基于LMI的模型预测控制器设计
- 格式:pdf
- 大小:1.96 MB
- 文档页数:7

基于最小二乘支持向量机的MIMO线性参数变化模型辨识及预测控制冯凯;卢建刚;陈金水【摘要】This paper presents a least-square support vector machine based linear parameter-varying model approach for multiple-input multiple-output nonlinear system (MIMO-LSSVM-LPV). The identified model can be used in the model predictive control scheme combined with genetic algorithm (GA-MPC). The new identification and controlling integration scheme is named MIMO-LSSVM-LPV+GA-MPC. Simulation results show that the identification algorithm can approximate complex nonlinearity with high accuracy while keep the advantage of low computational burden of linear regression. GA based MPC can get the real-time optimal control input and achieve good controlling performance.%将现有的面向单输入单输出系统的基于最小二乘支持向量机的参数变化模型辨识算法(SISO-LSSVM-LPV),推广到多输入多输出系统,实现了面向多输入多输出系统的基于最小二乘支持向量机的参数变化模型辨识算法(MIMO-LSSVM-LPV),进一步结合基于遗传算法的预测控制算法(GA-MPC),提出并实现了MIMO-LSSVM-LPV+GA-MPC的建模控制一体化新架构。
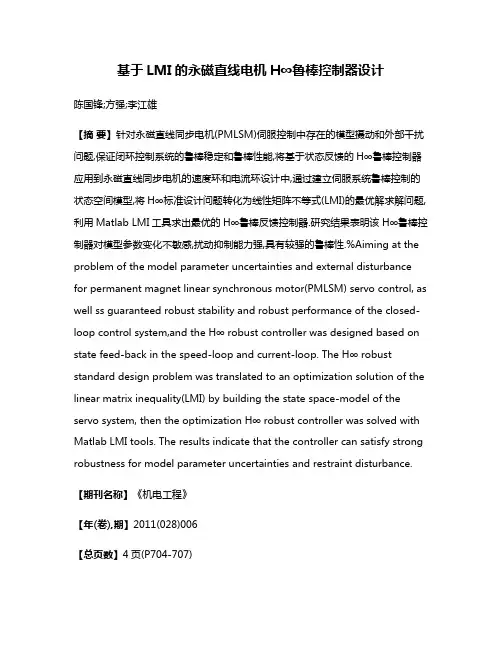
基于LMI的永磁直线电机H∞鲁棒控制器设计陈国锋;方强;李江雄【摘要】针对永磁直线同步电机(PMLSM)伺服控制中存在的模型摄动和外部干扰问题,保证闭环控制系统的鲁棒稳定和鲁棒性能,将基于状态反馈的H∞鲁棒控制器应用到永磁直线同步电机的速度环和电流环设计中,通过建立伺服系统鲁棒控制的状态空间模型,将H∞标准设计问题转化为线性矩阵不等式(LMI)的最优解求解问题,利用Matlab LMI工具求出最优的H∞鲁棒反馈控制器.研究结果表明该H∞鲁棒控制器对模型参数变化不敏感,扰动抑制能力强,具有较强的鲁棒性.%Aiming at the problem of the model parameter uncertainties and external disturbance for permanent magnet linear synchronous motor(PMLSM) servo control, as well ss guaranteed robust stability and robust performance of the closed-loop control system,and the H∞ robust controller was designed based on state feed-back in the speed-loop and current-loop. The H∞ robust standard design problem was translated to an optimization solution of the linear matrix inequality(LMI) by building the state space-model of the servo system, then the optimization H∞ robust controller was solved with Matlab LMI tools. The results indicate that the controller can satisfy strong robustness for model parameter uncertainties and restraint disturbance.【期刊名称】《机电工程》【年(卷),期】2011(028)006【总页数】4页(P704-707)【关键词】永磁直线同步电机;线性矩阵不等式;H∞鲁棒控制【作者】陈国锋;方强;李江雄【作者单位】浙江大学,机械工程学系,浙江杭州310027;浙江大学,机械工程学系,浙江杭州310027;浙江大学,机械工程学系,浙江杭州310027【正文语种】中文【中图分类】TP273;TH390 引言直线电机采用直接驱动方式,具有响应速度快,灵敏度高,且永磁直线电机的定子永磁体采用模块化设计,定子长度可以无限增加。

基于LMI的倒立摆滑模控制器设计任鹏飞;赵玉顺;崔勇;李雪健【摘要】倒立摆是典型的欠驱动系统,针对其复杂非线性和存在不确定干扰的问题,提出了滑模控制器设计方案.以线性化模型为基础设计滑模切面,完成了对模型确定部分的控制设计,以及对不确定干扰的补偿输入.以线性矩阵不等式方法辅助完成滑模面和反馈增益的计算,避免了参数调试对设计经验的依赖.通过软件仿真和固高倒立摆测试对所提的控制方案进行测试,结果表明控制器有效实现了倒立摆的稳定控制.【期刊名称】《河南工程学院学报(自然科学版)》【年(卷),期】2017(029)004【总页数】4页(P62-65)【关键词】滑模控制;欠驱动;倒立摆;线性矩阵不等式【作者】任鹏飞;赵玉顺;崔勇;李雪健【作者单位】河南工程学院电气信息工程学院,河南郑州451191;河南顺康机电设备有限公司,河南郑州450007;河南工程学院电气信息工程学院,河南郑州451191;河南工程学院电气信息工程学院,河南郑州451191【正文语种】中文【中图分类】TS111倒立摆是多变量、强耦合的不稳定系统,被公认为是控制领域中验证控制策略的首选试验平台[1-3].该系统以唯一的拖动输入实现小车位置和摆杆角度的多变量控制,独立控制变量个数小于系统自由度个数,是典型的欠驱动系统.欠驱动系统在节约能量、降低造价、减轻质量、增强系统灵活度等方面都比完全驱动系统优越.由于系统的高度非线性、参数摄动、多目标控制要求及控制量受限等原因,而且它又足够复杂,所以欠驱动系统便于研究和验证各种算法的有效性[4].由于倒立摆系统存在复杂非线性和不确定干扰,采用线性化的模型所设计的控制器通常无法获得较好的控制效果.例如,经典的PID需要在调试时反复试凑控制参数,而无法直接处理复杂系统.线性二次优化的LQR方法,其加权函数阵的选择需要依赖经验反复试凑,实时控制效果不理想.由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得变结构滑模控制具有快速响应的特点,采用滑模控制方法可以有效地实现一类欠驱动系统的鲁棒控制[5-7].为了优化倒立摆稳定控制效果,将滑模控制方法用于反馈控制器设计.利用滑模控制对参数变化及扰动不灵敏、不需要系统在线辨识、物理实现简单等优点,实现倒立摆小车位置和摆杆角度的控制优化.在滑模函数的设计中,需要考虑约束条件,在控制问题中转化为线性矩阵不等式约束的最优化问题.采用Matlab软件中提供的LMI工具完成求解计算,以得到反馈控制增益和滑模面所需要的正定矩阵.小车倒立摆基本结构如图1所示.忽略空气阻力的影响并将摆杆视为刚体,以简化系统建模分析.利用牛顿力学方法可分别对摆杆和滑动小车进行运动分析,系统建模详细步骤见文献[2],这里不再赘述.直接给出其动力学模型:式中各参数的物理意义参见图1,摆杆转动惯量I=ml2.取系统状态变量为可得系统的状态空间方程:式中:其中a1= , a2=-,b1= , b2= .通过设计拖动力u的大小和方向,使小车移动到目标位置并保持摆杆倒立不倒.不失一般性,系统控制目标为x→O.基于式(3)的状态空间方程进行倒立摆系统的滑模控制器设计.考虑到不确定性和干扰 f(x,t),系统方程(3)可修正为式中的干扰信号是有界的,记|f(x,t)|≤δf.定义滑模函数为s=BTPx.这里,P为4×4阶正定矩阵,通过P的合理设计实现s=0.这里先讨论滑模控制器的可行性,而正定矩阵P的计算将在2.2给出.考虑不确定干扰信号,系统的控制输入包括两个部分:滑模等效控制ueq,提供控制系统所需的确定控制量;扰动补偿控制un,用来修正不确定干扰因素的不利影响.因此,设计滑模控制器为式中的滑模等效控制和扰动补偿控制分别为滑模控制器以实现s=0为设计目标,式(5)综合控制器设计的合理性可以通过Lyapunov稳定性理论加以说明.取Lyapunov函数为V1=s2,由于所以,式(9)中Lyapunov函数的负定表明存在t≥t0,使得s=BTPx=0.采用LMI方法来设计滑模函数中的对称正定矩阵P.将控制律(5)写作式中:v(t)=Kx+ueq+un.那么,系统方程(4)重新整理为式中:通过设计K使得为Hurwitz矩阵,则可保证闭环系统稳定.再取Lyapunov函数为V=xTPx,可得由式(8)和式(9)分析可知,存在t≥t0,使得s=BTPx=0,即sT=xTPB=0成立,所以有至此,为了保证需要用P-1分别乘以式(13)的左右两边,得取L=KP-1,则整理为线性矩阵不等式,有利用Matlab的LMI工具箱进行辅助计算,可得到正定矩阵P和反馈控制增益矩阵K.设计过程中,为了保证P为对称正定矩阵,需要满足P=PT>0.通过Matlab仿真和固高倒立摆联机试验,验证所提滑模控制方案的有效性.控制系统中的主要参数包括重力加速度g=9.8 m/s2,小车质量M=1 kg,摆杆质量m=0.1 kg,摆杆一半的长度l=0.5 m.仿真中用 f(x,t)=0.3 sin t模拟线性建模中忽略的不确定干扰.采样时间t=20 ms,并设置系统初始状态为].采用滑模控制器,取δf=0.3,ε0=0.15.采用饱和函数代替切换函数,边界层厚度取Δ=0.05.这里需要指出,边界层厚度越小,控制效果越好,但同时又会使控制增益变大,抖阵增强;反之,边界层厚度越大,抖阵越小,但又会使控制增益变小,控制效果差.边界层的设置仅能保证系统状态收敛到以滑动面为中心的边界层内.可以通过较窄的边界层来任意地接近滑模,但不能使状态收敛到滑模.利用LMI解算工具箱对式(16)进行计算,得到正定矩阵P和反馈矩阵K:利用所得控制参数测算倒立摆小车的拖动输入,在Matlab/Simulink中进行仿真,得到小车的运动位置和摆杆的角度变化,如图2和图3所示.从仿真结果可以看出,摆杆角度和小车位置3 s后即到达目标位置并持续保持在目标值,仿真输出曲线存在小幅抖阵,波动幅值与滑模面切换和不确定干扰项的存在有关.图4为固高倒立摆试验平台,由控制主机、运动控制箱和倒立摆机械部分组成.在Matlab仿真分析基础上,将所得控制输出信号转接固高倒立摆的运动控制板的通信端口,测试所设计滑模控制器的实时控制效果.启动程序时,先将摆杆扶到竖直向上位置附近,即给倒立摆一个接近平衡位置的初始值.数据输出端采集摆杆角度变化和小车运动位置变化,如图5和图6所示.与仿真不同,要将竖直向上的目标位置的摆角设为-3.14 rad.从图5和图6可以看出,小车在目标位置小幅摆动,摆动幅度小于0.03 m,摆杆角度的摆动幅度也小于0.03 rad.仿真数据和试验结果表明了所得控制器的有效性.本设计主要讨论了滑模控制方法在倒立摆稳定控制中的应用.针对倒立摆建模过程中的复杂非线性和系统控制中的不确定干扰因素,提出了滑模控制方法进行控制器设计,并且利用线性矩阵不等式辅助方法完成了反馈控制参数的计算和滑模面的确定.仿真结果和基于固高倒立摆的联机测试结果表明,所设计的控制器能够使倒立摆快速稳定地到达目标位置.【相关文献】[1] 赵晓军,刘成忠,胡小兵.基于果蝇优化算法的PID控制器设计与应用[J].中南大学学报(自然科学版),2016,47(11):3729-3734.[2] 王瑶为,邢科新,马剑,等.直线一级倒立摆的自抗扰控制方法及实现[J].控制工程,2017,24(4):711-715.[3] 王贤明,陈炜,赵新华.倒立摆系统起摆与稳摆控制算法研究综述[J].自动化技术与应用,2015,34(11):5-9.[4] 孙宁,方勇纯,陈鹤.欠驱动惯性轮摆系统全局滑模控制[J].控制理论与应用,2016,33(5):653-661.[5] 刘永慧.滑模变结构控制的研究综述[J].上海电机学院学报,2016,19(2):88-93.[6] 薛鹏,任鹏飞,曹学儒.四旋翼飞行器滑模控制的稳定性分析[J].河南工程学院学报(自然科学版),2015,27(1):33-35,43.[7] 辛腾达,范惠林,闫琳.滑模变结构制导律的抖振问题研究[J].航空兵器,2015(2):10-13.。
基于LMI的旋转起重机鲁棒控制器设计欧阳慧珉;佐野滋则;内山直树;张广明;王德明;梅磊【期刊名称】《振动与冲击》【年(卷),期】2014(000)001【摘要】悬绳和荷载组成的振动系统的固有频率变化会对控制系统的稳定性和控制性能产生影响,因此针对此问题提出一种低复杂度的鲁棒控制器设计方法。
首先,采用干扰观测器导出起重机的线性模型。
该模型对于关节摩擦,荷载质量以及旋转速度等参数变化具有鲁棒性。
其次,基于该线性模型设计一个含有积分器的状态反馈控制器,其增益通过线性矩阵不等式(LMI)优化算法求出,并且该控制器对于绳长变化具有鲁棒性。
最后,比较仿真和实验结果验证所提方法的有效性。
通过使用此法可以实现在无测量绳长的传感器系统的情况下容易地操作起重机,从而大大地简化其结构和降低其安装成本。
【总页数】7页(P106-112)【作者】欧阳慧珉;佐野滋则;内山直树;张广明;王德明;梅磊【作者单位】南京工业大学自动化与电气工程学院,南京 211816;日本丰桥技术科学大学机械工程系,丰桥 441 -8580;日本丰桥技术科学大学机械工程系,丰桥441 -8580;南京工业大学自动化与电气工程学院,南京 211816;南京工业大学自动化与电气工程学院,南京 211816;南京工业大学自动化与电气工程学院,南京211816【正文语种】中文【中图分类】TH21【相关文献】1.基于LMI优化的鲁棒控制器设计 [J], 吕申;武俊峰2.基于LMI的无人直升机姿态解耦鲁棒控制器设计 [J], 王勇;郭润夏;谈斌3.基于LMI的4WS-4WD车辆H∞鲁棒控制器设计 [J], 殷国栋;吴昊;张宁;陈建松4.基于LMI技术的船舶舵减摇鲁棒控制器设计 [J], 杨鹤;程权成;崔宝影5.基于LMI的鲁棒控制器的设计及在四轮转向系统中的应用 [J], 崔宝影;程权成因版权原因,仅展示原文概要,查看原文内容请购买。
基于LMI直升机奇异系统鲁棒稳定控制器的设计
陈亮;孙楠;刘克平
【期刊名称】《吉林大学学报(信息科学版)》
【年(卷),期】2009(027)006
【摘要】针对三自由度直升机奇异系统鲁棒稳定性分析复杂,且难以设计稳定的控制器问题,基于状态空间方法建立了三自由度直升机模型的线性动力学系统模型.利用线性矩阵不等式(LMI:Linear Matrix Inequality)推导并证明了奇异系统鲁棒渐进稳定的条件,提出了一类奇异系统鲁棒稳定状态反馈控制率的设计方法,并绘出三自由度直升机系统的状态响应曲线.实验结果表明,该控制器比LQR(Linear Quadratic Regulator)控制器具有更好的稳定性和鲁棒性.
【总页数】6页(P628-633)
【作者】陈亮;孙楠;刘克平
【作者单位】长春工业大学,电气与电子工程学院,长春,130012;深圳机场出入境边防检查站,深圳518128;长春工业大学,电气与电子工程学院,长春,130012
【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于LMI的无人直升机姿态解耦鲁棒控制器设计 [J], 王勇;郭润夏;谈斌
2.不确定非线性时滞奇异系统的鲁棒稳定控制器设计 [J], 李文姿
3.基于LMIs的连续Markovian跳变系统稳定性分析及控制器设计 [J], 王瑾;董泽
4.离散系统奇异H^∞控制问题的降阶控制器设计:LMI方法 [J], 郭雷;忻欣;冯纯伯
5.奇异系统基于状态观测器的鲁棒故障诊断残差产生器设计的LMI方法 [J], 陈莉因版权原因,仅展示原文概要,查看原文内容请购买。
基于LMI的船舶力控减摇鳍系统H_∞控制器设计
张晓宇;金鸿章;李国斌;吉明
【期刊名称】《船舶工程》
【年(卷),期】2002(0)2
【摘要】本文针对海浪的随机干扰、船舶模型的不确定性和控制器的输出约束 ,采用升力反馈控制的全新方法建立系统数学模型 ,用基于
LMI(LinearMatrixInequality)的H∞ 控制方法 ,考虑混合灵敏度S/KS问题 ,设计了H∞ 控制器 ,对混合灵敏度S/KS问题模型、权函数的选择等问题进行了研究 ,充分地利用了LMI法进行H∞ 设计时的优势 ,并对LMI法的优势进行了系统的说明和讨论 ,通过仿真验证了这一设计的可行性。
所设计的力控减摇鳍系统不但具有抗干扰性能。
【总页数】4页(P24-27)
【关键词】力控减摇鳍;LMI;H∞鲁棒控制器;混合灵敏度S/KS问题;船舶;设计【作者】张晓宇;金鸿章;李国斌;吉明
【作者单位】哈尔滨工程大学自动化学院
【正文语种】中文
【中图分类】U664.72
【相关文献】
1.船舶力控减摇鳍模糊控制器设计及稳定性分析 [J], 修智宏;任光
2.船舶力控减摇鳍系统建模与仿真 [J], 张晓宇;金鸿章;李国斌;吉明
3.基于LMI技术的船舶舵减摇鲁棒控制器设计 [J], 杨鹤;程权成;崔宝影
4.船舶减摇鳍模糊控制器的系统化设计与仿真 [J], 修智宏;任光
5.船舶力控减摇鳍伺服系统研究 [J], 张晓宇;金鸿章;李国斌;吉明
因版权原因,仅展示原文概要,查看原文内容请购买。
目录摘要 (1)关键词 (1)Abstract (1)Key words (1)引言 (1)1 LMI工具箱介绍和使用 (2)1.1 系统描述 (2)1.2 信息检 (3)1.3 问题求解 (3)1.4 结果验证 (3)2 LMI基础知识 (3)2.1 LMI的一般形式 (4)2.2 描述LMI的相关术语 (4)2.3 LMI应用的基本问题 (5)2.4 LMI不等式问题 (5)2.5 三类标准的LMI控制问题及其相应的求解器 (6)2.5.1 可行性问题 (6)2.5.2 具有线性矩阵不等式约束的一个线性目标函数的最小化问题 (6)2.5.3 广义特征值最小化问题 (6)3 LMI工具箱函数详解 (8)3.1 LMI工具箱函数列表 (8)3.2 确定LMI系统的函数 (9)3.3 对LMI变量的操作 (10)3.4 LMI求解器命令 (10)3.5 结果验证和修改 (12)3.5.1 结果验证 (12)3.5.2 结果修改 (12)3.6 LMI系统信息提取 (12)4 线性矩阵不等式在控制理论中的应用 (13)4.1 LMI用于控制问题常用的技术 (14)4.1.1 矩阵操作技术 (14)4.1.2 LFT(Linear Fraction Transformation)和多胞(polytopy)表示方法 (14)4.2 在控制理论中的应用举例 (14)4.3 用线性矩阵不等式求解控制问题的实例 (15)4.4基于LMI的鲁棒控制器设计 (16)5 结论和展望 (19)致谢 (20)参考文献 (21)Matlab中的LMI工具箱的研究与使用摘要:由于内点算法可以利用计算机求解高阶矩阵不等式,使得线性矩阵不等式(LMI)在控制理论得以应用,因而线性矩阵不等式在控制系统分析、设计中扮演着越来越重的角色。
在毕业设计中,我学习了LMI理论,Matlab中LMI工具箱的使用,研究了常见的控制问题与LMI关系以及其表达式,并研究了基于LMI方法的鲁棒控制器设计问题,推导了如何将鲁棒控制器设计问题转化为LMI 形式,给出了通过求解LMI方程构造控制率的算法。
基于LMI的约束Hammerstein系统最优控制器设计
陈俊杰;何德峰;俞立
【期刊名称】《浙江工业大学学报》
【年(卷),期】2010(038)005
【摘要】针对具有输入约束的Hammerstein系统,提出了一种基于线性矩阵不等式(LMI)的最优控制器设计方法.运用非线性分离两步法控制策略,首先通过线性矩阵不等式(LMI)技术给出Ham-merstein模型线性子系统的状态反馈最优控制;其次,通过求解非线性方程组计算实际控制量.两步法策略充分利用了Hammerstein模型的特殊结构,把控制器设计问题仍归结在线性控制系统范围内.进一步,利用Lyapunov稳定性理论建立了闭环稳定的充分条件.最后通过聚丙烯牌号切换的仿真验证笔者算法的有效性.
【总页数】5页(P552-556)
【作者】陈俊杰;何德峰;俞立
【作者单位】浙江工业大学,信息工程学院,浙江,杭州,310032;浙江工业大学,信息工程学院,浙江,杭州,310032;浙江工业大学,信息工程学院,浙江,杭州,310032
【正文语种】中文
【中图分类】TP273
【相关文献】
1.航空发动机用基于LMI控制受约束的PI控制器设计 [J], 覃道亮;王曦
2.极点约束下TCSC的LMI鲁棒控制器设计 [J], 吴春芳;钟云
3.积分二次约束线性系统的H∞控制器设计:一种LMI方法 [J], 胡中骥;施颂椒;翁正新
4.线性不确定系统最优保成本滤波器设计的LMI方法 [J], 刘诗娜;费树岷;冯纯伯
5.基于LMIs的连续Markovian跳变系统稳定性分析及控制器设计 [J], 王瑾;董泽因版权原因,仅展示原文概要,查看原文内容请购买。