起重机防摇技术研究
- 格式:docx
- 大小:15.40 KB
- 文档页数:3
汽车起重机抗摇摆控制系统研究的开题报告一、研究背景随着近年来汽车起重机在工业生产中的需求日益增加,汽车起重机的各项性能要求也越来越高。
其中,抗摇摆是汽车起重机在工作过程中必须具备的重要性能之一。
汽车起重机在吊装过程中会受到风力、地面不平度、悬挂物高度、动力变化等因素的影响,容易出现晃动现象,对操作带来极大的困难,甚至会导致意外事故的发生。
因此,汽车起重机抗摇摆控制系统的研究具有广泛的应用前景和重要的理论意义。
二、研究目的本研究旨在设计一种汽车起重机抗摇摆控制系统,能够实现对汽车起重机在吊装过程中的晃动进行有效控制,保证吊装过程的安全和稳定。
三、研究内容1.汽车起重机抗摇摆控制系统的原理研究:通过对汽车起重机的结构和吊装特点进行分析,探讨汽车起重机晃动控制的原理和方法。
2.汽车起重机抗摇摆控制系统的模型建立:建立汽车起重机抗摇摆控制系统的数学模型,并进行仿真验证。
3.汽车起重机抗摇摆控制系统的算法设计:设计一种基于现代控制理论的汽车起重机抗摇摆控制算法,通过有效的反馈控制方法实现汽车起重机在吊装过程中的抗摇摆控制。
4.汽车起重机抗摇摆控制系统的实验验证:通过实际的实验验证,检验所设计的汽车起重机抗摇摆控制系统的有效性和可靠性。
四、研究意义该研究结果将为汽车起重机在吊装过程中的晃动控制提供一种新的解决途径,从而提高汽车起重机的使用效率,减少搬运过程中发生的意外事故发生率,对推广智能化制造、提高我国工业水平也将产生积极的推动作用。
五、预期结果通过本研究,预计可以开发一种高效、可靠的汽车起重机抗摇摆控制系统,实现汽车起重机在吊装过程中的稳定运行和晃动控制,有效地提高汽车起重机在工业生产中的使用效率和安全性。
同时,通过本研究的成果,还可以推动智能化制造、提高我国工业水平等方面发展。
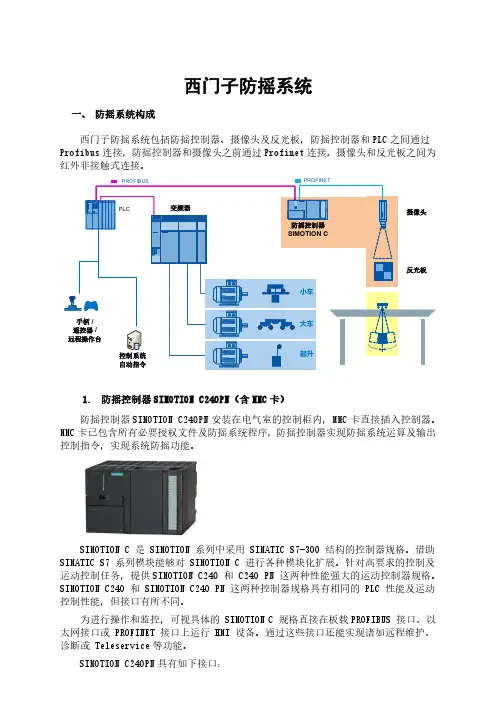
西门子防摇系统一、防摇系统构成西门子防摇系统包括防摇控制器、摄像头及反光板,防摇控制器和PLC之间通过Profibus连接,防摇控制器和摄像头之前通过Profinet连接,摄像头和反光板之间为红外非接触式连接。
控制系统自动指令1.防摇控制器SIMOTION C240PN(含MMC卡)防摇控制器SIMOTION C240PN安装在电气室的控制柜内,MMC卡直接插入控制器。
MMC卡已包含所有必要授权文件及防摇系统程序,防摇控制器实现防摇系统运算及输出控制指令,实现系统防摇功能。
SIMOTION C 是 SIMOTION 系列中采用 SIMATIC S7-300 结构的控制器规格。
借助 SIMATIC S7 系列模块能够对 SIMOTION C 进行各种模块化扩展。
针对高要求的控制及运动控制任务,提供SIMOTION C240 和 C240 PN 这两种性能强大的运动控制器规格。
SIMOTION C240 和 SIMOTION C240 PN 这两种控制器规格具有相同的 PLC 性能及运动控制性能,但接口有所不同。
为进行操作和监控,可视具体的 SIMOTION C 规格直接在板载PROFIBUS 接口、以太网接口或 PROFINET 接口上运行 HMI 设备。
通过这些接口还能实现诸如远程维护、诊断或 Teleservice等功能。
操作,显示和诊断• 1 x 运行方式选择开关• 1 x 用于故障和状态显示的 LED 灯板载 I/O• 18 路数字量输入(C240:其中 2 个用于本地测量输入,4 个用于全局测量输入/零标记,C240 PN:其中 4 个用于全局测量输入)• 8 路数字量输出通讯• 1 x 工业以太网的接口• 2 x PROFIBUS DP 的接口(其中一个接口针对 MPI)• 1 x PROFINET IO 的接口(3 个端口)(C240 PN)数据备份• 1 x 用于 SIMOTION 微型存储卡(MMC)的插槽其他接口• 电源端子SIMOTION C240PN技术参数如下:允许的环境温度: 水平安装0~55℃;垂直安装0~40℃;供电电压: 24V DC (允许范围20.4~28.8V)电流消耗 典型值: 0.9A(无输入输出);1.2A(带4个5V编码器);1.9A(带4个24V编码器)能耗: 15W启动电流: 8A尺寸(W*H*D): 200*125*118重量(g): 约1150防护等级: IP202.摆幅检测摄像头及反光板SIMOCRANE CenSOR摆幅检测系统包括一个安装在小车架上的摄像头和一个安装在吊钩位置的反光板。
天车防摇计算
摘要:
1.天车防摇计算的背景和意义
2.天车防摇计算的原理和方法
3.天车防摇计算的实际应用和效果
正文:
天车防摇计算是针对天车在运行过程中可能出现的摇晃现象进行的一种计算。
天车,又称起重机,是一种广泛应用于工业生产现场的重型机械设备。
在吊装作业中,天车摇晃会给施工安全带来极大的隐患,因此,研究天车防摇计算对于确保工程安全具有重要意义。
天车防摇计算的原理和方法主要基于力学原理和数学模型。
在分析天车摇晃的原因时,通常会将天车视为一个刚体,并考虑其在三维空间中的姿态和运动状态。
通过建立天车的动力学模型,可以分析在不同工况下天车的摇晃特性,从而为设计防摇措施提供理论依据。
在实际应用中,天车防摇计算需要综合考虑多种因素,如天车的结构参数、载荷特性、运行速度等。
为了提高计算的准确性和效率,现代计算技术如有限元分析、数值模拟等也被广泛应用于天车防摇计算。
通过这些计算方法,可以预测天车在各种工况下的摇晃程度,并据此采取相应的防摇措施。
天车防摇计算的实际应用和效果主要体现在以下几个方面:
1.提高工程安全:通过采取防摇措施,可以有效降低天车在运行过程中的摇晃程度,从而降低事故风险,确保工程安全。
2.提高工作效率:合理的防摇措施可以减少因天车摇晃导致的停机时间,提高施工效率。
3.降低维护成本:天车防摇计算有助于优化天车结构设计,提高天车的使用寿命,从而降低维护成本。
总之,天车防摇计算在保障工程安全、提高工作效率和降低维护成本等方面具有重要作用。
基于TM241 PLC和ATV340变频器的起重机防摇晃系统的应用实践Application practice of Crane anti sway system based on TM241 PLC and ATV340 inverter李勇忺,成都众业达电器有限责任公司yongxian Li,CHENGDU ZHONGYEDA ELECTRIC CO.,LTD摘要:本文描述采用施耐德御卓家族变频器ATV340对起重机进行防摇控制,从而减小行走启停时的摇晃。
系统采用施耐德PLC M241作为控制器,利用其集成防摇功能块,实现简单,效果良好。
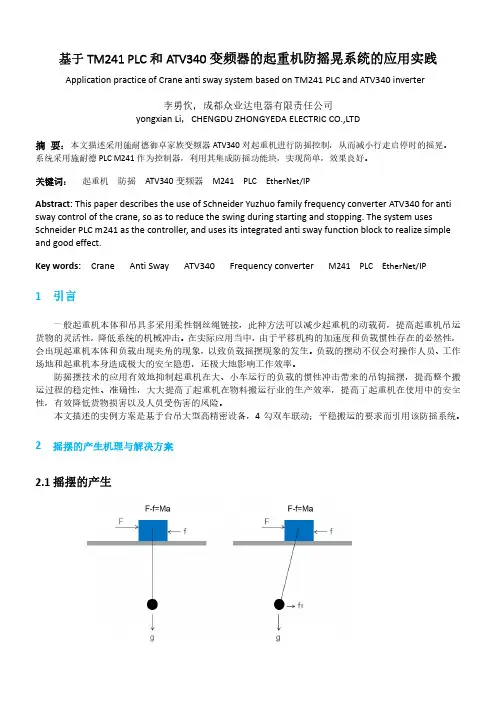
关键词:起重机防摇ATV340变频器M241 PLC EtherNet/IPAbstract: This paper describes the use of Schneider Yuzhuo family frequency converter ATV340 for anti sway control of the crane, so as to reduce the swing during starting and stopping. The system uses Schneider PLC m241 as the controller, and uses its integrated anti sway function block to realize simple and good effect.Key words:Crane Anti Sway ATV340 Frequency converter M241 PLC EtherNet/IP1 引言一般起重机本体和吊具多采用柔性钢丝绳链接,此种方法可以减少起重机的动载荷,提高起重机吊运货物的灵活性,降低系统的机械冲击。
在实际应用当中,由于平移机构的加速度和负载惯性存在的必然性,会出现起重机本体和负载出现夹角的现象,以致负载摇摆现象的发生。
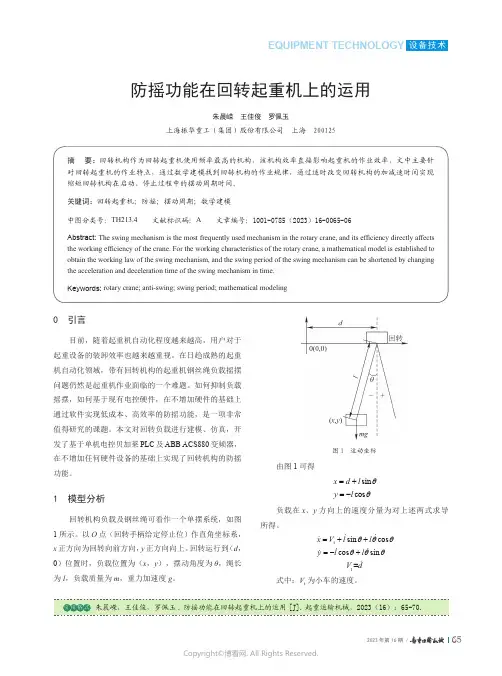
防摇功能在回转起重机上的运用朱晨嵘 王佳俊 罗佩玉上海振华重工(集团)股份有限公司 上海 200125摘 要:回转机构作为回转起重机使用频率最高的机构,该机构效率直接影响起重机的作业效率,文中主要针对回转起重机的作业特点,通过数学建模找到回转机构的作业规律,通过适时改变回转机构的加减速时间实现缩短回转机构在启动、停止过程中的摆动周期时间。
关键词:回转起重机;防摇;摆动周期;数学建模中图分类号:TH213.4 文献标识码:A 文章编号:1001-0785(2023)16-0065-06Abstract: The swing mechanism is the most frequently used mechanism in the rotary crane, and its efficiency directly affects the working efficiency of the crane. For the working characteristics of the rotary crane, a mathematical model is established to obtain the working law of the swing mechanism, and the swing period of the swing mechanism can be shortened by changing the acceleration and deceleration time of the swing mechanism in time.Keywords:rotary crane; anti-swing; swing period; mathematical modeling0 引言目前,随着起重机自动化程度越来越高,用户对于起重设备的装卸效率也越来越重视。
在日趋成熟的起重机自动化领域,带有回转机构的起重机钢丝绳负载摇摆问题仍然是起重机作业面临的一个难题。
科技视界Science &Technology VisionScience &Technology Vision 科技视界起重机在正常工作时,大、小车运行的起、制动所产生的加、减速导致挠性悬挂的载荷产生一定的摆动,这种摆动直接影响到起重机使用的生产效率,对于频繁作业的起重机而言,降低载荷的摆动时间,提高工作效率刻不容缓。
另外,载荷的摆动还会对工作人员、设备和起重机本身造成极大的安全隐患,因此,研究一套起重机的防摇摆系统,实现平稳作业、已成为起重机研究机构关注的热点问题之一。
一个好的防摇摆系统能起良好的减摇效果,可以提高生产效率,减小生产过程中的安全隐患。
起重机常用的防摇摆方式主要有手动式、机械式、电气式。
1手动式防摇摆利用司机熟练的操作,当载荷到达目的地时,司机采用打反车的方式,让小车反方向运行,这样能消弱摆动量,使载荷较快地停下来,但是这种方式对桥架、传动部分冲击大,也容易损坏电气元件,降低使用寿命。
操作人员频繁的操作,容易疲劳,安全隐患也比较大。
2机械式防摇摆2.1交叉钢丝绳防摇摆沿小车运行方向在小车架上装设两组交叉悬挂的减摇钢丝绳及驱动装置,来驱动液压泵,依据液压回路中安全阀的作用,使钢丝绳产生张力,从而控制载荷的摆动。
这种方式不影响起升钢丝绳的使用寿命,如果该装置出现问题,也不会影响整机的安全性,只是在起吊载荷与空载使用时,效果差异比较大。
2.2分离小车式防摇摆分离小车式防摇摆的工作原理是当小车行走时,前后两组小车通过驱动机构向两侧分离,使起升机构的钢丝绳呈“V”型,这样能够有效控制载荷的摆动。
当小车停止运行作起升或下降动作时,两组小车自行靠拢。
这种装置使小车自重增加,结构形式也比较复杂。
2.3跷板梁式防摇摆跷板梁式防摇摆装置是由跷板梁和安装在起重机上面的液力缓冲缸组成,当小车起动或是加速时,由于惯性的作用,载荷将向小车运行的反向摆动,从而使跷板梁也跟着倾斜,跷板梁的倾斜能量将由液力缓冲缸吸收,由于载荷向后方向的摆动受阻,于是载荷将向反方向摆动,此时,跷板梁也跟着向相反的方向倾斜,如此反复由液力缓冲缸吸收能量,从而有效控制载荷的摆动。
一种塔式起重机防摇运行控制方法与流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!塔式起重机防摇运行控制方法及其实施流程在建筑工地上,塔式起重机是不可或缺的重要设备,它承担着重物的搬运工作。
大连理工大学专业学位硕士学位论文摘要起重机被广泛地应用于核电风电安装、重大桥隧工程、港口码头、航空航天等领域。
起重机起升机构中的挠性构件与卷绕装置的耦合作用使吊钩的摇摆特性变得复杂多变,二者之间的接触缠绕使钢丝绳和滑轮系统成为复杂的刚柔耦合多体系统。
以桥式起重机为例,其工作时大车、小车需要频繁起动、制动,在惯性作用下,吊钩或吊重会产生一定程度的摇摆,影响吊装作业时的精确定位,严重降低了装卸效率,并对安全生产带来隐患。
因此研究其各个工况下的摇摆特性并掌握其规律十分必要。
本文通过虚拟样机技术建立了桥式起重机样机模型并分析其不同工况下吊重的摇摆特性。
本文首先针对桥式起重机起升机构中的吊重建立二维和三维空间的吊重摆动动力学数学模型。
利用MATLAB软件中的Simulink模块对起重机吊重的二维摆动进行了建模仿真分析,得到了在不同驱动力、摆长和吊重质量下的摆角-时间曲线。
其次,采用虚拟样机技术,在动力学软件RecurDyn中建立起重机动力学仿真模型。
以通用桥式起重机的三倍率起升机构钢丝绳缠绕系统为研究对象,采用有限元柔性体(F-Flex)方法对钢丝绳系统进行柔性体建模,并对其添加约束和驱动以进行各种工况下的仿真运动。
对仿真结果进行对比分析,得出吊重摇摆偏移最大的工况为急停工况,其次为完整作业工况;当大、小车加速度一定时,不同起重量对吊重摇摆没有影响;随着摆长的增加,吊重在空间各向的摇摆偏移也越大。
然后将本文的理论分析与模型仿真对比分析,进一步验证了样机模型的可靠性。
最后,设计了吊重摇摆测试实验方案,对实验平台进行了结构参数设置和电机、减速器以及变频器等的选型计算;对所需测量的吊重摆角、吊重起降速度和大车、小车的速度以及加速度变化等运动状态变量的传感器进行选取。
通过传感器进行实际数据测量采集,研究分析与样机模型产生差异原因并进行相应的修正。
关键词:桥式起重机;动力学建模;虚拟样机;吊重摇摆;实验方案设计桥式起重机吊重摇摆特性的建模与仿真研究Modeling and Simulation Research on Swing Characteristics of BridgeCrane HookAbstractCranes are widely used in nuclear power and wind power installation, major bridge and tunnel projects, port terminals, aerospace and other fields. The coupling action of the flexible member and the winding device in the hoisting mechanism of the crane makes the rocking characteristics of the hook become complex and changeable, and the contact winding between them makes the wire rope and pulley system become a complex rigid-flexible coupling multi-body system. Take the bridge crane as an example, when it works, the cart and trolley need to start and brake frequently, and under the action of inertia, the hook or lifting will sway to a certain extent. Which will affect the accurate positioning of hoisting operation and seriously reduce the loading and unloading efficiency, and bring hidden dangers to production safety. Therefore, it is necessary to study its rocking characteristics under various working conditions and master its law. In this paper, the prototype model of bridge crane is established through virtual prototype technology and the swing characteristics of the lifting weight under different working conditions are analyzed.Firstly, aiming at the lifting mechanism of bridge crane, the dynamic mathematical models of lifting swing in two-dimensional and three-dimensional space are established in this paper. The two-dimensional swing of crane is modeled and simulated by using the Simulink module of MATLAB software, and the swing angle-time curve under different driving force, pendulum length and lifting mass is obtained.Secondly, the dynamic simulation model of crane is established in the dynamics software RecurDyn by using virtual prototyping technology. Taking the wire rope winding system of the triple hoisting mechanism of the general bridge crane as the research object, the flexible body model of the wire rope system is established by using the finite element flexible body (F-Flex) method, and the constraint and drive are added to simulate the motion under various working conditions. By comparing and analyzing the simulation results, it can be concluded that the maximum load swing deviation is the emergency stop condition, followed by the complete operation condition. When the acceleration of the large and small vehicles is fixed, different lifting weights have no effect on the load swing. As the length of the pendulum increases, the swing deviation of the lifting weight in the space is also greater. Then the theoretical analysis of this paper is compared with the model simulation to further verify the reliability of the prototype model.大连理工大学专业学位硕士学位论文Finally, the experimental plan of the lifting swing test was designed, and the experimental platform was set up for the structural parameter setting and the calculation of the selection of the motor, reducer, and frequency converter. The sensors of the motion state variables such as the lifting weight swing angle, lifting and landing speed, the speed and acceleration of cart and trolley are selected. The actual data measurement and collection are carried out through the sensor, and the reasons for the difference between the analysis and the prototype model are studied and corrected accordingly.Key Words: Bridge crane; Dynamic modeling; Virtual prototype; Lifting weight swing; Experimental scheme design桥式起重机吊重摇摆特性的建模与仿真研究目录摘要 (I)Abstract (II)1 绪论 (1)1.1 研究背景与意义 (1)1.2 钢丝绳与滑轮接触关系研究现状 (3)1.3 起重机现有防摇技术研究现状 (4)1.4 本文的主要内容 (5)2 吊重系统动力学建模基本理论 (7)2.1 多刚体系统动力学基础 (7)2.2 刚柔耦合多体系统动力学建模理论 (7)2.2.1 模态柔性体建模原理 (7)2.2.2 有限元柔性体建模原理 (8)2.3 多体系统动力学分析 (12)2.4 本章小结 (13)3 桥式起重机吊重系统动力学建模与分析 (14)3.1 桥式起重机吊重系统动力学建模 (14)3.1.1 桥式起重机基本结构和运动分析 (14)3.1.2 吊重系统三维动力学建模 (16)3.1.3 吊重系统二维动力学建模 (18)3.2 桥式起重机吊重系统摇摆仿真分析 (21)3.2.1 吊重系统二维摆动的仿真模型 (21)3.2.2 吊重摆动角度的影响因素分析 (23)3.3 本章小结 (26)4 桥式起重机吊重系统动力学建模仿真 (27)4.1 样机技术 (27)4.1.1 虚拟样机技术 (27)4.1.2 数字样机技术 (27)4.2 基于RecurDyn的轮绳接触多体系统虚拟样机建模 (28)4.2.1 RecurDyn软件介绍 (28)4.2.2 样机建模 (30)4.3 吊重摇摆特性仿真分析 (33)4.3.1 吊重系统摇摆特性仿真 (33)4.3.2 不同摆长对吊重系统摇摆影响 (40)4.3.3 不同起重量对吊重系统摇摆影响 (42)4.4 样机模型仿真结果与Simulink仿真结果对比分析 (44)4.5 本章小结 (44)5 桥式起重机吊重摇摆测试实验方案设计 (45)5.1 平台结构设计 (45)5.2 主结构电机选取 (48)5.2.1 起升机构电机选型 (48)5.2.2 小车驱动电机选型 (50)5.2.3 大车驱动电机选型 (52)5.2.4 变频器选型 (54)5.3 传感器选取 (55)5.3.1 加速度、角度测量传感器 (55)5.3.2 速度测量传感器 (56)5.4 实验工况设计 (57)5.5 本章小结 (58)结论 (59)参考文献 (61)攻读硕士学位期间发表学术论文情况 (65)致谢 (66)大连理工大学学位论文版权使用授权书 (67)1 绪论1.1研究背景与意义在重大工程的施工建设中,起重机发挥着不可或缺的作用,如大型石化工程建设、重大桥隧工程建设、核电风电建造安装、海洋能源开采、大型舰船(如航母)建造维护及安全救援等多个领域,如图1.1所示。
基于PLC在起重机中的防摇控制应用摘要:随着时代的发展,我国社会不断进步。
起重机是用来搬运重物或在短距离内水平起重的设备,其中桥式起重机的机载质量较小,适用范围较广。
桥式起重机运行中挠度为主要检测指标,将其作为检测标准,能够在一定程度上分析起重机的位移状况并及时调整起重机工作状态。
而起重机每天要进行上千次的操作,其内在的绕线式电机主要依靠控制元件来完成电机转子的串联和切换,因此产生的故障频次较高。
随着起重机技术的不断发展,传统的控制技术已经不能满足起重机的生产效率,需要利用现代控制技术对传统方式进行改造。
关键词:PLC技术;起重机;防摇控制;应用引言在PLC元件中,操作人员能够精准判断和识别各项数据信息的存储形式是否合理,并结合各项自动化控制装置的具体逻辑判断规则以及数据处理结果,动态化分配存储空间,还能够保留继电器等装置的各项功能和性能参数。
在详细设计和实现PLC元件的各项功能模块过程中,可以将不同类型的输入信号与数据源进行有效链接,并精准判断各项数据指标的合法性以及正确性。
PLC的自动控制原理主要涵盖对数字量、模拟量等数据信息的输入输出控制过程,并且需要按照指定的编程设计原则和算法流程,精准判断和识别计算结果的正确性和合法性。
PLC技术能够被广泛应用在相关工业技术领域之中,呈现较为强大的自动控制效果,还能够提升工业控制系统装置的综合利用效率。
1概述PLC是可编程逻辑控制器的简称,通过可编程存储器进行逻辑运算以及流程控制等多种操作指令,运用计算机技术应用基础在数据处理等方面发挥关键作用,逐渐成为工业控制中不可缺少的存在。
中央处理器是PLC组成的关键部分,除此之外还需要存储器、接口电路以及I/O电路等关键组成部分,为自动化流程控制起到协调作用。
存储器将系统信息数据以及用户操作等信息进行存储,接口电路通过与重要接口相连的方式形成现场设备,最终输出电路转化对其进行驱动。
2LC技术的应用优势2.1反应快速在电气自动化系统内,辅助继电器是PLC技术的应用结构,利用其去除掉内部的部分连接导线。
基于数据驱动的桥式起重机防摇控制策略在桥式起重机的运行过程中,由于吊钩上吊的重物会受到风力等外部因素的影响,从而导致起重机在作业过程中出现晃动和摇晃的情况,这不仅会影响作业效率,还会对安全性造成威胁。
提出了一种基于数据驱动的桥式起重机防摇控制策略,通过对起重机运行过程中产生的数据进行分析和处理,实现对起重机的防摇控制,保障其稳定性和安全性。
一、数据采集和处理在桥式起重机运行过程中,可以通过各种传感器对起重机的运行状态进行实时监测和数据采集,如吊钩位置、载荷大小、风力情况等。
这些数据可以通过数据处理系统进行处理和分析,得到吊钩的摆动情况、风力大小等关键信息,为后续的防摇控制策略提供数据支撑。
二、数据建模和预测通过对采集的数据进行建模和分析,可以得到起重机在不同工况下的摆动规律和趋势。
基于这些数据建模结果,可以预测起重机在特定工况下可能出现的摆动幅度和频率,为制定防摇控制策略提供依据。
三、控制策略制定基于数据模型和预测结果,可以制定针对不同工况的防摇控制策略。
在风力较大的情况下,可以通过调整起重机的运行速度和加减速曲线,减小起重机的摇摆幅度;在吊钩载荷较大的情况下,可以通过调整起吊速度和加减速曲线,减小载荷对起重机的摇摆影响。
还可以通过调整起重机的结构参数和增加辅助设备等方式,进一步提高起重机的防摇控制能力。
四、实时监测和调整在起重机实际作业过程中,可以通过实时监测系统对起重机的运行状态进行监控和分析,一旦发现起重机出现摇摆情况,可以及时采取相应的控制措施,调整起重机的运行参数,保障其稳定性和安全性。
基于数据驱动的桥式起重机防摇控制策略通过对起重机运行过程中产生的数据进行分析和处理,制定针对不同工况的防摇控制策略,实现对起重机的防摇控制,保障其稳定性和安全性。
这种控制策略不仅能有效减小起重机的摆动幅度,提高作业效率,还能有效降低起重机的运行风险,具有重要的工程应用价值。
桥式起重机是一种常用的工程机械设备,用于吊装和搬运重物。
本技术公开了一种基于机器视觉的起重机防摇摆控制方法,实时识别并跟踪吊钩摆动轨迹,根据其摆动的角度、幅度和频率,在大小车加(减)速时自适应控制调整大小车的加减速频率曲线,实现智能防摇功能。
本技术针对吊重的闭环实时防摇,适应力强,防摇效果好。
技术要求1.一种基于机器视觉的起重机防摇摆控制方法,其特征在于,包含以下步骤:步骤1),在起重机上小车设置工业相机以实时采集吊钩图像,并将采集到的吊钩图像传递给起重机的工控机;步骤2),工控机根据采集的图像基于机器视觉技术实时追踪吊钩摆动轨迹,获得吊钩的动角度摆动幅度和摆动周期ωx;步骤3),固定绳长的吊重系统吊钩摆动方程如下:式中,l表示绳长,g表示重力加速度,x表示起重机运动机构的水平位移,表示运动机构的加速度,θx表示吊重摆角,表示吊重摆角角加速度;当起重机大小车需要加速或减速时,将该时刻t0的摆动角度和摆动幅度作为方程(1)的初始条件,代入方程(1),求得吊重的加/减速时间t和加/减速度a;使得在运动机构加速或减速完成时吊重的摆角θx和角速度最小;步骤4),工控机将计算出来的吊重的加/减速时间t和加/减速度a的传递给可编程逻辑控制器PLC,PLC基于起重机大小车电机的转速、车轮直径和减速比参数将加/减速时间和加/减速度转化成实时的频率曲线后传递给起重机的变频器,精确驱动电机的加减速。
2.根据权利要求1所述的基于机器视觉的起重机防摇摆控制方法,其特征在于,步骤3)中求解方程(1)时的具体步骤如下:令大小车的加减速过程为3段,每段为匀加/减速运动;求得加/减速时间t={t1,t2,t3}和加/减速度a={a1,a2,a3};加/减速时间和加/减速度满足约束方程:其中t0和v0分别为加/减速前的时间和速度,ts和vs分别为加/减速完成时的时间和速度;将所有满足方程(2)的加速度a和加速时间t代入方程(1),加/减速完成时吊重的摆角θx和角速度最小的为最优解。
技术说明书一种基于机器视觉的起重机防摇摆控制方法技术领域本技术涉及机器视觉的应用和运动控制方法,尤其涉及一种基于机器视觉的起重机防摇摆控制方法。
起重机防摇技术研究
摘要:在起重机的启动和停止以及加速和减速过程中,很容易使吊具左右或前后摆动,在一定程度上影响了起重装卸效率和提高了司机的劳动强度,因此我们要通过采用先进的防摇技术,通过实现对起重机的准确定位来起重机效率。
文章主要对
plored.
Keywords:crane;anti-shaketechnology;electronicanti-sway
一、前言
吊具的摇摆问题,一直是令起重行业设计和调试人员头痛的一个问题。
起重机在装卸货物时,由于其速度的变化以及外界干扰因素的影响,使吊具前后、左右的
,考虑
,但
机械式防摇技术通过在小车架下安装防摇装置,包括减摇钢丝绳、卷筒和力矩限制器传动链及带单向轴承的卷筒和制动器,通过机械手段消耗摆动的能量以实现最终消除摇摆的目的,从而提高起重机的工作效率。
要控制吊具的摇摆,首先就必须采用合理的钢丝绳缠绕方式,使车架上起升滑轮
与吊具上牵引滑轮在同一平面内偏离成一定角度;利用单向轴承控制卷筒的旋转方向,通过实现放绳方向与传动轴相互锁合,保证卷筒只能向钢丝绳收绳方向旋转;在其重机作业过程中,通过对力矩限制器加以持续通电,始终给减摇钢丝绳一个张力,将其卷起,避免减摇钢丝绳的处于松散状态。
当出现吊具摇摆情况时,通过设定弹簧力来调整制动器给减摇钢丝绳的张力,从而保证在不同情况下阻止吊具的摇
摆。
目前大多数机械式防摇装置都是基于这个原理,但是该防摇装置非常复杂,可靠性又不高,因此维修保养的工作量较大,而且防摇效果并不是十分理想;另外还可以通过增加悬挂系统刚性抑制摇摆,此类装置同样存在维修保养工作量大和防摇效果不理想的缺点,因此机械式防摇技术还有待于改进和提高。