玻璃清洁机器人吸附机构设计毕业设计论文
- 格式:doc
- 大小:3.91 MB
- 文档页数:36
摘要玻璃清洗机是玻璃生产中必不可少的设备,清洗大面积曲面玻璃是目前玻璃清洗技术的难题。
本文所述的研究工作,是对清洗大面积曲面玻璃的清洗机电气控制系统进行设计。
目的在于通过电气控制系统设计,实现大面积曲面玻璃自动或手动完成清洗、吹干、旋转等工作过程的自动控制,并能通过人机界面动态显示现场数据,实现操作人员对设备的控制。
本文的主要工作包括以下几方面:首先,介绍玻璃清洗机的组成和结构,分析清洗机的工作过程,从而制定各工作过程的控制要求。
其次,根据上述控制要求,设计清洗机电气控制系统总体方案。
包括电气控制系统原理图设计、驱动系统和检测系统设计、PLC与人机界面的连接、交流调速系统的设计等。
再次,进行了电气控制系统的硬件设计和软件设计。
硬件设计主要包括主要电气元件的计算和选型、变频器的选型和参数设计、软启动器的选型、PLC的选型、触摸屏的选型等。
软件设计主要包括PLC的程序结构设计和触摸屏软件设计。
最后,进行了电气系统的安装和调试。
通过电气控制系统的调试和运行,验证了本文所设计的电气控制系统能满足清洗机的工作要求。
本文采用PLC完成数据采集和生产工艺过程的控制,采用触摸屏实现监控,达到了让玻璃清洗机按照生产工艺要求清洗大曲面玻璃的目的,提高了玻璃清洗质量和生产效率,降低了能耗。
实际运行表明,所设计的系统具有自动化程度高、可靠性高和人机交互友好等特点。
关键词:清洗机,电气控制系统,PLC,触摸屏AbstractThe glasses cleaning machine is necessary equipment in glasses production.Washing large一area glasses with curved face is one of the unresolved problems in thecurrent glasses一cleaning technologies. This research work is the design on electricalcontrol system of the glasses cleaning machine which washes large一area glasses withcurved face. The purpose of the design is to realize the automatic and manual processcontrols of cleaning, blow一drying and rotating, display measured data real-timely andcontrol the equipment by means of HMI (Human Machine Interface).The mainresearch works of this paper are as follows:First, the components and configuration of the glasses cleaning machine wereintroduced. The work processes of the machine were analyzed. The controlrequirements for those processes were decided.Secondly, the general project of electrical control system of the machine wasdesigned according to the requirements mentioned above. It include the design ofelectrical principle scheme, the design of driving and measuring systems, connectionsbetween PLC and HMI, and the design of AC timing system etc.Thirdly, the hardware and software of the electrical control system weredesigned. The hardware design mainly include the calculation and selection ofelectrical components, the selection and parameter design of frequency changer, andthe selection of soft一starter, PLC and touch screen. The software designs includedesign of PLC program, touch screen software.Finally, the electrical control system were installed and tested. The experimentsand running verified that the requirements of the glasses washing machine can besatisfied.In this paper, PLC was adopted to collect measured data, and to control theproduction process, and the touch screen was used to monitor and control. Thepurpose that the glasses cleaning machine washes large一area glasses with a curvedface according to the requirements of production technology was achieved. The目录摘要....................……。
蜘蛛型玻璃清洗机器人的设计作者:张裕佳伍伟来源:《软件工程》2016年第01期摘要:针对当前人工清洗玻璃时,存在危险性高、难度大、效率低等问题,设计了玻璃清洗机器人,具体阐述了各个组成部分的结构和工作原理,给出了结构框图和部分电路原理图,最后通过实验对机器人在玻璃壁面上的行走适应情况以及壁面清洗效果进行了测试,从测试情况可以看出,该机器人具有重量轻、体积小、清洗效果好、控制方便等特点,有较好的市场推广和应用价值。
关键词:清洗;机器人;蓝牙;吸附;设计中图分类号:TN710 文献标识码:A1 引言(Introduction)随着经济的不断发展,许多高楼大厦平地而起,但同时又带来了一个问题,那就是大厦玻璃的清洗,目前还主要靠人工清洗[1],可是人工清洗危险性很高、操作繁琐、难度较大、效率低[2,3],本文设计了一种玻璃清洗机器人,能代替人工进行玻璃清洗工作,经测试获得了较好的效果,有一定的实用价值。
2 整体硬件设计(Design of the overall hardware)设计的整体框图如图1所示,它主要由地面站(手机或电脑等有蓝牙模块的装置)、HC-06蓝牙模块、89C52单片机为核心的控制电路、以电磁阀和真空产生器为驱动模块和由两个双出杆双作用气缸和8个真空吸盘气缸的运动系统组成。
其中使用手机蓝牙串口客户端发出指令信息到和51单片机连接的蓝牙模块,单片机判断指令并执行相应子程序,发出相应的控制信号控制电磁阀的开关从而达到控制与之连接的气缸的伸出抽入,以达到机器人上、下、左、右运动的目的。
在这个移动过程中,由机器人身上所带有的清洗刷进行移动擦洗,安全保护系统主要是保证物品升降移动正常运行,最大限度的降低意外事故的发生几率。
图1 整体设计框图Fig.1 The overall design diagram3 控制芯片的选择(The choice of control chip)考虑STC89C51RC/RD+系列单片机具有宽工作电压3.4V—6V,超强抗干扰、高速、低功耗、无法解密、指令代码完全兼容传统8051、12时钟和6时钟模式可任意选择的特点[4,5]。
基于Pro/E的清洁机器人爬壁机构设计在国内外已有研究基础上,本文基于Pro/E软件设计清洗玻璃幕墙等壁面的爬壁机器人,对其爬壁构造进行分析研究。
本文所设计的机器人为四轮小车型爬壁机器人,应用传统机械传动机构的开闭合来实现吸排气的控制。
其驱动方式为后轮驱动,吸附方式采用地面连接真空泵,通过真空吸盘吸附,使吸附力更稳定且易于控制。
最终所设计的机器人在水平面与垂直面乃至任意角度的玻璃壁面均能自由行走。
标签:真空吸附;清洁机器人;Pro/E0 引言近年來,我国的城市面容发生了巨大的改变。
相比于以前,高楼大厦多了很多,大部分的高楼为了美观和成本,墙壁都是玻璃幕墙,提高了外观,但也面临着各种问题。
其中高空玻璃幕墙的清洁是一个非常典型的难题,目前清洁玻璃幕墙的方式大多是人工进行,采用悬吊装置上下升降,保洁人员亲自在高空进行作业,这种劳动效率低下,安全性没有保障,不符合当前社会发展观[1]。
于是爬壁清洁机器人应运而生,在某些危险、繁重、枯燥的岗位使用机器人代替人工劳动的行为,已逐渐发展成当代社会的一种趋势。
爬壁机器人的设计,必须具备两种功能:在任意角度的无磁甚至凹凸不平的壁面上的吸附功能和移动功能。
以此为要求,这些年来研究人员研发了多种爬壁机器人的方案,但大多有瑕疵和不稳定性,不能成功的投入工作。
例如磁力吸盘爬壁机器人,只能局限于吸附在金属的壁面上,而目前需要工作的大多是玻璃面,局限性太高;又例如大型悬挂式清洁机器人,占地面积过大、清洗复杂成本高,工作时需要特定的轨道[2]。
1 爬壁机器人的方案设计本文设计的机器人为真空吸盘式爬壁清洁机器人,因为要在垂直的壁面上行走,所以四轮小车相对于其它小车更具有稳定性。
该四轮小车(约为500mm×100mm×400mm),每个车轮都分两排,每排12个,共装有24个真空吸盘,通过地面上的真空泵提供压力进行吸附工作。
故本机器人不需要楼梯悬挂系统,直接通过机械传动机构吸排气进行控制。
1 前言1.1 课题设计背景和题目要求近年来,随着计算机技术与人工智能科学的飞速发展,智能机器人技术逐渐成为现代机器人研究领域的热点。
其中,服务机器人开辟了机器人应用的新领域。
服务机器人的出现主要有三大原因:一是劳动力成本的上升;二是人类想摆脱枯燥乏味的体力劳动,如清洁、家务、照顾病人等;三是人口的老龄和社会福利制度的完善也为某些服务机器人提供了广泛的市场应用前景。
服务机器人区别于工业机器人的一个主要特征就是服务机器人是一种适用于具体的方式、环境及任务过程的机器人系统,其活动空间大,具有在非结构环境下的移动性,因此服务机器人大多数是移动机器人。
自动进行房间地面清洁的自主吸尘式家庭服务机器人,集机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能等诸多学科为一体。
自主吸尘机器人作为智能移动机器人实用化发展的先行者,其研究始于20 世纪80 年代,到目前为止,已经产生了一些概念样机和产品。
吸尘机器人的发展,带动了家庭服务机器人行业的发展,也促进了移动机器人技术、图像和语音识别、传感器等相关技术的发展本次设计的题目<< 家庭清洁机器人>>就是在这种背景下提出的,其具体设计要求如下:设计家庭清洁机器人的工作内容和要求:运行机构形式:轮式最高行进速度:0.5 m/s 转弯半径:0 高度:<100mm 宽度:<400mm 清洁方式:吸尘、刷扫一次充电连续工作时间:0.5 小时警示方式:LED 闪光具有自动路径规划、避障功能具有自动充电装置。
1.2 国内外相关产品研究学海无涯苦作舟!地面清洁机器人作为智能移动机器人实用化发展的先行者,其研究始于 世纪80年代,到目前为止,已经产生了一些概念样机和产品。
吸尘机器人的发 展,带动了家庭服务机器人行业的发展,也促进了移动机器人技术、图像和语音 识别、传感器等相关技术的发展。
现结合国内外的文献将清扫机器人及其自动充 电技术的发展现状阐述如下。
高空玻璃清洗机器人的设计与研究张栋楠;李华光【摘要】随着国家新型城镇化建设进程的不断推进,各类城市高层建筑不断挺拔而出.随之而来的是一系列的问题,如外窗清洁维护.采用人工方式,由于清洁行业起步较晚,"蜘蛛人"多是外来务工人员,流动性大,没有细致的行业细分且存在安全隐患.为了保障人员安全以及提高服务效率,高空玻璃清洁机器人将广泛投入城市使用.本设计是一个将装置驱动部分放置于屋顶、51单片机控制,通过红外线传感器附加臂,一种多吸盘组交替吸附工作、工作部框架式移动紧贴下放于窗外进行清洗的智能化、自动化的外窗清洗机器人,具有制造相对容易、性价比高、放置于建筑顶层方便安全的优点,能够更好地深入人民大众的生活场所,给人们的日常生活带来极大的便利.【期刊名称】《科技视界》【年(卷),期】2018(000)017【总页数】2页(P16-17)【关键词】高空玻璃清洁机器人;51单片机;红外线传感器;智能化【作者】张栋楠;李华光【作者单位】青岛黄海学院,山东青岛 266427;青岛黄海学院,山东青岛 266427【正文语种】中文【中图分类】TP2420 引言随着城镇化建设的不断加快,高层建筑外窗清洁维护工作等问题日益凸显,这就为高空玻璃清洁机器人提供了较大的发展空间。
由于高空玻璃清洁机器人设计复杂,编程困难,工作量大。
目前,传统的设计方法往往效率低,精度低。
现代高性能高空玻璃清洗机器人的设计要求很难满足,将产生一系列智能产品投入市场。
高空玻璃清洁机器人,比起普通擦窗机与人工作业,它不仅安全系数有了很大的提高,而且工作效率也有了很大的提升。
对此,团队在设计基础上进行了创新和理论性方面研究。
高空玻璃清洗机器人的研制成功,将会实现清洗作业的自动化,给清洗业带来一次新的革命。
1 机体总体方案设计为设计高空玻璃清洗机器人,机器人必须要具有在壁面上吸附和移动功能,以保障他人安全以及设备自身安全;此外还应该具有相应的清洗工作部、控制模块以及高压气体、水等的供应功能。
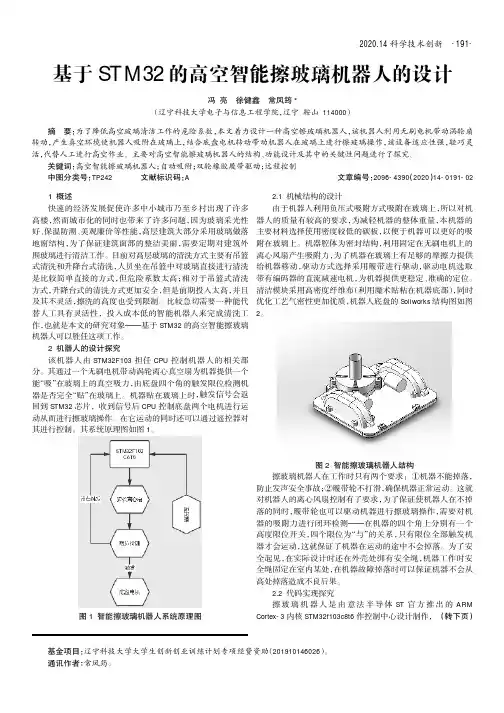
2020.14科学技术创新基于STM32的高空智能擦玻璃机器人的设计冯亮徐健鑫常凤筠*(辽宁科技大学电子与信息工程学院,辽宁鞍山114000)1概述快速的经济发展促使许多中小城市乃至乡村出现了许多高楼,然而城市化的同时也带来了许多问题,因为玻璃采光性好、保温防潮、美观廉价等性能,高层建筑大部分采用玻璃做落地窗结构,为了保证建筑面部的整洁美丽,需要定期对建筑外围玻璃进行清洁工作。
目前对高层玻璃的清洗方式主要有吊篮式清洗和升降台式清洗,人员坐在吊篮中对玻璃直接进行清洗是比较简单直接的方式,但危险系数太高;相对于吊篮式清洗方式,升降台式的清洗方式更加安全,但是前期投入太高,并且及其不灵活,擦洗的高度也受到限制。
比较急切需要一种能代替人工具有灵活性,投入成本低的智能机器人来完成清洗工作,也就是本文的研究对象———基于STM32的高空智能擦玻璃机器人可以胜任这项工作。
2机器人的设计探究该机器人由STM32F103担任CPU 控制机器人的相关部分。
其通过一个无刷电机带动涡轮离心真空扇为机器提供一个能“吸”在玻璃上的真空吸力,由底盘四个角的触发限位检测机器是否完全“贴”在玻璃上。
机器贴在玻璃上时,触发信号会返回到STM32芯片,收到信号后CPU 控制底盘两个电机进行运动从而进行擦玻璃操作。
在它运动的同时还可以通过遥控器对其进行控制。
其系统原理图如图1。
图1智能擦玻璃机器人系统原理图2.1机械结构的设计由于机器人利用负压式吸附方式吸附在玻璃上,所以对机器人的质量有较高的要求,为减轻机器的整体重量,本机器的主要材料选择使用密度较低的碳板,以便于机器可以更好的吸附在玻璃上。
机器腔体为密封结构,利用固定在无刷电机上的离心风扇产生吸附力,为了机器在玻璃上有足够的摩擦力提供给机器移动,驱动方式选择采用履带进行驱动,驱动电机选取带有编码器的直流减速电机,为机器提供更稳定、准确的定位。
清洁模块采用高密度纤维布(利用魔术贴粘在机器底部),同时优化工艺气密性更加优质,机器人底盘的Soliworks 结构图如图2。
擦玻璃机器人设计方案一、引言玻璃清洁是一项繁琐的任务,尤其是在高楼大厦的外墙上。
为了解决这个问题,我们设计了一种擦玻璃机器人,旨在提高清洁效率、降低工作风险。
本文将详细介绍该机器人的设计方案。
二、机器人结构设计1.底盘设计机器人底盘采用轮式结构,以提高运动灵活性和平稳性。
底盘采用防滑材质,以确保机器人在玻璃表面行驶时更加稳定。
2.擦拭装置擦拭装置由一对可旋转的擦拭臂和擦拭垫组成。
擦拭臂的材质选择耐磨损的合成纤维,以确保长时间使用不会导致擦拭效果下降。
擦拭垫采用微纤维材质,具有较强的吸水性和吸附力,能够快速并有效地清洁玻璃表面。
3.导航系统机器人配备先进的导航系统,采用激光雷达和摄像头进行环境感知和位置识别。
通过激光雷达和摄像头的数据融合,机器人能够准确地感知到玻璃表面的位置和障碍物,并根据预先设定的路径规划进行移动。
4.能源供应机器人搭载高能效锂电池,确保持续工作时间较长,并可通过充电站进行充电。
充电站可根据机器人的当前位置和电池电量智能调配,提供稳定可靠的能源供应。
三、机器人工作流程1.定位与路径规划机器人首先通过导航系统识别玻璃表面的位置,并根据预设的清洁路径规划合理的擦拭路线,确保全面覆盖。
2.擦拭过程机器人依次移动至不同位置,并将擦拭臂伸展到玻璃表面。
擦拭臂旋转后,擦拭垫能够有效清除玻璃表面的污垢和灰尘。
3.障碍物识别与规避如果机器人在擦拭过程中感知到突出的障碍物,导航系统会通过实时计算和分析,调整移动路径以绕过障碍物,保证机器人的正常工作。
4.清洁结果反馈机器人清洁完成后,导航系统会发送清洁结果给操作人员。
同时,机器人还能够记录清洁过程中的异常情况,并生成报告,以便后续处理和分析。
四、安全性设计1.紧急停止装置机器人配备紧急停止按钮,一旦出现异常情况,操作人员可以立即按下按钮,停止机器人的运动,确保人员和设备的安全。
2.防坠落装置机器人底盘装有重力传感器和倾斜传感器,一旦检测到机器人越过安全边界和倾斜角度,相应的报警机制将触发,防止机器人坠落。
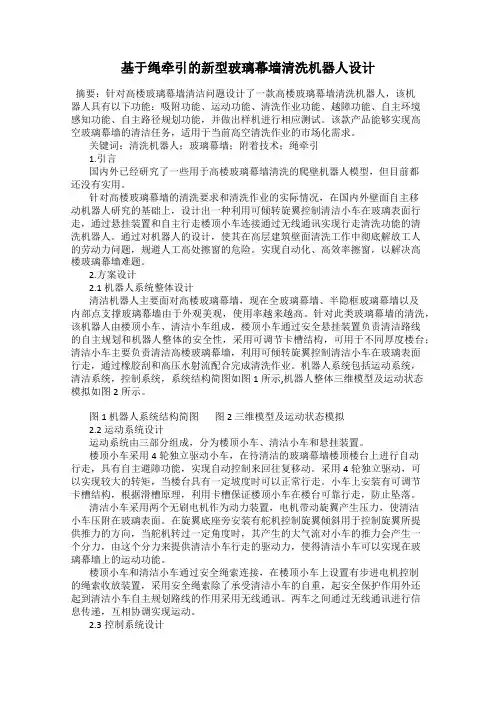
基于绳牵引的新型玻璃幕墙清洗机器人设计摘要:针对高楼玻璃幕墙清洁问题设计了一款高楼玻璃幕墙清洗机器人,该机器人具有以下功能:吸附功能、运动功能、清洗作业功能、越障功能、自主环境感知功能、自主路径规划功能,并做出样机进行相应测试。
该款产品能够实现高空玻璃幕墙的清洁任务,适用于当前高空清洗作业的市场化需求。
关键词:清洗机器人;玻璃幕墙;附着技术;绳牵引1.引言国内外已经研究了一些用于高楼玻璃幕墙清洗的爬壁机器人模型,但目前都还没有实用。
针对高楼玻璃幕墙的清洗要求和清洗作业的实际情况,在国内外壁面自主移动机器人研究的基础上,设计出一种利用可倾转旋翼控制清洁小车在玻璃表面行走,通过悬挂装置和自主行走楼顶小车连接通过无线通讯实现行走清洗功能的清洗机器人。
通过对机器人的设计,使其在高层建筑壁面清洗工作中彻底解放工人的劳动力问题,规避人工高处擦窗的危险。
实现自动化、高效率擦窗,以解决高楼玻璃幕墙难题。
2.方案设计2.1 机器人系统整体设计清洁机器人主要面对高楼玻璃幕墙,现在全玻璃幕墙、半隐框玻璃幕墙以及内部点支撑玻璃幕墙由于外观美观,使用率越来越高。
针对此类玻璃幕墙的清洗,该机器人由楼顶小车、清洁小车组成,楼顶小车通过安全悬挂装置负责清洁路线的自主规划和机器人整体的安全性,采用可调节卡槽结构,可用于不同厚度楼台;清洁小车主要负责清洁高楼玻璃幕墙,利用可倾转旋翼控制清洁小车在玻璃表面行走,通过橡胶刮和高压水射流配合完成清洗作业。
机器人系统包括运动系统,清洁系统,控制系统,系统结构简图如图1所示,机器人整体三维模型及运动状态模拟如图2所示。
图1 机器人系统结构简图图2 三维模型及运动状态模拟2.2 运动系统设计运动系统由三部分组成,分为楼顶小车、清洁小车和悬挂装置。
楼顶小车采用4轮独立驱动小车,在待清洁的玻璃幕墙楼顶楼台上进行自动行走,具有自主避障功能,实现自动控制来回往复移动。
采用4轮独立驱动,可以实现较大的转矩,当楼台具有一定坡度时可以正常行走。
玻璃壁面清洗机器人负压吸附系统的研究针对玻璃壁面清洗机器人风机噪声大和吸附稳定性问题,通过变形设计和实验研究方法,设计出适合玻璃壁面清洗的负压吸附系统,并分析了负压吸附原理,给出了与吸附系统相配合的最佳移动机构,并提出了低噪声离心风扇设计方法。
实验表明所设计的负压吸附系统能满足玻璃壁面清洁与移动的基本需求,能够适应高层建筑玻璃清洗的复杂环境。
标签:玻璃清洗;负压吸附;离心风扇;噪声污染引言壁面清洗机器人作为爬壁机器人的一种,主要在距离地面一定高度、人无法触及的建筑物竖直表面上进行工作,如高层建筑玻璃幕墙的清洗。
本文结合负压吸附技术,针对低噪声离心风扇、最佳吸附力的选取等方面进行研究,设计的机器人样机能构适应高层建筑外壁面的工况环境。
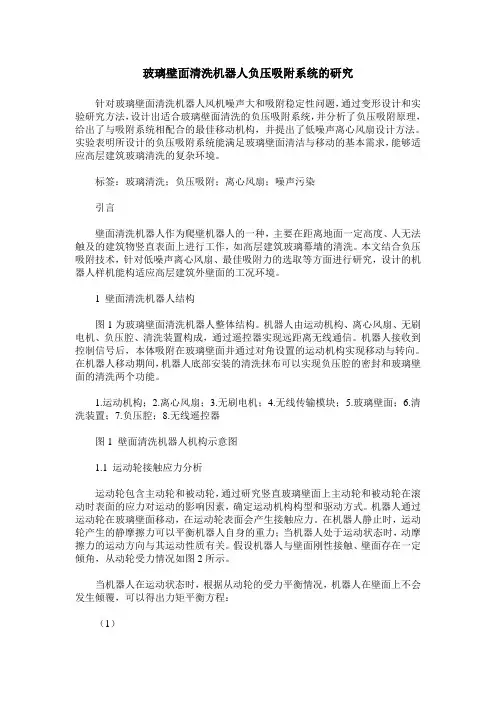
1 壁面清洗机器人结构图1为玻璃壁面清洗机器人整体结构。
机器人由运动机构、离心风扇、无刷电机、负压腔、清洗装置构成,通过遥控器实现远距离无线通信。
机器人接收到控制信号后,本体吸附在玻璃壁面并通过对角设置的运动机构实现移动与转向。
在机器人移动期间,机器人底部安装的清洗抹布可以实现负压腔的密封和玻璃壁面的清洗两个功能。
1.运动机构;2.离心风扇;3.无刷电机;4.无线传输模块;5.玻璃壁面;6.清洗装置;7.负压腔;8.无线遥控器图1 壁面清洗机器人机构示意图1.1 运动轮接触应力分析运动轮包含主动轮和被动轮,通过研究竖直玻璃壁面上主动轮和被动轮在滚动时表面的应力对运动的影响因素,确定运动机构构型和驱动方式。
机器人通过运动轮在玻璃壁面移动,在运动轮表面会产生接触应力。
在机器人静止时,运动轮产生的静摩擦力可以平衡机器人自身的重力;当机器人处于运动状态时,动摩擦力的运动方向与其运动性质有关。
假设机器人与壁面刚性接触、壁面存在一定倾角,从动轮受力情况如图2所示。
当机器人在运动状态时,根据从动轮的受力平衡情况,机器人在壁面上不会发生倾覆,可以得出力矩平衡方程:(1)式中,N-壁面对从动轮的反作用力;Fp-机器人本体作用在轮轴上的正压力;Ff-壁面对从动轮的摩擦力;Mo-墙壁对从动轮的阻力矩;T-轮轴对从动轮的作用力;r-运动轮半径。
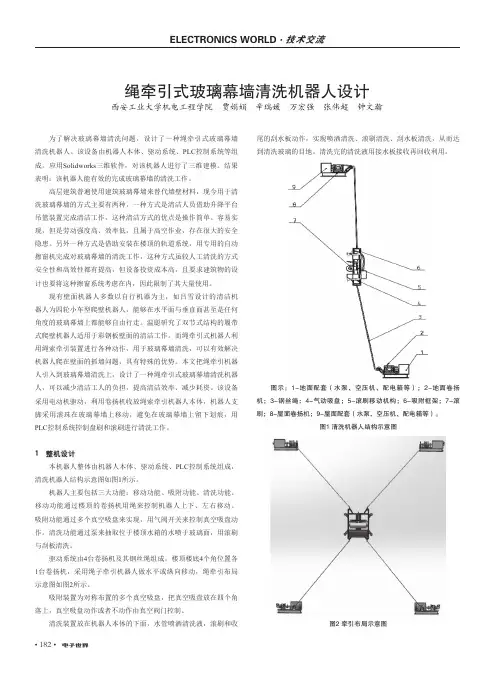
• 182•为了解决玻璃幕墙清洗问题,设计了一种绳牵引式玻璃幕墙清洗机器人。
该设备由机器人本体、驱动系统、PLC 控制系统等组成。
应用Solidworks 三维软件,对该机器人进行了三维建模。
结果表明:该机器人能有效的完成玻璃幕墙的清洗工作。
高层建筑普遍使用建筑玻璃幕墙来替代墙壁材料,现今用于清洗玻璃幕墙的方式主要有两种,一种方式是清洁人员借助升降平台吊篮装置完成清洁工作,这种清洁方式的优点是操作简单、容易实现,但是劳动强度高、效率低,且属于高空作业,存在很大的安全隐患。
另外一种方式是借助安装在楼顶的轨道系统,用专用的自动擦窗机完成对玻璃幕墙的清洗工作,这种方式虽较人工清洗的方式安全性和高效性都有提高,但设备投资成本高,且要求建筑物的设计也要将这种擦窗系统考虑在内,因此限制了其大量使用。
现有壁面机器人多数以自行机器为主,如吕雪设计的清洁机器人为四轮小车型爬壁机器人,能够在水平面与垂直面甚至是任何角度的玻璃幕墙上都能够自由行走。
温聪研究了双节式结构的履带式爬壁机器人适用于彩钢板壁面的清洁工作。
而绳牵引式机器人利用绳索牵引装置进行各种动作,用于玻璃幕墙清洗,可以有效解决机器人爬在壁面的抓墙问题,具有特殊的优势。
本文把绳牵引机器人引入到玻璃幕墙清洗上,设计了一种绳牵引式玻璃幕墙清洗机器人,可以减少清洁工人的负担,提高清洁效率、减少耗资。
该设备采用电动机驱动,利用卷扬机收放绳索牵引机器人本体,机器人支脚采用滚珠在玻璃幕墙上移动,避免在玻璃幕墙上留下划痕,用PLC 控制系统控制盘刷和滚刷进行清洗工作。
1 整机设计本机器人整体由机器人本体、驱动系统、PLC 控制系统组成,清洗机器人结构示意图如图1所示。
机器人主要包括三大功能:移动功能、吸附功能、清洗功能。
移动功能通过楼顶的卷扬机用绳来控制机器人上下、左右移动。
吸附功能通过多个真空吸盘来实现,用气阀开关来控制真空吸盘动作。
清洗功能通过泵来抽取位于楼顶水箱的水喷于玻璃面,用滚刷与刮板清洗。
家用擦玻璃清洁机器人结构设计设计说明河北工业大学毕业设计说明书作者:焦然学号:111122 学院:机械工程学院系(专业):机械设计制造及其自动化题目:家用擦玻璃清洁机器人结构设计指导者:李辉讲师(姓名) (专业技术职务)评阅者:(姓名) (专业技术职务)2015 年 5 月 31 日毕业设计中文摘要毕业设计(论文)外文摘要目录第一章引言 (1)1.1 课题背景 (1)1.2 国内外擦玻璃机器人的研究概况 (1)1.3 本课题的主要工作 (3)第二章家用擦玻璃清洁机器人总体方案设计 (3)2.1 家用擦玻璃清洁机器人的设计原则 (4)2.2 家用擦玻璃清洁机器人的总体方案的确定 (4)2.2.1 家用擦玻璃清洁机器人的总体方案 (4)2.2.2 总体方案的对比与选择 (12)第三章家用擦玻璃清洁机器人详细结构设计 (14)3.1 关键部件的选型 (14)3.1.1 电机的选型 (14)3.1.2 微动开关的选型 (15)3.1.3 电池的选择 (15)3.1.4 磁铁的选择 (16)3.2 微动开关缓冲机构的设计 (16)3.3 磁铁升降机构的设计 (17)3.3.1 磁铁升降机构的ANSYS分析 (18)第四章家用擦玻璃清洁机器人控制系统设计 (21)4.1 单片机控制系统电路的设计 (21)4.1.1 单片机系统元器件的选型 (21)4.1.2 单片机系统的硬件电路及I/O口分配 (25)4.2 单片机系统编程框图 (25)第五章家用擦玻璃清洁机器人样机研制与调试 (27)5.1控制电路板的设计与调试 (27)5.1.1 PCB设计 (27)5.1.2 电路板的调试 (28)5.2 家用擦玻璃清洁机器人样机的制作 (31)5.3 家用擦玻璃清洁机器人样机的测试 (31)第六章总结与展望 (33)参考文献 (34)致谢 (35)附录 (37)1 引言1.1 课题背景智能家居近两年发展火热,作为其重要组成部分的智能服务机器人也不甘示弱,伴随着计算机和自动化技术的迅速发展,人们对机器人的智能性的要求也越来越高,同时智能服务机器人产业近年来也陆续被写入国家发展战略。
科技与创新┃Science and Technology&Innovation ·48·2023年第24期文章编号:2095-6835(2023)24-0048-03一种十字形玻璃幕墙清洗机器人的设计郑明皓,靳凯明(山东建筑大学机电工程学院,山东济南250101)摘要:针对玻璃幕墙清洗的急需性和目前清洗存在的成本高、风险大等问题,根据真空负压吸附原理设计了一种十字形玻璃幕墙清洗机器人。
该机器人的本体结构设计为一种可折叠的十字形结构,清洗模块包括抹布系统和废水回收净化再利用装置,可提高水的利用率并且起到一定防倾覆作用。
控制系统以Arduino Mega2560单片机为主控系统,采用无线蓝牙实现远程操控,通过传感器进行自主避障检测。
实验证明,该机器人具有良好的自主清洗和防倾覆能力,可以极好地代替人工作业,为后续幕墙清洗机器人的研发提供理论参考。
关键词:幕墙清洗;真空吸附;可折叠;自主避障中图分类号:TP242文献标志码:A DOI:10.15913/ki.kjycx.2023.24.014由于玻璃幕墙的采光更加通透且冬天保温效果好,其在高楼大厦的设计中应用得越来越多[1],但要保证玻璃幕墙的透光性和美观性需要进行定时的清洗。
目前玻璃幕墙的清洗方式主要是使用高空吊篮和升降机来人工清扫,这种清洗方式不仅成本高、效率低,而且会给工作人员带来很大的工作风险[2]。
为解决这个问题,急需设计一种玻璃幕墙清洗机器人来完成玻璃幕墙的智能清洗。
CHAE等[3]根据真空负压吸附原理,设计了一种玻璃幕墙清洁机器人,该机器人具有较强的清扫能力;鄢鹏等[4]设计了一款采用涵道控制的幕墙清洗机器人,可以实现无线操控,有一定的抗风阻力和稳定性,但是涵道风扇工作时会产生很大的噪声。
上海交通大学机器人设计研究所研制出一种可以自己行走和依靠屋顶安装卷扬机构移动的玻璃幕墙清扫机器人,该清洗系统操作过程比较烦琐,而且涉及卷扬机的设备,会对运输和安装造成很大的不便[5]。
毕业论文小型清洁机器人行走机构目录1 引言 (3)1.1论文背景、意义及要求 (3)1.2国外、国内研究概况 (4)1.3市场需求预测 (6)1.4设计的重点与难点. (6)2 机器人行走机构的设计 (7)2.1 空调管道系统介绍及清洗原理 (7)2.2机器人移动载体方案设计. (8)2.2.1总体方案设计 (8)2.2.2传动方案的设计 (9)2.3 张紧机构的设计 (11)3.具体设计计算 (12)3.1移动载体传动计算. (12)3.1.1左右驱动轮传动计算 (12)3.1.2后万向轮传动计算 (20)3.2张紧启动系统的设计计算 (24)3.2.1 气缸的选择 (24)3.2.2启动辅助元件和回路的选择设计 (26)3.3传动齿轮﹑蜗轮蜗杆的尺寸计算 (27)3.4轴的设计﹑计算和校核 (27)3.5轴承的寿命计算 (32)4 机器人转弯时的管道通过性分析 (33)4.1管道机器人在水平直角弯管的通过性分析 (33)4.2管道机器人在矩形管水平圆弧形弯头的通过性分析 (35)5结构设计 (36)1引言1.1论文背景、意义及要求清洁机器人作为服务机器人领域中的一个新产品, 尽管目前国内在这方面的研究开发方面已经取得一定的成果 , 但是仍有许多关键技术问题需要解决或提高 , 行走机构就是其中的一个比较重要的技术。
有的可在房间内随机移动,但要求有一定的动力和对地面有足够大的摩擦。
事实上,虽然有一些公司推出了一些样品或产品,但却不能达到满意程度:清洁效果不佳,遍历时间长。
随着当今社会的发展,空调通风系统在日常生活中发挥着越来越重要的作用。
中央空调系统主宰着楼宇中空气的新陈代谢,被称为“建筑物之肺”。
中央空调管道在长期使用中会积累许多灰尘、病菌及放射物等,这些有害物质在送风过程中便污染了空气,长期被人体吸入,就会危害大众的健康。
因此人们在迫切要求提高生活质量的同时,要求提高工作居住场所及其他公共场所环境质量 ( 特别是空气质量 ) 的呼声也越来越急切。
第一章绪论1.1 引言随着人民生活水平的提高,现代家庭的住宅越来越宽敞,地面清洁工作量越来越大。
为了节省清洁占用时间,减轻劳动量,提高清洁工作效率和清洁度。
本文中设计了一台具有独特之处的家用自动清洁机。
目前市场上所拥有的清洁机构(本设计主要是以吸尘器作为主要的对比对象)主要是依靠电动机带动抽风机的高速运转产生极强的吸力和压力,从而使吸尘器内部产生瞬时真空吸力,与外界大气压形成压力差,从而将空气中的灰尘以及地面的污垢垃圾吸入吸尘器内。
而本文中所设计的机构则是由电动机通过齿轮的啮合带动轴的旋转,使轴上的毛刷也随之转动从而达到清洁地面的效果。
与以往的清洁机构相比较本设计的独特之处在于:一是它采用了锂电池作为能量源,每次使用完以后可以直接将电池取下充电,这样可以重复的使用,而且从用的是直流电动机,电动机的功率较低,比普通清洁机的耗电量要低很多;二是本自动清洁机的体积小,结构简洁,使用方便,不仅能够清洁开阔地面,而且能够清洁沙发、家具等占用狭小空间的地面;三是本设计的手柄与底盘相接的地方采用360度的旋转连接,这样不管是任何死角都可以清洁干净;四是本次设计机构的托盘的清洗要比吸尘器的集尘袋的清洗方便很多可以直接取出用水洗干净。
综上所述,本次设计的自动清洁机有着很高的市场研发价值以及实际使用价值。
本次设计的圆满成功可以解决许多日常生活中清洁卫生的问题,大大的减轻劳动强度,提高清洁的效率,节约成本和花费。
1.2自动清洁机的现状为了顺利圆满的完成本毕业设计,设计出独具创新的自动清洁装置,切切实实的解决日常生活中的清洁问题,我在设计之初进行了充分的市场调研,对各大超市的一些清洁机、吸尘器等用于家庭清洁的机器产品进行了了解,并且在网上进行了大量的资料搜集以及相关文献的阅读和参阅。
在调研中我发现了人们在生活中使用最多的家庭清洁装置就是吸尘器。
吸尘器又称真空吸尘器,主要部件是真空泵、集尘袋、软管及各种形状不同的管嘴,它有一个电动抽风机,通电后高速运转,使吸尘器内部形成瞬间真空,使内部的气压大大低于外界的气压,在这个气压差的作用下,尘埃和脏物随着气流进入吸尘器桶体内,再经过集尘袋的过滤,尘垢留在集尘袋,净化后的空气则经过电动机重新逸入室内,起到冷却电机、净化空气的作用。