基于SIMULINK的永磁无刷直流电动机及控制系统的建模与仿真
- 格式:pdf
- 大小:162.13 KB
- 文档页数:4
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
永磁同步电动机矢量控制调速系统建模与仿真第1章引言随着电动机在社会生产中的广泛应用,电机研究成为必不可少的研究课题。
电动机是生产和生活中最常见的设备之一,电动机一般分为直流电动机和交流电动机两大类。
交流电动机的诞生已经有一百多年的历史。
交流电动机又分为同步电动机和感应(异步)电动机两大类。
直流电动机的转速容易控制和调节,在额定转速以下,保持励磁电流恒定,通过改变电枢电压的方法实现恒转矩调速;在额定转速以上,保持电枢电压恒定,可用改变励磁的方法实现恒功率调速。
20世纪80年代以前,在变速传动领域,直流调速一直占据主导电位。
随着交流调速技术的发展使交流电机的应用更加广泛,但是其转矩控制性能却不如直流电机。
因此如何使交流电机的静态控制性能与直流系统相媲美,一直是交流电机的研究方向。
1971年,由F.Blaschke提出的矢量控制理论第一次使交流电机控制理论获得了质的飞跃。
矢量控制采用了矢量变换的方法,通过把交流电机的磁通与转矩的控制解耦使交流电机的控制类似于直流电动机。
矢量控制方法在实现过程中需要复杂的坐标变换,而且对电机的参数依赖性较大。
矢量控制的基本思想是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使得两个分量互相垂直,彼此独立,然后分别进行调节。
这样交流电动机的转矩控制,从原理和特性上就和直流电动机相似了。
永磁同步电机(PMSM)采用高能永磁体为转子,具有低惯性、快响应、高功率密度、低损耗、高效率等优点,成为了高精度、微进给伺服系统的最佳执行机构之一。
永磁同步电机构成的永磁交流伺服系统已经向数字化方向发展,因此如何建立有效的仿真模型具有十分重要的意义。
对于在Simulink中进行永磁同步电机(PMSM)建模仿真方法的研究已经受到广泛关注。
第2章 电压空间矢量技术的基本原理PWM 控制技术是利用半导体开关器件的导通与关断把直流电压变成电压脉冲序列,并通过控制电压脉冲宽度或周期以达到变频、调压及减少谐波含量的一种控制技术。
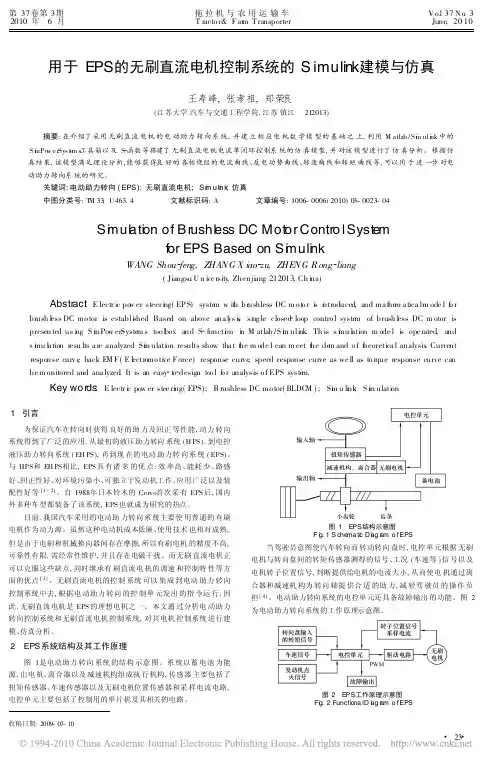
用于EPS 的无刷直流电机控制系统的S imulink 建模与仿真王寿峰,张孝祖,郑荣良(江苏大学汽车与交通工程学院,江苏镇江 212013)摘要:在介绍了采用无刷直流电机的电动助力转向系统,并建立相应电机数学模型的基础之上,利用M atlab /S i m uli nk 中的S i m Po w erSys t e m s 工具箱以及S 函数等搭建了无刷直流电机电流单闭环控制系统的仿真模型,并对该模型进行了仿真分析。
根据仿真结果,该模型满足理论分析,能够获得良好的各相绕组的电流曲线、反电动势曲线、转速曲线和转矩曲线等,可以用于进一步对电动助力转向系统的研究。
关键词:电动助力转向(EPS);无刷直流电机;Sm i uli n k ;仿真中图分类号:T M 33;U463.4 文献标识码:A 文章编号:1006-0006(2010)03-0023-04S m i ul a ti o n of B rushl e ss DC Mot or Contro l Syst e mf or EPS Based on S m i uli n kWANG Shou feng,Z HANG X iao zu,Z HE NG R ong liang(Jiangsu U n i ve rsity ,Zhenji ang 212013,Ch i na)Abstr ac:t E lectr ic po w er steer i ng(EP S)syste m w it h brushless DC m o t o r i s i ntroduced ,and ma t he m a tica lm ode l f o rbrush l ess DC mo tor is establi shed .Based on above ana l ys i s ,si ng le closed loop contro l syste m of brush l ess DC m otor is presen ted us i ng S i m Pow erSyste m s too l box and S functi on i n M atlab /S i m uli nk .Th is s i m u l ation m ode l i s ope rated ,and s i m u l a tion resu lts a re analyzed .Si m ulati on results show tha t t he m ode l can m eet t he de m and o f t heoretica l analysis .Current response curv e ,back E M F (E l ectromo ti ve F orce)response curve ,speed response curve as we ll as to rque response curve can be m onitored and ana lyzed .It is an easy t o design too l f o r analysis o f EPS syste m.Key wor ds :E lectr i c pow er stee ri ng(EPS);B rushless DC mo tor(BLDC M );Si m u li nk ;S i m ulati on1 引言为保证汽车在转向时获得良好的助力及回正等性能,动力转向系统得到了广泛的应用,从最初的液压助力转向系统(H PS ),到电控液压助力转向系统(EH PS ),再到现在的电动助力转向系统(EPS)。
永磁直流电动机的Simulink建模仿真教学打开文本图片集【摘要】“电机及其系统的计算机仿真”是电气工程及其自动化专业的一门重要课程,根据电机的基本结构建立数学模型并构建仿真模型是一种基本功训练。
本文选择最简单的电机—永磁直流电动机作为研究对象,根据他的等效电路建立瞬态数学模型,利用MATLAB软件中的动态仿真工具Simulink模块库中的功能模块,构建其仿真模型。
给出了永磁直流电动机最基本的五种仿真模型。
通过实例仿真计算,验证了建模方法的正确性和有效性。
【关键词】永磁直流电动机;数学模型;仿真模型;MATLAB/ Simulink 【Abstract】“Electrical machinery and system’s computer simulation”is a professional electrical engineering and automation of an important subject,according to the basic structure of the motor establishment of mathematical model and simulation model is a basic skills training. In this paper,the selection of the most simple motor - permanent magnet DC motor for the study,according to his equivalent circuit establishment of the transient mathematical model,using dynamic library module simulation tool Simulink functional modules in MATLAB software,to build the simulation model. Permanent magnet DC motor is given five basic simulation model. Through the example simulation computation,has confirmed the modelling method accuracy and the validity.【Key words】PMDC motor;Mathematical model;Simulation model;MATLAB/Simulink0 引言“电机及其系统的计算机仿真”是电气工程及其自动化专业的一门重要课程,掌握这门课程的基本内容对相当一部分学生顺利完成毕业设计论文是非常有帮助的。
无刷直流电机的建模与仿真摘要:该文在分析无刷直流电机(bldcm)数学模型和工作原理的基础上,利用matlab软件的simulink和psb模块,搭建无刷直流电机及整个控制系统的仿真模型。
该bldcm控制系统的构建采用双闭环控制方法,其中的电流环采用滞环电流跟踪pwm,速度环采用pi控制。
仿真和试验分析结果证明了本文所采用方法的有效性,同时也证明了验证其他电机控制算法合理性的适用性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:bldcm控制系统;无刷直流电机;数学模型;matlab;电流滞环中图分类号: tp391 文献标识码:a 文章编号:1009-3044(2013)05-1172-03随着现代科技的不断发展,无刷直流电动机应用技术越发成熟,应用领域也越发广泛,用户对无刷直流电动机使用增多的同时,对其控制系统的设计要求也变得越来越高。
包括低廉的设计和搭建成本、短的开发周期、合适的控制算法、优良的控制性能等。
而科学合理的无刷直流电动机控制系统仿真模型的建立,对控制系统的直观分析、具体设计,快速检验控制算法,降低直流电机控制系统的设计成本,拥有十分重要的意义。
直流无刷电动机利用电子换向原理和高磁性材料,取代了传统的机械换相器和机械电刷,解决了有刷直流电动机换向器可维护性差和较差的可靠性的致命缺点,使得直流电动机的良好控制性能得到维持,直流电动机得到更好的应用。
伴随着如今功率集成电路技术和微电子技术的发展,控制领域相继出现了大量无刷直流电动机专用驱动和控制芯片,解决高性能无刷电动机驱动控制问题所提出的解决方案也变得更加丰富和科学,无刷直流电机在控制领域显示出前所未有的广阔应用前景[1]。
通过无刷直流电动机控制系统的仿真模型来检验各种控制算法,优化整个控制系统的方法,可以在短时间内得到能够达到预期效果的控制系统。
在对无刷直流电机电流滞环控制和数学模型等分析的基础之上,可以利用simulink中所提供的各种模块,构建出bldcm 控制系统的仿真模型,从而实现只利用simulink中的模块建立bldcm控制系统仿真模型。
基于simulink的永磁同步电机调速仿真【摘要】建立了永磁同步电机的数学模型,采用空间矢量脉宽调制算法,在simulink软件环境下构建了永磁同步电机矢量控制系统的仿真模型,实验表明基于转子磁场定向的矢量控制系统动静态性能较好。
【关键词】svpwm;PID控制;永磁同步电机1.引言随着新型永磁材料的广泛研究和应用和伺服控制技术的极大发展。
永磁同步电机(permanentmagnet synchronous motor,PMSM)具有功率密度大、转子损耗小、效率高等优点,已成为现代伺服系统的主流[1]。
矢量控制理论从根本上解决了交流电动机转矩的控制问题,具有电压利用率高、开关损耗小、电动机转矩波动小等特点。
因此,空间矢量脉宽调制技术(Space Vector Pulse Width Modulation,SVPWM)做为一种高性能的控制策略被广泛推广。
本文建立了PMSM的数学模型,同时借助matlab强大的仿真能力,构建了同步电机的矢量控制系统模型,并通过仿真进行验证。
2.PMSM的数学建模为了便于分析PMSM的数学模型及电磁转矩等特性。
假定:(1)磁饱和效应、涡流和磁滞损耗不计;(2)忽略齿槽、换相过程和电枢反应等的影响;(3)电机电流为对称的三相正弦波电流;(4)电枢绕组在定子内表面均匀连续分布;(5)忽略温度对电机的影响;(6)驱动二极管和续流二极管为理想元件[2]。
在上述假设的基础上,运用坐标变换理论便可得到dq0轴下PMSM的数学模型。
电压方程:(1)磁链方程:(2)转矩方程:(3)式中,、为d、q轴电压,、为d、q轴电流,、为d、q轴电感,为定子相电阻,为转子电角速度,为永磁体基波励磁磁场链过定子绕组的磁链,为微分算子,为极对数。
3.电压空间矢量脉宽调制原理电机输入三相正弦电压的最终目的是在空间产生圆形旋转磁场,从而产生恒定的电磁转矩。
直接针对这个目标,把逆变器和异步电机视为一体,按照跟踪圆形旋转磁场来控制PWM电压,这样的控制方法称为“磁链跟踪控制”,磁链的轨迹是靠电压空间矢量相加得到的,所以又称“电压空间矢量PWM控制”[3]。

收稿日期:2003-07-143基金项目:教育部科学技术研究重点项目(03131);广州市科技计划项目(2002J1-C0041) 作者简介:谢运祥(1965-),男,教授,主要从事电力电子与电力传动研究.E2mail:drxyx@ 文章编号:1000-565X(2004)01-0019-05基于MA TLAB/Simulink的永磁同步电机直接转矩控制仿真建模3谢运祥 卢柱强(华南理工大学电力学院,广东广州510640)摘 要:介绍了永磁同步电机直接转矩控制系统各个环节的MA TLAB/Simulink建模方法,并对系统进行仿真,研究了系统的性能以及PI控制器参数对系统性能的影响,同时比较了不同转矩滞环环宽的转矩脉动情形.结果表明,该系统具有良好的转速、转矩响应.随着转矩滞环环宽的变小,转矩的脉动幅度也随之减小.PI控制器参数中,随着比例系数K p的增大,系统动态响应加快,积分系数K i则主要影响系统的稳态误差,两者必须协调才能使系统达到较好的性能.关键词:同步电机;直接转矩控制;仿真;MA TLAB/Simulink建模中图分类号:TM92 文献标识码:A 直接转矩控制(Direct Torque Control,简称D TC)是继矢量控制技术之后的一种新方法.它采取定子磁链定向,利用离散的两点式(Band2Band)进行调节,并直接对电机的磁链和转矩进行控制,使电机转矩响应迅速[1],人们最先将此方法应用于感应电机控制中.随着电机技术的迅速发展,永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)已获得越来越广泛的应用,将D TC控制策略应用于永磁同步电机控制中,以提高电机的快速转矩响应,成为研究者关注的课题[2,3].由于电机转矩和磁链的计算对控制系统性能影响较大,为了获得满意的转矩计算,仿真研究是最有效的工具和手段.本文中利用MA TLAB软件下的Simulink仿真工具对PMSM D TC系统进行仿真;同时还详细地介绍了D TC系统中各控制计算单元的模型的建立,并分析控制系统的性能.1 永磁同步电机的直接转矩控制1.1 永磁同步电机的数学模型假设PMSM具有正弦波反电势,磁路线性且不考虑磁路饱和,忽略电机中的涡流损耗和磁滞损耗,可得到PMSM在转子同步旋转坐标系d—q轴系下的数学模型为ψd=L d i d+ψf(1)ψq=L q i q(2) u d=R s i d+pψd-ωrψq(3)u q=R s i q+pψq+ωrψd(4)T e=32n p(ψd i q-ψq i d)(5) T e-T m=Jdωrd t+Bωr(6)式中:ψd、ψq为定子磁链d、q轴分量;L d、L q为定子绕组d、q轴等效电感;i d、i q为定子电流d、q轴分量;u d、u q为定子电压d、q轴分量;ψf为转子磁链;R s为定子绕组电阻;p为微分算子;ωr为转子机械角速度;T e为电磁转矩;n p为电机极对数;T m 为负载转矩;J为电机转动惯量;B为粘滞系数. 1.2 直接转矩控制系统直接转矩控制的结构原理如图1所示,它由逆华南理工大学学报(自然科学版)第32卷第1期Journal of South China University of Technology Vol.32 No.1 2004年1月(Natural Science Edition)January 2004变器、PMSM 、磁链估算、转矩估算、转子位置估算、开关表和调节器等组成.控制系统将电机给定转速和实际转速的误差,经调节器输出给定转矩信号;同时系统根据检测的电机三相电流和电压值,利用磁链模型和转矩模型分别计算电机的磁链和转矩大小,计算电机转子的位置、电机给定磁链和转矩与实际值的误差;然后根据它们的状态选择逆变器的开关矢量,使电机能按控制要求调节输出转矩,最终达到调速的目的.图1 直接转矩控制系统框图Fig.1 Block diagram of direct torque controlsystem在实际的直接转矩控制系统中,需要采样电机的三相电流,且需进行坐标变换以便于计算.各坐标变换关系如图2所示.图2 坐标变换矢量图Fig.2 Vector diagram of different reference flame坐标变换公式为x αx β=231 -12 -12・x ax bx c (7)x αx β=cos θ -sin θsin θ cos θ・x d x q(8)式中:x α、x β表示α—β坐标系变量;x a 、x b 、x c 分别表示abc 坐标系变量.在两相α—β坐标系下,电机定子磁链在α—β轴上的分量ψα和ψβ可表示为ψα=∫(u α-R s ・i α)d t (9)ψβ=∫(u β-R s ・i β)d t(10)式中u α、u β、i α、i β分别为电机电压和电流在α—β坐标轴的分量,而定子磁链的位置则可通过α—β轴的分量和它们的正负号来决定.由式(5),(8)可以推导出α—β坐标系的转矩估算公式如下:T e =32n p (ψαi β-ψβi α)(11)前面已经介绍过,D TC 系统是根据电机的转矩误差状态、磁链误差状态和磁链位置来选择逆变器的开关信号.如果将逆变器的开关状态也进行定义,设逆变器桥臂上管导通时定义为状态“1”,下管通时定义为“0”,则三相桥臂上的开关S a 、S b 、S c 共有8种状态组合,其中6个非零电压矢量V 1~V 6和两个零电压矢量V 0、V 7的分布如图3所示.当施加电压矢量与ψs 夹角小于π2时,将使磁链幅值增加;当大于π2时,磁链幅值减小.当电压矢量超前于ψs 时,转矩增加;落后于ψs 时,转矩减小.图3 电压矢量和区段划分Fig.3 Voltage vectors and zoning用<、τ分别表示电机磁链和转矩的给定值和实际值的误差状态,当给定值比实际值大时状态为1,否则状态为0,则由<、τ的状态以及磁链所处分区的位置,便可按表1选择开关电压矢量.表1中的S 是为了便于在Simulink 中实现查表而设置的一个变量S =2<+τ+1(12)表1 直接转矩控制系统开关表Table 1 Switching table for DTC systemS <τθ1θ2θ3θ4θ5θ6411V 6V 2V 3V 1V 5V 4310V 5V 4V 6V 2V 3V 1201V 2V 3V 1V 5V 4V 61V 1V 5V 4V 6V 2V 320 华南理工大学学报(自然科学版)第32卷 2 系统仿真模型的组建在PMSM D TC 仿真系统中,主要使用Simulink 库和PSB (Power System Blockset )库中的模块.本研究的仿真模型是基于MA TLAB 6.1/Simulink 4.1上构建[4].2.1 仿真系统利用Simulink 搭建图1的仿真模型如图4所示.它包括3/2变换、磁链估算和转矩估算等子系统.进行磁链估算时,磁链初值不宜为0,否则仿真会出错.因此在磁链估算子系统中,要给积分模块(Integrator )赋一个初值(Initial C ondition ),本文中设为0.01.图4 基于MA TLAB/Simulink 的PMSM DTC 系统的仿真模型Fig.4 Simulation model of PMSM DTC system based on MA TLAB/Simulink 在逆变器和PMSM 子模块间,接入电压测量装置以观测A 、B 相间电压,因为当Simulink 模块与PSB 模块相连时,要求接入一个电气测量模块,否则仿真会出现错误.2.2 区段判断的实现定子磁链矢量所在的区段我们可以根据磁链在α—β坐标上的分量进行判定,由ψα的正负确定定子磁链矢量的象限,再由αtan (ψβψα)决定定子磁链矢量的具体位置.其实现模块如图5所示.其中的MA TLAB 函数模块是用来调用MA TLAB 中求反正切的函数,开关模块是一个2选1的输出,其输出再经过图5(b )子系统便可以得到区段结果.表2为磁链位置所对应的区段值.2.3 转矩调节信号τ和磁链调节信号<在转矩控制系统中,转矩给定T 3e 是由速度环PI 控制器输出获得的.磁链和转矩的误差信号,按式(12)进行计算以后输出,磁链和转矩的误差信号的具体实现过程如图6所示.图5 磁链区段的确定Fig.5 Determining the sector of flux linkage表2 磁链区段和角度的关系T able 2 Relationship between flux linkage sector and delta角度区段角度区段[-π/2,-π/6)θ6[-π/6,π/6)θ1[π/6,π/2)θ2[π/2,5π/6)θ3[5π/6,7π/6)θ4[7π/6,3π/2)θ5 第1期谢运祥等:基于MA TLAB/Simulink 的永磁同步电机直接转矩控制仿真建模21图6 转矩和磁链误差信号Fig.6 Error signal of torque and flux linkage2.4 其他模型的建立按照以上相类似的方法,我们对逆变器及其驱动信号、坐标的变换、u α和u β的获取、电机磁链的估算和转矩的估算等等,建立相应的Simulink 模型,如图7所示.图7 PMSM DTC 仿真系统的其他子系统Fig.7 Other subsystems in the PMSM DTC systemsimulation model3 仿真结果及分析在仿真开始以前,可执行菜单S imulation —S imu 2lation Parameters 设定仿真参数.本系统的PMSM 参数设定为:定子电阻R s =3Ω,直、交轴的等效电感L d =L q =0.168H ,转子磁链ψf =0.175Wb ,转动惯量图8 转速、磁链轨迹和转矩的仿真结果Fig.8 Simulation results of rotation s peed ,flux linkagetrail route and torque22 华南理工大学学报(自然科学版)第32卷 J =0.0008kg ・m 2,粘滞系数B =0,极对数n p =2.在此基础上便可以仿真分析控制系统的性能指标以及各因素的影响.图8是直接转矩控制系统的电机磁链轨迹、转速、转矩波形.图9反映了转矩滞环宽度对转矩脉动的影响,减小滞环宽度,有利于降低转矩脉动幅度.图10是负载和给定转速突变时的转矩和转速波形,其结果表明系统在阶跃变化时能够自动保持稳定运行状态.表3是通过仿真研究得到的不同PI 参数对系统性能的影响.图9 转矩滞环环宽对转矩脉动的影响Fig.9 E ffect of torque hysteresis width on thetorqueripple图10 系统的转速、转矩响应Fig.10 Torque and rotation s peed response of the system表3 PI 控制器参数对系统性能的影响Table 3 E ffect of PI controller parameters on systemperformance序号积分系数K i比例系数K p饱和限幅值稳定时间/s 转速超调/%10.02 1.5[-1.6,1.6]0.0580.6320.02 2.0[-1.6,1.6]0.0250.6530.10 1.5[-3.0,3.0]0.113 6.2540.10 2.0[-1.6,1.6]0.0680.7550.502.0[-1.6,1.6]0.0400.114 结束语利用MA TLAB/Simulink 建立永磁同步电机直接转矩控制系统,可以从理论上研究控制系统的性能及其相关因素的影响,仿真结果和分析所得到的结论是可信的.在建立实际系统之前,通过仿真研究对控制系统进行充分论证,可以提高研究效率.参考文献:[1] T akahashi I ,Noguchi T.A new quick 2res ponse and high 2effi 2ciency control strategy of an induction m otor [J ].IEEE T rans on Industrial A pplications ,1986,22(5):821-827.[2] Zhong L ,Rahman M F.Analysis of direct torque controlin permanent magnet drives [J ].IEEE Transactions on Power Electronics ,1997,12(3):528-535.[3] 田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J ].电工技术学报,2002(2):8-11.[4] 王沫然.Simulink 4建模及动态仿真[M ].北京:电子工业出版社,2002.Simulation and Modeling of Direct Torque Control of Perm anent 2m agnet Synchronous Motor B ased on MAT LAB/SimulinkXie Y un 2xiang L u Zhu 2qiang(College of Electric Power ,S outh China Univ.of Tech.,Guan gzhou 510640,Guangdong ,China )Abstract :The modeling of direct torque control system of permanent 2magnet synchronous motor based on MA TLAB/Simulink was introduced ,and the simulation of the system was carried out to research on the effect of PI controller parameters on the system performances.Also ,the relationship between torque hysteresis loop ’s width and torque ripple amplitude was analyzed.The results show that the direct torque control system gives a good response to the rotation speed and torque ,and that the torque ripple amplitude decreases with the reduction of torque hysteresis loop ’s width.The PI controller parameters K p and K i should be properly matched to achieve excellent system performance ,for a large scaling factor K p will accelerate the system ’s dynamic response ,while the integral coefficient K i mainly influences the system ’s static error.K ey w ords :synchronous motor ;direct torque control ;simulation ;MA TLAB/Simulink modeling 第1期谢运祥等:基于MA TLAB/Simulink 的永磁同步电机直接转矩控制仿真建模23。
书目1 前言............................................................................................................... - 0 -1.1 无刷直流电机的发展......................................................................... - 0 -1.2 无刷直流电机的优越性..................................................................... - 0 -1.3 无刷直流电机的应用......................................................................... - 1 -1.4 无刷直流电机调速系统的探讨现状和将来发展............................. - 1 -2 无刷直流电机的原理................................................................................... -3 -2.1 三相无刷直流电动机的基本组成..................................................... - 3 -2.2 无刷直流电机的基本工作过程......................................................... - 5 -2.3 无刷直流电动机本体......................................................................... - 6 -2.3.1 电动机定子............................................................................... - 6 -2.3.2 电动机转子............................................................................... - 7 -2.3.3 有关电机本体设计的问题....................................................... - 7 -3 转子位置检测............................................................................................... - 8 -3.1 位置传感器检测法............................................................................. - 8 -3.2 无位置传感器检测法....................................................................... - 10 -4 系统方案设计............................................................................................. - 12 -4.1 系统设计要求................................................................................... - 12 -4.1.1 系统总体框架......................................................................... - 12 -4.2 主电路供电方案选择....................................................................... - 13 -4.3 无刷直流电机电子换相器............................................................... - 14 -4.3.1 三相半控电路......................................................................... - 15 -4.3.2 三相全控电路......................................................................... - 15 -4.4 无刷直流电机的基本方程............................................................... - 16 -4.5 逆变电路的选择............................................................................... - 19 -4.6 基于MC33035的无刷直流电动机调速系统................................... - 20 -4.6.1 MC33035无刷直流电动机限制芯片...................................... - 20 -4.6.2 基于MC33035的无刷直流电动机调速系统设计 ................ - 21 -5 无刷直流电机调速系统的MATLAB仿真................................................... - 23 -5.1 电源、逆变桥和无刷直流电机模型............................................... - 24 -5.2 换相逻辑限制模块........................................................................... - 26 -5.3 PWM调制技术.................................................................................... - 31 -5.3.1 等脉宽PWM法......................................................................... - 33 -5.3.2 SPWM(Sinusoidal PWM)法..................................................... - 33 -5.4 限制器和限制电平转换及PWM发生环节设计............................... - 33 -5.5 系统的仿真、仿真结果的输出及结果分析................................... - 35 -5.5.1 起动,阶跃负载仿真............................................................. - 35 -5.5.2 可逆调速仿真......................................................................... - 37 -6 总结和体会................................................................................................. - 39 -无刷直流电机调速限制系统设计1前言直流无刷电机,无机械刷和换向器的直流电机,也被称为无换向器直流电动机。
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
无刷直流电机simulink数学模型全文共四篇示例,供读者参考第一篇示例:无刷直流电机是一种常用的电动机,它能够实现高效率、低噪音和长寿命的特点,在许多领域得到了广泛的应用。
在无刷直流电机的设计和优化过程中,数学模型起着至关重要的作用,可以帮助工程师快速准确地进行仿真和分析。
本文将介绍无刷直流电机的数学模型,并利用Simulink软件进行建模和仿真。
1. 无刷直流电机的工作原理无刷直流电机是一种将电能转换为机械能的电动机。
它的主要部件包括定子、转子和电子换向器。
定子由绕组和铁芯组成,绕组产生的电磁场使得转子受到力矩作用。
电子换向器通过改变绕组的电流方向,实现电机的正常运转。
在工作时,电机的转子在定子的作用下旋转,通过电流和磁场的相互作用产生力矩,驱动负载进行工作。
无刷直流电机具有结构简单、响应速度快和效率高的特点,因此在各种领域广泛应用。
为了更好地理解和优化无刷直流电机的性能,需要建立合适的数学模型。
一般来说,无刷直流电机可分为电气模型和机械模型两部分。
电气模型主要描述了电机的电学特性,包括电阻、电感和电压之间的关系。
常用的无刷直流电机电气模型为dq轴电压方程和dq轴电流方程,通过这些方程可以计算出电流和电压的关系,进而控制电机的转速和扭矩。
机械模型主要描述了电机的力学特性,包括转矩、惯性和阻尼等参数。
通过机械模型可以计算出电机的惯性及转矩响应,帮助工程师设计合适的控制算法以提高电机的性能。
综合考虑电气模型和机械模型,可以建立完整的无刷直流电机数学模型,用于仿真和优化工作。
3. Simulink建模与仿真Simulink是一种广泛应用于工程仿真的软件工具,通过图形化编程的方式可以方便地进行建模和仿真。
对于无刷直流电机的数学模型,Simulink提供了丰富的工具和模块,可以快速搭建仿真模型,并进行性能评估。
在Simulink中,可以使用Stateflow来建立无刷直流电机的控制逻辑和状态机,通过组合电气模型和机械模型,可以实现对电机的全面控制。
基于无刷直流电机的电子差速控制系统建模与仿真作者:杨树军来源:《科学大众》2019年第06期摘; ;要:文章利用Matlab/Simulink对无刷直流电机进行了仿真研究,并搭建电子差速系统的仿真模型图,分别对固定角度其他量变化、固定车速其他量变化两部分进行模拟仿真,并在此基础上加上小幅度正弦波动测定电子差速模型在正弦干扰下的动态响应,并模拟实际加减速、转弯S路等情况,模拟出了左右轮速的动态响应曲线。
关键词:无刷直流电机;Matlab/Simulink;电子差速1; ; 无刷直流电机的物理模型无刷直流电机为三相电流驱动,用电机驱动输入PWM将直流电源分成A、B、C三相电流,不同的PWM对应不同的A、B、C三相电流,使电机能够提供不同的转速和转矩等。
对应着相应的Simulink中DC电机的三相A、B、C。
同时Tm为电机提供时钟,在实物中也有对应接口,因此,用Simulink中DC电机来替代该电机很合适且具有实际意义。
2; ; 直流电机Simulink建模与仿真2.1; 电机矢量方程分析首先,确定电机的矢量方程,进行分析后为Simulink的建模做准备。
在建立数学模型前,假设:(1)忽略铁芯磁阻、涡流、磁滞的损耗。
(2)永久磁铁材料电导率为零时,永磁体的磁导率等于空气磁导率。
(3)转子上没有阻尼绕组。
(4)励磁磁场和电枢反应磁场以及相绕组感应电动势波形为正弦波。
根据3项绕组的电压方程推导,且ψA、ψB、ψC为相绕组的全磁链,有如下推导公式:(1)此时,通过磁场产生的磁链为ψfA、ψfB、ψfB。
因为磁场气隙均匀,所以A、B、C绕组自感与绕组互感与转子位置无关,此时LA=LB=LC=Lsσ+Lml。
2.2; 电机建模仿真根据无刷直流电机直接转矩控制系统的原理,将Matlab/Simulink作为仿真工具,构建基于无刷直流电机直接转矩控制系统的仿真模型。
模型的输入端为PWM,根据创新项目中的要求,输出为八位PWM,输出则为电机转矩和转速,得出转矩响应曲线(见图1)。
无刷直流电机调速系统的建模与仿真分析摘要:本文基于电机运行方程建立无刷直流电机的仿真模型,对无刷直流电机的转速环、电流环双环控制策略进行仿真,通过仿真结果验证无刷直流电机仿真模型的有效性以及控制策略的有效性。
主题词:无刷直流电机;建模;仿真;控制。
1 无刷直流电机控制系统的组成本文所建立的无刷直流电机控制系统由无刷直流电机、三相电压型逆变器、检测电路、控制电路组成,采用速度环和电流环双环控制,如图1所示。
速度环利用与电机同轴的霍尔传感器检测电机的转速,与参考转速进行比较,速度环的输出作为电流环三相参考电流的幅值,结合电机转子的位置信息得到电流环的参考电流,,。
电流检测电路测量无刷直流电机的三相定子电流、、,与三相参考电流进行滞环比较,电流环的输出经过控制电路转化为逆变器开关管IGBT的的控制信号,控制逆变器输出无刷直流电机需要的定子电流。
图1 无刷直流电机控制系统的组成框图3 无刷直流电机控制系统的数学模型3.1电机数学模型无刷直流电机定子绕组为三相Y型接法,两两导通方式,驱动电路采用三相全桥逆变电路。
为了方便分析BLDCM的数学模型及电磁转矩等特性,作如下假设[2]:(1)三相绕组完全对称,气隙磁场分布为梯形波,平顶宽为120°电角度;(2)忽略齿槽、换相过程和电枢反应的影响;(3)磁路不饱和,不计涡流和磁滞损耗;(4)电枢绕组在定子内表面均匀连续分布。
3.1.1 电压平衡方程BLDCM的电压平衡方程如公式1所示。
(1)式中,、、——定子各相电压,单位:V;——定子电阻,单位:;、、——定子各相电流,单位:A;,——定子电感,互感,单位:H;、、——各相反电势,单位:V。
3.1.2 转矩方程和机械运动方程BLDCM的转矩方程如公式2所示,机械运动方程如公式3所示。
(2) (3)式中,——电磁转矩,单位;——电机转子减速度,单位rad/s;——负载转矩;单位为;——转动惯量,单位为;——阻尼系数,单位为。
目录一、前言二、系统方案设计1、系统设计要求 (2)2、系统总体框架 (3)3、主电路供电方案选择 (3)4、逆变电路的选择 (4)三、基于MC33035的无刷直流电动机调速系统 (5)1、MC33035无刷直流电动机控制芯片 (5)2、基于MC33035的无刷直流电动机调速系统设计 (7)四、无刷直流电机调速系统的MATLAB仿真 (9)1、电源、逆变桥和无刷直流电机模型 (10)2、换相逻辑控制模块 (10)3、PWM调制技术 (14)3.1、等脉宽PWM法 (16)3.2、SPWM(Sinusoidal PWM)法 (16)4、控制器和控制电平转换及PWM发生环节设计 (17)5、系统的仿真、仿真结果的输出及结果分析 (18)5.1、起动,阶跃负载仿真 (18)5.2、可逆调速仿真 (20)一、前言无刷直流电机的发展直流电动机由于其在运动控制领域的卓越扭矩特性已得到广泛应用,与传统的直流电动机和机械毛刷,可靠性差的需要,减刑会产生电磁干扰,噪声,火花,无线电干扰和寿命短的致命弱点,具有较高的生产成本和维修问题的严重影响,如联合直流电动机控制系统的进一步发展的弊端。
随着社会生产力,人民生活水平不断提高的发展,他们不断开发新类型的电机。
科学技术的进步,新兴技术和新材料,同时也进一步推动电动汽车将继续推出新产品。
对于传统的直流电机,只要30年早在20世纪的上述缺点,人们开始开发一个电子交流始终以取代无刷直流电动机刷机,并提出相应数量的结果。
但是,这只是高功率处于发展的初级阶段的电子设备,没有找到理想的电子换向元件。
使这个运动只能停留在实验室研究阶段,没有推广。
1955年,美国四哈里森,谁首先提出了晶体管使用该电机接替该专利申请的机械换向器,这是现代无刷直流电动机的原型。
但是,因为没有马达的起动转矩,使其不能成为产品。
后来,经过多年的艰苦工作的人,终于由霍尔元件实现无刷直流电动机换意味着在1962年来,创造了直流无刷电机产品的时代。