磁力驱动泵与电机的找正办法
- 格式:docx
- 大小:19.16 KB
- 文档页数:1
如何进行泵和电机联轴器的找中心一:联轴器概论1.什么是联轴器:联轴器属于机械通用零部件范畴,用来联接不同机构中的两根轴(主动轴和从动轴)使之共同旋转以传递扭矩的机械零件。
在高速重载的动力传动中,有些联轴器还有缓冲、减振和提高轴系动态性能的作用。
联轴器由两半部分组成,分别与主动轴和从动轴联接。
一般动力机大都借助于联轴器与工作机相联接,是机械产品轴系传动最常用的联接部件。
2.联轴器工作原理及用途(1)联轴器功能联轴器通常用来连接两轴并在其间传递运动和转矩,有时也可作为一种安全装置用来防止被连接机件承受过大的载荷,起到过载保护的作用。
用联轴器连接轴时只有机器停车并将联接拆开后,两轴才能分离。
(2)联轴器的类型联轴器所联接的两轴,由于制造及安装误差,承载后的变形以及温度变化的影响等,会引起两轴相对位置的变化,往往不能保证严格的对中。
根据联轴器有无弹性元件、对各种相对位移有无补偿能力,即能否在发生相对位移条件下保持联接功能以及联轴器的用途等,联轴器可分为刚性联轴器,挠性联轴器。
刚性联轴器:只能传递运动和转矩,不能补偿两轴的偏移,用于两种能严格对中并在工作中不发生相对位移的场合。
包括凸缘联轴器、套筒联轴器等。
挠性联轴器:包括无弹性元件的挠性联轴器和弹性联轴器。
这种联轴器不仅能传递运动和转矩,而且能利用联轴器中弹性元件的变形来补偿位移量,具有不同程度的轴向、径向、角向补偿性能,同时还具有不同程度的减振、缓冲作用。
无弹性元件的挠性联轴器包括齿式联轴器、万向联轴器、十字滑块联轴器等。
弹性联轴器包括弹性套柱销联轴器、弹性柱销联轴器等。
二、联轴器找正方法1. 联轴器找正的目的联轴器的找正是电动机安装的重要工作之一,找正的目的是在电动机工作时使主动轴和从动轴两轴中心线在同一直线上。
找正的精度关系到机器是否能正常运转,对高速运转的机器尤其重要。
两轴绝对准确的对中是难以达到的,对连续运转的机器要求始终保持准确的对中就更困难.各零部件的不均匀热膨胀,轴的挠曲,轴承的不均匀磨损,机器产生的位移及基础的不均匀下沉等,都是造成不易保持轴对中的原因.因此,在设计机器时规定两轴中心有一个允许偏差值,这也是安装联轴器时所需要的.从装配角度讲,只要能保证联轴器安全可靠地传递扭矩,两轴中心允许的偏差值愈大,安装时愈容易达到要求。


机泵找正个人分享一、目的为了让泵的中心线跟电机中心线在一条直线上,保证泵跟电机的同轴度,降低离心泵运行过程中振值。
二、找正所需工器具梅花扳手、活口扳手、剪刀、千分尺、撬杠、铜皮、百分表两副。
三、找正步骤1、粗找先用百分表调整好泵与电机左右径向数据,一般打表数据在15(0.15mm)道内。
2、精找1)先用扳手拧紧地脚螺栓,分别在泵的轴向跟径向架两块表(泵找电机,径向表在上,轴向表在下,反之亦然),记初始值为0,泵旋转180°读出下一组数据,记录数据。
(可以重复旋转2-3次,与前一组数据对比,看看第一次数据对不对,以准确数据为准)2)数据计算(1)轴向找平公式推倒(以上张口为例)三角形Oab~三角形ODE~三角形OAB(相似)所以,ab/DE=Ob/OE,即DE=(ab*OE)/Obab/AB=Ob/OB,即AB=(ab*OB)/ObDE为前地脚螺栓所加垫片,AB为前后脚螺栓所加垫片,Ob为靠背轮直径,OE为靠背轮到前地脚螺栓距离,OB为靠背轮到后地脚螺栓距离(用卷尺量)。
(2)上下轴向、径向找平常见的4种情况1)上张口,中心偏高2)上张口,中心偏低3)下张口,中心偏高4)下张口,中心偏低(3)上下轴向、径向找平数据计算(以上张口,中心偏低为例)则前地脚螺栓所加垫片厚度DE为:(0-(-0.18))*OE/Ob+(0.3-0)/2后地脚螺栓所加垫片厚度AB为:(0-(-0.18))*OB/Ob+(0.3-0)/2若计算结果为正,则加垫片,为负,则减垫片。
假设靠背轮直径Ob=195mm,靠背轮到前地脚轮上距离OE的距离为500mm,靠背轮到后地脚轮上距离OB的距离为1200mm则DE=(0-(-0.18))*500/195+(0.3-0)/2=0.46+0.15=0.61mm AB=(0-(-0.18))*1200/195+(0.3-0)/2=1.11+0.15=1.26mm所以前地脚螺栓加0.61mm,后地脚螺栓1.26mm。
应用坐标法进行机泵找正李长斌(大庆石化公司久隆房地产开发股份有限公司,黑龙江 大庆163714)坐标法是采用单表测量径向读数,在坐标纸上作图来确定调整机座支脚下加减垫片厚度 的方法。
它具有误差小、效率高、容易掌握的特点。
文中应用坐标法对联轴器的偏移进行了 找正。
1 联轴器的偏移在机泵安装时,对轮经常出现4种情况[1]。
(1)两轴不同心,两轴偏角;(2)两轴同心,两轴不平行;(3)两轴不同心,两轴不平 行;(4)两轴同心,两轴平行。
在(1)、( 2)、( 3)种情况下,设备不能正常运行。
第(4)种情况,两轴即同心又平行, 主动轴(电机轴)与从动轴(泵轴)的中心线为同轴线。
这是对轮找正的最佳工况位置。
2 测量方法机泵对轮找正是在泵找好水平度以后进行的[2]。
故以泵的对轮为基准,测定与调整电机 的对轮来保证电机与泵两轴对中找正。
表在基准(泵)侧对轮上的读数为 a i ;表在调整(电机)侧对轮上的读数为 a i /。
(1) 测量前,首先将机泵水平找好,同时把紧机泵各部地脚螺栓[3]。
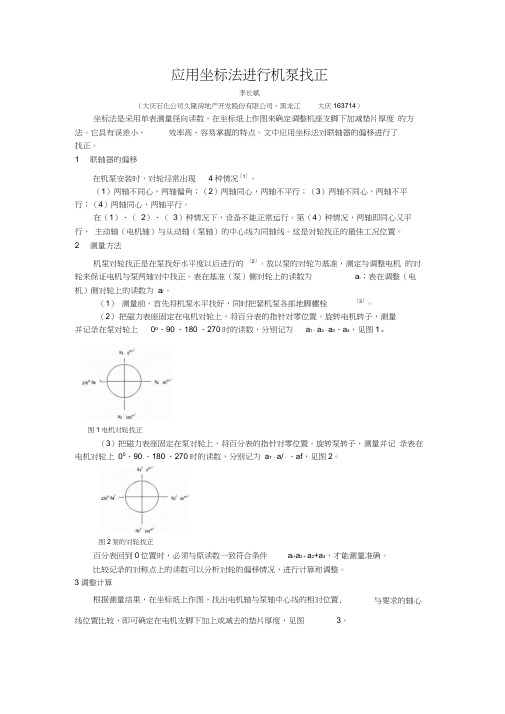
(2) 把磁力表座固定在电机对轮上,将百分表的指针对零位置。
旋转电机转子,测量 并记录在泵对轮上 0o 、90°、180°、270°时的读数,分别记为 a 1、a 2、a 3、a 4,见图1。
图1电机对轮找正(3)把磁力表座固定在泵对轮上,将百分表的指针对零位置。
旋转泵转子,测量并记 录表在电机对轮上 00、90°、180°、270°时的读数,分别记为 a 1/、a/、、af ,见图2。
图2泵的对轮找正百分表回到0位置时,必须与原读数一致符合条件a i+a 3 = a 2+a 4,才能测量准确。
比较记录的对称点上的读数可以分析对轮的偏移情况,进行计算和调整。
3调整计算 根据测量结果,在坐标纸上作图,找出电机轴与泵轴中心线的相对位置,线位置比较,即可确定在电机支脚下加上或减去的垫片厚度,见图与要求的轴心3。

轴找正、对中解决方法与技巧1、泵对中的重要性泵和电机的联轴器所连接的两根轴的旋转中心应严格的同心,联轴器在安装时必须精确地找正、对中,否则将会在联轴器上引起很大的应力,并将严重地影响轴、轴承和轴上其他零件的正常工作,甚至引起整台机器和基础的振动或损坏等。
因此,泵和电机联轴器的找正是安装和检修过程中很重要的工作环节之一。
2、联轴器找正是偏移情况的分析在安装新泵时,对于联轴器端面与轴线之间的垂直度可以不作检查,但安装旧泵时,一定要仔细地检查,发现不垂直时要调整垂直后再进行找正。
一般情况下,可能遇到的有以下四种情形。
1)S1=S2,a1=a2两半靠背轮端面是处于既平行又同心的正确位置,这时两轴线必须位于一条直线上。
2)S1=S2,a1≠a2两半靠背轮端面平行但轴线不同心,这时两轴线之间有平行的径向位移e=(a2-a1)/2。
3)S1≠S2,a1=a2两半靠背轮端面虽然同心但不平行,两轴线之间有角向位移α。
4)S1≠S2,a1≠a2两半靠背轮端面既不同心又不平行,两轴线之间既有径向位移e又有角向位移α。
联轴器处于第一种情况是我们在找正中致力达到的状态,而第二、三、四种状态都不正确,需要我们进行调整,使其达到第一种情况。
在安装设备时,首先把从动机(泵)安装好,使其轴线处于水平位置,然后再安装主动机(电机),所以找正时只需要调整主动机,即在主动机(电机)的支脚下面加调整垫面的方法来调节。
3、找正时测量调节方法下面主要介绍在检修过程中常用的两种测量调整方法,根据测量工具不同可分为:1)利用刀形尺和塞尺测量联轴器的不同心和利用楔形间隙轨或塞尺测量联轴器端面的不平行度,这种方法适用于弹性联接的低转速、精度要求不高的设备。
2)利用百分表及表架或专用找正工具测量两联轴器的不同心及不平行情况,这种方法适用于转速较高、刚性联接和精度要求高的转动设备。
注意:1)在用塞尺和刀形尺找正时,联轴器径向端面的表面上都应该平整、光滑、无锈、无毛刺。

泵找正方法联轴器的找正是机器安装的重要工作之一.找正的目的是在机器在工作时使主动轴和从动轴两轴中心线在同一直线上.找正的精度关系到机器是否能正常运转,对高速运转的机器尤其重要.两轴绝对准确的对中是难以达到的,对连续运转的机器要求始终保持准确的对中就更困难.各零部件的不均匀热膨胀,轴的挠曲,轴承的不均匀磨损,机器产生的位移及基础的不均匀下沉等,都是造成不易保持轴对中的原因.因此,在设计机器时规定两轴中心有一个允许偏差值,这也是安装联轴器时所需要的.从装配角度讲,只要能保证联轴器安全可靠地传递扭矩,两轴中心允许的偏差值愈大,安装时愈容易达到要求。
但是从安装质量角度讲,两轴中心线偏差愈小,对中愈精确,机器的运转情况愈好,使用寿命愈长。
所以,不能把联轴器安装时两轴对中的允许偏差看成是安装者草率施工所留的余量.联轴器找正时两轴偏移情况的分析机器安装时,联轴器在轴向和径向会出现偏差或倾斜,可能出现四种情况,如图1所示。
根据图1所示对主动轴和从动轴相对位置的分析见表1。
图1联轴器找正时可能遇到的四种情况表1联轴器偏移的分析单表法它是近年来国外应用日益广泛的一种联轴器找正方法。
这种方法只测定联轴器轮毂外圆的径向读数,不测量端面的轴向读数,测量操作时仅用一个百分表,故称单表法。
其安装,测量示意图如图8此种方法用一块百分表就能判断两轴的相对位置并可计算出轴向和径向的偏差值。
也可以根据百分表上的读数用图解法求得调整量。
用此方法测量时,需要特制一个找正用表架,其尺寸,结构由两半联轴器间的轴向距离及轮毂尺寸大小而定。
表架自身质量要小,并有足够的刚度。
表架及百分表均要求固紧,不允许有松动现象。
图8便是两轴端距离较大时找正用表架的结构示意图。
单表测量的操作方法是,在两个半联轴器的轮毂外圆面上各作相隔90°的四等分标志点1a,2a,3a,4a与1b,2b,3b,4b。
先在“B”联轴器上架设百分表,使百分表的触头接触在“A”联轴器的外圆面上的1a点处,然后将表盘对到“0”位,按轴运转方向盘动“B”联轴器,分别测得“A”联轴器上的1a,2a,3a,4a的读数(其中1a=0),为准确可靠可复测几次。
电机找正方法总结一般在安装机器时,首先把从动机安装好,使其轴处于水平,然后安装主动机,所以找正时只需调整主动机,即垂直方向偏差上,主动机的支脚下面用加减垫片的方法来进行调整,水平方向上的偏差用同样的方法计算,使用顶丝或千斤顶进行调整。
测量时百分表安装于从动轴上的专用支架上,表头在接触到电机轴靠背轮的外圆及端面。
具体步骤为:先测量偏差,找准电机靠背轮相对于从动机靠背轮的空间位置和偏差值,然后通过相似三角形计算电机的调整量。
一、测量偏差(1)、双表测量法(一点测量法)用两块百分表分别测量电机靠背轮外圆和端面同一方向上的偏差值,即在测量某方位上径向读数的同时测量该方位上轴向读数。
测量时,先测0°方位的径向读数A1 及轴向读数S1。
为分析计算方便,常把A1 和S1 的值调整为零,然后两半轴同时转动(可消除靠背轮不圆造成的误差),每转90°记录一次读数,将数据记录至表中。
当百分表转回到零位时,外圆记录径向读数A1、A2、A3、A4,端面记录读数S1、S2、S3、S4 必须与原零位读数一致,否则找出原因排除。
常见的原因是轴窜动或地脚螺栓松动,测量的读书符合下列条件才属正确,即:A1+A3=A2+A4;S1+S3=S2+S4端面不平行值(张口)的计算,不考虑轴向窜轴,计算公式为S=S1-S3,正值为下张口,负值为上张口。
左右张口为S=S2-S4,正值为S4 那边张口,负值为S2 那边张口。
上下径向偏差的计算公式为A=(A1-A3)/2,正值为电机靠背轮偏高,负值为电机靠背轮偏低。
左右径向偏差的计算公式为A =(A2 -A4)/2,正值为靠背轮偏右,负值为靠背轮偏左。
因为在轴向使用一只表不能消除轴向窜动的误差,故此方法适用于轴向窜动较小的中小型机器。
(2)、三表测量法(两点测量法)在轴中心等距处对称布置两块百分表,在测量一个方位上径向读数和轴向读数的同时,在相对的一个方位上测量轴向读数,即同时测量相对两方位上的轴向读数,可以消除在盘车时轴的窜动对轴向读数的影响。
一、泵对中的重要性泵和电机的联轴器所连接的两根轴的旋转中心应严格的同心,联轴器在安装时必须精确地找正、对中,否则将会在联轴器上引起很大的应力,并将严重地影响轴、轴承和轴上其他零件的正常工作,甚至引起整台机器和基础的振动或损坏等。
因此,泵和电机联轴器的找正是安装和检修过程中很重要的工作环节之一。
二、联轴器找正是偏移情况的分析在安装新泵时,对于联轴器端面与轴线之间的垂直度可以不作检查,但安装旧泵时,一定要仔细地检查,发现不垂直时要调整垂直后再进行找正。
一般情况下,可能遇到的有以下四种情形。
1)、S1=S2,a1=a2 两半靠背轮端面是处于既平行又同心的正确位置,这时两轴线必须位于一条直线上。
2)、S1=S2,a1≠a2 两半靠背轮端面平行但轴线不同心,这时两轴线之间有平行的径向位移e=(a2-a1)/2。
3)、S1≠S2,a1=a2 两半靠背轮端面虽然同心但不平行,两轴线之间有角向位移α。
4)、S1≠S2,a1≠a2 两半靠背轮端面既不同心又不平行,两轴线之间既有径向位移e又有角向位移α。
联轴器处于第一种情况是我们在找正中需要努力达到的理想状态,而其他三种状态都不正确,需要我们进行调整,使其达到第一种情况。
在安装设备时,首先把从动机(即常说的泵头)安装好,使其轴线处于水平位置,然后再安装主动机(即常说的电机),所以找正时只需要调整电机,即在电机的支脚下面加调整垫片的方法来调节。
三、找正时测量调节方法下面主要介绍在检修过程中常用的两种测量调整方法,根据测量工具不同可分为:1)、利用刀形尺和塞尺测量联轴器的不同心和利用楔形间隙轨或塞尺测量联轴器端面的不平行度,这种方法适用于弹性联接的低转速、精度要求不高的设备。
2)、利用百分表及表架或专用找正工具(如激光对中校正仪)测量两联轴器的不同心及不平行情况,这种方法适用于转速较高、刚性联接和精度要求高的转动设备。
注意:1)、在用塞尺和刀形尺找正时,联轴器径向端面的表面上都应该平整、光滑、无锈、无毛刺。
电机找正计算方法在电机控制系统中,电机找正是非常重要的一步,它可以确保电机在正常工作时,能够按照预期的方式运动。
而电机找正的计算方法则是确定电机位置的关键步骤之一。
本文将介绍电机找正的计算方法,帮助读者更好地理解和应用这一重要的技术。
首先,我们需要明确电机找正的概念。
电机找正是指确定电机转子位置的过程,通常通过特定的传感器来实现。
在电机控制系统中,准确的电机找正可以确保电机在启动时能够以正确的位置开始运动,从而避免不必要的震动和噪音。
因此,电机找正的计算方法至关重要。
一种常见的电机找正计算方法是基于霍尔传感器的位置检测。
霍尔传感器是一种常用的位置传感器,能够检测磁场的变化,从而确定电机转子的位置。
通过将霍尔传感器安装在电机的固定部分上,并将磁铁安装在电机转子上,就可以实现位置的检测。
在实际应用中,可以通过采集霍尔传感器的信号,并利用特定的算法来计算电机转子的位置,从而实现电机找正的过程。
另一种常见的电机找正计算方法是基于编码器的位置检测。
编码器是一种高精度的位置传感器,能够提供更加精确的位置信息。
通过将编码器安装在电机的轴上,并利用编码器的脉冲信号来确定电机转子的位置,可以实现更加精确的电机找正。
在实际应用中,可以通过采集编码器的脉冲信号,并利用特定的计数方法来计算电机转子的位置,从而实现电机找正的过程。
除了以上介绍的两种常见方法外,还有一些其他的电机找正计算方法,如基于磁编码器、光电编码器等。
这些方法各有特点,适用于不同的电机控制系统。
在实际应用中,需要根据具体的情况选择合适的电机找正计算方法,并结合实际的控制需求来进行调整和优化。
总之,电机找正的计算方法是电机控制系统中的重要环节,它直接影响着电机的运动性能和控制精度。
通过选择合适的位置传感器和计算方法,并结合实际的控制需求,可以实现准确、稳定的电机找正,从而提高电机控制系统的性能和可靠性。
希望本文的介绍能够帮助读者更好地理解和应用电机找正的计算方法,为实际工程应用提供参考。
磁力驱动泵与电机的找正办法
磁力驱动泵与电机的找正直接影响到磁力驱动泵最终的使用效果及寿命,找正归
根于主要是测得两个联轴器轮毂面上的吻合情况,我以恒盛泵业通用联轴器给大
家介绍一下。
1、磁力驱动泵和电动机找正作业之前,应确认电动机的电源已切断,并挂有
“有人检修勿动”等字样的警示牌。
2、在底板周边添加楔块,用来找平机组,使用水平尺将底板安装螺栓的螺母
向下拉紧,复查地板是否水平。
3、通过拆下联轴节,测试检査驱动器的旋转方向或点动M机启动按钮检查电
动机的旋转方向。如果电动机转向正确。如果转向不正确,需要重新连接电机线
路。电动机转向正确后可继续进行找正工作。
4、泵吸入和排出管线的支撑或吊架不得关联到泵机组,并安装热膨胀节,以
保护泵不受膨胀负荷影响。应将管道锚固(定位元件)在膨胀节和泵之间,并尽
可能靠近泵体。如果不装配适当的管道支架和膨胀节,泵体就会产生应力。所以,
必须在泵和电动机正常操作温度下检查和更正其找正情况。
5、联轴器找正主要是对两轴之间的角偏差、位置偏移进行找正。角偏差:即
一根轴的轴线与另一根轴形成角度。位置偏移:即一根轴的中心与另一根轴发生
位置偏移现象。
6、磁力驱动泵在运行过程中达到操作温度条件下,检查磁力驱动泵和电动
机的找正情况。在泵正常运行约2个月后,应趁热再次对泵组和电动机的找正情
况进行检查。如果找正结果有变动,重新对其找正,并在2个月后进行复查。