仿生扑翼飞行器原理
- 格式:docx
- 大小:450.18 KB
- 文档页数:5
《可折叠仿生扑翼飞行器的设计》一、引言随着科技的飞速发展,飞行器技术也在不断突破。
其中,仿生扑翼飞行器因其独特的设计和高效的工作原理,逐渐成为飞行器领域的研究热点。
本文将介绍一种可折叠仿生扑翼飞行器的设计思路,通过详尽的分析与描述,期望能为未来该领域的研究与发展提供有价值的参考。
二、设计背景与目标可折叠仿生扑翼飞行器设计的主要背景是满足现代航空科技对高效、便携、环保的飞行器需求。
其设计目标包括:实现飞行器的轻量化、可折叠性、仿生扑翼运动以及良好的飞行性能。
同时,为满足实际应用场景的需求,如空中拍摄、地形勘察等,该设计应具备高机动性、低噪音和环保等特点。
三、总体设计1. 结构组成可折叠仿生扑翼飞行器主要由机翼、机身、尾翼、起落架等部分组成。
其中,机翼采用仿生扑翼设计,以实现高效的飞行性能。
机身采用轻质材料制成,以降低整体重量。
尾翼和起落架的设计则保证了飞行器的稳定性和安全性。
2. 折叠设计为实现可折叠性,机翼、尾翼等部分采用折叠式结构设计。
在运输和储存过程中,各部分可折叠收起,减小整体体积,方便携带和运输。
四、仿生扑翼运动设计仿生扑翼运动是该设计的重要部分,通过模仿鸟类或昆虫的飞行方式,实现高效飞行。
设计中采用了多轴驱动的仿生扑翼机构,通过电机驱动,实现机翼的上下扑动。
同时,通过调整扑翼的频率和幅度,以适应不同的飞行需求。
五、动力系统设计动力系统采用高效电动驱动方式,包括电池、电机、电调等部分。
电池选用轻量、高能量的锂离子电池,以保证长时间的飞行。
电机和电调则负责驱动仿生扑翼机构,实现高效的飞行性能。
六、控制系统设计控制系统是该设计的核心部分,采用先进的飞行控制算法和传感器技术,实现对飞行器的精确控制。
包括GPS定位、惯性测量单元(IMU)、自动稳定系统等部分,以保证飞行器的稳定性和安全性。
七、总结与展望本文介绍了一种可折叠仿生扑翼飞行器的设计思路,包括结构组成、折叠设计、仿生扑翼运动设计、动力系统和控制系统等方面。
蝴蝶仿生飞行器原理
蝴蝶仿生飞行器是一种仿生机器人,其原理是通过模仿蝴蝶的翅膀结构和飞行方式来实现飞行。
具体来说,蝴蝶仿生飞行器的原理包括以下几个方面:
1. 翅膀结构
蝴蝶的翅膀结构非常复杂,由许多细小的鳞片、毛发和膜组成。
这些结构可以使得蝴蝶的翅膀具有轻盈、柔软、强韧和高效的特性。
蝴蝶仿生飞行器的翅膀也采用了类似的结构,通过人工制造出一系列微小的结构单元,如纤维、薄膜和毛发等,来模拟蝴蝶的翅膀结构。
这些结构单元可以使得仿生飞行器的翅膀具有轻盈、柔软、强韧和高效的特性。
2. 翅膀运动
蝴蝶的翅膀运动非常灵活,可以实现多种不同的飞行方式,如滑翔、盘旋、上升和下降等。
蝴蝶仿生飞行器的翅膀也可以通过控制翅膀的运动来实现不同的飞行方式。
具体来说,仿生飞行器的翅膀可以通过电机或者人工控制的方式来实现上下、前后和左右的运动,从而实现不同的飞行方式。
3. 感知和控制
蝴蝶的飞行能力不仅仅取决于翅膀结构和运动方式,还与其感知和控制能力密切相关。
蝴蝶可以通过触角、眼睛和感觉器官等来感知周围环境,从而做出相应的飞行决策。
蝴蝶仿生飞行器也可以通过添加各种传感器和控制器来实现类似的感知和控制能力。
例如,可以添加摄像头、超声波传感器和惯性测量单元等来感知周围环境,从而实现自主飞行和避障等功能。
总之,蝴蝶仿生飞行器的原理是通过模仿蝴蝶的翅膀结构和飞行方式来实现飞行。
其核心技术包括翅膀结构设计、翅膀运动控制和感知控制技术等。
这种仿生机器人具有轻盈、柔软、强韧和高效的特性,可以应用于无人机、机器人和航空器等领域。
1. 引言自古以来,人们就梦想着在天空自由翱翔,对鸟在滑翔状态下的研究使人类乘着飞机上了天。
但在一般情况下,昆虫和鸟类翅膀具有很大的机动灵活性,生物超强的飞行能力也引起了人们的极大兴趣,如昆虫利用其薄如蝉翼的翅膀高频振动,能够实现前飞、倒飞、侧飞及倒着降落等特技飞行。
对生物生理结构和飞行机理的研究为仿制出具有更大飞行灵活性的新型扑翼飞行器打下坚实基础。
随着对生物飞行机理的认识和微电子机械技术(MEMS)、空气动力学和新型材料等的快速发展,仿生扑翼飞行器在目前已成为一个新的研究热点。
由于其在军事和民用上均具有广泛的应用前景,许多国家都已在这方面进行了研究,如美国加州大学伯克利分校、日本东京大学等都已经在这个领域进行了深入的研究探索工作,国内的科学家们也开始了这方面的基础和应用研究工作。
本文主要介绍了仿生扑翼飞行器的特点和关键技术,以及其在国内外的研究现状,并进行了对比分析思考,提出了相应的见解。
1. 仿生扑翼飞行器的特点仿生扑翼飞行器是一种模仿鸟类和昆虫飞行,基于仿生学原理设计制造的新型飞行机器。
该类飞行器若研制成功,那么与固定翼和旋翼飞行相比,它便具有独特的优点:如原地或小场地起飞,极好的飞行机动性和空中悬停性能以及飞行费用低廉,仿生扑翼飞行器的研究现状及关键技术o 周骥平 武立新 朱兴龙扬州大学机械工程学院[摘 要] 本文简要介绍了仿生扑翼飞行器的概念、特点及其应用,概述了仿生扑翼飞行器在国内外早期和当前的研究现状及未来的发展趋势。
在此基础上,就目前研究中迫切需要解决的一些关键技术进行了讨论,并结合目前研究情况,对我国仿生扑翼飞行器的未来发展前景进行了展望。
[关键词] 仿生;扑翼飞行器;微型飞行器;关键技术[Abstract] The concept, characteristics and usage of flapping-wing air vehicle (FAV) are brieflyintroduced. The present research situation and future development trend of FAV are summarized.According to these, several key technologies of FAV are discussed. Taking into account the presentsituation , the future on the research of FAV in China is outlined.[Keywords] Bionics; Flapping-wing air vehicle; Micro air vehicle; Key technology[作者简介]周骥平(1960-),男,扬州大学机械工程学院院长,博士,教授,研究领域: 机电一体化,机械设计理论与方法等.*基金项目:江苏省高校自然科学基金项目资助(02KJD460010)综述2004.6它将举升、悬停和推进功能集于一扑翼系统,可以用很小的能量进行长距离飞行,因此更适合在长时间无能源补充及远距离条件下执行任务。
蝴蝶仿生飞行器原理引言:蝴蝶作为昆虫界的飞行高手,其独特的飞行方式一直以来都令人着迷。
蝴蝶仿生飞行器就是以蝴蝶的飞行原理为基础,通过模仿蝴蝶的翅膀结构和飞行姿态来实现飞行器的自主飞行。
本文将介绍蝴蝶仿生飞行器的原理以及其在工程领域中的应用。
一、蝴蝶翅膀的结构蝴蝶的翅膀由脉络和膜翅组成。
脉络是一系列分支的管状结构,支撑着膜翅的形状并使其保持稳定。
膜翅是由薄膜组成的,可以根据蝴蝶的需要进行伸展和收缩。
这种翅膀结构使得蝴蝶可以在空气中灵活地飞行。
二、蝴蝶的飞行姿态蝴蝶的飞行姿态主要包括上升、下降、前进、转弯等动作。
蝴蝶在飞行时利用翅膀的变形和振动来产生升力和推进力。
当蝴蝶的翅膀向下振动时,空气会对翅膀产生阻力,使蝴蝶向上升起。
而当蝴蝶的翅膀向上振动时,空气会对翅膀产生向下的推力,使蝴蝶向前推进。
三、蝴蝶仿生飞行器的原理蝴蝶仿生飞行器通过模仿蝴蝶的翅膀结构和飞行姿态来实现飞行。
首先,蝴蝶仿生飞行器采用了与蝴蝶翅膀相似的膜翅结构,使得飞行器在飞行中可以根据需要伸展和收缩翅膀,从而调节飞行器的升力和推进力。
其次,蝴蝶仿生飞行器通过控制翅膀的振动来产生升力和推进力,使得飞行器能够实现上升、下降、前进和转弯等动作。
四、蝴蝶仿生飞行器的应用蝴蝶仿生飞行器的原理在工程领域中有着广泛的应用。
首先,在飞行器设计中,蝴蝶仿生飞行器的原理可以用于改进飞行器的操控性能和飞行稳定性。
通过模仿蝴蝶的翅膀结构和飞行姿态,可以设计出更加灵活、稳定的飞行器,提高飞行器的操控能力。
其次,在无人机领域,蝴蝶仿生飞行器的原理可以用于提高无人机的飞行效率和能耗。
通过模仿蝴蝶的飞行方式,可以设计出更加节能、高效的无人机,延长其续航时间。
此外,蝴蝶仿生飞行器的原理还可以应用于风力发电机的设计中,通过模仿蝴蝶的翅膀结构和飞行姿态,可以提高风力发电机的转化效率,实现更加稳定和高效的发电。
结论:蝴蝶仿生飞行器通过模仿蝴蝶的翅膀结构和飞行姿态,实现了飞行器的自主飞行。
一种仿生蝴蝶扑翼飞行器及其拉线式转向机构的制作方法仿生蝴蝶扑翼飞行器是一种通过模仿蝴蝶独特的飞行方式而设计的飞行器。
它能够在空中灵活操控,具有较好的机动性能和稳定性。
在本文中,将介绍一种制作仿生蝴蝶扑翼飞行器及其拉线式转向机构的方法。
首先,我们需要准备一些材料和工具。
材料包括轻质的材料如薄金属片或塑料片,弹性线或者细线,小型电机,螺旋桨等。
工具则包括剪刀,胶水,钳子,锉子等。
1. 制作翅膀:使用剪刀将薄金属片或塑料片剪成蝴蝶翅膀的形状,大小可自行决定。
确保两个翅膀相对称,并且具有足够的扑翼空间。
然后使用锉子修整翅膀的边缘,使其光滑,减少空气阻力。
最后使用胶水将两个翅膀连接在一起,并且确保翅膀能够自由地扑动。
2. 安装电机和螺旋桨:选择一个小型电机并安装在飞行器的中心位置上。
将螺旋桨固定在电机轴上,确保可以有效地产生推力。
3. 制作拉线式转向机构:在飞行器的尾部或机身两侧的翅膀上,通过胶水或螺丝固定一个小轴。
使用弹性线或者细线将此小轴连接到电机上。
当电机旋转时,它将通过拉线转动翅膀,实现方向的改变。
完成以上步骤后,我们就成功地制作了仿生蝴蝶扑翼飞行器及其拉线式转向机构。
在使用时,只需将电机连接到能源供应,并确保翅膀可以自由地扑动。
通过控制电机的转动速度和方向,我们可以实现飞行器的正常飞行以及转向。
总结:仿生蝴蝶扑翼飞行器及其拉线式转向机构的制作方法相对简单,只需准备适当的材料和工具,并按照上述步骤进行操作即可。
这种飞行器的设计灵感来自于蝴蝶的飞行方式,具有较好的机动性能和稳定性。
通过不断改进和调整,希望能够进一步完善这种仿生飞行器,并应用到更多实际应用场景中。
蝴蝶仿生飞行器原理蝴蝶,作为一种翅膀轻盈的昆虫,其独特的飞行方式一直以来都引起了人们的好奇和探究。
蝴蝶仿生飞行器正是受到了蝴蝶的飞行原理的启发而设计的一种飞行器。
本文将介绍蝴蝶仿生飞行器的原理及其应用。
蝴蝶的翅膀是其飞行的关键,它们的翅膀由许多小而薄的鳞片组成,这些鳞片可以灵活地移动和改变角度。
当蝴蝶飞行时,它们通过调整翅膀的角度和振动频率来产生升力和推力,从而实现飞行的目的。
蝴蝶仿生飞行器利用了蝴蝶的飞行原理,通过模拟蝴蝶的翅膀结构和运动方式来实现飞行。
首先,仿生飞行器的翅膀采用了类似于蝴蝶翅膀的鳞片结构,这种结构可以使飞行器的重量减轻,并且具有一定的柔韧性。
其次,仿生飞行器的翅膀可以通过机械装置调整角度和振动频率,从而产生升力和推力。
这种设计使得仿生飞行器能够在空中保持平衡并实现稳定的飞行。
蝴蝶仿生飞行器的应用非常广泛。
首先,在军事领域,仿生飞行器可以用于进行侦查和监视任务。
其翅膀的柔韧性和稳定性使得飞行器可以在复杂的环境中自由飞行,并收集情报信息。
其次,在科研领域,仿生飞行器可以用于进行气象观测和环境监测。
它可以携带各种传感器,对大气中的温度、湿度、气压等参数进行实时监测,从而为气象预测和环境保护提供数据支持。
此外,在救援行动中,仿生飞行器也可以发挥重要作用。
它可以飞入灾区进行搜救和救援,为受灾群众提供帮助。
蝴蝶仿生飞行器的原理虽然简单,但是其应用却十分广泛。
它不仅可以模拟蝴蝶的飞行方式,还可以结合现代科技,实现更多的功能。
随着科技的不断发展,相信蝴蝶仿生飞行器会在更多领域展现出其独特的价值和优势。
总结起来,蝴蝶仿生飞行器利用了蝴蝶的翅膀结构和运动方式来实现飞行,其翅膀的鳞片结构和机械装置使得飞行器可以产生升力和推力,并保持平衡和稳定。
蝴蝶仿生飞行器的应用广泛,包括军事侦查、科学研究和救援行动等领域。
相信随着科技的发展,蝴蝶仿生飞行器将会展现出更多的潜力和价值。
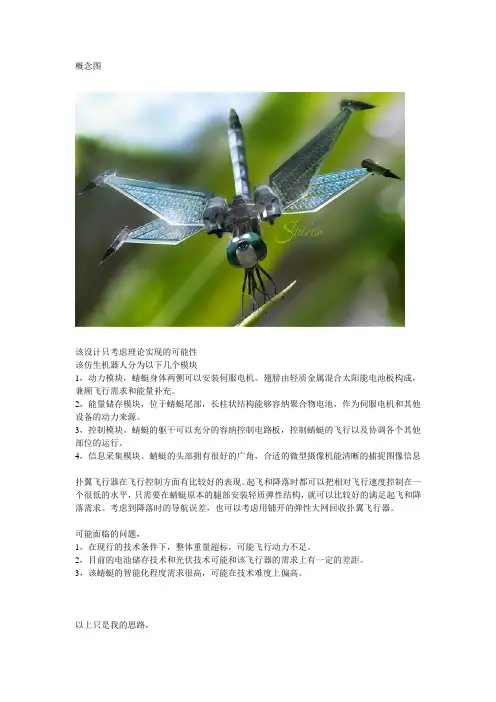
概念图
该设计只考虑理论实现的可能性
该仿生机器人分为以下几个模块
1,动力模块,蜻蜓身体两侧可以安装伺服电机。
翅膀由轻质金属混合太阳能电池板构成,兼顾飞行需求和能量补充。
2,能量储存模块,位于蜻蜓尾部,长柱状结构能够容纳聚合物电池,作为伺服电机和其他设备的动力来源。
3,控制模块。
蜻蜓的躯干可以充分的容纳控制电路板,控制蜻蜓的飞行以及协调各个其他部位的运行。
4,信息采集模块。
蜻蜓的头部拥有很好的广角,合适的微型摄像机能清晰的捕捉图像信息
扑翼飞行器在飞行控制方面有比较好的表现。
起飞和降落时都可以把相对飞行速度控制在一个很低的水平,只需要在蜻蜓原本的腿部安装轻质弹性结构,就可以比较好的满足起飞和降落需求。
考虑到降落时的导航误差,也可以考虑用铺开的弹性大网回收扑翼飞行器。
可能面临的问题,
1,在现行的技术条件下,整体重量超标,可能飞行动力不足。
2,目前的电池储存技术和光伏技术可能和该飞行器的需求上有一定的差距。
3,该蜻蜓的智能化程度需求很高,可能在技术难度上偏高。
以上只是我的思路,。
仿鸟扑翼飞行器结构设计与气动性能研究摘要随着科学技术的发展和对知识的进一步探索,人们在仿生学领域和低雷诺数空气动力学方向上的理论研究逐渐成熟,同时也优化了扑翼飞行器的设计与制造。
为了提高扑翼飞行器的气动性能,本文从驱动结构和机翼的气动性能两方面进行研究,将几种扑动机构进行了对比,选择单曲柄双摇杆机构作为研究对象,进行了机械建模和运动仿真。
针对优化前后两组不同的数据进行运动仿真;同时,以翅翼作为研究对象进行仿真计算,通过压力云图、速度云图和升阻力系数等数据分析,研究了扑翼飞行器机翼的气动性能。
研究表明,当振幅为45°时,翅翼表面的升阻比为整组数据的最大值,并且在这种运动状态下,翅翼表面的相对压力较小,翅翼上下表面的压力负担较小,且具备良好的速度特性,翅翼的气动性能最佳。
关键词:扑翼飞行器;气动性能;结构设计1.引言随着科技的发展,对空气动力学的研究逐步完善,但我们不可否认的是,虽然扑翼飞行已经被鸟类或昆虫类熟练的运用到各个方面,但人们还没有将扑翼飞行成熟的体现在某一产品当中。
扑翼飞行器相比于固定翼与旋翼飞行器,能够快速起飞,加速,悬停,具有极高的机动性与灵活性;可以应用在国防领域和民用领域,完成许多其他飞行器和人类无法完成的任务。
与此同时,仿鸟扑翼飞行器需要足够的动力系统,以及轻巧但具备一定强度的结构骨架。
因此,研究仿鸟扑翼飞行器结构设计与气动性能有着重要意义。
我国对于扑翼飞行器的研究起步于上世纪90年代。
张志涛等、曹雅忠等、程登发等、吴孔明和郭予元、彩万志等分别开展了生物飞行动力学、生理学、功能形态学等方面的研究[[1]]。
南京航空航天大学曾锐,昂海松等对鸟类扑翼飞行机理进行了深入研究,提出一种新的变速、折叠模型,并通过数值计算,认为采用这种模型,升力系数明显增加[[2]]。
北京航空航天大学的孙茂等人用Navier-Stokes方程数值解和涡动力学理论研究了模型昆虫翼作非定常运动时的气动力特性,解释了昆虫产生高升力的机理,在此基础上探索了微型飞行器的飞行原理,包括气动布局新概念、新控制方式、最大速度、允许重量以及需要功率等问题[[3]][[4][[5]][[6]]。
《两段式仿生扑翼飞行器的结构设计及气动特性仿真》一、引言随着科技的不断进步,仿生学在航空领域的应用日益广泛。
其中,仿生扑翼飞行器因其高机动性、高仿生性及良好的环境适应性,成为了当前研究的热点。
本文将重点探讨两段式仿生扑翼飞行器的结构设计及气动特性仿真。
二、两段式仿生扑翼飞行器的结构设计1. 整体结构两段式仿生扑翼飞行器主要包含动力系统、控制系统和扑翼系统三个部分。
其中,扑翼系统采用两段式设计,分为上、下两个部分。
整体结构仿照鸟类飞行时的翅膀运动,具有较高的灵活性和适应性。
2. 扑翼系统设计扑翼系统是仿生扑翼飞行器的核心部分,其设计直接影响到飞行器的性能。
两段式扑翼系统由上翼段和下翼段组成,通过驱动机构实现上下扑动。
上翼段主要负责产生升力,下翼段则起到调节气流、增强飞行稳定性的作用。
3. 动力系统设计动力系统为仿生扑翼飞行器提供动力,主要包括电机、电池和传动机构等部分。
为了保证飞行器的轻量化和高效性,我们选用高性能的电机和电池,通过传动机构将动力传递到扑翼系统,实现飞行器的飞行。
4. 控制系统设计控制系统是仿生扑翼飞行器的大脑,负责飞行器的导航、控制和姿态调整。
我们采用先进的飞行控制算法和传感器技术,实现对飞行器的精确控制,使其能够按照预设的轨迹进行飞行。
三、气动特性仿真为了更好地了解两段式仿生扑翼飞行器的气动特性,我们采用计算流体动力学(CFD)技术进行仿真分析。
通过建立三维模型,模拟飞行器在不同速度、不同攻角下的气流分布和压力分布,从而得到飞行器的气动性能参数。
仿真结果表明,两段式仿生扑翼飞行器在扑动过程中,上下翼段的协同作用能够产生较大的升力,同时减小阻力。
此外,通过调整扑动频率和幅度,可以实现对升力和阻力的有效控制,从而提高飞行器的飞行性能。
四、结论本文对两段式仿生扑翼飞行器的结构设计及气动特性仿真进行了探讨。
通过采用两段式扑翼系统、高性能的动力系统和先进的控制系统设计,实现了仿生扑翼飞行器的轻量化、高效化和智能化。
摘要超小型仿生扑翼飞行器(FMAV)是一种模仿鸟类或昆虫飞行的新概念飞行器。
仿生学和空气动力学研究均表明,对于特征尺寸相当于鸟或者昆虫的微型飞行器来说,扑翼飞行要优于固定翼和旋翼飞行器。
本文以采用单曲柄双摇杆驱动机构的超小型仿生扑翼飞行器为研究对象,以提高其运动对称性为目的进行优化设计,为解决该类飞行器在飞行过程中发生向左或者向右倾斜、栽落的问题提出一种新的解决方案。
在对鸟类扑翼飞行生物学原理研究的基础上,从合力作用与分解的角度提出了一种气动力对超小型仿生扑翼飞行器作用的机理,解释了超小型仿生扑翼飞行器在试飞过程中倾斜栽落的力学原因。
同时根据该机理和条带理论计算了超小型仿生扑翼飞行器作一维拍动时上下方向受到的气动力,最后将计算结果与风洞实验所得到的升力曲线进行了比较,二者的结果比较接近。
用ADAMS建立超小型仿生扑翼飞行器虚拟样机,将气动力计算结果加载到虚拟样机上,仿真得到动力学状态下两翼扑动角速度曲线图;位置控制系统应用PID控制技术,借助MATLAB和ADAMS进行联合仿真,结果显示该控制系统设计合理,为超小型仿生扑翼飞行器的研制奠定了基础。
关键词:扑翼飞行器,仿生,PID控制,仿真The Design of Control System for Bionic Flapping-wingMicrominiature Air VehicleABSTRACTBionic Flapping-wing Microminiature Air Vehicle (FMAV) are new conceptual air vehicles that mimic the flying modes of birds and insects. The study of bionics and aerodynamics indicates that the MAV which the characteristic dimension almost equate to bird or insect, the flapping flight is precede to fixed and rotatory MAV.The object of study in the paper is FMAV that have driving mechanisms of single-crank and double-rocker, and launched the work surrounding the goal of enhancing the symmetry of the wings’ movement. a new solution of FMAV with driving mechanisms of single-crank and double-rocker often tilt toward the left or the right and fall in the course of flight was proposed in the paper. Based on the biological flight mechanism of birds, a new mechanism of FMAV affected by forces was proposed in view of composition of forces, and the reason of the phenomena in force was explained under the using the new mechanism. The force on wings in a full cycle was computed new mechanism when there was only flapping, and its curve is similar to the curve tunnel test.The whole simulation model of FMAV was established in ADAMS, then the precomputed force was load to the model, and the angular velocity of both wings in aerodynamic situation was gained, which paved the way to the dynamics optimization of the driving mechanisms. The position control system was designed by PID in the paper. The position control mode is research deeply by MATLAB and ADAMS. Results indicate that this positioncontrol system is efficient.Key words:FMAV,bionic,PID,simulation超小型仿生扑翼飞行器扑动控制设计厉敏0811051750 引言自古以来,人们就梦想着在天空自由翱翔。
自制扑翼机的原理
自制扑翼机的原理可以分为几个主要部分:翅膀结构、动力系统和控制系统。
1. 翅膀结构:扑翼机的翅膀一般采用类似于鸟类翅膀的结构,可以通过拍动实现推进和升力。
翅膀一般由轻质材料制成,如碳纤维和玻璃纤维等,以减少重量。
翅膀的形态设计要考虑到空气动力学的原理,以最大限度地提供升力和减少阻力。
2. 动力系统:扑翼机的动力系统可以分为两种类型:人力驱动和机械驱动。
人力驱动的扑翼机通常通过鸟类类似的拍翅动作来提供动力,需要人员持续施加力量来推动翅膀。
机械驱动的扑翼机则采用发动机、电动机或压缩空气等能源来提供动力,通过机械结构将动力转化为翅膀的拍动。
3. 控制系统:扑翼机的控制系统用于调节翅膀的拍动频率、角度和幅度等参数,以实现飞行姿态的调整。
控制系统可以采用传统的机械控制方式,如杆杆连接或绳索连接,也可以采用电子控制系统,通过电动机或舵机控制翅膀的运动。
控制系统一般由飞行员或自动控制系统操控。
总体来说,扑翼机通过模拟鸟类的翅膀拍动运动和施加相应的动力来产生升力,从而实现飞行。
不同的自制扑翼机可能采用不同的设计和材料,但原理基本相似。
仿生扑翼式飞行器2013年9月7日摘要随着航空技术的发展,微型与小型飞行器以其灵活轻便、成本低廉等优点受到研发者的青睐。
相对于大型固定翼、旋翼飞行器,微、小型扑翼机在低空探测、突然袭击、认知搜救、城市作战等方面有着无法比拟的优势。
微、小型扑翼飞行器尚处于初期研发阶段,目前均以仿生学为基础,多数模仿蜻蜓、蜜蜂等昆虫的扑翼原理,而对仿鸟类扑翼飞行器的研究涉及甚少。
鸟类较昆虫有更强的环境适应能力,尤其是恶劣气候环境,且鸟类具有一定量的载重能力,方向调节性能更佳。
该项技术并没有进入实用化阶段,我们有幸成为探索者之一。
在这个项目中我们不一定能做出一架高性能的扑翼机来,但我相信这一定是一个很有启发意义的探索。
关键词:仿生,仿鸟,扑翼机,小型飞行器AbstractWith the development of aviation technology, the micro and small vehicle with the advantages of flexibility, portability and low costhasgained R &D’s pare to the large fixed wing aircraft androtorcraft, microandsmall ornithopter has incomparable advantages in terms of low altitude detection, surprise attack, cognitive search and rescue, andcity operation. Micro, small ornithopter is still in the initial stage of development, currently basesonbionics flapping theory. Most ornithopters imitate dragonfly, bees and other insects, with study of ornithoptersimitatingbirdslittle involved. Birds have a stronger ability to adapt to the environment, especially the harsh climate, andtheircontrol performance is betterthan insects. Moreover, the birds have a certain amount of load capacity.As the technology has not entered the practical stage, we are honored tobecome one of the explorers. In this project, we may beunable to make a high performance aircraft, but I believe that it must be a very instructive exploration.Key words:Bionics, Bird-imitation, Ornithopter, Small aircraft目录目录 (iii)第一章绪论 (1)1.1选题背景 (1)1.2研制重点难点 (2)第二章国内外研发状况 (6)2.1国外研发状况 (6)2.2国内研究情况 (12)第三章作品设计论述 (15)3.1创意构想及三维模型制作 (15)3.1.1概述 (15)3.1.2翅膀扑打运动的实现机构 (15)3.1.3二级齿轮减速器 (17)3.1.4翼型 (19)3.1.5翅膀的扭转 (20)3.1.6尾翼 (20)3.2内部电路 (21)3.2.1电源部分 (21)3.2.2直流电机 (21)3.2.3舵机 (22)3.2.4控制板 (22)第四章应用前景 (24)4.1特点 (24)4.2应用前景 (24)结论 (26)参考文献 (27)致谢词 (28)附录 (29)图1亚氏悬挂式滑翔机外观图 (6)图2亚氏悬挂式滑翔机人类进行飞行示意图 (7)图3亚氏悬挂式滑翔机机构简图 (7)图4史氏玩具飞机扑翼结构 (8)图5史氏玩具飞机机构简图 (8)图6D ELAURIER拍扑机 (9)图7昆虫胸腔剖面示意图 (9)图8麦氏扑翼机扑翼机构 (10)图9麦氏扑翼机机构简图 (10)图10肯式扑翼机扑翼机构 (11)图11肯式扑翼机机构简图 (11)图12M ADANGOPAL微扑翼机构 (12)图13詹秀玲飞鸟玩具整体构造图 (13)图14詹秀玲飞鸟玩具扑翼机构 (13)图15詹秀玲飞鸟玩具机构简图 (13)图16两自由度胸腔式扑翼驱动机构简图 (14)图17压电驱动的仿生微扑翼机构 (14)图18创意整体三维概念模型 (15)图19翅膀扑打运动的实现机构 (17)图20二级齿轮减速器 (18)图21齿轮减速局部视图 (19)图22翼型 (20)图23尾翼 (21)图24舵机控制板外形 (22)图25控制软件 (23)第一章绪论1.1 选题背景我们处在高科技时代,科技文明迅速发展,市面上诸多商品都朝轻、薄、短、小的目标迈进,如手机、随身听、电脑等等,当然应用于军事上的微型飞行器亦是如此。
鸟类仿生学的研究报告XXXXX学院 XXXXXXXXXXXXXXXXX XXXXXXX号 Tel:XXXXXXXXX,******************摘要:自然界昆虫和小鸟翅膀柔性在提高气动效率和飞行稳定性方面具有很大优势,因而翅的柔性仿生研究将成为目前微小型仿生飞行机器人的重要方向。
以昆虫翅膀为基础,进行了柔性翅的仿生机械设计,并重点对其柔性进行了分析积实验研究。
实验结果表明,柔性翅的展弦比和前缘梁刚度对升力有较大的影响,其中变刚度前缘粱和大展弦比有益于升力的产生。
[1]关键词:仿生;机械;建议引言:从始祖鸟的出现到现在,在这亿万年的漫长进化过程中,鸟类形成了许多卓有成效的导航、识别、计算、能量转换等系统,其灵敏性、高效性、准确性、抗干旱性都另人惊叹不已。
人们研究这些结构和功能原理并加以模拟,用来改善现有的或创造新的机械、仪器、工艺,这就是仿生学研究的一项重要内容。
鸟类有高超的飞行本领,当然现代的飞机在很多性能上都远远超过鸟类,可是在节约能源上,在灵巧性上就相形见绌了。
如一只鸟连续在海洋上空飞行4000多公里,体重减轻0.06公斤;小巧的蜂鸟不仅能垂直起落,而且在吮吸花蜜时能取直立姿势,悬在空中进退自如,灵活异常。
对这些特殊功能的研究利用,将会使飞机的性能进一步得到改进。
如野鸭能悠然自得地飞行在9500米的半高空,而人在登上4500米时呼吸已经感到很困难了。
研究鸟为什么会在空气稀薄的条件下脑血管依然畅通,可对人类在供氧不足的环境中正常生活和延长生命有重要意义。
鸽子在仿生学方面有很大的贡献。
它的腿上有一个小巧而灵敏的感受地震的特殊结构,人们根据它的原理仿制出一种新的地震仪,使地震预报更加准确。
它的眼睛有着特殊的识别本领,这是由于它的视网膜上有6种功能专一的神经节细胞:叶亮度检测器、普通边检测器、凸边检测器、方向检测器、垂直边检测器、水平检测器,人们模仿它视网膜上的细胞结构制成的鸽眼电子模型,虽结构还不及它的复杂和完善,但安装在警戒雷达上、应用于电子计算机处理有关数据方面已有广阔的前景。
仿生扑翼飞行器原理
标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
仿生扑翼飞行器原理
一.扑翼飞行器简介
扑翼飞行器是区别于固定翼飞行器、旋转翼飞行器的另一类飞行器,其飞行原理直
接来自自然界的鸟类和昆虫的飞行方式。与固定翼和旋转翼相比有明显的优势。与固定翼
飞行器相比,它可同时将举升、悬停、推进等功能集中在一个扑翼系统中;与旋转翼飞行
器相比,它的能量利用率更高,即可推进飞行,也可滑翔飞行,而且更灵活。
二.飞行器的飞行原理
传统飞行器大致可分为三类:一类是根据牛顿第二定律,即作用力与反作用力定
律,获得空气的反作用力进行飞行的,包括各类固定、旋转、扑翼飞行器;第二类是阿基
米德原理,获取空气的浮力进行飞行,如各类飞艇,热气球;第三类是根据动量守恒定理
飞行的,如,火箭,宇宙飞船的飞行等。
由上可知扑翼飞行器的动力来源是空气对飞行器的反作用力。从简单飞艇入手,飞
行器的上升原因是因为空气对其竖直向上的推力大于其自身的重力。要获得前进方向的运
动必须还得有一个水平的推力,这样飞行器才能完成基本的飞行。比如固定翼飞行器,一
般由引擎提供水平的推力,机翼在高速气流的作用下产生升力,再如直升飞机,由引擎提
供升力,螺旋桨与水平面的夹角产生的分力作为推力。
综上所述,扑翼飞行器必须能同时获得空气对其在水平和竖直方向上的足够的反作
用力,即升力和推力,才能完成简单飞行。
三.对鸟类飞行的分析
尽管人类对飞行器的研究有了辉煌
的成就,但是鸟类仍是地球上最棒的
‘飞行器’。这里以鸽子作为研究对
象。鸽子可以在前进方向上以任何角度
飞行,还可以从容的变化飞行姿势,随
时转弯,随意的起飞降落,同时飞行动
作可以清楚的观察。
鸽子的飞行主要归功于它灵活有力
的翅膀和尾翼。下面我们将试着简单的说明一下鸽子的飞行原理。根据前面的飞行原理,
鸽子的翅膀必须能产生竖直向上的升力和水平的推力(这两个力不一定是严格的水平和竖
直)。
1.升力的产生:在这里我们先假设空气是静止的。鸽子的翅膀可以围绕身体作一定
角度的摆动,向下摆动时翅膀展开,向上摆动时翅膀折叠成到V形,而且往返摆动的时间
不相等(这个有待验证)。由于翅膀上下摆动时受力面积不同,从而导致翅膀上下摆动时
的受力大小不同,向下摆动时空气对翅膀的反作用力F1(竖直向上)大于向上摆动时空
气对翅膀的反作用力F2(竖直向下),
当F1>G时,产生向上的升力
连续的飞行动作是一个循环的过程,循环单元就是翅膀做一次上下摆动,向上摆动
记作T1,向下摆动记作T2。
在t1时,产生向上的速度v,在t2时,f2和g会产生向下加速度,使v减小,鸽
子减速上升直到速度为零,再下降,如果在没有降到初始位置前下一个循环开始,那么鸽
子就可以在宏观上产生竖直向上的运动。
2.推力的产生:
水平推力是由气流方向对翅膀反作用力的水平分量提供的。若以向右为飞行前进方
向,则当翅膀下摆时,翅膀截面与水平面呈一个锐角,翅膀上摆时,翅膀截面与水平面呈
一个钝角,两种情况对应的空气反作用力方向相反,但都会产生一个与前进方向相同的推
力,鸽子在水平方向前进。
鸽子的翅膀由骨架、肌肉、皮肤和羽毛组成。骨架较硬,肌肉羽毛相对有弹性。这是
由于肌肉羽毛的弹性,使翅膀在摆动的时候翅膀的后沿一只跟随着前沿运动并一直滞后于
前沿,因此翅膀截面会在翅膀上下摆动时与水平面的夹角产生近似互为余角的变化。
3.转向原理:
鸽子的转向种类很复杂,根据日常生活的观察,有大半径转向、小半径转向、在滑翔
中转向,在飞行中转向。这些转向都依靠翅膀的不对称摆动、尾翼转动和展合以及躯干扭
动的相互配合而实现的,鸽子具体是如何通过控制这些器官来实现转向,这个过程复杂我
们也无法解释,但可以抓住主要因素,从原理上简单的进行分析。
我认为鸽子的转向主要依靠翅膀的不对称摆动实现。按性质可分为动力转向和阻力转
向。
1. 动力转向:翅膀的不对称摆动可以为飞行提供不对称的动力和阻力,假设鸽
子在水平面飞行,空气相对静止,如果两侧翅膀提供的推力不同,就会使两
侧翅膀上产生的速度不同,从原理上说翅膀提供了一个与鸽子前进方向有一
定夹角的力,我们知道如果物体受力的方向与运动的方向不共线,那么该物
体就会作曲线运动,因此鸽子会转向
2. 阻力转向:如果鸽子在滑翔中控制翅膀的形状,使翅膀左右的阻力不相等,
那么就会产生一个和前进方向不共线的阻力,也会使鸽子转向。