课件--模型预测控制
- 格式:ppt
- 大小:1.20 MB
- 文档页数:96



专题1作业
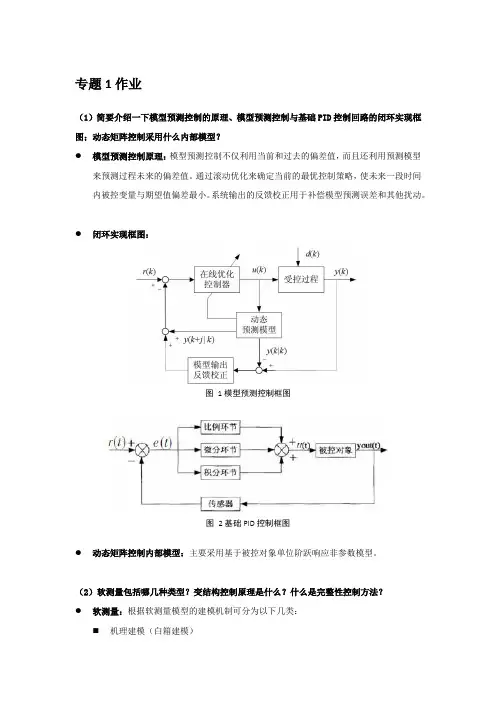
(1)简要介绍一下模型预测控制的原理、模型预测控制与基础PID控制回路的闭环实现框图;动态矩阵控制采用什么内部模型?
●模型预测控制原理:模型预测控制不仅利用当前和过去的偏差值,而且还利用预测模型
来预测过程未来的偏差值。
通过滚动优化来确定当前的最优控制策略,使未来一段时间内被控变量与期望值偏差最小。
系统输出的反馈校正用于补偿模型预测误差和其他扰动。
●闭环实现框图:
图1模型预测控制框图
图2基础PID控制框图
●动态矩阵控制内部模型:主要采用基于被控对象单位阶跃响应非参数模型。
(2)软测量包括哪几种类型?变结构控制原理是什么?什么是完整性控制方法?
●软测量:根据软测量模型的建模机制可分为以下几类:
⏹机理建模(白箱建模)
⏹数据驱动建模(黑箱建模)
⏹混合建模
⏹非线性动态软测量建模
●变结构控制原理:在动态控制中,根据系统当时状态,以跃变方式有目的地不断变换,
迫使系统按预定的“滑动模态”的状态轨迹运动。
变结构是通过切换函数实现的。
当系统的状态向量所决定的切换函数值,随着它的运动达到某特定值时,系统中一种结构(运动微分方程)转变成另一种结构。
其系统结构图如下所示。
图3变结构控制系统框图
●完整性控制方法:完整性控制是容错控制的研究热点,所谓完整性是指当系统中某些部
件失效后,系统仍能够稳定工作的特性。
基于该特性的控制方法即为完整性控制方法。


先进控制技术”第二章第二章模型测控制模型预测控制—MPC Model PredictiveC lControl) )本讲内容要点))))))模型预测控制在工业中的应用举例模型预测控制的发展背景)))预测控制的特点(1)))))有约束条件、大纯滞后、非最小相位及)预测控制的发展)))国内外先进控制软件包开发所走的道路212.1 预测控制的基本原理))现在一般则更清楚地表述为:模型、滚动优化、反馈反馈2112.1.1.预测模型(内部模型) ))差分方程阶跃响应2112.1.1.预测模预测型(内部模型)3未来过去y 14u2k 时刻1—控制策略Ⅰ;2—控制策略Ⅱ;3—对应于控制策略Ⅰ的输出;的输出4—对应于控制策略Ⅱ的输出。
图2-1 基于模型的预测2.1.2. 滚动优化(在线优化)212))212K 时刻优化2.1.2.滚动优化(在线优化).y ry213uk +1时刻优化y r21yu31─参考轨迹(虚线)y r ; 2─最优预测输出y (实线);─k +1`k t/T 3最优控制作用u 。
图2-2滚动优化2.1.3. 反馈校正213)实际测到的输出信息对基于模型的预测输出进行修正,然后再进行新对预测输出值作出修正使滚动优化不但基于模型,而且利用了反馈信息构成闭环优化息,构成闭环优化。
2.1.3.反馈校正(误差校正)2413yu k k +1时刻的测输出时刻实输出t/T2-31─k 时刻的预测输出;2─k +1时刻实际输出;3─预测误差;4─k +1时刻校正后的预测输出。
图23 误差校正222.2 动态矩阵控制(DMC) )a≈a)(∞N221DMC 2.2.1. DMC的预测模型(1)模型截断ya Na N-10123a 3a 2a 1N N-1t/T 图2-4 系统的单位阶跃采样数据示意图2.2 动态矩阵控制(DMC)22)))则保证了可用线性系统的迭加性等2.2.1. DMC的预测模型(2)221DMC, t=k T时刻预测未来N个时刻))+M 1y PM (k)a P-M+1Δu(k +M-1)+3/y M (k 3/k)y M (k +2/k)a 1Δu(k +2)a P-1Δu(k +1)y M (k +1/k)a 1Δu(k +1)a 2Δu(k +1)a P Δu(k)y P0(k)y 0(k +1/k)a 1Δu(k)a 2Δu(k)a 3Δu(k)y 0(k +2/k)k k+1k+2k+3k+P t/T y M (k +3/k)图2-5 根据输入控制增量预测输出的示意图2.2.1. DMC的预测模型(3)221DMC))是滚动优是控制时域长度。
模型预测控制模型预测控制(Model Predictive Control,MPC)是一种现代控制方法,被广泛应用于工业过程和汽车控制等领域。
MPC基于数学模型对未来系统行为进行预测,并通过优化算法计算当前时刻的最优控制动作。
本文将全面讲解MPC的原理、应用以及优缺点等方面。
MPC的基本原理是通过使用系统数学模型对未来一段时间内的系统行为进行预测,然后通过一个优化算法计算当前时刻的最优控制动作。
MPC的控制器与传统的PID控制器不同,它不仅仅根据当前系统状态进行控制,而是根据预测模型对未来的系统行为进行优化调整。
MPC的核心是系统模型。
对于一个要进行MPC控制的系统,需要建立一个准确的系统模型,该模型包括系统的动态方程以及输入和输出的关系。
系统模型可以基于物理原理、统计学方法或者机器学习等方式进行建立。
对于复杂的系统,模型的表示可能是非线性的,并且可能包含未知参数。
针对这种情况,可以使用非线性模型预测控制(NMPC)或者递归模型预测控制(RMPC)等方法。
MPC的控制周期可以根据具体的应用场景进行选择,例如在汽车控制中可以选择10ms的控制周期。
在每个控制周期内,MPC首先对当前状态进行估计,然后根据模型预测未来一段时间内的系统行为,并通过一个优化算法计算出当前时刻的最优控制动作。
最后,控制器将最优控制动作发送给执行机构,并等待下个控制周期的到来。
MPC的优点之一是可以对系统的限制条件进行灵活处理。
在优化算法中可以加入对输入和输出的限制条件,例如电流限制、速度限制等。
这可以确保系统在正常工作范围内进行控制,并且可以防止系统因超过限制条件而导致的事故或者损坏。
另一个优点是MPC可以考虑未来系统行为的不确定性。
通过对未来一段时间内的系统行为进行预测,MPC可以在控制过程中主动调整以应对不确定因素,例如外部干扰、传感器噪声等。
这使得MPC在不确定环境下更加鲁棒可靠。
MPC在许多领域都有广泛的应用。
在化工领域,MPC被用于优化生产过程中的控制策略,以提高生产效率和质量。
模型预测控制(MPC)预测控制预测控制或称为模型预测控制(MPC)是仅有的成功应用于工业控制中的先进控制方法之一。
各类预测控制算法都有一些共同的特点,归结起来有三个基本特征:(1)预测模型,(2)有限时域滚动优化,(3)反馈校正。
这三步一般由计算机程序在线连续执行。
预测控制是一种基于预测过程模型的控制算法,根据过程的历史信息判断将来的输入和输出。
它强调模型的函数而非模型的结构,因此,状态方程、传递函数甚至阶跃响应或脉冲响应都可作为预测模型。
预测模型能体现系统将来的行为,因此,设计者可以实验不同的控制律用计算机仿真观察系统输出结果。
预测控制是一种最优控制的算法,根据补偿函数或性能函数计算出将来的控制动作。
预测控制的优化过程不是一次离线完成的,是在有限的移动时间间隔内反复在线进行的。
移动的时间间隔称为有限时域,这是与传统的最优控制最大的区别,传统的最优控制是用一个性能函数来判断全局最优化。
对于动态特性变化和存在不确定因素的复杂系统无需在全局范围内判断最优化性能,因此这种滚动优化方法很适用于这样的复杂系统。
预测控制也是一种反馈控制的算法。
如果模型和过程匹配错误,或者是由于系统的不确定因素引起的控制性能问题,预测控制可以补偿误差或根据在线辨识校正模型参数。
虽然预测控制系统能控制各种复杂过程,但由于其本质原因,设计这样一个控制系统非常复杂,要有丰富的经验,这也是预测控制不能预期那样广泛得到应用的主要原因。
预测控制适用于先进过程控制(APC)和监督控制场合,其控制输出作用主要是跟踪设定值的变化。
但预测控制并不能很好地处理调节控制难题。
模型预测控制是一种基于模型的闭环优化控制策略,已在炼油、化工、冶金和电力等复杂工业过程控制中得到广泛的应用。
模型预测控制具有控制效果好、鲁棒性强等优点,可有效地克服过程的不确定性、非线性和关联性,并能方便处理过程被控变量和操纵变量中的各种约束。
预测控制算法种类较多,表现形式多种多样,但都可以用以下三条基本原理加以概括:①模型预测:预测控制的本质是在对过程的未来行为进行预测的基础上,对控制量加以优化,而预测是通过模型来完成的。