩然;许述财;孙川;郑四发;严运兵
【期刊名称】《重庆理工大学学报(自然科学)》
【年(卷),期】2024(38)5
【摘要】在弯道等大曲率场景中,车辆转向系统的迟滞和车辆模型的线性化会导致转向不足和稳态误差,从而影响自主车辆路径跟踪精度和响应速度。
为了解决这一
问题,提出了一种路径跟踪框架。
该框架在弯道等大曲率场景,触发前馈控制控制器,输出理想转角序列,提前使转向机构到达最优转角附近;随后将引入排斥目标函数的
非线性模型预测控制器优化求解出的最优控制序列作用于车辆,刷新理想转角序列。
搭建自主车辆实验平台,在不同场景下进行仿真验证,结果表明,与忽略滞后的传统模型预测控制相比,前馈非线性模型预测控制器跟踪精度和响应速度方面的性能有所
提高。
特别是在弯道等大曲率场景中,所提出的框架将横向均方根误差降低了近30%。
【总页数】12页(P18-29)
【作者】刘凯;李浩然;许述财;孙川;郑四发;严运兵
【作者单位】武汉科技大学汽车与交通工程学院;清华大学苏州汽车研究院(相城);
清华大学车辆与运载学院;香港理工大学土木及环境工程学系
【正文语种】中文
【中图分类】U467
【相关文献】
1.自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制
2.自适应积分终端滑模的自主车辆路径跟踪控制
3.基于结构化道路与NMPC的无人车路径跟踪控制
4.基于自适应预瞄前馈控制的智能车辆路径跟踪研究
5.基于前馈-反馈的变权重路径跟踪控制方法
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车技术・Automobile Technology 基于模型预测控制的智能汽车目标路径 跟踪方法研究★
段建民 田晓生夏天宋志雪 (北京工业大学,北京100022)
【摘要】为避免智能汽车在目标路径跟踪过程中发生侧滑,改善自动驾驶性能,通过改进目标函数、增加轮胎侧偏角动 力学约束,以车辆动力学模型作为模型预测控制的预测模型,提出了一种改进的智能汽车目标路径跟踪方法。在CarSim与 MATLAB/Simulink联合仿真平台对该方法进行了验证,结果表明,该方法有效地降低了智能汽车跟踪目标路径时发生侧滑 的几率,提高了智能汽车目标路径跟踪的准确性和安全性。 主题词:智能汽车 目标路径跟踪CarSim/Simulink联合仿真模型预测控制 中图分类号:U467.1文献标识码:A文章编号:1000—3703(2017)08—0006—06 Research on Target Path Tracking Method of Intelligent Vehicle Based on Model Predictive Control Duan Jianmin,Tian Xiaosheng,Xia Tian,Song Zhixue (Beijing University of Technology,Beijing 100022) 【Abstract】To avoid the occu ̄ence of vehicles’side—slip and improve the performance of automatic drive during target path tracking,an improved intelligent vehicle target path tracking method was proposed.In this proposed method,the vehicle dynamics model was used as the predictive control model,the objective function was improved and the dynamic constraint of the tire slip angle was added.This proposed method was validated on the CO—simulation platform constructed by CarSim and MATLAB/Simulink.The results show that the proposed method can reduce the probability of side—slip during target path tracking,and improve the tracking accuracy and safety of the intelligent vehicle target path tracking. Key words:Intelligent vehicle,Target path tracking,CarSim/Simulink co—simulation,Model
predictive control ,
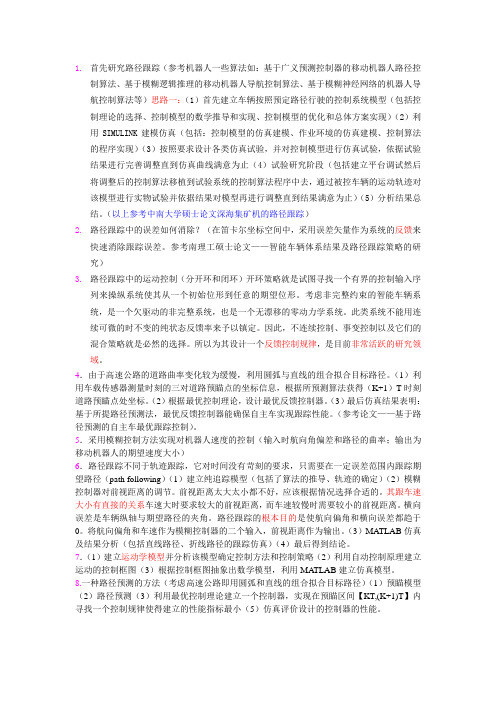
1前言 路径跟踪指无人驾驶车辆沿着设定的路径安全、稳 定、准确地行驶,其性能直接影响智能车自主行驶的能 力fq。早期的路径跟踪控制方法(如纯跟踪算法Pure pursuitm、环形预瞄法Circular Look—Ahead 等)使用几何 方法进行路径跟踪,但不同于以往的四轮机器人,车辆 由于尺寸较大,受最小转弯半径、最大角速度等动力学 条件的约束(41,传统的基于几何的路径跟踪方法并不能 很好地解决车辆的这些约束问题。 基于模型预测控制的路径跟踪控制算法已在国内 外得到了广泛应用,文献『41依据被控对象的运动学模 型,对系统状态量的偏差和控制量进行优化,该方法虽 简单实用,但无法对每个采样周期内的控制增量进行限 制,无法避免被控系统状态量发生突变。文献[5]对该 系统的空间方程进行了转换,实现了对控制增量的约 束,但仍采用车辆运动学模型,不能对车辆动力学指标 进行约束,无法满足车辆的安全行驶要求。文献【6】提 出了基于线性时变动力学模型预测控制的路径跟踪算 法,但并未考虑到车辆在高速行驶时的稳定性问题,只 对状态量进行约束,没有对车辆进行动力学约束。 本文针对以上路径跟踪研究中存在的问题,以车辆 动力学模型作为预测模型,充分发挥模型预测控制解决 多约束问题的优点,通过改进优化目标函数减少优化目 基金项目:北京市属高等学校人才强教计划资助项目(038000543117004)。 一6一 汽车技术 段建民,等:基于模型预测控制的智能汽车目标路径跟踪方法研究 标的数量来提高控制算法的实时l生,通过加入车轮侧偏 角的动力学约束来提高智能车跟踪目标路径时的平稳 性和安全性。 2车辆动力学模型及其线性化 2.1车辆动力学模型 本文用车辆四轮模型来分析车辆在运动过程中的 受力情况 】,为简化计算,假设车辆在水平路面上行驶, 不考虑横向和纵向空气阻力。满足以上条件的车辆动 力学模型如图1所示,其中,oxy为车体坐标系,规定 轴 正向为车头方向, 轴为车体横向,OXY为大地坐标系。
图1车辆动力学模型 根据牛顿第二定律,分别得到沿 轴、 y轴和绕Z轴
的受力平衡方程: =m +2Fx +2 (1) my=一, +2F +2F (2) ‘i5=2a ~2bF (3) 式中,a-.b分别为质心到前、后轴的距离;m为车辆的质 量;L为车辆绕z轴的转动惯量; 为车辆航向角;F 、
式中, ( )=眠0fdyn :
% ( )=  ̄fdy n :
一2(C +C ,) mSc . 2C f6“1】 一— 一 ¨“~. 0 2(bC 一aC ) Ifi COS -sin F 为车辆前、后车轮受到的 方向的力; 、n为车辆 前、后车轮受到的Y方向的力。 经过简化整理,可以得到较小前轮偏角假设下的车 辆动力学非线性模型: 一耐2 一 ] 一2 (6_ +c-r ㈩ 2 ̄ccfl )] y=戈sin + COS X= COS 一 sin 式中, 、G 分别为车辆前、后轮侧偏刚度; 、c『 分别 为车辆前、后轮轮胎纵向刚度; 为前轮偏角;s 分别 为前、后轮滑移率; 、】,分别为惯性坐标系坐标下车辆 坐标。 2.2模型线性化 由于智能车在高速行驶过程中对车辆运动控制器 实时性要求很高,非线性模型预测控制难以满足,因此, 在参考点进行泰勒展开并只保留一阶项,将车辆的动力 学模型线性化。 对式(4)所建立的非线性动力学模型 如= ( “a )进行线性化,其中,状态量 如=( ,圣, , ,y, ) ,控制量 dyn ,得到线性时变方程为: =A ( ) t)+曰 ( )udy ( ) (5) 0 0 0 0 I COS t—Y sin I 一 COS 一莺t sin 2 ( 一 ) ] 。 。。lo J 2.3状态空间方程转换 线性化得到的空间状态方程中,Udyn( )是车辆的控 制量,以这种形式的空间状态方程得到的预测方程并不 能对车辆控制量的增量进行有效的约束,因此还需要对 2017年第8期 .+—2(bCo,—-aC ̄f)-Xt 0 —— _u
矿,一—2aC—cf_
 ̄f
,t-t 0 一—
二 ! 1 0 Ifi 0 0
上一节线性化后的空间状态方程进行进一步转换。 本文取状态变量
1 t I㈦ 1“dvn【 一,Jl
一,7一
一跳 一 0 一跳. S 段建民,等:基于模型预测控制的智能汽车目标路径跟踪方法研究 结合式(5)和式(6),可以得到新的状态空间方程: ( +1,t):A ( ,t)+B △u( ,t) (7)
她 = 系统状态 量数量 7为系统控制量数量;AU为控制增量;I 为i阶 单位矩阵。
3模型预测控制器 模型预测控制器作为车辆路径跟踪的决策机构,通 过状态采集器获取上一时刻车辆状态,通过预测模型对 车辆预测时域内的状态进行预测,构建二次型目标函数, 并结合约束条件,优化求解得到控制时域内各个周期的 控制量,最后将控制序列的第一个元素作用于车辆,在下 一个采样时刻重新获取车辆的状态,继续进行下一轮的 滚动优化-s]。智能车模型预测控制原理如图2所示。 图2模型预测控制原理 3.1目标函数设计 在智能车的目标路径跟踪中,目标函数的作用是使 其准确、快速地跟随目标路径。因此,目标函数必须包 含系统的状态量和控制量。参考文献[4】,目标函数为: .,( ) 州吼( (8) M (后+j-1)Ru(k+’『一1) 式中, 为状态量;p为状态加权矩阵;Ⅱ为输入控制 量;R为控制加权矩阵;P为预测时域。 该形式的目标函数使用系统状态量和控制量进行 优化求解,当系统使用动力学空间状态模型时,由于约 束量较多,会导致系统计算时间成本过高,而直接使用 系统控制量来进行约束也会导致无法对控制增量进行 有效约束 1。因此,本文采用的模型预测控制器目标函 数为: ):到‰(后+J-I )一 + + j =1 (9) (州 : 式中, 为输出量; ’ref为输出量参考量;Audyn为控制 偏差增量;p为松弛因子权重系数;Ⅳ为控制时域。 一8一 , 由于使用的是车辆动力学模型,并且增加了约束条 件的数量,为了避免无最优解情况的出现,为目标函数 添加了松弛因子 。 结合式(7)和式(9),消除系统状态量 ( , )可得: .,( )= ( ) ,s] ( 卜G ( ) , ](10) 式中, ̄Xu(t)为控制增量; 为状态加权矩阵;G 为控 制加权矩阵。 3.2条件约束 模型预测控制最突出的特点就是能很方便地处理 多约束问题u”,为了保证智能车平稳地跟踪目标路径, 本文采用前轮偏角约束、前轮偏角增量约束以及轮胎侧 偏角动力学约束。 3.2.1前轮偏角及其增量约束 对于车辆的前轮偏角和前轮偏角增量的约束,可以 根据车辆的实际物理参数进行设置。控制量约束表达 式为: Umin( + )<u(k+f)<“ ( + ), =0,1,…,N一1(11) 控制增量约束的表达式为: △u (克+t)<△u( +t)<△u ( +£),k=0,1,…,N一1(12) 在目标函数以及约束条件中,被优化变量为控制时 域内的控制增量,因此,控制量要首先转化为△“的矩 阵形式。 由控制增量和控制量的关系可得: H(£+1)=Au(t)+M(£) u(t+2):△uO+1)+“( +1)=Att(t+1)+Au(t)+¨( ) O+3)=△“0+2)+ +2)=△u0+2)+△“ +1)+zx“( )+“(#)(13)