VCII驱动器操作手册
- 格式:pdf
- 大小:6.33 MB
- 文档页数:30

L7 Servo OS Upgrade
Technical Department
LS Mecapion Automation T echnology
Ver.20131122
Technical Document
1-2
首先安装以下所示所有程序.
□为伺服驱动器调试软件
□为软件及USB驱动程序
使用USB线,将L7驱动器与电脑连接.并为驱动器上控制电. *控制电为L7驱动器接线端标有“C1、C2”的两个接线孔.
打开刚刚安装好的“LIVE-I.C.E ”软件.
4.根据需求,选择L7驱动器类型.
点击 Start 后进入操作界面.
L7 Servo OS Upgrade
找到上图中红框所示“OS”选项.
点击“OS Upgrade”出现以下提示
1-3
Technical Document
1-4
点击“OK”启动L7 Upgrader
*下载前请注意:断开驱动器动力电(即:L1、L2、L3)
确认USB线缆连接正常.
确保下载过程中驱动器控制电供电正常.
打开文件后,点击“Com Set”
当“Ready”变为激活状态后点击“Ready”
最后点击“Download”,等待“Progress”进度完成.
点击“…”找到驱动器升级所需
的“.HEX ”文件,打开.
2
1
3 4。

目录目录目录 (I)前言 (1)安全注意事项 (1)1 概况 (3)1.1 综合技术指标 (3)1.2 伺服驱动器铭牌说明 (5)1.3 各型号功率规格 (6)1.4 伺服驱动器各部件名称说明 (6)1.5 伺服驱动器的外形尺寸与安装尺寸 (7)2 开箱检查 (8)3 安装 (9)3.1 伺服驱动器运行的环境条件 (9)3.1.1 温湿度 (9)3.1.2 海拔高度 (9)3.1.3 其它环境要求 (10)3.2 伺服驱动器的安装 (10)3.2.1 安装 (10)3.2.2 安装方向与间隔 (11)3.2.3 防止异物进入 (12)4 信号与接线 (13)4.1 系统配置 (14)4.1.1 伺服驱动器与外部设备连接图 (14)4.1.2 线径选择表 (15)4.2 主回路接线(X1,X2插头) (16)4.2.1 概览 (16)4.2.2 单相220V电源输入接线图 (17)4.2.3 三相220V电源输入接线图 (18)4.3 编码器接线(CN2插头) (19)4.3.1 概览 (19)4.3.2 伺服驱动器CN2引脚排列及信号定义 (19)目录4.4 与PC或HOST的连接(CN3插头) (20)4.5 输入输出信号接线(CN1插头) (21)4.5.1 概览 (21)4.5.2 开关量输入电路接线 (22)4.5.3 脉冲量输入电路接线 (23)4.5.4 模拟量输入电路接线 (24)4.5.5 开关量输出电路接线 (25)4.5.6 编码器反馈信号分频输出电路接线 (26)4.5.7 模拟量输出电路接线 (27)4.5.8 CN1引脚排列及信号解释 (27)4.6 电磁制动器接线 (33)5 运行与操作 (34)5.1 运行 (34)5.1.1 标准接线举例 (34)5.1.2 初次接通电源 (38)5.1.3 伺服运行前自检 (39)5.1.4 伺服运行前参数设置 (39)5.1.5 点动试运行 (40)5.1.6 伺服使能 (40)5.1.7 伺服停机/停止运行 (41)5.1.8 时序图 (42)5.2 显示与操作 (46)5.2.1 显示流程 (46)5.2.2 状态显示 (48)5.2.3 参数设置 (49)5.2.4 辅助功能 (49)5.2.5 报警显示 (50)5.2.6 报警清除 (51)6 参数详细说明 (52)6.1 基本参数(PA组参数) (52)6.2 增益.滤波器参数(Pb组参数) (63)6.3 扩展参数(Pc组参数) (70)6.4 状态监视参数(Pd组参数) (82)7 增益调整 (87)7.1 参数调整的一般方法 (87)7.1.1 位置环增益调整 (89)7.1.2 速度环增益调整 (90)7.1.3 转矩环增益调整 (92)7.2 机械共振抑制 (93)7.3 增益切换功能 (94)8 通讯功能 (96)8.1 概要 (96)8.2 拓扑结构 (96)8.3 通讯协议 (97)8.3.1 协议内容 (97)8.3.2 协议说明 (97)8.3.3 通讯帧结构 (97)8.3.4 命令码及通讯数据描述 (99)8.3.5 通讯帧错误校验方式 (104)8.3.6 通讯数据地址的定义 (106)8.3.7 错误消息的回应 (107)9 故障处理 (109)9.1 故障报警代码含义及对策 (109)9.2 告警代码含义 (110)附录 (111)附录1 功能参数简表 (111)1. PA组参数(基本参数) (111)2. Pb组参数(增益.滤波器参数) (112)3. Pc组参数(扩展参数) (112)3. Pd组参数(监视参数) (114)附录2 伺服驱动器各插头信号排列图 (116)前言感谢您选用深圳市英威腾电气股份有限公司的交流永磁同步电机伺服驱动器(以下称为“伺服驱动器”)产品。
PANASERT MV2VB 操作手冊製作: 金知紅審核:一.機器操作的防護1.POWER BREAKER 處于ON狀态時,確認空氣壓力表的讀數位0.5MPA.2.不能使用空氣槍清滐機器.3.機器要定期檢查,確保機器的狀态良好.4.操作期間不要把供氣打在OFF.二.開機1.打開主電源.2.打開主控板上的MAIN CPU.3.打開OPERATIONREADY按鈕4.把模式變換到MANU.5.操作模式設置到1BLOCK6.關掉SERVOMOTOR7.確認貼頭軸在原點(64度-74度),如果不在原點,利用手輪搖到原點.8.開SERVOMOTOR9.靠近前蓋,按START按鈕清除SAFETYSTOP10.按ORG按鈕,使每根軸都回到原點11.選定生產程式,生產模式選擇到AUTO CONT,連續生產三.各部分介紹.1.顯示屏顯示操作屏2. 電源控制有相關的電源開關組成.如MAIN CPU OPERAYION READY等組成3. 操作控制包含操作模式開關,如START,RESET,ORG等4. 軟盤控制.利用軟盤中存儲的數據或轉換軟盤和設備之間的數據5. 用來輸入數據值和編程中的字符3.2 電源控制介紹1. SERVO MOTOR(伺服馬達)把開關打在伺服馬達的ON/OFF上ON: 伺服裝置進行鎖定OFF: 伺服裝置解除鎖定當伺服馬達開關為OFF時,用手工移動X,Y,Z軸,把開關打回到ON,各軸回原點2.FRONTOPERATION(前面的操作燈)指示是否能通過前面的控制板操作或不能燈亮: 前面的控制板能操作燈滅: 前面的控制板不能操作3.MAINCPU把電源擰到屏幕控制系統的ON/OFF時,主CPU的燈在閃爍,可以擰開它4.POWERON當設備上的電源在ON時,燈亮,OFF時,燈滅5.OPERATIONREADYON/OFF給控制器,AC伺服驅動裝置等供電/關電,使能操作/不能操作.MAINCPU燈在閃爍時,可以按下它6.START用來啟動生產.當其LED閃爍時,可以啟動生產7.STOP用來暫停生產.(燈是亮的)再次按下將其松開.當STOP燈亮時,按START,將只執行一步操作8.RESET根據情況,功能變換如下:當出現錯誤時:清除該錯誤狀态當不出現錯誤時:把程序的步驟返回到頂9.KEYBOARDNUM指示是否可以利用鍵盤+鍵模式10.KEYBOARDCAM指示是否可以從鍵盤輸入上面的字符11.CLEARSCREEN用來清除控制屏的屏幕.如果不需要該屏幕,可以把它清除(不影响操作和生產)12.跟蹤球左鍵用來控制方向箭頭,打開點擊.13. 方向鍵按下四個方向鍵,可以控制X,Y,TABLE前後,左右移動,或其他操作.14. ORG此按鈕可以使各軸回歸原點.四.顯示屏功能菜單介紹1. START可進行運行模式的變更和生產狀态的顯示.AUTO(全自動) SEMI (半自動) MANU (手動)CONT (連續) EOP (單片) BLOCK(單步)機器正常運行情況下選擇: AUTO+CONT 模式STATUS : 機器運行狀态下,顯示機器各軸運行的信息TYPE : 顯示生產的品種信息FEEDER: 顯示Z軸模式和FEEDER的供料運行情況2. SETUP可進行程序的選擇3. DATE IN/OUT可進行程序的存儲,輸入,拷貝,刪除,等4. EDIT進行各種程序的編輯.NC, ARRAY, PCB, MARK, PARTS等5. MANAGE顯示生產的各種信息.如WORK RATE, PICK UP RATE, MOUNT RATE等6. SYSTEM設置PANASERT機器的系統參數五. 生產機種的轉換機種切換的順序:1.按ORG原點回歸2.支撐PIN的拆卸3.在SETUP中進行程序的選擇和搬運导軌寬度的自動調整4.基準PIN的調整5.PCB STOPPER 的調整6. SUPPORT PIN 的安裝和調整7.PCB 搬運的確認8.部品上料9.檢查確認程序,部品的正確10.選擇AUTO CONT 進行生產六. 部品交換的順序1. 部品無料時顯示:ZA\ZB PARTS ENHAUST信號燈: 部品無料時,Z軸移動中------黃燈閃亮部品無料時,Z軸停止--------紅燈閃亮2. “部品交換中”的狀态確認處於”部品交換中”時,微型信號燈的綠燈閃亮3. “部品交換SW”的切換,信號燈綠燈亮4. 打開後部安全盖5. 取出用完的FEEDER,換料6. 關上安全盖7. “部品交換SW”交換信號燈綠燈滅8. 按START 重新開始生產七. 常見錯誤1):HC0025 CASSTTE SET ERROR.料架浮起错误2):HC0046 LARGE PART PICK UP ERROR大零件吸着错误3): HC0054 PART DISCARD BOX SETTING ERROR拋料盒没有放好.4): MC0004 AIR DOWN气压低5): MC0006/7 SAFETY STOP (FRONT or REAR)保护错误6):HC0056 HANDLE INTERLOCK手轮互锁八.關機1. 模式切換到MANU2. 按ORG 使各軸回原點3. 按OPERATION OFF 按鈕4. 出現TURN ON OPERATION READY畫面,按下MAIN CPU按鈕5. TURN OFF POWER。
图1 SVI II AP遵守本国或当地的有关电器安装的规范遵守本国或当地有关防爆区域操作的规范在对该装置进行操作前,要确定该装置未供电或确认其能够在危险区域内将定位器的盖图4 单作用式定位器气体接口图5双作用式定位器气体接口连接气源在安装完定位器的气管后,按以下步骤连接气源:1:连接气源到过滤减压器上。
2:打开气源。
3:调整过滤减压器。
4:供气压力必须大于阀门驱动器弹簧的最大压力上限5-10psi。
但不能大于阀门驱动器的额定压力。
参看定位器和驱动器的使用手册。
SVI II AP 的接线为了读SVI II AP 定位器的内部参数,必须连接一个HART调制解调器到定位器。
下面图7 在本质安全区域的安装SVI II AP 的维护SVI II AP是基以模块化理念设计的。
它上面的组件能够很容易、快速的进行更换。
对于SVI II AP的维护我们推荐以下操作步骤进行:1:拆卸和安装端盖。
2:拆卸和安装I/P转换器。
3:拆卸和安装气动继电器。
4:升级显示屏。
图8 气动转换器的盖子和显示屏的盖子安装SVI II AP 显示屏的盖子注意:在更换完毕盖子后一定将定位器的电源打开更换的显示屏端盖连接了一根系索来防止导线被拉伸损坏,安装时要将系索安装到定位对于使用pilot阀芯组件的阀门进行校准需要用到Manual Stop校准操作(参看SVI II AP每个本质安全电路必须包含一个接地保护或在独立接地金属导线上运行。
本质安全系统安装注意事项1)危险区域参考设备名牌上有关安装环境的技术要求。
2)现场接线本质安全系统使用的导线必须是接地的屏蔽线,或者使用金属导线做保护。
在危险区域内使用的导线必须能够承受交流500V R.M.S对地电压的一分钟测试。
安装时一定要遵守安装使用手册中内容进行。
安装中包括的栅栏接地要遵循使用国家有关的安装要求。
美国工厂共同标准:ANSI/ISA RP12.6(对于危险区域本质安全安装),国家电气法规ANSI/NFPA 70。
81853551EX 标记2适用文件3认证的产品4安全4.1安全注意事项–本设备在规定的运行条件下可应用于爆炸性气体环境 2 区。
–本设备只允许使用至少符合 ISO8573-1:2010 [7:4:4] 质量等级的压缩空气运行。
工作介质注意事项:不允许用润滑介质工作。
–本产品不能用于其它介质。
–在爆危区域外吸入工作介质。
–在有爆炸危险的区域以外,或者在适用于可控区域的防爆等级下连接裸露的电缆终端。
–只能在潜在爆炸性区域以外执行所有作业。
–关于产品的一切工作仅允许由具备资质的专业人员进行,这些专业人员对工作进行评估并识别出危险。
–请在原装状态下使用本装置,切勿擅自进行任何改动。
–仅使用经批准用于该防爆等级的电气控制装置 è /catalogue。
–仅使用适合该防爆等级的附件 è /catalogue。
4.2按规定使用阀岛用于控制气动执行元件。
4.3标记 X:特殊条件–将设备安装在防护等级至少为 IP54 的壳体中(根据 EN 60079-0)。
–不能在有电压时断开或打开。
–通过卡夹 NEAU-M12-GD 或带有特殊锁的额外外壳来避免插头脱开。
–采取适当的安装措施防止壳体带静电–在所有插头前使用额外的电缆应力消除装置。
–防止设备受到任何冲击载荷影响。
–防止设备受到紫外线辐射。
–环境温度:–5 °C £ Ta £ +50 °C–用端盖封闭未使用的输入和输出。
–过压被限制为最大额定电压的 140%。
–该设备只能在污染等级不超过 2(依据 IEC 60664-1 定义)的环境中使用。
5功能阀岛是用于控制气动驱动系统的可配置功能单元。
6调试–用堵头封闭未使用的开口。
–用保护盖封闭未使用的电接口。
7运行8维护–设备无需维护。
–在个别情况下可以更换易损件及备件。
此类维修只能由经过培训并授权的专业人员执行。
9技术参数。
深圳市雷赛智能控制股份有限公司地址:深圳市南山区学苑大道1001号南山智园A3栋10-11楼邮编:518000电话:400-885-5521传真:*************Email:********************网址:上海分公司地址:上海市淞江区九亭镇涞寅路1881号10栋电话:************传真:************北京办事处地址:北京市朝阳区北苑路13号院office1号楼A单元606号电话:************传真:************M542C(V2.0)数字式两相步进驱动器使用说明书版权所有不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】深圳市雷赛智能控制股份有限公司目录一、产品简介 (2)1.概述 (2)2.特点 (2)3.应用领域 (2)二、电气、机械和环境指标 (2)1.电气指标 (2)2.使用环境及参数 (3)3.机械安装图 (3)4.加强散热方式 (4)三、驱动器接口和接线介绍 (4)1.接口描述 (4)2.控制信号接口电路 (5)3.控制信号时序图 (5)4.控制信号模式设置 (6)5.接线要求 (6)四、电流、细分拨码开关设定和参数自整定 (7)1.电流设定 (7)2.细分设定 (7)3.参数自整定功能 (8)五、供电电源选择 (8)六、电机选配 (8)1.电机选配 (9)2.电机接线 (9)3.输入电压和输出电流的选用 (10)七、典型接线案例 (10)八、保护功能 (11)九、常见问题 (12)1.应用中常见问题和处理方法 (12)2.用户常见问题解答 (13)雷赛产品保修条款 (14)M542C(V2.0)数字式两相步进驱动器一、产品简介1.概述M542C(V2.0)是雷赛公司新推出的数字式两相步进电机驱动器,采用最新32位DSP技术,用户可以设置常用的8档细分以及8档电流,能够满足大多数场合的应用需要。
由于采用内置微细分技术,即使在低细分的条件下,也能够达到高细分的效果,低中高速运行都很平稳,噪音超小。

MOTEC智能驱动器PVT控制模式操作手册Version 2.1MOTEC(中国)营业体系2017-06-01版本说明:2017年11月06日发行,Version 2.1;版权信息:本手册为MOTEC(中国)营业体系(以下简称“MOTEC(中国)”)版权所有。
MOTEC(中国)对本手册拥有版权,未经书面授权,不可将本文的全部或部分内容进行复制、翻印、收录、再加工或任何形式的转让。
本文的编著几经审校。
但MOTEC(中国)不对其内容和推论中可能存在的错误担责。
因用户原因使用不当而对产品或用户造成的直接或间接损失,MOTEC(中国)同样免责。
使用本产品时务必遵照使用说明,以免造成设备或人身伤害。
本文中的内容的表述力图精确、可靠,但错误和疏忽之处再所难免,MOTEC(中国)保留随时修改和完善本文档的权利。
最新版本的使用说明书可在 下载。
联系方式:MOTEC(中国)营业体系北京诺信泰伺服科技有限公司地址:北京市通州区环科中路17号11B (联东U谷西区)电话:************-666传真:************邮编:100027网址:eMail:*********************目录1.PVT基础 (4)2.PVT通讯指令和寄存器 (5)2.1PVT通讯指令 (5)2.1.1 写数据到PVT队列 (5)2.1.2 获取参数表参数 (6)2.1.3 设置参数表参数 (6)2.1.4 写PVT数据到驱动器Flash (7)2.2 PVT相关寄存器 (8)3.PVT模式使用说明 (9)3.1PVT数据存储格式 (10)3.1.1位置和速度存储格式 (10)3.1.2PVT队列 (11)3.1.3 PVT数据内置Flash (12)3.2PVT通讯队列模式 (13)3.3 PVT内部模拟模式 (14)4.使用PVT模式注意事项 (15)4.1异常情况发生及处理 (15)4.2PVT模式下其他控制功能的使用 (15)4.3PVT周期时间的选择 (15)4.4速度设定值对PVT结果的影响 (15)4.5绝对运动和相对运动 (15)4.6PVT/PT说明 (15)5.CANopen模式下使用PVT功能 (16)5.1PVT功能相关对象字典 (16)5.2PVT功能相关对象字典 (16)5.2.1 对象0x609C:PVTQUEUE_HEAD (PVT队列头) (16)5.2.2 对象0x609D:PVTQUEUE_TAIL (PVT队列尾) (17)5.2.3 对象0x609E:PVTQUEUE_STATUS (PVT队列状态) (17)5.2.4对象0x609F:PVTQUEUE_ALARM_SIZE (PVT队列数据报警阈值) (17)5.2.5 对象0x60A0:PVTQUEUE_CLEAR (清空PVT队列) (18)5.2.6 对象0x60A1:PVT_TIME (PVT周期) (18)5.2.7对象0x60A2:PVT_RUNMODE (PVT运行模式) (19)5.2.8对象0x60A3:PVT_ RUNSTOP (PVT启动停止) (19)5.2.9对象0x60A4: CANOPEN_PROFILE_PVTSIMAPLLITUDE (PVT内部模拟模式幅值) (19)5.2.10 对象0x60A5:PVT_SIM_PERIOD(PVT内部模拟模式周期) (20)5.2.11 对象0x60A6: PVT_RUNTIMES(PVT内部Flash模式运行次数) (20)5.2.12 对象0x60A7: PVT_FILTER(PVT滤波器) (21)5.2.13 对象0x60A8:CANOPEN_PVT_POSITION(PVT位置值) (21)5.2.14 对象0x60A9:CANOPEN_PVT_VELOCITY(PVT速度值) (21)5.3CANopen通讯下PVT功能的实现 (22)5.3.1配置步骤 (22)6.联系方式 (22)1.PVT基础PVT(Position,Velocity,Time)控制模式即利用一个固定时间间隔的位置和速度序列重建较复杂曲线的运动轨迹的轨迹规划过程。
SINAMICS/SIMOTICS SINAMICS V90,SIMOTICS S-1FL6 操作说明Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG 文件订购号: 6SL3298-0AV60-0FP0Ⓟ 09/2013 本公司保留技术更改的权利Copyright © Siemens AG 2013.保留所有权利法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
商标所有带有标记符号 ® 的都是西门子股份有限公司的注册商标。
本印刷品中的其他符号可能是一些其他商标。
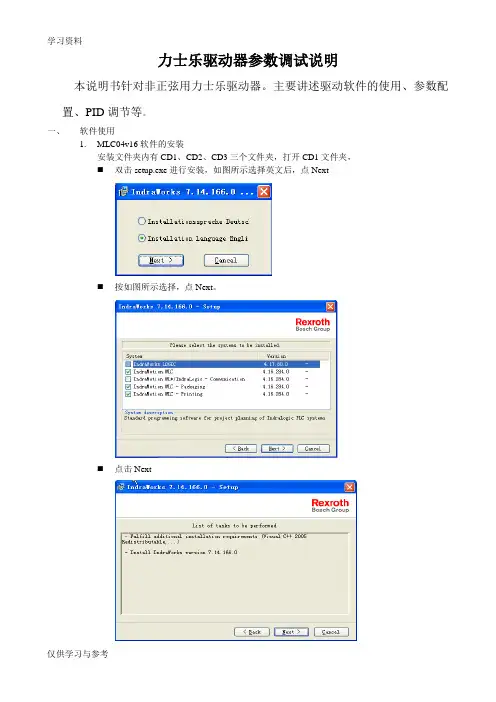
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
深圳市威科达科技有限公司VC511系列伺服驱动器使用说明书VC511轮切专型伺服功能说明书目录第1章轮切控制模式所有参数 (1)第2章轮切控制模式输入功能位 (10)第3章轮切控制模式输出功能位 (12)第4章故障代码及解决方法 (13)第5章标准凸轮和特殊凸轮功能说明 (14)5.1订单功能 (14)5.2立即裁切功能 (17)5.3取样长度 (17)5.4仿真功能 (18)5.5特殊凸轮停刀位选择 (18)5.6标准凸轮叠加齿轮功能 (19)5.7飞剪补偿系数 (19)5.8凸轮角度输出 (19)5.9凸轮啮合功能 (20)5.10凸轮脱离功能 (21)5.11凸轮暂停功能 (21)5.12中断事件 (22)5.13干扰滤波 (23)5.14禁止反转保护 (23)5.15计数器功能 (23)5.16原点回零功能 (24)5.17轮切点动功能 (25)5.18凸轮重要参数监视 (26)5.19切点相关功能 (28)5.20色标相关功能 (30)5.21主轴位置补偿方式 (32)5.22丢标处理方式 (34)5.23主从轴位置方向改变 (35)5.24标准凸轮弦弧补正功能 (35)5.25主轴移相功能 (35)5.26多刀刀轴脉冲数 (36)第6章标准凸轮和特殊凸轮试运行设置步骤 (37)6.1切长模式 (37)6.1.1接线 (37)6.1.3设置机械参数 (39)6.1.4凸轮曲线重启选择 (39)6.1.5设置切点有效区 (40)6.1.6切长来源选择 (40)6.1.7选择初次(重新啮合处理) (40)6.1.9配置功能输入位 (41)6.1.10原点回零 (41)6.1.11凸轮使能 (41)6.1.12切长模式试运行波形分析 (42)6.2色标跟踪模式 (43)6.2.1接线 (43)6.2.1选择主从轴位置来源 (44)6.2.2设置机械参数 (45)6.2.3凸轮曲线重启选择 (45)6.2.4设置切点有效区 (46)6.2.5切长来源选择 (46)6.2.6选择初次(重新啮合处理) (46)6.2.7选择跟标模式 (47)6.2.8设置色标相关参数 (47)6.2.9设置主轴位置补偿方式 (48)6.2.10设置丢标后处理方式 (49)6.2.11原点回零 (49)6.2.13凸轮使能 (49)6.2.14色标跟踪试运行波形分析 (49)6.4触发模式试运行简单步骤配置 (51)6.4.1接线 (51)6.4.2选择主从轴位置来源 (52)6.4.3设置机械参数 (53)6.4.4凸轮曲线重启选择 (53)6.4.5设置切点有效区 (54)6.4.6切长来源选择 (54)6.4.7选择初次(重新啮合处理) (54)6.4.8选择切长模式 (55)6.4.9配置功能输入位 (55)6.4.10原点回零 (55)6.4.11凸轮使能 (55)6.4.12触发模式试运行波形分析 (56)第7章通用凸轮功能说明 (57)7.1凸轮啮合 (57)7.2位输出段号 (57)7.3凸轮脱离 (57)7.4通用凸轮试运行设置步骤 (58)7.4.1接线 (58)7.4.2选择主从轴位置来源 (59)7.4.3设置机械参数 (60)7.4.4凸轮参数设置 (60)7.4.5通用凸轮曲线导入 (61)7.4.6运行 (63)第8章点位凸轮功能说明 (65)8.1点位凸轮运行方式 (65)8.2点位凸轮曲线参数 (65)8.3色标屏蔽 (65)8.4减速段相关处理 (66)8.5叠加位置 (66)8.6脱离方式 (67)第9章点位凸轮试运行设置步骤 (68)9.1接线 (68)9.2选择主从轴位置来源 (69)9.3设置机械参数 (70)9.4设置凸轮参数 (70)9.5设置凸轮运行相关参数 (71)9.6配置功能输入位 (72)9.7凸轮使能 (72)9.8试运行波形分析 (72)第10章配线 (74)10.1主电路接线 (74)10.2输入输出线 (75)10.3位置指令脉冲信号接线 (77)10.4通信接线 (80)10.5轮切经典接线图 (83)第11章Modbus通信协议 (84)第12章增益调整 (87)第13章裁切异常处理 (88)版本更新记录 (89)第1章轮切控制模式所有参数P15.17等待位置角度,单位:0.1°0.0-360.0180.0RW立即有效P15.18从轴每周裁刀个数1-161RW复位有效P15.19凸轮曲线重启方式0-无切点信号,切长重启凸轮曲线;1-切点信号只用于回零,之后使用切长;2-切点信号重新开启凸轮曲线0-22RW复位有效P15.20订单来源选择0-不切换,使用订单1;1-DI选择订单;2-循环切换;0-20RW立即有效P15.21订单完成后伺服状态0-清除所有订单次数,重新循环切换订单;1-从轴停在等待位置0-10RW立即有效P15.22订单1切长,单位:0.01mm0.01-21474836.471000.00RW 立即有效P15.24订单1剪切次数0-65535100RW立即有效P15.25订单2切长,单位:0.01mm0.01-21474836.471000.00RW 立即有效P15.27订单2剪切次数0-65535100RW立即有效P15.28订单3切长,单位:0.01mm0.01-21474836.471000.00RW 立即有效P15.30订单3剪切次数0-65535100RW立即有效P15.31订单4切长,单位:0.01mm0.01-21474836.471000.00RW 立即有效P15.33订单4剪切次数0-65535100RW立即有效P15.34订单接近阈值0-655351RW立即有效P15.35立即剪切长度(取样长度),单位:0.01mm0.01-21474836.47300.00RW 立即有效P15.37修改切长步进长度,单位:0.01mm0.00-655.35 5.00RW立即有效P15.38最小切长,从轴周长百分比%0-6553.580RW立即有效P15.39电子凸轮功能位,BIT0修改XY脉冲方向BIT1修改第二编码器脉冲方向BIT2修改轮切轴运动方向0-655350RW复位有效P15.40仿真选择0-动态仿真,从轴运动;1-静态仿真,从轴静止0-10RW复位有效P15.41仿真速度,单位:0.1m/min0.1-1000.060.0RW立即有效P15.42仿真加减速时间,单位:0.1sP15.42是从轴从零速加速至1000.0m/min的时间0.0-100.0 6.0RW立即有效P15.43重新或初次啮合处理0-记忆位置;1-剪切长度;2-色标到切点的距离;3-啮合主轴前置量P15.45,自动寻找切点;0-33RW立即有效P15.44凸轮啮合或者脱离加减速时间,单位:0.1s0-6553.5500.0RW 立即有效P15.45啮合前置量,单位:0.01mm啮合时,主轴运行P15.45距离后,从轴与主轴同线速度,遇到切点,开始走正常凸轮。