结晶器正弦振动装置的形式及其特点
- 格式:doc
- 大小:163.50 KB
- 文档页数:14
连铸工程及监理要点一、连铸工艺简介连续铸锭就是将电炉或转炉冶炼出的钢水连续铸造成为方坯、圆坯或板坯的生产过程,连铸的产品是将各类坯料提供给后面的轧钢厂作为轧制线材、钢管、板材或带材的原料。
因此,连铸是炼钢生产的后道工序,也是炼钢和轧钢之间的过渡工序。
连铸工艺技术经过几十年的发展,至今达到了比较完善而先进的水平,使连铸生产的形式、规格、能力都得到充分发挥。
就连铸的产品种类来说,常见的有多流小方坯连铸(三流、五流、六流的160×160、150×150等)、多流圆坯连铸(Ф160、Ф140等)、大方坯连铸(280×280、230×280等)、板坯连铸(宽度1450、1750、1930、2300、3200、3600等,厚度200、210、230、250、300的板坯)等。
连铸机的形式也有多种,如某大型钢厂在线有5条连铸生产线:1#连铸机为两机4流立弯式弧型连铸机,生产1930mm及以下宽度、厚度210、230和250mm、长度6-12m板坯,设计年生产能力为400万吨;2#连铸机为两机4流立弯式弧型连铸机,生产宽度为1450mm及以下、厚度210、230和250mm、长度6-12m板坯;3#连铸机为一机两流垂直弯曲型(直弧形)板坯连铸机,生产的板坯宽度为2300mm及以下、厚230、250、300mm、长度依据需要可为4-8m。
年生产能力为230万吨。
4#连铸机为一机两流(直弧形)板坯连铸机,生产宽度为1780mm及以下、厚度210、230、250mm的板坯。
该厂还有六流小方(圆)坯连铸机,生产160×160方坯和Ф160圆坯。
还有在建的大方坯连铸机(断面尺寸280×230)。
现在国内外绝大多数的钢厂都建有连铸生产线并力求达到或接近达到“全连铸”——全部钢水都进入连铸成坯,即钢水不再用“模铸”法铸坯,除非为生产某类特定产品或专门用途,如某些铸锻厂为了锻造大长轴,必须单件模铸数十吨重的大钢锭。
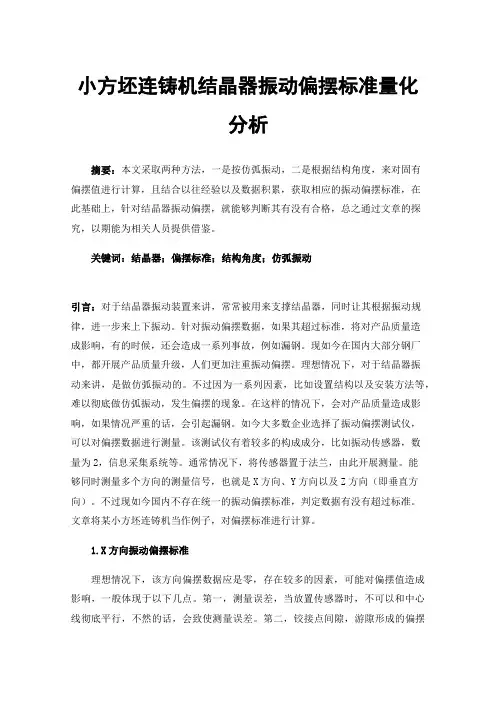
小方坯连铸机结晶器振动偏摆标准量化分析摘要:本文采取两种方法,一是按仿弧振动,二是根据结构角度,来对固有偏摆值进行计算,且结合以往经验以及数据积累,获取相应的振动偏摆标准,在此基础上,针对结晶器振动偏摆,就能够判断其有没有合格,总之通过文章的探究,以期能为相关人员提供借鉴。
关键词:结晶器;偏摆标准;结构角度;仿弧振动引言:对于结晶器振动装置来讲,常常被用来支撑结晶器,同时让其根据振动规律,进一步来上下振动。
针对振动偏摆数据,如果其超过标准,将对产品质量造成影响,有的时候,还会造成一系列事故,例如漏钢。
现如今在国内大部分钢厂中,都开展产品质量升级,人们更加注重振动偏摆。
理想情况下,对于结晶器振动来讲,是做仿弧振动的。
不过因为一系列因素,比如设置结构以及安装方法等,难以彻底做仿弧振动,发生偏摆的现象。
在这样的情况下,会对产品质量造成影响,如果情况严重的话,会引起漏钢。
如今大多数企业选择了振动偏摆测试仪,可以对偏摆数据进行测量。
该测试仪有着较多的构成成分,比如振动传感器,数量为2,信息采集系统等。
通常情况下,将传感器置于法兰,由此开展测量。
能够同时测量多个方向的测量信号,也就是X方向、Y方向以及Z方向(即垂直方向)。
不过现如今国内不存在统一的振动偏摆标准,判定数据有没有超过标准。
文章将某小方坯连铸机当作例子,对偏摆标准进行计算。
1.X方向振动偏摆标准理想情况下,该方向偏摆数据应是零,存在较多的因素,可能对偏摆值造成影响,一般体现于以下几点。
第一,测量误差,当放置传感器时,不可以和中心线彻底平行,不然的话,会致使测量误差。
第二,铰接点间隙,游隙形成的偏摆误差。
第三个常见因素是:振动台结构刚度[1]。
结合以往经验与数据积累,用X 来表示这一方向的偏摆标准,数值不超过200微米。
2.Y方向振动偏摆标准由于传感器置于法兰,来开展测量,会让该方向形成固有偏摆值。
也就是理想状况下,该方向偏摆数据,存在固有偏摆值。

oslo结晶器和fc结晶器原理Oslo结晶器和FC结晶器原理引言:结晶器是一种用于实现物质结晶过程的设备。
在化学、冶金、生物、材料等领域中,结晶过程被广泛应用于纯化、提纯、晶体生长和材料制备等方面。
本文将介绍两种常见的结晶器——Oslo结晶器和FC结晶器,分别探讨其工作原理和应用特点。
一、Oslo结晶器的原理Oslo结晶器是一种常用的连续结晶设备,其原理基于湿式结晶的过程。
它主要包括稳定器、冷却器、搅拌器和收集器等部分。
Oslo结晶器通过控制温度、溶液浓度和搅拌速度等参数,使溶液中的溶质逐渐凝结成晶体。
Oslo结晶器的工作原理可概括为以下几个步骤:1. 溶液进入稳定器:溶液首先进入稳定器,通过稳定器中的调节装置控制温度和浓度,以保持溶液在稳定的状态。
2. 溶液进入冷却器:稳定的溶液随后进入冷却器,在冷却器中通过降低溶液温度,使溶质逐渐达到过饱和状态。
3. 溶液进入搅拌器:过饱和的溶液进入搅拌器,通过搅拌器中的机械搅拌或气体搅拌等方式,引入扰动,促进晶体的形核和生长。
4. 溶液进入收集器:晶体在搅拌器中逐渐生长,随着溶液流动,晶体被带到收集器中,从而实现结晶过程。
Oslo结晶器的特点:1. 高效连续:Oslo结晶器能够实现高效连续的结晶过程,大大提高了生产效率。
2. 粒度可控:通过调节温度、浓度和搅拌速度等参数,可以控制晶体的粒度和形状,满足不同需求。
3. 适用范围广:Oslo结晶器适用于各种溶液的结晶过程,具有较广泛的应用领域。
二、FC结晶器的原理FC结晶器是一种常见的批式结晶设备,其原理基于气体扩散结晶的过程。
它主要包括反应器、冷却器和收集器等部分。
FC结晶器通过控制温度、压力和流速等参数,使气体中的溶质逐渐凝结成晶体。
FC结晶器的工作原理可概括为以下几个步骤:1. 溶液进入反应器:溶液首先进入反应器,通过加热使其达到过饱和状态。
2. 过饱和气体进入冷却器:过饱和的气体进入冷却器,通过降低温度,使气体中的溶质逐渐凝结成晶体。

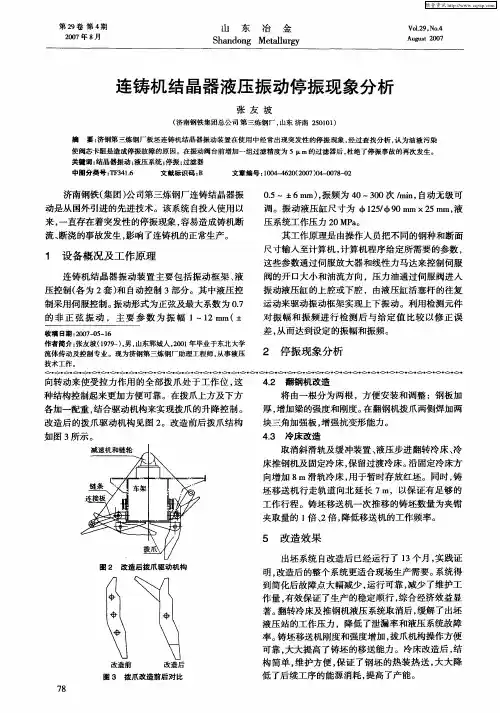
摘要结晶器是钢坯连续铸造的关键设备,其设计和制造的优劣直接影响到连铸生产的正常与稳定。
本文就目前连铸结晶器采用的铜板材料及铜板材料表面处理技术的发展现状进行了总结和分析。
指出针对板坯结晶器窄面铜板易高温变形、磨损的情况,采用高强度、高导热率的弥散强化铜材料,进而延长结晶器的维修周期,提高生产效率。
同时针对现有结晶器铜板表面改性技术的优缺点,发展新型合金涂、镀层技术,进一步提高涂、镀层的硬度,耐磨和耐腐蚀性能。
目前结晶器铜板表面处理的几种方法:电镀法、热喷涂法、化学热处理法以及具有潜在发展前景的激光熔覆法。
激光熔覆法由于具有清洁无污染,成品率高以及性价比高等特点,具有广阔的发展和应用空间。
而且,通过优化熔覆工艺参数,设计合理的熔覆材料体系,能够形成与铜板呈冶金结合的优良抗热耐磨复合涂层,从而显著提高结晶器的使用寿命。
关键词:结晶器;化学热处理;激光熔覆;铜板AbstractThe progress of mould plates was reviewed in continuous casting. The techniques such a solution or aging or forming or fine crystal and their combination were an effect tiveme thod which benefit for high conductivity and high strengthen of copper base alloy. Copper base composite maerial through dispersion technique and composite hardening and surface strengthening have more promising for mouldes in the future.Based on the current study stat of surface strength ening on copper crystallizer, several surface treatment means,such as electro plating thermal spraying,penetration and laserclad dingte chnique with potential development are described. Because of cleanliness without any pollution, high finished product ratio and high performance costratio, laser cladding has wide development and application range. Moreover, by optimizing process parameters and designing suitable material system, fine hea-t resistant and wear-resistant coating having metallurgy bonding with copper substrate can be fabricated, therefore, it may notably improve the service life of copper crystallizer.Key words:Copper crystallizer; Electroplating; Thermal Chemical heat treatme;Copper plate目录摘要 (I)Abstract (II)第1章绪论 (1)1.1连扎连铸简介 (1)1.2工艺流程 (3)1.3板坯连铸机质量优势 (4)1.4研究背景 (5)1.5国内外状况 (6)1.6结晶器概述 (7)1.7结晶器存在的问题 (9)1.8结晶器使用前的安全检查 (9)1.9本章小结 (10)第2章结晶器夹紧装置的选择计算 (11)2.1结晶器夹紧装置简介 (11)2.2结晶器夹紧受力分析及计算选择 (12)2.3结晶器宽边调整机构的安装 (14)2.4本章小结 (14)第3章结晶器调宽装置的选择计算 (15)3.1调宽装置简介 (15)3.2调宽装置的确定和基本参数的选择 (16)3.3调宽装置驱动选择 (18)3.4窄边调整机构的安装 (18)3.5本章小结 (19)第4章结晶器铜板及水箱的选择计算 (20)4.1结晶器铜板的设计 (20)4.1.1结晶器长度的选择 (20)4.1.2结晶器断面尺寸和倒锥度 (22)4.1.3结晶器铜板材质及表面镀层的选择 (23)4.1.4铜板厚度计算 (24)4.2水箱设计 (25)4.3本章小结 (26)第五章结晶器振动装置的应用和发展 (27)5.1振动装置的概述 (27)5.2结晶器的振动方式 (27)5.3总结 (30)5.4本章小结 (31)结论 (32)参考文献 (33)致谢 (35)第1章绪论1.1连扎连铸简介连铸连轧全称连续铸造连续轧制(Continue Casting Direct Rolling,简称CCDR),是把液态钢倒入连铸机中轧制出钢坯(称为连铸坯),然后不经冷却,在均热炉中保温一定时间后直接进入热连轧机组中轧制成型的钢铁轧制工艺。
石英晶体谐振器From:欧阳联铂石英晶体振荡器是高精度和高稳定度的振荡器,被广泛应用于彩电、计算机、遥控器等各类振荡电路中,以及通信系统中用于频率发生器、为数据处理设备产生时钟信号和为特定系统提供基准信号。
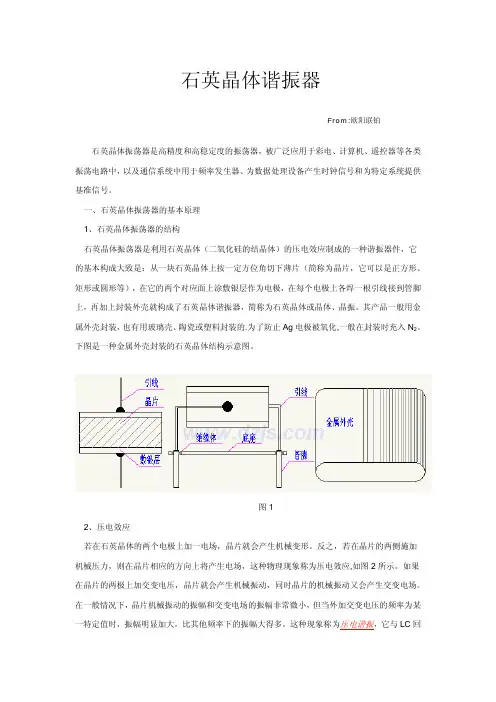
一、石英晶体振荡器的基本原理1、石英晶体振荡器的结构石英晶体振荡器是利用石英晶体(二氧化硅的结晶体)的压电效应制成的一种谐振器件,它的基本构成大致是:从一块石英晶体上按一定方位角切下薄片(简称为晶片,它可以是正方形、矩形或圆形等),在它的两个对应面上涂敷银层作为电极,在每个电极上各焊一根引线接到管脚上,再加上封装外壳就构成了石英晶体谐振器,简称为石英晶体或晶体、晶振。
其产品一般用金属外壳封装,也有用玻璃壳、陶瓷或塑料封装的.为了防止Ag电极被氧化,一般在封装时充入N2。
下图是一种金属外壳封装的石英晶体结构示意图。
图12、压电效应若在石英晶体的两个电极上加一电场,晶片就会产生机械变形。
反之,若在晶片的两侧施加机械压力,则在晶片相应的方向上将产生电场,这种物理现象称为压电效应,如图2所示。
如果在晶片的两极上加交变电压,晶片就会产生机械振动,同时晶片的机械振动又会产生交变电场。
在一般情况下,晶片机械振动的振幅和交变电场的振幅非常微小,但当外加交变电压的频率为某一特定值时,振幅明显加大,比其他频率下的振幅大得多,这种现象称为压电谐振,它与LC回路的谐振现象十分相似。
它的谐振频率与晶片的切割方式、几何形状、尺寸等有关。
图23、符号和等效电路石英晶体谐振器的符号和等效电路如图3所示。
当晶体不振动时,可把它看成一个平板电容器称为静电电容C,它的大小与晶片的几何尺寸、电极面积有关,一般约几个PF到几十PF。
当晶体振荡时,机械振动的惯性可用电感L来等效。
一般L的值为几十mH 到几百mH。
晶片的弹性可用电容C来等效,C的值很小,一般只有0.0002~0.1pF。
晶片振动时因摩擦而造成的损耗用R来等效(与晶片表面光滑度成反比,粗糙平整度影响R值,它决定了晶振80%的品质),它的数值约为100Ω。
1.绪论1-2通常连铸机分哪几种类型?简述弧形连铸机和椭圆形连铸机特点。
答:通常分为立式、立弯式、弧形、椭圆形、水平式连铸机。
弧形连铸机特点:①采用弧形结晶器,在结晶器内形成弧形铸坯 ②使用弧形二次冷却装置,在水平切点处矫直铸坯 ③主机高度大大降低,但是铸机的弧形部件加工、制造、安装、调试、维修困难 ④铸坯在弧形不对称的状态下冷却不均匀椭圆式连铸机特点:①弧形结晶可倾斜安装,用逐渐增大圆弧半径的方法进行矫直,铸坯可沿水平方向拉出 ②铸坯不需要进行大量的弯曲或矫直,钢液的静压小,铸坯的鼓肚缺陷减少 ③夹杂上浮的机会减少,铸机机身高度大大降低1-3 弧形连铸机主体设备包括哪些?简述其工艺流程?答:包括钢包运载装置,中间包,中间包车,结晶器,结晶器振动装置,二次冷却装置,拉坯矫直装置,铸坯运出装置等。
工艺流程:钢液通过钢包运送到连铸机上方,经钢包底部水口流入到中间包,打开中间包中滑动水口,钢液流入结晶器中,待钢液在结晶器周边凝固成坯壳,且结晶器下端出口处坯壳有一定厚度,启动拉坯矫直机和结晶器振动装置,带有液心的铸坯通过弧形导向段一边下行一边经受二次冷却区强制冷却,继续凝固。
当引锭杆出拉坯矫直机后将其与铸坯脱离,铸坯在全部凝固或由液心状态下被矫直。
待铸坯被矫直且完全凝固后,由切割机切割成定尺长度。
2.连铸机设备2-1 弧形连铸机规格如何表示?什么是连铸机机数,台数,流数?答: 连铸机规格表示方法:aRb —c如3R5.25—240:表示此台连铸机为3机,弧形半径为5.25米,拉坯辊身长度为240mm .台数:凡是共用一个钢包同时浇铸一流或者多流铸坯的一套连铸设备,称为一台连铸机。
机数:具有独立的传动系统和工作系统,当其他机组出现故障仍然可以照常工作的一组设备称为一个机组。
流数:每台连铸机能够同时浇铸铸坯的总根数称为连铸机的流数。
2-2弧形连铸机的圆弧半径如何表示,液相深度与冶金长度有何关系?答:弧形连铸机的圆弧半径R 值铸坯外弧曲率半径,可用经验公式确定基本圆弧半径,也是连铸机最小圆弧半径:R ≥cD 式中D 为铸坯厚度,c 为系数冶金长度是根据最大铸坯厚度、最大拉速确定的液相深度。
OSLO结晶器在工业上获得较广泛的应用,主要应用于味精、冶金、水产物加工、软水制造等。
OSLO结晶器为过饱和度产生的区域与晶体生长区分别设置在结晶器的两处,晶体在循环母液中流化悬浮,为晶体生长提供一个良好的条件。
OSLO结晶器厂家,江苏瑞达科技给大家介绍一下OSLO结晶器的结构型式及设计特点。
①育晶器底部为园弧形,这就改善了料液在育晶器内的流动状态,不致于形成死区;②育晶器上部扩大的断面可以使盐晶沉降下来,不参与循环,减少了二次成核的机会;③料液从蒸发室下部进料,上部管出料,减少了短路温差损失,同时料液在蒸发室内上升的过程中还有一个微粒溶解过程,料液由不饱和变成饱和,可以减少细晶的数量,从而保证盐的粒度;④设计时育晶器上锥部设置了母液排放管,它既可以排母液控制罐内Na2 SO4 含量,也可以将一些微细的盐晶排出系统,以保持罐内晶核相对稳定,有利盐粒长大;⑤在设计时还考虑了每次刷罐时保留育晶器内料液的刷罐方式,既只刷加热室,这样可避免育晶罐内大粒盐的损失,而且刷罐后恢复生产出合格盐的时间也可以缩短。
⑥循环泵电机采用可调电机,通过调节电机转速来调节循环泵流量,从而调节循环清液中盐晶粒径和排出系统的结晶数量;OSLO是制盐行业中常用的一种典型的结晶器。
其特点是溶液从结晶器上部流出,进入强制循环泵,通过可使溶液产生过饱和度的装置后进入结晶器降液管,逐渐形成结晶,长大后的结晶沉于结晶器底部,取出为产品。
在物料循环过程中,多采用清母液循环,晶体不参加循环因此不易被破碎,结晶自结晶器中部取出不受沉降限制,晶体生长环境好,所以晶体粒径大,可达6-20目,即3mm大。
结晶器内不需要搅拌。
江苏瑞达环保科技有限公司是一家以技术研发为先导的高科技环保公司,致力于为客户提供清洁生产、“三废”治理、资源综合利用等方面的技术咨询、研发、设计及工程总承包服务。
公司成立于2011年,厂区占地面积320000㎡,总注册资金16800万元。
石英晶体谐振器原理特点和参数石英晶体振荡器的基本工作原理及作用(1)石英晶体振荡器(简称晶振)的结构石英晶体振荡器是利用石英晶体(二氧化矽的结晶体)的压电效应制成的一种谐振器件,它的基本构成大致是:从一块石英晶体上按一定方位角切下薄片(简称为晶片,它可以是正方形、矩形或圆形等),在它的两个对应面上涂敷银层作为电极,在每个电极上各焊一根引线接到管脚上,再加上封装外壳就构成了石英晶体谐振器,简称为石英晶体或晶体、晶振。
其产品一般用金属外壳封装,也有用玻璃壳、陶瓷或塑胶封装的。
(2)压电效应若在石英晶体的两个电极上加一电场,晶片就会产生机械变形。
反之,若在晶片的两侧施加机械压力,则在晶片相应的方向上将产生电场,这种物理现象称为压电效应。
如果在晶片的两极上加交变电压,晶片就会产生机械振动,同时晶片的机械振动又会产生交变电场。
在一般情况下,晶片机械振动的振幅和交变电场的振幅非常微小,但当外加交变电压的频率为某一特定值时,振幅明显加大,比其他频率下的振幅大得多,这种现象称为压电谐振,它与LC回路的谐振现象十分相似。
它的谐振频率与晶片的切割方式、几何形状、尺寸等有关。
(3)符号和等效电路石英晶体谐振器的符号和等效电路如图所示。
当晶体不振动时,可把它看成一个平板电容器称为静电电容C,它的大小与晶片的几何尺寸、电极面积有关,一般约几个pF到几十pF。
当晶体振荡时,机械振动的惯性可用电感L來等效。
一般L的值为几十mH到几百mH。
晶片的弹性可用电容C來等效,C的值很小,一般只有0.0002~0.1pF。
晶片振动时因摩擦而造成的损耗用R來等效,它的數值约为100Ω。
由于晶片的等效电感很大,而C很小,R也小,因此回路的品质因數Q很大,可达1000~10000。
加上晶片本身的谐振频率基本上只与晶片的切割方式、几何形状、尺寸有关,而且可以做得精确,因此利用石英谐振器组成的振荡电路可获得很高的频率稳定性。
晶体符号等效电路频率特性曲线图石英晶体振荡器外形图片(4)谐振频率从石英晶体谐振器的等效电路可知,它有两个谐振频率,即a、当L、C、R支路发生串联谐振时,它的等效阻抗最小(等于R)。
. Word 资料 现代连铸技术讨论课
结晶器正弦振动装置的形式及其特点
班 级: 姓 名: 课程名称:现代连铸技术 指导教师:
2013年11月7日 .
Word 资料 目录
1、结晶器振动技术的发展历史 .................................................................................. 1 2、结晶器的正弦振动 ................................................................................................. 1 2.1正弦振动的定义 ............................................................................................. 1 2.2正弦振动的特点 ............................................................................................. 1 2.3正弦振动机构满足的条件............................................................................... 1 2.4结晶器实现弧形的轨迹方式 ........................................................................... 2 3、结晶器导向机构 ..................................................................................................... 2 3.1 长臂振动机构 ................................................................................................ 2 3.2 导轨式振动机构 ............................................................................................ 3 3.3 差动齿轮振动机构 ......................................................................................... 4 3.4 四连杆振动机构 ............................................................................................ 5 3.5 四偏心振动机构 ............................................................................................ 7 4、机械驱动结晶器正弦振动振幅调整........................................................................ 8 5、同步控制模型 ...................................................................................................... 10 5.1 f=av模型 .................................................................................................. 10 5.2 f=av+b模型控制 ...................................................................................... 10 5.3 f=b模型 .................................................................................................... 10 5.4 f=-av+b .................................................................................................... 10 .
Word 资料 现代连铸技术讨论课
1、结晶器振动技术的发展历史 结晶器振动是连铸技术的一个基本特征。连铸过程中,结晶器和坯壳间的相互作用影响着坯壳的生长和脱膜,其控制因素是结晶器的振动和润滑。连铸在采用固定结晶器浇注时,铸坯直接从结晶器向下拉出,由于缺乏润滑,易与结晶器发生粘结,从而导致出现拉不动或者拉漏事故,很难进行浇注。结晶器振动对于改善铸坯和结晶器界面间的润滑是非常有效的,振动结晶器的发明引进,工业上大规模应用连铸技术才得以实现。可以说,结晶器振动是浇注成功的先决条件,是连铸发展的一个重要里程碑。近年来,冶金工业的迅速发展,要求连铸提高拉速和增加连铸机的生产能力,人们对结晶器振动的认识也在不断深入和发展。结晶器振动经历了早期的非正弦振动方式到正弦振动方式,目前又发展到非正弦振动方式的过程。当然,现在所采用的非正弦振动与早期的非正弦振动虽然振动波形同为非正弦,但其目的和实现方式上二者有本质的区别。
2、结晶器的正弦振动 2.1正弦振动的定义 当结晶器的运动速度与时间的关系为一条正弦曲线时称这种振动为正弦振动。 2.2正弦振动的特点 正弦振动的主要特点是:结晶器在整个振动过程中速度一直是变化的,即铸坯与结晶器间时刻都在相对运动。在结晶器下降时还有一小段负滑动,因此能消除和防止粘结。另外,由于结晶器的运动速度是按正弦规律变化的,加速度则必然按余弦规律变化,所以,过度比较平稳,冲击比较小。它与梯速振动相比,坯壳处于负滑动状态的时间较短,且结晶器上升时间占振动周期的一半,故增加了坯壳断裂的可能性。为了弥补这一弱点应充分发挥加速度较小的长处,亦可采用高频率振动以提高脱模的
效果。
2.3正弦振动机构满足的条件 正弦振动机构满足的两个条件: . Word 资料 ①使结晶器准确地沿一定的轨迹振动; ②使结晶器按一定规律振动。
2.4结晶器实现弧形的轨迹方式 结晶器实现弧形的轨迹方式有:导轨式、长臂式、差动式、双摇杆式以及四偏心式等等。 振动规律的方式:偏心轮式、凸轮式、液压缸式等。 正弦振动规律最突出的优越性是:它只要用一简单的偏心机构(偏心轮或偏心轴套组合)就能实现,无论从设计上还是制造上就能实现。
3、结晶器导向机构 铸坯表面的质量主要取决于结晶器内坯壳形成时的条件,其中一个重要因素就是结晶器壁与坯壳之间的摩擦力所产生的应力。 根据不同的钢种,通过优化振动模式和铸造参数,来减小摩擦力,进而减小坯壳应力是完全可能的。 结晶器振动应尽可能接近所设定的轨迹。这一点在板坯连铸中尤其重要,这里任何横向摇摆、角部的不规则运动都应避免。 一般认为传统的四偏心型和短臂振动机构都有导向方面的设计缺陷,即由于磨损而产生不可控制的运动偏差。这种认识促进了柔性体结晶器振动导向机构的开发。
3.1 长臂振动机构 在弧形连铸机中,它是把结晶器安装在一个与铸机圆弧半径相同的振动臂上,如图3-1所示。 这种振动机构的振动轨迹在理论上是准确的。但如果振动臂较长,则因加工制造误差、受热膨胀、受力变形而使结晶器产生较大的振动轨迹误差。所以它只适用于圆弧半径较小的连铸机上。 .
Word 资料 在连铸发展的初期这种机构被用于生产,但随着连铸机圆弧半径增大而被其他振动机构所代替。不过,由于连铸技术的发展,近年来出现了所谓“超低矮型”连铸机,该机型的基本圆弧半径较小,如R=3m,采用多点矫直,如矫直点数为7-19。由于基本圆弧半径较小而使长臂振动机构又重新获得应用。结晶器沿着精确的轨迹振动对于铸坯的润滑、传热及坯壳的生长、脱模都十分有利。
3.2 导轨式振动机构
图3-3弧线导轨式振动机构
图3-1长臂振动机构 图3-2 低矮型长臂振动机构 .
Word 资料 这种振动机构可以实现弧线运动,也可以实现直线运动.如图3-3、图3-4所示。由于导轨式振动机构避免了长振动臂,结构也比较简单,因此早期应用较多。但是由于导轨不易获得充分润滑,又不易保持清沽,所以磨损较严重,影响运动轨迹精度,因而逐渐被其他振动机构所代替。
图3-4 直线导轨振动机构 虽然近年来导轨式振动机构又在罗可普连铸机上得到了应用。但是导航式振动机构所固有的缺点在生产中依旧暴露无遗,使一些生产厂家不得不对其进行改造。
3.3 差动齿轮振动机构 差动齿轮振动机构是我国60年代中期开发并应用于生产的弧线轨迹振动机构,如图3-5所示。结晶器固定在由弹簧7支撑的振动框架1上,用凸轮或偏心轮8强迫框架下降,利用弹簧的反力使其上升。振动框架的内、外弧侧面,装有齿条6,分别与节圆半径相等的小齿轮2、4相啮合。装在小齿轮轴上的扇形应轮3及5有不同的节圆半径,内弧侧的节圆半径较大,相互啮合的扇形齿轮3及5摆动时、就使与其相连的两个小齿轮2及4产生个同的线速度。反应在振动框架两侧的齿条上,其上下运动的线速度也不一样,因而可使结晶器产生弧线运动,由于它结构复杂,齿轮与导向件磨损较严重等原因而未能得到推广。但劳动原理却在后来的四偏心机构上得到了应用。