高精度航姿参考系统(AHRS)
- 格式:ppt
- 大小:4.14 MB
- 文档页数:23
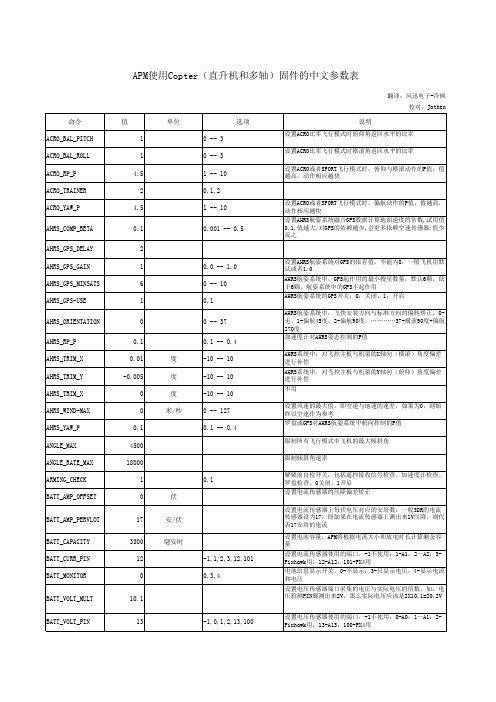
APM使用Copter(直升机和多轴)固件的中文参数表翻译:风迅电子-冷枫校对:Jothen 命令值单位选项说明ACRO_BAL_PITCH10 -- 3设置ACRO比率飞行模式时俯仰角返回水平的比率ACRO_BAL_ROLL10 -- 3设置ACRO比率飞行模式时横滚角返回水平的比率ACRO_RP_P 4.5 1 -- 10设置ACRO或者SPORT飞行模式时,俯仰与横滚动作的P值,值越高,动作相应越快ACRO_TRAINER20,1,2ACRO_YAW_P 4.5 1 -- 10设置ACRO或者SPORT飞行模式时,偏航动作的P值,值越高,动作相应越快AHRS_COMP_BETA0.10.001 -- 0.5设置AHRS航姿系统融合GPS数据计算地面速度的常数,试用值0.1,值越大,对GPS的依赖越少,会更多依赖空速传感器,值少反之AHRS_GPS_DELAY2AHRS_GPS_GAIN10.0 -- 1.0设置AHRS航姿系统对GPS的依存值,不能为0,一般飞机用默认或者1.0AHRS_GPS_MINSATS60 -- 10AHRS航姿系统中,GPS起作用的最小搜星数量,默认6颗,低于6颗,航姿系统中的GPS不起作用AHRS_GPS-USE10,1AHRS航姿系统的GPS开关,0:关闭,1;开启AHRS_ORIENTATION00 -- 37AHRS航姿系统中,飞快安装方向与标准方向的偏转矫正,0-无,1-偏航45度,2-偏航90度,…………37-横滚90度+偏航270度AHRS_RP_P0.10.1 -- 0.4加速度计对AHRS姿态控制的P值AHRS_TRIM_X0.01度-10 -- 10AHRS系统中,对飞控主板与机架的X轴向(横滚)角度偏差进行补偿AHRS_TRIM_Y-0.005度-10 -- 10AHRS系统中,对飞控主板与机架的Y轴向(俯仰)角度偏差进行补偿AHRS_TRIM_X0度-10 -- 10不用AHRS_WIND-MAX0米/秒0 -- 127设置风速的最大值,即空速与地速的速差,如果为0,则始终以空速作为参考AHRS_YAW_P0.10.1 -- 0.4罗盘或GPS对AHRS航姿系统中航向控制的P值ANGLE_MAX4500限制所有飞行模式中飞机的最大倾斜角ANGLE_RATE_MAX18000限制倾斜角速率ARMING_CHECK10,1解锁前自检开关,包括遥控接收信号检查、加速度计检查、罗盘检查。

二阶互补滤波姿态求解器的设计
南余荣;宛冬晴;潘帅;姚亚楠
【期刊名称】《浙江工业大学学报》
【年(卷),期】2017(045)004
【摘要】为了降低小型四旋翼姿态解算的成本和提高姿态输出精度,采用了低成本MPU-9250作为IMU,设计了一种二阶互补滤波姿态求解器.二阶互补滤波算法所产生的计算量不大并且对处理芯片的性能要求不高,从而达到降低成本的目的.通过实际测试,以成品AHRS100作为航姿参考系统,得出姿态角度动态误差在3°以内.实验结果表明:所设计的姿态求解器能较精确地解算出四旋翼的姿态角度,满足了小型四旋翼对输出姿态精度的要求.
【总页数】5页(P416-420)
【作者】南余荣;宛冬晴;潘帅;姚亚楠
【作者单位】浙江工业大学信息工程学院,浙江杭州 310023;浙江工业大学信息工程学院,浙江杭州 310023;浙江工业大学信息工程学院,浙江杭州 310023;浙江工业大学信息工程学院,浙江杭州 310023
【正文语种】中文
【中图分类】TP273
【相关文献】
1.一种二阶互补滤波与卡尔曼滤波的姿态解算方法设计 [J], 黄镇;张浩磊;刘梅;朱健
2.基于四元数二阶互补滤波的四旋翼姿态解算 [J], 伏家杰;周翟和;尹辉;陈燕
3.基于双级互补滤波的姿态测量算法设计 [J], 高宁; 李杰; 冯凯强; 许廷金; 高诗尧; 李炳臻
4.四旋翼飞行器互补滤波姿态求解器的设计 [J], 张萍
5.STM32控制器的姿态解算互补滤波器设计 [J], 贺文涛;杨睿;秦睿
因版权原因,仅展示原文概要,查看原文内容请购买。

Suge-Husa自适应滤波简化算法李果;刘旭焱;马建晓【摘要】为解决组合导航系统存在因量测数据跳变引起状态突变等问题,分析Suge-Husa自适应滤波算法,针对组合导航系统噪声稳定的特点提出基于最佳遗忘因子的Suge-Husa自适应滤波简化算法,为提高滤波器的跟踪性能,引入调整系数,设计惯性导航系统(INS)、航姿系统(AHRS)和GPS构成松组合导航模型,通过Suge-Husa自适应滤波器对导航参数进行误差估值,对输出误差进行实时修正.结合实验,对模型和算法进行了仿真分析,验证了模型的可行性和算法的有效性.【期刊名称】《计算机工程与设计》【年(卷),期】2019(040)005【总页数】5页(P1360-1364)【关键词】Suge-Husa自适应滤波;最佳遗忘因子;卡尔曼滤波;组合导航;简化算法【作者】李果;刘旭焱;马建晓【作者单位】南阳师范学院机电工程学院,河南南阳473061;南阳师范学院机电工程学院,河南南阳473061;南阳师范学院机电工程学院,河南南阳473061【正文语种】中文【中图分类】TP3910 引言惯性导航和GPS组合导航是目前常用的一种导航模型,两者取长补短,获得了很好的导航效果。
但是组合导航系统存在由量测数据跳变造成的状态突变的问题,从而造成系统输出参数误差较大,在数据跳变区无法准确地提供有效的导航数据。
近年来,提出了各种改进卡尔曼滤波算法改进组合导航系统存在的问题,例如基于自适应滤波的跟踪算法[1,2]处理GPS信号在信噪比中跟踪性能,基于平方根中心差分卡尔曼滤波(SR-CDKF)的直接式滤波估计方法[3]解决SINS/GPS组合导航系统姿态、速度和位置等导航参数的非线性估计问题,为解决线性化误差导致滤波发散的问题提出的高精度的仿真方法[4]等。
但这些算法较少涉及量测数据状态突变的问题。
在实际组合导航应用中,对数据跳变的抗干扰能力要求较高,这一问题关系到飞行安全。

一种动态环境下载体定姿方法马正华;姚华;戎海龙【摘要】针对载体线加速度存在的动态条件下,加速度计已不能完全描述重力场信息,提出最速下降法处理地磁与加速度计数据,来减小测量的误差,并引入无迹卡尔曼(UKF)滤波融合陀螺仪信息,抑制微机械陀螺仪漂移,加入飞行状态判别条件一定程度上规避加速度计动态测量精度差的问题.实验结果表明,算法有效地融合了陀螺仪较好的动态性能以及加速度计与地磁的静态性能,避免了由于线加速度存在,姿态解算产生的误差,改善了系统的整体性能.【期刊名称】《计算机应用与软件》【年(卷),期】2015(032)012【总页数】4页(P22-24,63)【关键词】动态;低成本;SUAV;最速下降法;UKF【作者】马正华;姚华;戎海龙【作者单位】常州大学信息科学与工程学院江苏常州213164;常州大学信息科学与工程学院江苏常州213164;常州大学信息科学与工程学院江苏常州213164【正文语种】中文【中图分类】TP393.08随着导航技术的发展,如何提高载体导航精度有着重要的意义,而载体姿态解算又是影响导航精度水平的关键。
常用的导航方法有惯性导航、卫星导航、视觉导航等。
惯性导航由于不需要依赖外界信息,能全自主地完成导航,受到了迅速发展[1]。
由MEMS陀螺仪、加速度计、微磁强计组成的姿态航向参考系统(AHRS)具有体积小、重量轻,功耗低等优点,已被广泛应用于低成本导航系统[2]。
事实上,单独的陀螺仪已经能够提供姿态信息,但由于其含有较高的时变误差和测量噪声,角速度经积分后的累计误差将迅速发散,很难长时间独立工作,它只具有较高的短期动态精度。
加速度计与磁强计组合可以提供无漂移的姿态信息,具有很好的静态性能,然而动态情况下易受载体线加速度影响。
因此,选择一种简单高效的滤波算法,取长补短融合传感器信息获得高精度的姿态信息显得非常必要。
目前常用的滤波方法有扩展卡尔曼滤波(EKF)。
文献[3]使用EKF进行数据融合,达到了一定的滤波精度,但并未考虑动态环境下线加速的存在会大大降低加速度计测量精度,进而降低了融合效果。
Mini-Avatar用户使用说明书重庆冰刃科技有限公司(淘宝店:/)1 概述Mini-Avatar(简化版)为一款微型航姿参考模块,提供9自由度的传感器信息(3轴加速度+3轴陀螺仪+3轴磁场计),该模块还实时的提供经卡曼滤波优化的静态和动态姿态信息。
模块3.3V供电,典型工作电流40mA,更适合要求低功耗的应用场合,比如采用电池供电的手持测试设备,飞行控制,玩具等。
模块整体大小24mm*24mm*3mm,输出孔采用传统的2.54mm间距设计,4个方向的加强型半孔工艺设计,可以更灵活的方便客户安装调试。
2 性能参数方向量程360 度, 任意轴传感器量程陀螺: +/-500 deg/s;加速度: +/- 2 G ; 磁场: +/-1.3 Gauss精度静态精度:横滚,俯仰0.1度,方位1度(无磁环境)动态精度:1度。
输出格式欧拉角(Pitch, Roll, Yaw);传感器独立数据;数字输出TTL串口带宽100 Hz;串口数据速率115200 Kb(如需其他波特率,请提前说明)供应电压DC 3.3V供应电流<40 mA操作温度-40 to +70 ℃尺寸24x 24 x 3 (mm x mm x mm)重量 2.5g* 只提供简单的标定,尤其是磁场环境客户可以根据说明自行标定* 固件版本有3种:陀螺仪量程500°/s ;陀螺仪量程2000°/s ;默认提供为:陀螺仪量程500°/s的9轴固件如有特殊需要,请提前联系。
3 接口说明PIN 名称功能描述1 GND 地2 GND 地3 NRST 系统复位4 VCC 3.3V供电5 WKUP Stm32唤醒功能6 TX2 Stm32串口27 RX2 Stm32串口28 GND 地9 GND 地10 NC 未用11 NC 未用12 GND 地13 NC 未用14 NC 未用15 NC 未用16 GND 地17 GND 地18 VCC 3.3V供电19 PA8 Stm32之PA820 TX1 Stm32串口121 RX1 Stm32串口122 PA11 Stm32之PA1123 PA12 Stm32之PA1224 VCC 3.3V供电25 GND 地26 RES 保留27 RES 保留28 RES 保留29 RES 保留30 RES 保留31 BOOT0 Stm32之Boot0(需接电阻下拉)32 VCC 3.3V供电注:STM32的IO功能未开放模块推荐应用电路:4 使用说明4.1 坐标系定义系统的坐标系定义如图1所示,X轴指向载体的前方,Y轴指向载体的右方,Z轴指向载体的下方。

二阶互补滤波姿态求解器的设计南余荣;宛冬晴;潘帅;姚亚楠【摘要】为了降低小型四旋翼姿态解算的成本和提高姿态输出精度,采用了低成本MPU-9250作为IMU,设计了一种二阶互补滤波姿态求解器.二阶互补滤波算法所产生的计算量不大并且对处理芯片的性能要求不高,从而达到降低成本的目的.通过实际测试,以成品AHRS100作为航姿参考系统,得出姿态角度动态误差在3°以内.实验结果表明:所设计的姿态求解器能较精确地解算出四旋翼的姿态角度,满足了小型四旋翼对输出姿态精度的要求.%A second order complementary filter solver is designed in order to reduce the cost and improve the output precision of small quad-rotors in attitude calculation process.The Low-cost MPU-9250 is adopted as IMU in this paper.The second-order complementary filtering algorithm produces little computation and the performance requirement of the processing chip isn`t high.It will achieve the purpose of reducing cost.Through the practical test, using AHRS100 as attitude reference system, and the dynamic error of the attitude angl e is less than 3°.The experimental result show that the solver designed in this paper can calculate the attitude angle fairly accurately and meet the requirement of output precision of small quad-rotors.【期刊名称】《浙江工业大学学报》【年(卷),期】2017(045)004【总页数】5页(P416-420)【关键词】四旋翼;二阶互补滤波;姿态角度【作者】南余荣;宛冬晴;潘帅;姚亚楠【作者单位】浙江工业大学信息工程学院,浙江杭州 310023;浙江工业大学信息工程学院,浙江杭州 310023;浙江工业大学信息工程学院,浙江杭州 310023;浙江工业大学信息工程学院,浙江杭州 310023【正文语种】中文【中图分类】TP273随着科技的进步和时代的发展,无人机凭借自身特有的优势,在民用军事和农业中得到了广泛的应用[1],例如可以用无人机进行航拍摄影,电力巡检,新闻报告,喷洒农药,侦查敌情,还可以用无人机来送快递,在这些方面无人机有着人工所不具备的特有优势,无人机成为当下科技行业研究的热点.一直以来,在诸多研究问题中,飞行器的姿态解算问题都是研究的重点[2-3].在小型四旋翼姿态解算中一般采用低成本捷联惯性导航测量单元,主要由陀螺仪,磁力计和加速度计组成,陀螺仪具有很好的动态跟踪特性[4-5],在飞行器飞行过程中测得的角速度会比较准确,实际上单独用陀螺仪也能解算出四旋翼的姿态,但是由陀螺仪测量得到的积分角度会产生误差的累积,如果不加以补偿,长时间可能引起严重的偏差,所以笔者利用加速度计和磁力计对陀螺仪解算的角度进行误差补偿[6-7].计算四旋翼在三维空间的旋转有很多种等价的表示方法,常见的有方向余弦、四元数和欧拉角[8].欧拉角虽然简单易于表示和理解,但是由于其自身的姿态表示特点导致万向节死锁,不能全方位地解算出四旋翼的姿态方位,方向余弦法虽然能满足四旋翼全方位姿态解算的要求,但是需要的运算量太大[9-10],在采用低成本处理芯片的平台中,导致姿态不能实时输出.故笔者采用四元数来表示姿态变化,四元数有一些其他角位移表示方法所没有的优点如平滑插值,能和矩阵形式快速转换等[11-12].融合加速度计,陀螺仪和磁力计测得数据的方法有一阶互补滤波,二阶互补滤波和扩展卡尔曼滤波等[13],扩展卡尔曼算法虽然比较先进,解算出来的角度能很好地跟踪飞行器真实的角度,但其设计复杂,计算量大,在小型四旋翼中普遍使用的低成本惯性测量单元不满足其对IMU性能的要求[14].一阶互补滤波算法虽然设计简单,易于调试,只需调节一个参数,但解算精确度差.故笔者采用了二阶互补滤波算法,以STM32F103C8T6为CPU,IMU采用MPU-9250,这两个模块累计成本在30元左右,而卡尔曼滤波算法采用的CPU和IMU模块累计成本普遍在80~120元之间,加入PI环节补偿单独用陀螺仪测量所产生的误差,通过调节两个参数KP和Ki最终解算出了较精确的姿态[15-16],满足了小型低成本四旋翼飞行器求解姿态过程中对成本和精度的综合要求.对四旋翼进行姿态解算前首先要建立导航坐标系n系和机体坐标系b系,建立的导航坐标系坐标原点位于四旋翼的质心,xn轴指向北,yn指向东,zn指向地即东北地坐标系,三条轴之间都是俩俩垂直的,同理建立四旋翼的机体坐标系,机体坐标系和四旋翼固联,随着四旋翼的旋转而旋转,坐标系如图1所示.绕机体坐标系三条轴的任意旋转序列都可以确定四旋翼的方位,设横滚角α,俯仰角β,偏航角γ分别为绕xb轴,yb轴,zb轴旋转得到的角度值,一组角度值一共可表示12种不同的旋转方式.欧拉角与方向余弦矩阵之间的关系为四元数是一种高阶复数,能很方便地刻画飞行器绕任意轴的旋转,且计算量小.四元数q的表达式为其中四元数q和方向余弦矩阵之间的关系式为陀螺仪动态响应好,积分后可测倾角,但在解算姿态的过程中,会产生累积误差和零漂等,在低频段信号不好.磁力计和加速度在低频段表现优秀,但是瞬时特性很差,当四旋翼姿态剧烈变化时,不能满足四旋翼实时解算的要求.因此可以结合它们分别在高频段和低频段的优势,利用互补滤波原理对陀螺仪测得的姿态角度进行高通滤波,对磁力计和加速度计测得的姿态角度进行低通滤波,得到在高频段和低频段都较好的信号,滤波原理如图2所示.由图(2)可以进一步得到二阶互补滤波公式为式中:GH(s)=s2/(s2+Kps+Ki)为二阶高通滤波器;GL(s)=Kps+Ki/(s2+Kps+Ki)为二阶低通滤波器,GL(s)+GH(s)=1;wg为陀螺仪测量的角速度;为最终得到的姿态角度值;θa为将磁力计和加速度计测量值进行处理得到的角度值.选择适当的KP,Ki,利用式(4)即可得到较为精确的姿态数据.在解算过程中,传感器测得的原始数据是姿态角,因此先将姿态角转换为四元数,然后利用四元数进行姿态更新,最后还是要将四元数转换为姿态角.可求出四旋翼在初始时候的四元数,即在载体坐标系下,设加速度计测得的值为ab,磁力计测得的值为mb,将加速度和磁力计测得的值做归一化处理,方向不变,分别得到b和b,可将n系下的重力向量转到b系下,即总的误差向量e为式中:e1为加速度计测得的单位向量与从四元数那里获得的重力向量之间的误差向量;e2为磁力计测得的单位向量与从四元数那里得到的单位向量之间的误差向量.令δ=(Kp+Ki/s)·e,陀螺仪测得的角速度为wg,将δ与wg进行叠加得到修正后的角速度w,最后来更新四元数,得式中w=0+wxi+wyj+wzk,由式(8)可以得到四元数的迭代方程式为由式(9)可知:只需传入角速度在三个轴的分量和周期T即可求得下一周期的四元数值,将求得的四元数进行单位化,得到最终表示四旋翼姿态的欧拉角为详细的姿态解算过程,如图3所示.3.1 实验平台我们选用STM32F103C8T6为CPU,IMU采用MPU-9250,MPU-9250是一个QFN封装的复合芯片,它由两部分组成,一组是3轴加速度计和3轴陀螺仪,另一组则是AKM公司的AK896 3轴磁力计.采用AHRS100成品航姿系统作为参考系统进行对比,AHRS100在各种恶劣条件下均能精确解算出四旋翼的姿态.3.2 测试结果和分析将一阶互补滤波算法和二阶互补滤波算法的廉价IMU单元与AHRS100固定在四旋翼上并在实际场景下飞行,通过计算机串口同时读取3个测量单元的数据进行实时姿态解算,采样时间为60 s,以AHRS100成品航姿系统测得的姿态数据为参考标准进行MATLAB绘图.图4为一阶互补滤波姿态求解器、二阶互补滤波姿态求解器和参考航姿系统所测得的俯仰角输出对比情况,进一步利用MATLAB内置的计算工具,求出俯仰角误差,如图5所示,可以很明显看到大部分时间里一阶解算角度误差都是大于二阶解算角度误差,二阶解算角度误差第4 s和第6 s左右达到最大,接近2°.而一阶解算角度最大误差在第25 s达到了3.2°.图6为测得的横滚角输出对比情况,进一步绘制出横滚角误差(图7),可以很明显看到大部分时间里一阶解算角度误差都是大于二阶解算角度误差.在几个特殊的时间点由于飞行器姿态变化剧烈导致姿态求解角度和真实角度偏差较大,在第18 s左右二阶解算角度误差达到最大,达到2.3°.而一阶解算角度最大误差在第39 s左右达到了4.3°.图8为测得的偏航角输出对比情况,进一步绘制出偏航角误差,如图9所示,可以很明显看到大部分时间里一阶解算角度误差都是大于二阶解算角度误差.二阶解算角度误差大多在1.5°以内.而一阶解算角度误差在很多时刻都超过了1.5°,解算精度明显低于二阶解算精度.可以得到四旋翼在飞行过程中,无论是俯仰角,横滚角还是偏航角,一阶解算的精确度都是明显低于二阶解算的精确度.大多数时间内二阶解算俯仰角误差,横滚角误差和偏航角误差分别控制在2°,1.5°,1.5°以内,姿态角最大动态误差小于2.5°,满足小型低成本四旋翼飞行器对输出姿态精度的要求.针对小型四旋翼姿态解算这一问题进行了详细的分析,通过对比一阶互补滤波算法,卡尔曼滤波算法,二阶互补滤波算法最后设计了一种基于四元数的二阶互补滤波姿态求解器,并对解算的原理和流程做了详细介绍.以四旋翼飞行器为实验平台,通过实际飞行测试,对比二阶互补滤波姿态求解器和一阶互补滤波姿态求解器解算出的角度误差,得出了二阶解算精度明显高于一阶解算精度的结论,验证了笔者所设计的二阶互补滤波算法在提升输出姿态精度上的有效性.【相关文献】[1] 郭晓鸿,杨忠,陈喆,等.EKF和互补滤波在飞行姿态确定中的应用[J].传感器与微系统,2011,30(11):56-58.[2] 王立波.捷联惯导系统设计与数据处理技术研究[M].北京:科学出版社,2006.[3] 史智宁,韩波,徐玉,等.基于重力场自适应互补滤波的无人直升机水平姿态估计方法[J].传感技术学报,2009,22(7):993-996.[4] 方路平,高坤,潘清,等.基于陀螺仪的穿刺手术导航系统设计[J].浙江工业大学学报,2016,44(2):129-133.[5] 王宇,董辉,徐建明,等.一种新的智能小车控制策略[J].浙江工业大学学报,2012,40(2):217-221.[6] 胥芳,倪紫京,占红武.自平衡小车的模型分析与数据处理[J].浙江工业大学学报,2016,44(3):288-291.[7] 张荣辉,贾宏光,陈涛,等.基于四元数法的捷联惯性导航系统的姿态解算[J].光学精密工程.2008,16(10):1963-1970.[8] 张承岫,李铁鹰,王耀力.基于MPU6050和互补滤波的四旋翼飞控系统设计[J].传感技术学报,2016,29(7):1011-1015.[9] 蔡磊,牛小骥,张提升,等.MEMS惯导在四旋翼飞行器中导航性能的实验分析[J].传感技术学报,2016,29(5):711-715.[10] 彭孝东,张铁民,李继宇,等.基于传感器校正与融合的农用小型无人机姿态估计算法[J].自动化学报,2015,41(4):854-860.[11] 王延东,贾宏光.组合导航系统滤波器截断误差抑制方法[J].传感技术学报,2014,27(5):616-621.[12] 郑君里,杨为理,应启珩.信号与系统[M].北京:高等教育出版社,2000.[13] 文常保,高丽红,方吉善,等.基于改进型限幅平均滤波法的高精度称重系统研究[J].传感技术学报,2014,27(5):649-653.[14] 张洪涛.四旋翼微型飞行器位姿及控制策略的研究[D].哈尔滨:哈尔滨工业大学,2014.[15] 傅忠云,刘文波,孙金秋,等.自适应混合滤波算法在微型飞行器姿态估计中的应用[J].传感技术学报,2014,27(5):698-703.[16] 彭孝东,张铁民,李继宇,等.基于传感器校正与融合的农用小型无人机姿态估计算法[J].自动化学报,2015,41(4):854-860.。
哈尔滨工业大学工程硕士学位论文摘要随着2019年蓝牙5.1版本的正式发布,寻向功能被添加到标准当中,可帮助设备明确蓝牙信号的方向,有望实现亚米级甚至厘米级位置精度的蓝牙定位系统。
本文采用寻向技术中的到达角技术,基于Texas Instruments公司的CC2640R2F芯片及天线阵列进行蓝牙定位系统设计与研究分析。
首先,给出基于TOF的距离测量方法,通过过采样方式提高蓝牙TOF距离测量精度。
给出基于相位干涉仪原理的AOA角度测量方法,并通过微分方程详细分析了影响AOA精度的几大原因,包括相位测量精度,来波方向以及天线阵列阵元间距与载波波长比值。
提出误差分布函数建立方法,针对复杂定位算法,提出相应误差分布图谱绘制方法,可根据误差图谱拟合出误差分布函数关系式。
其次,在航姿参考系统数据处理与融合部分,分别建立了四元数及欧拉角表示的旋转矩阵,推导了加速度计、磁力计姿态测量关系式,根据该关系式以及两种旋转矩阵表达式对应关系,给出了四元数初始化公式。
设计了基于传统Mahony互补滤波以及二阶自适应EKF的姿态估计算法,通过仿真及实验验证了算法效果并进行了对比。
然后,在蓝牙定位算法部分,设计了仅依赖定位信息的加权最小二乘以及EKF 位置估计算法。
为了尽可能兼顾平滑与滞后问题,建立了基于蓝牙/AHRS的组合导航模型,并进行了相应仿真实验,仿真结果表明,组合导航可有效提升定位精度且降低常规跟踪滤波带来的延迟影响,同时还可额外估计出地磁坐标系与导航坐标系之间的夹角,可省去新系统布置后的坐标系夹角标定工作。
最后,搭建了实验平台,开发了一套基于通用协议框架的上位机数据可视化软件。
实现了基于两基站AOA三角定位方式的实际定位系统,并以UWB定位数据为参考,计算得到蓝牙定位精度达0.613m,相比传统蓝牙定位精度有着较大的提升。
组合导航实验结果表明,蓝牙/AHRS组合导航效果取决于加速度测量精度,而低成本MEMS由于低敏感度以及严重漂移问题,尤其在姿态存在随意性的情况下很难满足需求。
20世纪70年代,伴随着光纤通信技术的发展,光纤传感技术也迅速发展起来。
该技术是以光波为载体,光纤为媒质,感应和传输外界被测量信号的新型传感技术,以独特的优良性能赢得极大的重视,并在各个领域中广泛应用。
光纤陀螺技术是光纤传感技术的一个特例,是利用光学传输特性而非转动部件来感应角速率和角偏差的惯性传感技术。
1 光纤陀螺的结构按照元器件类型,光纤陀螺分为分立元件型、集成光学型和全光纤型。
由于分立元件型光纤陀螺存在体积较大、可靠性较差、误差较大等缺点,现在世界各国都已停止发展。
集成光学型光纤陀螺将主要光学元件如耦合器、偏振器、调制器都集成在一块芯片上,将光纤线圈、光源、检测器接在芯片适当的位置,就构成了实用的集成光学型光纤陀螺。
从光纤陀螺的发展方向来看,集成光学型光纤陀螺是最有发展前途的光纤陀螺形式。
全光纤陀螺是将主要的光学元件都加工在一条保偏光纤上,从而可以避免因元器件连接造成的误差。
目前,全光纤陀螺技术比较成熟,其性能在三种中最好,适合在现阶段研制实用的商品光纤陀螺。
根据干涉型光纤陀螺的信号检测方式的不同,可以分为开环式和闭环式两大类。
开环式光纤陀螺直接检测干涉条纹的相移,因而动态范围较窄,检测精度较低。
闭环式系统采取相位补偿的方法,实时抵消萨格奈克相移,使陀螺始终工作在零相移状态,通过检测补偿相位移来测量角速度,其动态范围大,检测精度高。
此外,闭环式光纤陀螺对环境尤其是对振动不敏感,是研制高精度光纤陀螺仪的理想形式。
开环式全光纤陀螺是中低精度、低成本光纤陀螺中比较流行的结构。
目前,在中高精度光纤陀螺仪领域,最为流行的设计结构为全数字闭环式光纤陀螺仪。
光纤陀螺示意图2 光纤陀螺的特点光纤陀螺的主要特点是:①无运动部件,仪器牢固稳定,耐冲击且对加速度不敏感;②结构简单,零部件少,价格低廉;③启动时间短(原理上可瞬间启动);④检测灵敏度和分辨率极高;⑤可直接用数字输出并与计算机接口联网;⑥动态范围极宽;⑦寿命长,信号稳定可靠;⑧易于采用集成光路技术;⑨克服了因激光陀螺闭锁现象带来的负效应;⑩可与环形激光陀螺一起集成捷联式惯性系统传感器。
基于RFID和IMU技术的室内定位方法研究与应用蔡章林(泛亚汽车技术中心有限公司,上海201208)邓青青(上汽通用有限公司广德分公司,广德242227)[摘要】针对在室内停车场等GPS信号较差的工况,行驶车辆无法实时获取准确定位的问题,文章结合 RFID和IMU两种定位技术,使用卡尔曼滤波器耦合该两组定位系统信号,并将该方法应用在某款车型上,结果表明在室内停车场能够获得实时准确的位置信息。
[Abstract]In view of the poor GPS signal in the place like indoor parking lot,the moving vehicle cannot get accurate positioning in real time.In this paper,the two sets of positioning system signals are coupled by Kalman filter combined with RFID and IMU,and the method is applied to a certain vehicle. The results show that the real-time accurate location information can be obtained in the indoor parking lot.【关键词】GPS信号RFID IMU卡尔曼滤波doi:10.3969/j.issn.1007-4554.2021.04.050引言随着智能网联和人工智能技术的不断进步,对于室内密闭环境等GPS信号较差的定位需求在逐步提高,诸如:室内停车场、大型的车站停车场和机场停车场等场合。
如果在这些室内场所可以实时准确地定位,一方面可以为车主提供准确的位置信息,从而可以快速寻找到车辆;另一方面将会大大提高这类场所的安全性,为紧急事故节省搜救时间。