仿生扑翼机器人
- 格式:ppt
- 大小:5.05 MB
- 文档页数:27
一、课题背景现在和未来的飞行机器人设计方向是期望机器人是小巧的、手提的、可随身携带的,像昆虫一样超低空飞行,能够灵活地完成侦查和搜索任务。
随着空气动力学和MEMS 制作等技术的发展,飞行器的小型化、微型化的研究越来越引起重视,微型飞行器(MAV)的出现正是这些研究的产物。
MAV一般是指翼展长度在15cm左右,重量在几十克至上百克,有效载荷20g,航速64~80km/h,留空时间20~60min,航程数10km;它应有实时成像、导航及通讯能力,可用手、弹药或飞机部署。
由于微型化的飞行器在众多领域有不可估量的应用潜力,因此世界许多发达国家已经将MAV技术列为研究的重点。
1992年,美国兰德公司(RAND)提交DARPA的一份关于未来军事技术的研究报告首次提出了MAV的概念。
该报告认为,携有微小传感器、尺寸极小的侦察飞行器的设想可以实现的,发展尺度位于昆虫量级的微型飞行系统对美国在未来保持军事领先具有重要意义,MAV将会改变未来的战争模式。
此后,麻省理工学院(MIT)的林肯实验室(Lincoln Laboratory)和美国海军研究实验室(NRL)对MAV技术上的可行性进行了更为深入的评估,得出了与兰德公司一致的结论。
微型飞行器的概念唤起了巨大的研究热情,得到世界上许多国家的广泛关注,如澳大利亚、德国、日本、俄罗斯、印度、以色列等,他们继美国之后纷纷成立专门研究机构、投入研究经费。
二、MAV飞行方式的选择MAV通过机翼与周围空气的相互作用产生克服自身重力的升力,从而实现空中飞行之目的。
目前MAV根据其翼型运动方式的不同可分为3类,分别为固定翼、旋翼和扑翼。
固定翼MAV在空气动力学方面面临着不少技术问题。
由于尺寸限制,固定翼通常采用小展旋比机翼布局,升阻比较小,升力面积也比较小,而且MAV飞行的速度也比较小(人约lOm/s左右),所以很难提供足够的升力。
由于尺寸小和航速低,MAV的流场雷诺数比常规的飞行器小得多,传统的空气动力学理论已经不再适用。
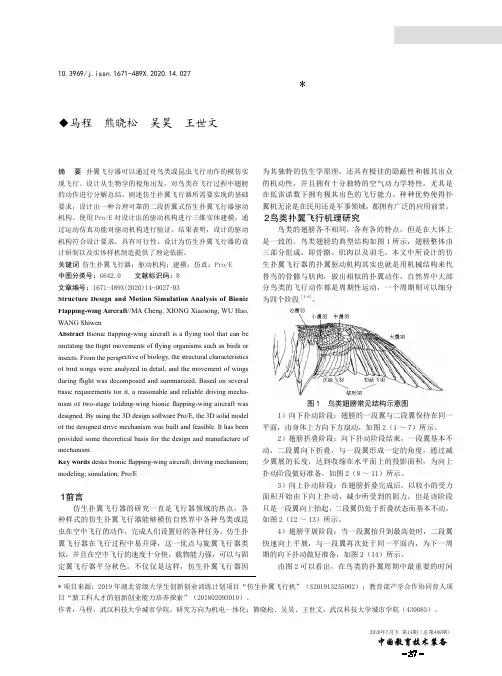
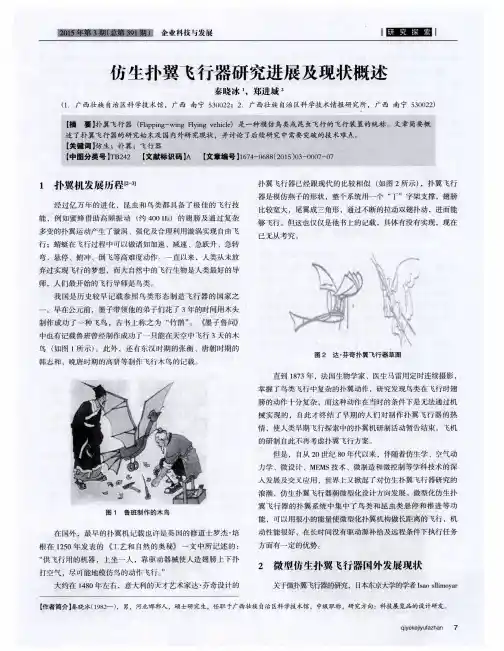
摘 要 扑翼飞行器可以通过对鸟类或昆虫飞行动作的模仿实现飞行。
设计从生物学的视角出发,对鸟类在飞行过程中翅膀的动作进行分解总结。
阐述仿生扑翼飞行器所需要实现的基础要求,设计出一种合理可靠的二段折翼式仿生扑翼飞行器驱动机构。
使用Pro/E 对设计出的驱动机构进行三维实体建模,通过运动仿真功能对驱动机构进行验证。
结果表明,设计的驱动机构符合设计要求,具有可行性。
设计为仿生扑翼飞行器的设计研制以及实体样机制造提供了理论依据。
关键词 仿生扑翼飞行器;驱动机构;建模;仿真;Pro/E 中图分类号:G642.0 文献标识码:B1671-489X(2020)14-0027-03Structure Design and Motion Simulation Analysis of Bionic //MA Cheng, XIONG Xiaosong, WU Hao, apping-wing aircraft is a fl ying tool that can be ight movements of fl ying organisms such as birds or insects. From the perspective of biology, the structural characteristics of bird wings were analyzed in detail, and the movement of wings ight was decomposed and summarized. Based on several basic requirements for it, a reasonable and reliable driving mecha-nism of two-stage folding-wing bionic fl apping-wing aircraft was designed. By using the 3D design software Pro/E, the 3D solid model of the designed drive mechanism was built and feasible. It has been provided some theoretical basis for the design and manufacture of desks bionic fl apping-wing aircraft; driving mechanism; modeling; simulation; Pro/E 1 前言仿生扑翼飞行器的研究一直是飞行器领域的热点,各种样式的仿生扑翼飞行器能够模仿自然界中各种鸟类或昆虫在空中飞行的动作,完成人们设置好的各种任务。
5.1 仿生创新设计原理及分类5.1.1仿生学与仿生机械学概述在长期的进化过程中,受到自然条件的严峻选择,为了生存和发展,自然界形形色色的生物各自练就了一套独特的本领。
例如,有利用天文导航的候鸟,有建筑巧妙的蜂窝,有能探测势源的响尾蛇;海洋中水母能预报风暴;老鼠能事先躲避矿井崩塌或有害气体;蝙蝠能感受到超声波;鹰眼能从三千米高空敏锐地发现地面上运动着的小动物;蛙眼能迅速判断目标的位置、运动方向和速度,并能选择最好的攻击姿势和时间。
人们在技术上遇到的许多问题、许多困难找不到正确解决的方法和途径,生物界早在千百万年前就曾出现,而且在进化过程中就已得到了很好的解决,人类应从生物界得到有益的启示。
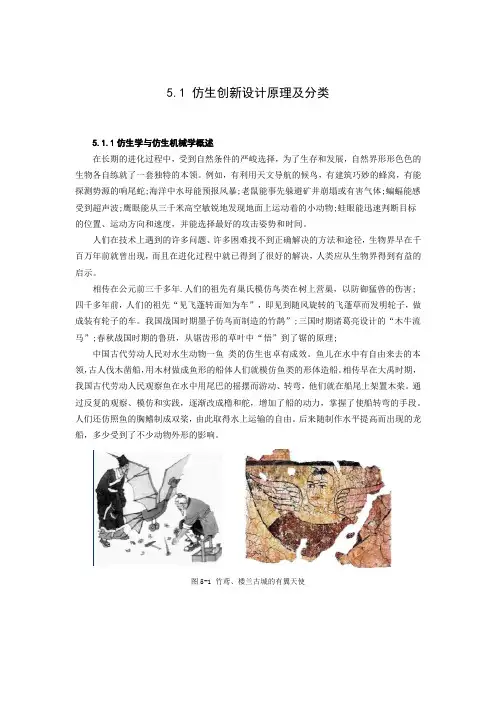
相传在公元前三千多年.人们的祖先有巢氏模仿鸟类在树上营巢,以防御猛兽的伤害;四千多年前,人们的祖先“见飞蓬转而知为车”,即见到随风旋转的飞蓬草而发明轮子,做成装有轮子的车。
我国战国时期墨子仿鸟而制造的竹鹊”;三国时期诸葛亮设计的“木牛流马”;春秋战国时期的鲁班,从锯齿形的草叶中“悟”到了锯的原理;中国古代劳动人民对水生动物一鱼类的仿生也卓有成效。
鱼儿在水中有自由来去的本领,古人伐木凿船,用木材做成鱼形的船体人们就模仿鱼类的形体造船。
相传早在大禹时期,我国古代劳动人民观察鱼在水中用尾巴的摇摆而游动、转弯,他们就在船尾上架置木桨。
通过反复的观察、模仿和实践,逐渐改成橹和舵,增加了船的动力,掌握了使船转弯的手段。
人们还仿照鱼的胸鳍制成双桨,由此取得水上运输的自由。
后来随制作水平提高而出现的龙船,多少受到了不少动物外形的影响。
图5-1 竹鸢、楼兰古城的有翼天使图5-2 木牛流马、龙舟研究生物系统的结构和特征、并以此为工程技术提供新的设计思想、工作原理和系统构成的科学,称为仿生学(bionics)。
仿生学不是仅仅外形相似即可,有些外形相似的仿造很失败,有些外形不像但是结构原理一致的仿生很成功。
图5-3 仿生结构5.1.2 仿生机械分类仿生机械(bio-simulation machinery),是模仿生物的形态、结构、运动和控制,设计出功能更集中、效率更高并具有生物特征的机械。
一种仿生蝴蝶扑翼飞行器及其拉线式转向机构的制作方法仿生蝴蝶扑翼飞行器是一种通过模仿蝴蝶独特的飞行方式而设计的飞行器。
它能够在空中灵活操控,具有较好的机动性能和稳定性。
在本文中,将介绍一种制作仿生蝴蝶扑翼飞行器及其拉线式转向机构的方法。
首先,我们需要准备一些材料和工具。
材料包括轻质的材料如薄金属片或塑料片,弹性线或者细线,小型电机,螺旋桨等。
工具则包括剪刀,胶水,钳子,锉子等。
1. 制作翅膀:使用剪刀将薄金属片或塑料片剪成蝴蝶翅膀的形状,大小可自行决定。
确保两个翅膀相对称,并且具有足够的扑翼空间。
然后使用锉子修整翅膀的边缘,使其光滑,减少空气阻力。
最后使用胶水将两个翅膀连接在一起,并且确保翅膀能够自由地扑动。
2. 安装电机和螺旋桨:选择一个小型电机并安装在飞行器的中心位置上。
将螺旋桨固定在电机轴上,确保可以有效地产生推力。
3. 制作拉线式转向机构:在飞行器的尾部或机身两侧的翅膀上,通过胶水或螺丝固定一个小轴。
使用弹性线或者细线将此小轴连接到电机上。
当电机旋转时,它将通过拉线转动翅膀,实现方向的改变。
完成以上步骤后,我们就成功地制作了仿生蝴蝶扑翼飞行器及其拉线式转向机构。
在使用时,只需将电机连接到能源供应,并确保翅膀可以自由地扑动。
通过控制电机的转动速度和方向,我们可以实现飞行器的正常飞行以及转向。
总结:仿生蝴蝶扑翼飞行器及其拉线式转向机构的制作方法相对简单,只需准备适当的材料和工具,并按照上述步骤进行操作即可。
这种飞行器的设计灵感来自于蝴蝶的飞行方式,具有较好的机动性能和稳定性。
通过不断改进和调整,希望能够进一步完善这种仿生飞行器,并应用到更多实际应用场景中。
苏教版五年级下册科学知识点整理第二单元仿生5.生物的启示生物在长期进化的过程中,形成了许多有利于生存的形态结构和生理特点,人们从中获得很多启示。
课本14页的四种物品的设计与动植物的形态结构有什么相似之处?铁丝网和植物茎上的刺的尖锐部分都能起到保护作用;塑料吸盘和八爪鱼的吸盘都呈碗状,具有吸附功能;尼龙搭扣上的弯钩和苍耳果实上的钩刺都有很强的附着力;降落伞与带冠毛的蒲公英种子的整体形状相似。
除此之外,还有锯子与锯齿草、大跨度建筑屋顶架构与王莲叶、人工冷光与萤火虫的光、风暴预测仪与水母耳、电子蛙眼与蛙眼等。
公元4世纪,古希腊数学家佩波斯提出猜想:截面呈正六边形的密铺(不留空隙,也不相互重叠)的蜂窝巢房,是蜜蜂采用最少量的蜂蜡建成的。
这一猜想被称为“蜂窝猜想”。
在同种正多边形中,能密铺的只有正三角形、正方形、正六边形。
虽然圆柱体抗压能力最强,但在平面密铺的基础上,圆形最终会被挤压成六边形。
所以在正三棱柱、正四棱柱、正六棱柱三种之中,正六棱柱的抗压能力最强。
蜂窝的横截面呈正六边形的形状.不留空隙,也不互相重叠,是密铺而成。
而且蜂窝的巢房是蜜蜂采用最少量的蜂蜡建造而成的。
假设我们想用相同形状和大小的图形密铺一个平面(使图形不留空隙、也不互相重叠地铺满整个平面),那么只有3种正多边形可以做到:正三边形、正四边形和正六边形。
(这里指规则镶嵌)在铺满同等面积的情况下,使用正六边形所需要的周长之和最小。
这就不难理解蜜蜂为什么会选择六边形了,因为蜂巢是用蜂蜡做的,而蜜蜂产出蜂蜡是消耗能量的,它们当然希望省些力气——这点小心思就跟打工人想少搬几块砖一样。
假如你是蜜蜂,你会选择哪种形状的蜂巢?为什么?假如我是蜜蜂,我会选择建造正六边形的蜂巢。
因为正六边形的蜂巢有三大优点:第一,每个蜂房都是密铺的,既不留空隙,也不相互重叠;第二,正六边形的蜂巢用料最少,可以采用最少量的蜂蜡建成最大的蜂巢;第三,正六边形的蜂巢抗压能力最强。

鱼尾摆与扑翼的仿生建模作者段霄驰包钢一中内蒙古包头市 014010[摘要]仿生学的诞生与发展加快了人类探索未知世界的步伐,人类在仿生学的诸多领域取得了非常骄人的成绩,其中尤以仿鱼、仿鸟的研究最为久远,也最为广泛。
上世纪初美国的莱特兄弟发明了飞机,人类的飞天梦得以实现,仿生研究开始进入了实质性的理论研究阶段。
实际上,人类的仿生行为由来已久,摇橹摆渡,放飞风筝,都是仿生学的杰作。
不过,仿生学的真正兴起却始于上世纪六、七十年代,由于交通运输的需要,由于军事的需要,极大的推动了仿生学的研究, 空气动力学、流体力学就是在这样的环境背景下快速发展,并逐渐趋于完善。
目前,固定翼飞行器、旋翼飞行器、大型舰艇船只的推进技术已经比较成熟,但扑翼飞行器与仿生鱼的研究还有待于进一步探究。
本文从鱼和鸟的运动机能出发,着眼于鱼游动与鸟飞行的动力原理,提出全新的建模理念:(1)鱼尾摆与扑翼应为弹性结构,而非一些专利文件和相关资料所述的刚性或柔性结构;(2)建立简单可行的数学、物理模型;(3)创建应用模型,构造新的驱动模式,进行优化仿生;(4)仿生就是仿形、仿理、仿自然。
本文拟将通过分析鸟和鱼的运动机理,从理论和实践两方面对鱼尾摆和扑翼的仿生建模进行阐述,力求在仿生领域独树一帜,引领潮流.[关键词]鱼尾摆;扑翼;弹性;建模;优化仿生一.仿生学概述什么是仿生学?仿生学仿什么?怎么仿?仿生学就是模仿生物的某种构造和功能,用来提高工程技术的综合指标和性能。
模仿蜻蜓、苍蝇的视觉原理,我们发明了电子复眼;模仿海豚、蝙蝠的探物机理,我们发明了声纳雷达;模仿鸟的飞行效果,我们发明了飞机(包括固定翼飞机,旋翼飞机和扑翼飞机)。
但人类在仿生学的进程中并非一帆风顺,一路凯歌。
我们知道,鱼、鸟、蜻蜓是没有思维能力的,它们游动、飞行、视物都是出于自然的本能反应,而自然本能的东西应该是最简单、最直接、最省时省力的方式。
仿生就是模仿生物的形态、构造等几何属性,就是模仿生物的运动变化机理,就是模仿生物自然本能的东西,简言之就是仿形、仿理、仿自然。

仿生扑翼式飞行器2013年9月7日摘要随着航空技术的发展,微型与小型飞行器以其灵活轻便、成本低廉等优点受到研发者的青睐。
相对于大型固定翼、旋翼飞行器,微、小型扑翼机在低空探测、突然袭击、认知搜救、城市作战等方面有着无法比拟的优势。
微、小型扑翼飞行器尚处于初期研发阶段,目前均以仿生学为基础,多数模仿蜻蜓、蜜蜂等昆虫的扑翼原理,而对仿鸟类扑翼飞行器的研究涉及甚少。
鸟类较昆虫有更强的环境适应能力,尤其是恶劣气候环境,且鸟类具有一定量的载重能力,方向调节性能更佳。
该项技术并没有进入实用化阶段,我们有幸成为探索者之一。
在这个项目中我们不一定能做出一架高性能的扑翼机来,但我相信这一定是一个很有启发意义的探索。
关键词:仿生,仿鸟,扑翼机,小型飞行器AbstractWith the development of aviation technology, the micro and small vehicle with the advantages of flexibility, portability and low costhasgained R &D’s pare to the large fixed wing aircraft androtorcraft, microandsmall ornithopter has incomparable advantages in terms of low altitude detection, surprise attack, cognitive search and rescue, andcity operation. Micro, small ornithopter is still in the initial stage of development, currently basesonbionics flapping theory. Most ornithopters imitate dragonfly, bees and other insects, with study of ornithoptersimitatingbirdslittle involved. Birds have a stronger ability to adapt to the environment, especially the harsh climate, andtheircontrol performance is betterthan insects. Moreover, the birds have a certain amount of load capacity.As the technology has not entered the practical stage, we are honored tobecome one of the explorers. In this project, we may beunable to make a high performance aircraft, but I believe that it must be a very instructive exploration.Key words:Bionics, Bird-imitation, Ornithopter, Small aircraft目录目录 (iii)第一章绪论 (1)1.1选题背景 (1)1.2研制重点难点 (2)第二章国内外研发状况 (6)2.1国外研发状况 (6)2.2国内研究情况 (12)第三章作品设计论述 (15)3.1创意构想及三维模型制作 (15)3.1.1概述 (15)3.1.2翅膀扑打运动的实现机构 (15)3.1.3二级齿轮减速器 (17)3.1.4翼型 (19)3.1.5翅膀的扭转 (20)3.1.6尾翼 (20)3.2内部电路 (21)3.2.1电源部分 (21)3.2.2直流电机 (21)3.2.3舵机 (22)3.2.4控制板 (22)第四章应用前景 (24)4.1特点 (24)4.2应用前景 (24)结论 (26)参考文献 (27)致谢词 (28)附录 (29)图1亚氏悬挂式滑翔机外观图 (6)图2亚氏悬挂式滑翔机人类进行飞行示意图 (7)图3亚氏悬挂式滑翔机机构简图 (7)图4史氏玩具飞机扑翼结构 (8)图5史氏玩具飞机机构简图 (8)图6D ELAURIER拍扑机 (9)图7昆虫胸腔剖面示意图 (9)图8麦氏扑翼机扑翼机构 (10)图9麦氏扑翼机机构简图 (10)图10肯式扑翼机扑翼机构 (11)图11肯式扑翼机机构简图 (11)图12M ADANGOPAL微扑翼机构 (12)图13詹秀玲飞鸟玩具整体构造图 (13)图14詹秀玲飞鸟玩具扑翼机构 (13)图15詹秀玲飞鸟玩具机构简图 (13)图16两自由度胸腔式扑翼驱动机构简图 (14)图17压电驱动的仿生微扑翼机构 (14)图18创意整体三维概念模型 (15)图19翅膀扑打运动的实现机构 (17)图20二级齿轮减速器 (18)图21齿轮减速局部视图 (19)图22翼型 (20)图23尾翼 (21)图24舵机控制板外形 (22)图25控制软件 (23)第一章绪论1.1 选题背景我们处在高科技时代,科技文明迅速发展,市面上诸多商品都朝轻、薄、短、小的目标迈进,如手机、随身听、电脑等等,当然应用于军事上的微型飞行器亦是如此。
西北工业大学博士学位论文微型扑翼飞行器的仿生翼设计技术研究姓名:***申请学位级别:博士专业:机械设计及理论指导教师:***20070101西北工业大学博士学位论文第一章绪论问和建筑物上方的敌情,还可以穿堂入室查找建筑物内部的敌情,甚至可停留在窗户上窃听办公室内的谈话,获取重要情报。
(3)电子干扰、通信中继。
微型飞行器可以非常靠近目标区侦察敌方信号,对敌方雷达、通信设备工作区实施干扰,还能够检测和维护通讯线路,提供通信中继。
(4’)核、生化探测。
进入核污染与生化禁区执行探测与取样等特殊任务。
(5)精确投放。
包括用指示器标记目标,例如红外反射涂料或一种无线电频率标记,以使射入的军火能够“看到”目标,或者投放微型地面传感器。
(6)民用领域。
微型飞行器除了军事应用外,在民用领域也有广泛的应用潜力,如野外作业人员的勘测,通信,自然灾害的监视与支援.环境和污染监测,以及公安保安部门的缉毒、边境巡逻与控制等。
1。
1.2几神典型的微型飞行器国内外目前研制的微型飞行器,按其飞行原理与布局方式划分大致可分为以下三种:固定翼(Fixed砸ng)微型飞行器、旋翼型(Rotarywin曲微型飞行器和扑翼型(FlappiIlg谢n曲微型飞行器。
其中的固定翼和旋翼型微型飞行器由于更接近常规飞机,研制难度相对较小,因此这两种MAv的研究较多也比较成功。
●典型的固定翼微型飞行器(a)BlackWidow(b)MicroStar(c)柔性固定萁M^V图1.1固定翼微型飞行器B1ackwidow(黑寡妇)如图1.1(a)是美国A_eroⅥro唧ent公司严格按照DA耻'A提出的特定技术指标而研制的一种微型飞行器【3J。
该机为飞翼式微型飞行器,外型类似予盘状飞碟,由微电机驱动前置螺旋桨产生拉力。
其翼展15厘米,起飞重量80克。
该机也是第一种广为人知的MAV。
MicroStar(微星)如图1.1(b)是美国Lockhe以Mani公司在DARPA支持下发展的一种飞翼式微型飞行器l射。